t . 130 Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках, станках-автоматах и автоматических линиях
Цель изобретения - повышение производительности балансиройки за счет исключения операции установки статора датчика фазы в исходное пoлoжe1 иe.
На чертеже изображена структурная схема предлагаемого устройства.
Устройство для коррекции дисбаланса содержит, кинематически связанные исполнительный механизм 1, привод 2 перемещения исполнительного механизм и датчик 3 фазы, подключенный к нему трехфазный генератор 4, выполненный в виде соединенных последовательно генератора 5 импульсов, делителя 6 частоты и счетчика 7 Джонсона, последовательно соединенные фильтр 8 нижни частот, связанный с выходом датчика Эмфазы, нуль-компаратор 9, фазоимпуль сный детектор 10, второй фильтр 11 нижних частот и схему 12 сравнения, RS-триРгер 13, R-вход которого соединен с выходом схемы 12 сравнения, а выход - с входом привода 2 перемещения исполнительного механизма, блок 14 измерения дисбаланса, соединенный с вторым входом схемы 12 сравнения, блок 15 управления, соединенный с S- входом RS-триггера 13, счетчик 16, С-вход которого соединен с выходом генератора 5 импульсов, а выход - с вторым входом фазоимпульсного детектора 10, формирователь17, вход которого соединен с выходом нуль-компаратора 9, логический элемент 2И 18, первый вход которого соединен с выходом формирователя 17, второй - с вторым выходом блока 15 управления, а выход с R-входом счетчика 16, и по
следовательно соединенные второй c4eT-,j снимаемый с обмотки возбуждения сельчик 19, С-вход которого соединен с выходом генератора 5 импульсов, СЕ- вход с выходом фазоимпульсного детектора 10, а R-вход - с выходом формирователя 17, и цифровой индикатор 20. Устройство работает следующим образом.
Параметры дисбаланса балансируемого ротора (не показан) измеряются блоком 14 измерения дисбаланса. После окончания измерения блок 14 измерения переключается в режим хранения, информация об угле дисбаланса используется для определения места коррекции
50
сина, поступает на вход фи.пьтра 8 нижних частот, который подавляет сол держащиеся в нем высокочастотные составляющие . Синусоидальный выходной сигнал фильтра 8 нижних частот преобразуется нуль-компаратором 9 в прямоугольные импульсы типа меандр частоты 0), фаза которых несет .информацию об угловом положении ротора датчика 3 фазы.
Так как статор сельсина при сборке станка устанавливается в произвольное угловое положение, то фаза импульсов на выходе нуль-компаратора 9 при ис
на роторе, а о значении дисбаланс - для определения корректирующей массы.
После поворота балансируемого ротора до совмещения места коррекции с осью исполнительного механизма 1, в качестве которого может использоваться, например, сверлильная головка, приступают к коррекции дисбаланса.
Исполнительный механизм 1 приводится в движение в осевом направлении приводом 2 перемещения исполнительного механизма, который при подаче на его вход постоянного напряжения (логическая 1) обеспечивает перемещение сверла по направлению к поверхности балансируемого ротора, а при выключении напряжения (логический О) - в противоположном. Исполнительный механизм 1 выполнен таким образом, что вращение кинематически связанного с ним ротора датчика 3 фазы начинается только после касания сверла поверхности балансируемого ротора, т.е. с началом рабочего перемещения. При этом угол поворота ротора датчика 3 фазы пропорционален величине рабочего перемещения и соответственно массе высверленного материала.
В качестве датчика 3 фазы используется, например, сельсин в режиме фазовращателя. Для этого на его обмотки синхронизации с трехфазного генератора 4 подаются прямоугольные импульсы типа меандр с частотой СО и взаимным сдвигом фаз 120 .
Формирование этих импульсов Осуществляет входящий в состав трехфазного генератора 4 трехфазный счетчик 7 Д консона. Последний тактируется импульсами, образующимися в результате деления частоты генератора 5 импульсов делителем 6 частоты.
Выходной сигнал датчика 3 фазы.
,j снимаемый с обмотки возбуждения сель50
сина, поступает на вход фи.пьтра 8 нижних частот, который подавляет сол держащиеся в нем высокочастотные составляющие . Синусоидальный выходной сигнал фильтра 8 нижних частот преобразуется нуль-компаратором 9 в прямоугольные импульсы типа меандр частоты 0), фаза которых несет .информацию об угловом положении ротора датчика 3 фазы.
Так как статор сельсина при сборке станка устанавливается в произвольное угловое положение, то фаза импульсов на выходе нуль-компаратора 9 при исходном положении его ротора имеет тоже произвольное значение.
Чтобы учесть фазу исходного положения датчика 3 фазы при. контроле за рабочим перемещением исполнительного механизма 1, фаза выходного сигнала нуль-компаратора 9 перед началом кор- рекции запоминается счетчиком 16, который тактируется выходными импульсами генератора 5 импульсов. Модуль счета этого счетчика выбирается равным произведению коэффициента деления делителя 6 частоты и модуля счета счетчика 7 Джонсона (например, 360), причем структура счетчика 16 выбира- J5 ется таким образом, чтобы выходные импульсы имели форму меандра (например, последовательно соединенные делитель частоты и счетчик с модулем.
вращаться и фаза выходного сигнала нуль-компаратора начинает смещаться относительно фазы исходного положения, запомненного счетчиком 16. Фа- зоимпульсный детектор 10 вырабатывает импульсы, длительность единичного уровня которых пропорциональна разности фаз сигналов на его входах. Фильтр 11 нижних частот вьщеляет постоянную составляющую выходного сигнала фазо- импульсного детектора 10, которая пропорциональна относительному углу поворота ротора датчика 3 фазы и соответственно величине рабочего перемещения сверла, т.е. корректирующей массе. Схема 12 сравнения сравнивает выходное напряжение фильтра 11 нижних частот с напряжением на выходе .блока 14 измерения дисбаланса, пропорцио10
равным 2). Фаза отрицательных перепа-20н альным значению дисбаланса, и в модов прямоугольных симметричных им-мент их уравновешивания возвращает
пульсов частоты со, генерируемых счет-триггер 13 по R-входу в исходное нучиком 16, определяется фазой короткихлевое состояние. Привод 2 перемещения импульсов, поступающих на его R-вход
25
с формирователя 17 через логический элемент 2И 18, и совпадает с фазой выходного сигнала нуль-компаратора 9.
Поэтому, пока на втором выходе блока 15 управления сохраняется логическая единица и логический элемент 30 2И 18 открыт, сигналы на входах фазо- импульсного детектора 10 синфазны и .постоянная составляющая его выходного напряжения, выделяемая фильтром 11 нижних частот, равна нулю.
исполнительного механизма возвращает нсполпительный механизм 1 в исходное состояние. На этом цикл коррекции дисбаланса, заканчивается. .
Установка счетчика 19 производится выходными импульсами формирователя 17, которые совпадают с началом выходных импульсов фазоимпульсно- го детектора 10. На тактирующий вход (С-Бход) счетчика 19 поступают импульсы с генератора 5 импульсов, час35 тота которых в К раз больше частоты GD. На вход разрешения тактирования (СЕ-вход) поступают импульсы с выхода фазоимпульсного детектора 10, длительность t которых связана с углом ср поворота ротора: датчика 3 фа.зы отношением
Перёд началом коррекции дисбаланса, например, одновременно с командой, переключающей блок 14 измерения дисбаланса в режим хранения, на втором выходе блока 15 управления устанавливается нулевой уровень, блокирующий прохождение импульсов синхронизации через логический элемент 2И 18 на R-вход счетчика 16. С этого момента счетчик 16 переходит в режим хранения фазы сигнала, соответствующего исходному положению ротора датчика 3 фазы.
Коррекция дисбаланса начинается с того, что блок 15 управления по внешней команде, например, от кнопки (не показана) формирует импульс, устанавливающий R-триггвр в единичное состояние. При этом включается привод 2 перемещения исполнительного механизма и начинается движение сверле к поверхности балансируемого ротора. После касания ротор датчика фазы начинает
J5 55434
вращаться и фаза выходного сигнала нуль-компаратора начинает смещаться относительно фазы исходного положения, запомненного счетчиком 16. Фа- зоимпульсный детектор 10 вырабатывает импульсы, длительность единичного уровня которых пропорциональна разности фаз сигналов на его входах. Фильтр 11 нижних частот вьщеляет постоянную составляющую выходного сигнала фазо- импульсного детектора 10, которая пропорциональна относительному углу поворота ротора датчика 3 фазы и соответственно величине рабочего перемещения сверла, т.е. корректирующей массе. Схема 12 сравнения сравнивает выходное напряжение фильтра 11 нижних частот с напряжением на выходе .блока 14 измерения дисбаланса, пропорцио10
20н альным значению дисбаланса, и в молевое состояние. Привод 2 перемещения
исполнительного механизма возвращает нсполпительный механизм 1 в исходное состояние. На этом цикл коррекции дисбаланса, заканчивается. .
Установка счетчика 19 производится выходными импульсами формирователя 17, которые совпадают с началом выходных импульсов фазоимпульсно- го детектора 10. На тактирующий вход (С-Бход) счетчика 19 поступают импульсы с генератора 5 импульсов, час30
40
с
35 тота которых в К раз больше частоты GD. На вход разрешения тактирования (СЕ-вход) поступают импульсы с выхода фазоимпульсного детектора 10, длительность t которых связана с углом ср поворота ротора: датчика 3 фа.зы отношением
-То 360
.(Р
(П т
где Т - период частоты СО.
Соответственно десятичный код счетчика 19, отображаемый цифровым индикатором 20, будет иметь значение, пропорциональное углу ср. При число, отображаемое цифровь1м индикатором, соответствует углу с{, выраженному в градусах.
Предлагаемое устройство позволяем исключить операцию установки в исходное положение статора датчика фазы, обеспечить возможность удобного и точного отсчета величины рабочего перемещения сверла, что повышает производительность балансировочного станка.
Формула из. обретения Устройство для коррекции дисбаланса, содержащее кинематически связанные исполнительный механизм, привод перемещения исполнительного механизма и датчик фазы, подключенный к входам последнего трехфазный генератор, последовательно соединенные фильтр нижних частот, вход которого соединен с выходом датчика фазы, нуль-компара- тор и фазоимпульсный детектор, схему сравнения, соединенные, с ее входами второй фильтр нижних частот и блок измерения дисбаланса, блок управления, RS-триггер, R-вход которого со единен с выходим схемы сравнения, S-вход с выходом блока управления, а выход - с входом привода перемещения исполнительного механизма, и формирователь, отличающееся тем, что, с целью повышения производитель
Редактор А.Козориз
Составитель Ю.Круглов Техред Л.Сердюкова , Корректор А.Обручар
Заказ 1420/39Тираж .777 - . Подписное
ВНЙИШ 1 Государственйого комитета СССР
по делам изобретений и открытий 113035, Москва, ХС-35, Раушская наб., д. 4/5
..Производств енно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ноСти за счет исключения операции установки датчика фазы в исходное положение, оно снабжено логическим элементом 2И, входы которого соединены с вторым выходом блока управления и с выходом формирователя, вход которого соединен с выходом нуль-компаратора, первьм счетчиком, R-вход которого соединен с выходом логического элемента 2И, а выход - с вторым входом фазоимпульсного детектора, и последовательно соединенными вторым счетчиком, R-вход которого соединен с выходом формирователя, а СЕ-вход - с выходом фазоимпульсного детектора, и цифровым индикатором, а трехфазный генератор выполнен в виде последовательно соединенных генератора импуль сов, выход которого соединен с С-вхо- дами обоих счетчггков, делителя частоты и счетчика Джонсона.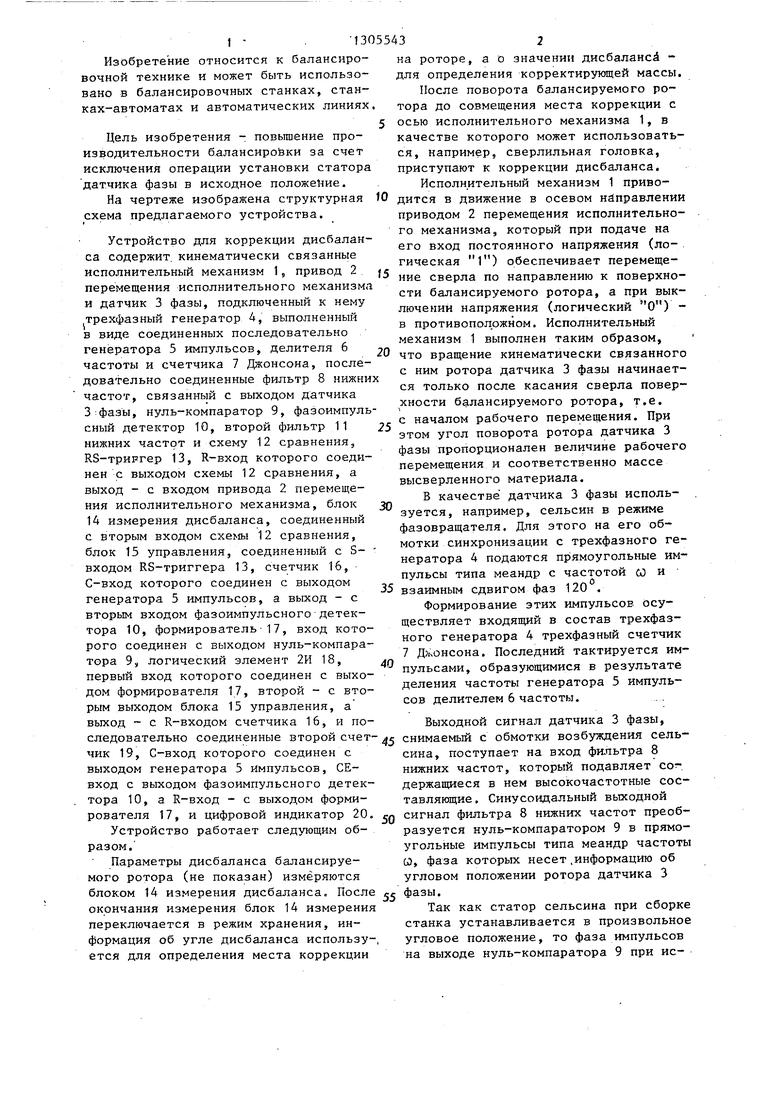

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции дисбаланса | 1985 |
|
SU1259121A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Устройство для статической балансировки роторов | 1984 |
|
SU1186980A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
Изобретение относится к балансировочной технике. Целью изобретения- является повышение производительности балансировки за счет исключения опера:ции установки статора датчика фазы в исходное положение. Выходной сигнал датчика 3 фазы через фильтр 8 нижних частот, нуль-компаратор 9, фазоимпульсный детектор 10 и второй фильтр 11 нижних частот поступает на первый вход схемы 12 сравнения, второй вход которой соединен с блоком 14 измерения дисбаланса. На второй вход фазоимпульсного детектора 10 поступает сигнал с первого счетчика 16. Сигнал с выхода схемы 12 сравнения через RS-триггер 13, связанный с блоком 15 управления, поступает на вход привода 2 перемещения исполнительного механизма 1, кинематически связанного с датчиком 3 фазы, вращение которого начинается только после касания инструментом 1 поверхности балансируемого изделия. Цифровой индикатор 20, соединенный с выходом второго счетчика 19, обеспечивает получение информации о рабочем перемещении исполнительного механизма. 1 ил. I (Л с

| Авторское свидетельство СССР № 1177706, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1259121A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
