Изобретение относится к станкостроению и может быть использовано в станках с гидравлическим, пневматическим или электрическим приводами вращающихся или возвратно-поступательно движущихся узлов.
Целью изобретения является упрощение конструкции, повышение точност и надежности работы устройства.
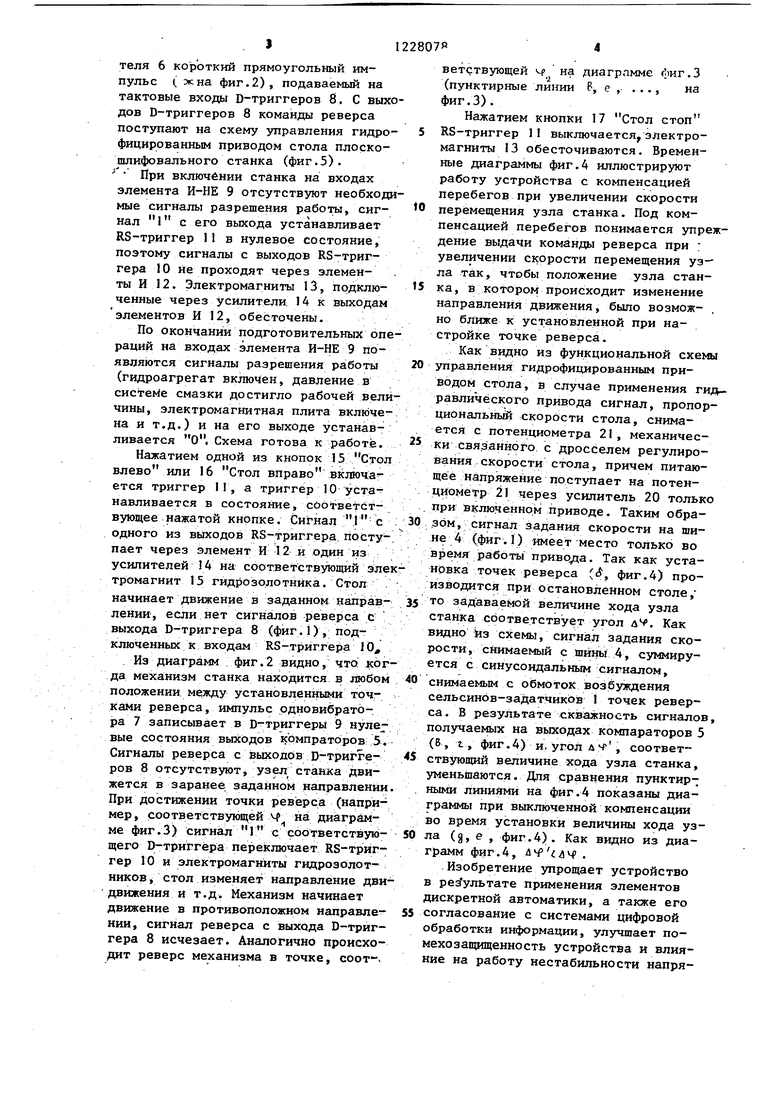
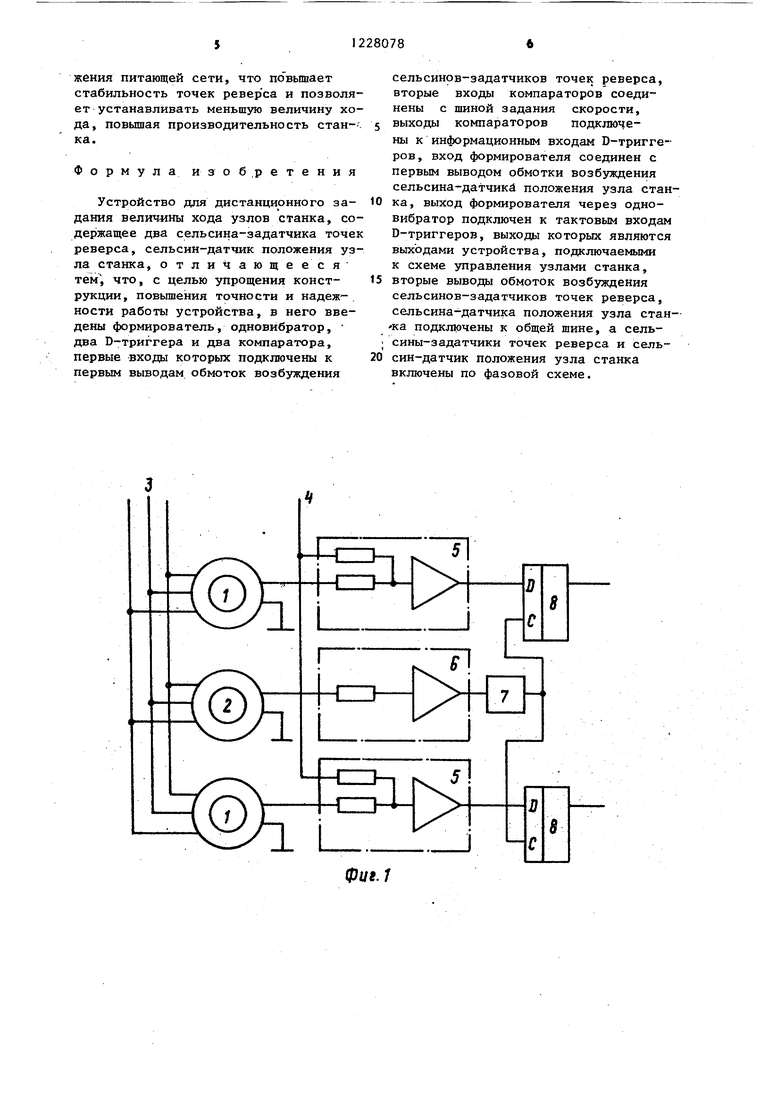
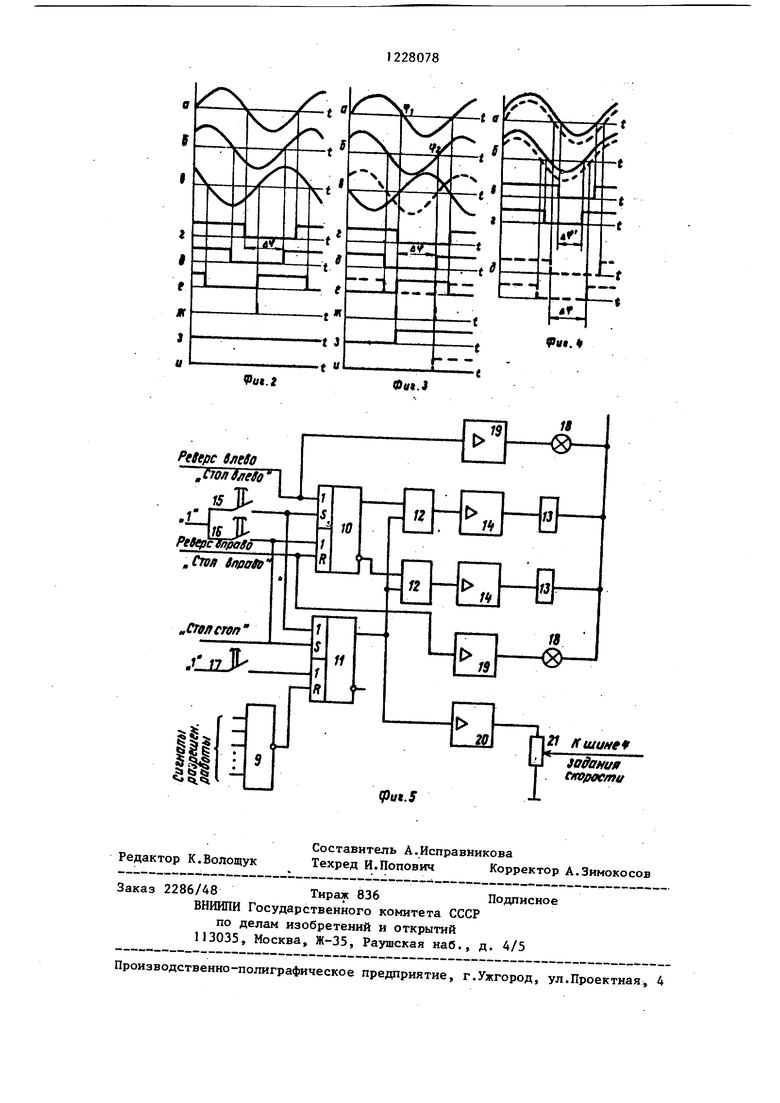
На фиг. 1 приведена функциональная схема устройства; на фиг.2-4 - временные диаграммы его работы; на фиг.5 - функциональная схема управления гидрофицированным приводом стола
На фиг.2 и 3 обозначено: а , б - синусоидальные сигналы с обмоток возбуждения сельсинов-задатчиков 1 точек реверса: В - синусоидальные сигналы с обмоток возбуждения сельсина-датчика 2 положения узла; i ,з выходные напряжения компараторов 5; 6 - выходное напряжение формирователя 6; -х- выходной сигнал одновиб- ратора 7; J , - выходные напряжения D-триггеров В; &Ч - сдвиг фаз между сигналами, снимаемыми с обмоток возбуждения сельсинов-задатчиков 1 точек реверса; 4, точки реверса узла станка.
На фиг. 4 обозначено: а. , 5 - синусоидальные сигналы с обмоток возбуждения сельсинов-задатчиков 1 точек реверса; 6 , г - выходные напряжения компараторов 5; з, - выходные напряжения компараторов при выключенной компенсации во время установки величины хода узла станка; ЛЧ - сдвиг фаз между сигналами, снимаемыми с обмоток возбуткдения сельсинов-задатчиков 1 точек реверса.
Устройство содержит два сельси- на-задатчика 1,, 1 точек реверса узла станка, сельсин-датчик 2 положения узла, обмотки синхронизации которых подключены к шинам 3 источника трехфазного напряжения, шину 4 сигнала задания скорости движения узла станка, компараторы 5, формирователь 6, одновибратор 7j два D-триг- гера 8.
Функциональная схема управления . гидрофицированным приводом стола содержит элемент И-НЕ 9, RS-триггеры 1О и 11 с функцией 2 ИЛИ по входам, элементы И 12, электромагниты 13, усилители 14, кнопки управления 15- 17, лампы сигнализации 18, усилители 19 и 20, потенциометр 21.
S
0
5
0
5
0
5
0
5
Предлагаемое устройство дистанционного задания величины хода узлов станка является частью системы управления станком. В качестве примера приведена функциональная схема- управления гидрофицированным приводом стола плоскошлифовального станка (фиг.5).
Устройство работает следующим образом.
Величина хода может устанавливаться двумя способами:
-по шкалам сельсинов, проградуи- рованным в единицах длины рабочей поверхности стола. Указатели на рукоятках сельсинов оператор устанав ливает против меток, соответствующих координатам крайних точек обрабатываемого изделия, размещенного на столе;
-по индикаторным лампам 18, подключенным через усилители 19 к выходам D-триггеров 8 устройства (фиг.1).
Поворотом рукояток сельсинов до упоров устанавливают максимальный ход стола. При помощи кнопок 15-17 стол с размещенным на нем обрабатыва- емым изделием перемещают влево и останавливают так, чтобы правая крайняя точка обрабатываемого изделия находилась под режущей кромкой инструмента. Медленно поворачивают рукоятку сельсина Реверс вправо до включения соответствующей лампы 18. Аналогично устанавливается точка реверса стола влево. Сельсинами-задатчика- ми 1 устанавливают необходимую величину хода узла станка, которой будет соответствовать сдвиг фаз 180 - -йЧ(фиг.2) между сигналами, снимаемыми с обмоток возбуждения сельсинов- задатчиков 1 точек реверса. Вал сельсина-датчика 2 кинематически связан с механизмом так, чтобы максимальный ход узла станка соответствовал углу поворота вала сельсина-датчика 2 менее 180 . Синусоидальные сигналы с обмоток возбуждения сельсинов 1 и 2 (d ,5 jB на фиг.2) поступают на входы компараторов 5 и формирователя 6, вырабатывающих меандр (г, о , е на фиг.2). С выходов компараторов 5 сигналы поступают на информационные входы D-триггеров 8, а с выхода формирователя 6 - на одновибратор 7, вырабатывающий по переднему фронту сигнала формирователя 6 короткий прямоугольный импульс ( ж на фиг.2), подаваемый на тактовые входы D-триггеров 8, С выходов D-триггеров 8 команды реверса поступают на схему управления гидро- фицированным приводом стола плоскошлифовального станка (фиг.5).
При включении станка на входах элемента И-НЕ 9 отсутствуют необходимые сигналы разрешения работы, сигнал 1 с его выхода устанавливает RS-триггер 11 в нулевое состояние, поэтому сигналы с выходов RS-триг- гера 10 не проходят через элементы И 12. Электромагниты 13, подключенные через усилители 14 к выходам
элементов И 12, обесточены.
По окончании подготовительных операций на входах элемента И-НЕ 9 появляются сигналы разрешения работы (гидроагрегат включен, давление в системе смазки достигло рабочей величины, электромагнитная плита включена и т.д.) и на его выходе устанавливается о, Схема готова к работе.
Нажатием одной из кнопок 15 Стол влево или 16 Стол вправо включается триггер II, а триггер 10 устанавливается в состояние, сбо гветст- вующее нажатой кнопке. Сигнал I с одного из выходов RS-Триггера. поступает через элемент И 12 и один из усилителей 14 на соответствующий элетромагнит 15 гидрозолотййка. Стол начинает движение в заданном направлении, если нет сигналов реверса с выхода D-триггера 8 (фиг.1), подключенных к входам RS-триггера 10,
Из диаграмм фиг.2 видно, что когда меха:низм станка находится в любом положении между установленными точками реверса, импульс рдновибрато- jpa 7 записывает в D-триггеры 9 нулевые состояния выходов компраторов 5. Сигналы реверса с выходов D-триггеров 8 отсутствуютj узел станка движется в заранее заданном направлении При достижении точки реверса (например, соответствующей Ч на диаграмме фиг.З) сигнал 1 с соответствующего р-триггёра переключает RS-триггер 10 и электромагниты гидрозолотников , стол изменяет направление дви движения и т.д. Механизм начинает движение в противоположном направлении, сигнал реверса с выхода D-триггера 8 исчезает. Аналогично происходит реверс механизма в точке,
ветствующей ч на диаграмме фиг.З (пунктирные линии Р, е , ..., на фиг.З).
Нажатием кнопки 17 Стол стоп
RS-триггер 11 выключается, электромагниты 13 обесточиваются. Временные диаграммы фиг.4 иллюстрируют работу устройства с компенсацией перебегов при увеличении скорости
перемещения узла станка. Под компенсацией перебегов понимается упреждение выдачи команды реверса при : увеличении скорости перемещения узла так, чтобы положение узла станка, в котором происходит изменение направления движения, было возмож- . но ближе к установленной при настройке точке реверса.
Как видно из функциональной схемы
управления гидрофидированным приводом стола, в случае применения . равличёского привода сигнал, пропорциональный скорбсти стола, снимается с потенциометра 21, механически связанного с дросселем регулирования скорости стола, причем питающее напряжение поступает на потенциометр 21 через усилитель 20 только при включенном приводе. Таким образом, сигнал задания скорости на шине 4 (фиг. 1) имеет место только во время работы приво.да. Так как установка точек реверса С, фиг.4) производится при остановленном столе ,
то задаваемой величине хода узла станка соответствует угол dV. Как видно из схемы, сигнал задания скорости , снимаемый с шины 4, суммируется с синусоидальным сигналом,
снимаемым с обмоток возбуждения
сельсинбв-задатчикбв 1 точек реверса. В результате скважность сигналов, получаемых на выходах компараторов 5 (В, t, фиг.4) и, угол ду соответствующий величине хода узла станка, уменьЩаются. Для сравнения пунктирными линиями на фиг.4 показаны диаграммы при выключенной компенсации во время установки величины хода узла (д, е , фиг.4). Как видно из диаграмм фиг.4, u f iA .
Изобретение упрощает устройство в рей ультате применения элементов дискретной автоматики, а также его
согласование с системами цифровой обработки информации, улучшает помехозащищенность устройства и влияние на работу нестабильности напря
жения питающей сети, что по вьшает стабильность точек реверса и позволяет устанавливать меньшую величину хода, повышая производительность стан-ка.
Формула изобретения
Устройство для дистанционного за- Дания величины хода узлов станка, содержащее два сельсина-задатчика точек реверса, сельсин-датчик положения узла станка, отличающееся тем, что, с целью зшрощения конст- рукции, повышения точности и надеж- . ности работы устройства, в него введены формирователь, одновибратор, два D-триггера и два компаратора, первые входы которых подключены к первым выводам обмоток возбуждения
сельсинов-задатчиков точек реверса, вторые входы компараторов соединены с шиной задания скорости, выходы компараторов подключены к информационным входам D-тригге- ров, вход формирователя соединен с первым выводом обмотки возбуждения сельсина-датчикй положения узла станка, выход формирователя через одно- вибратор подключен к тактовым входам D-триггеров, выходы которых являются выходами устройства, подключаемыми к схеме управления узлами станка, вторые выводы обмоток возбуждения сельсинов-задатчиков точек реверса, сельсина-датчика положения узла стан- ка подключены к общей шине, а сель- сины-задатчики точек реверса и сельсин-датчик положения узла станка включены по фазовой схеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Многоканальный измерительный стрелочный прибор | 1987 |
|
SU1504619A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Устройство управления перемещением стола продольно-обрабатывающего станка | 1983 |
|
SU1077753A1 |
| Преобразователь угла поворота вала в напряжение | 1984 |
|
SU1193807A1 |
| Устройство частотно-импульсного регулирования тока RL-нагрузки | 2023 |
|
RU2810553C1 |
| Устройство для регулирования температуры | 1985 |
|
SU1260928A1 |
| Преобразователь угла поворота антенны радиолокационной станции в код | 1983 |
|
SU1119052A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1305543A1 |
Изобретение относится к станкостроению и может быть использовано в станках с гидравлическим, пневматическим или электрическим приводом вращающихся или возвратно-поступательно движущихся узлов и позволяет упростить конструкцию, повысить надежность и .точность работы устройства. Сельсинами задается необходимая величина хода узла станка. Синусоидальные сигналы с обмоток возбуждения сельсинов постзшают на входы компараторов и формирователя. С выходов компараторов сигналы поступают на информационные входы D-триггеров, а с выхода формирователя - на одновиб- ратор, который выдает короткий импульс на тактовые входа D-триггеров. С выхо- р дов D-триггеров команды реверса поступают на схему управления гидрофици- рованным приводом стола плоскошлифовального станка. 5 ил. k S v с ю to 00 о СХ)
Фи9.1
Pot.i
Фа.}
flffeflc t/ieSo
49i/c.5
Редактор К.Волощук
Составитель А.Исправникова
Техред И.Попович Корректор А.Зимокосов
Заказ 2286/48Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Дащенко А.И., Шмелев А.И | |||
| Конструкции и наладка агрегатных станков | |||
| М.: Высшая школа, 1965, с | |||
| Телефонно-осведомительный аппарат | 1921 |
|
SU306A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛИНОЙ ХОДА ГИДРОФИЦИРОВАННЫХ УЗЛОВ СТАНКОВШШйО-Т?ХН8^С|ВСЕСОЮЗНА? | 0 |
|
SU350634A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
