Изобретение относится к спасательным средствам, а именно к индивидуальным спасательным средствам, при- меняемым для спасения людей при пожарах в высотных зданиях, а также как средство передвижения.сверху вниз строителей, монтажников, горноспа- - сателей и т.п.
Цель изобретения - повьпаение надежности работы поглотителя энергии за счет упрощения его конструкции.
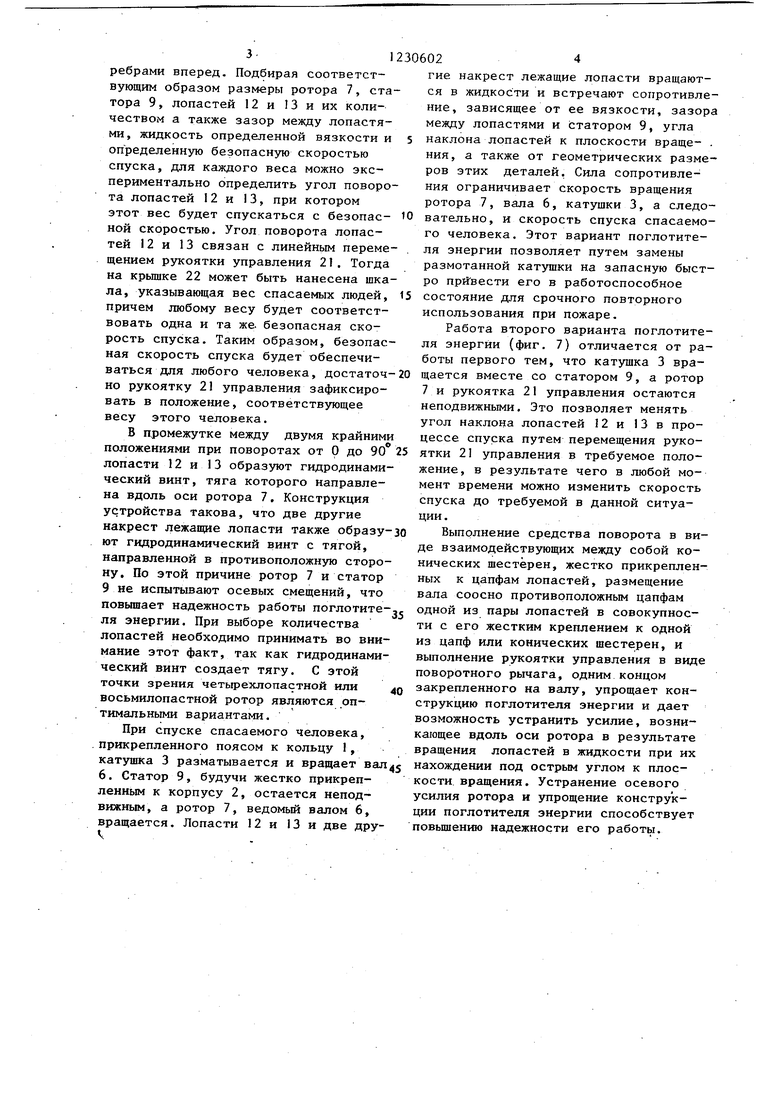
На фиг. 1 представлен первый вариант поглотителя энергии со cтaциo- нарной катушкой, фронтальный разрез; на фиг. 2 - то же, разрез А-А на фиг. 1; на фиг. 3 - то же, вид справа; на фиг. 4 - то де, вид справа без детали 18; на фиг, 5 - детали 17 и 19, аксонометрический вид; на
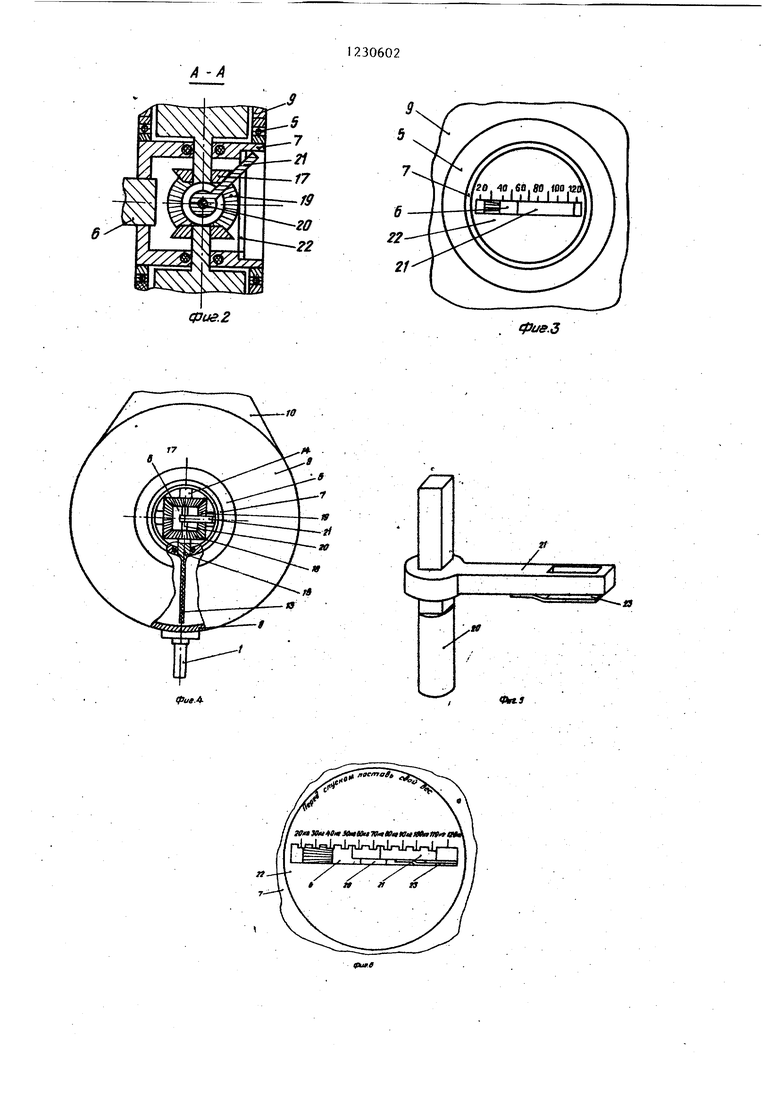
фиг. 6 - то же, увеличенный вид сира- 20 тором и шкалой для рукоятки 21 управ- ва; на фиг. 7 - второй вариант погло- ления. Внутренняя полость статора 9 тителя энергии, фронтальный разрез; на фиг. 8 - первый вариант поглотителя энергии с быстросъемной катушкой,
25
фронтальный разрез,
Устройство включает кольцо 1 для крепления спасательного пояса, корпус 2, катушку 3, подшипники 4 и 5, вал 6, ротор 7, канат 8, статор 9,
залита вязкой жидкостью.
Во втором варианте поглотителя энергии (фиг, 7) катушка 3 вьтолнена как составная часть статора 9,
Работа первого варианта поглотителя энергии. При спуске рукоятку 21 управления устанавливают в положение, соответствующее весу спасаемого чело-
защитную крьш1ку 10, втулку 11, лопас- зо века. В соответствии с перемещением ти 12 и 13, цапфы 14 и 15, уплотни- рукоятки 21 управления, жестко сое- тельные кольца 16, конические шестерни 17, 18 и 19, вал 20, рукоятку 21
диненной с валом 20, последний начинает вращаться и своей верхней ча тью, имеющей квадратное сечение, поуправления, крьппку 22, пружину 23, крьшку 24,
Первый вариант поглотителя энергии . Кольцо 1 жестко прикреплено к корпусу 2. Катушка 3 на подшипниках 4 размещена в корпусе 2. Ъал 6 может быть выполнен как одно целое с катушкой 3 и иметь квадратное поперечное сечение в месте контакта с ротором 7 (фиг. 1), либо отдельно от катушки (фиг, 8). На катушку 3 намотан канат в. Статор 9 жестко прикреплен к корпусу 2, имеющему защитную крьш1ку 10 с втулкой I1. Ротор 7 выполнен в виде пустотелого цилиндра и размещен в статоре 9 на герметизированных подшипниках 5. С левой стороны ротор 7 имеет квадратное отверстие для размещения вала 6. Ротор 7 связан с лопастями 12 и 13 посредством цапф 14 и 15, проходящих через радиальные отверстия ротора 7. Цап4н 1 14 и 15 загерметизированы в роторе 7 посредством уплотнительных колец 16, На цапфах I4 и 15 жестко посажены коничес
кие шестерни 17 и 18, входящие в зацепление с шестерней 19. Цапфы 14 и 15 в осевом направлении имеют отверстия для размещения вала 20, который
сверху вьтолнен квадратным в поперечном сечении, а снизу - круглым. Поперечные сечения отверстий в цапфах 14 и 15 аналогичны поперечным сечениям двух сторон вала 20, Рукоятка
21 управления жестко прикреплена к валу 20. При двухлопастном роторе необходимость в конических шестернях отпадает. В этом случае вал 20 с обеих сторон выполняется квадратного
поперечного сечения так, чтобы при поворо те рукоятки управления 21 цапфы 14 и 15 и лопасти 12 и 13 одновременно поворачивались на один и тот же угол. Крьшша 22 служит фиксатором и шкалой для рукоятки 21 управ- ления. Внутренняя полость статора 9
залита вязкой жидкостью.
Во втором варианте поглотителя энергии (фиг, 7) катушка 3 вьтолнена как составная часть статора 9,
Работа первого варианта поглотителя энергии. При спуске рукоятку 21 управления устанавливают в положение соответствующее весу спасаемого чело-
века. В соответствии с перемещением рукоятки 21 управления, жестко сое-
диненной с валом 20, последний начинает вращаться и своей верхней частью, имеющей квадратное сечение, поворачивает вокруг оси цапфу 14, а следовательно, и лопасть 12, Цапфа 14, будучи жестко соединенной с конической шестерней 17, поворачивает ее. На фиг. 1-8 представлены варианты
устройства с четырьмя лопастями, однако число лопастей может быть и
другим. Четыре конические шестерни, находясь в постоянном зацеплении друг с другом, поворачиваются на один и тот же угол. На этот же угол поворачиваются четыре цапфы и четыре лопасти. При перемещении рукоятки 21 управления в крайнее правое положение (фиг. 2, 3, 4, 6) лопасти принимают
положение, перпендикулярное плоскос
ти вращения, и по этой причине тормозной эффект будет максимальным, nph перемещении рукоятки 21 управления в крайнее левое положение вал 20, а также все цапфы и лопасти поворачиваются на 90 в положение, при котором т6рмоз.ной эффект минимален, так как лопасти двигаются в жидкости
ребрами вперед. Подбирая соответствующим образом размеры ротора 7, статора 9, лопастей 12 и 13 и их количеством а также зазор между лопастями, жидкость определенной вязкости и определенную безопасную скоростью спуска, для каждого веса можно экспериментально определить угол поворота лопастей 12 и 13, при котором этот вес будет спускаться с безопас- ной скоростью. Угол поворота лопастей 12 и 13 связан с линейным перемещением рукоятки управления 21. Тогда на крьшке 22 может быть нанесена шкала, указывающая вес спасаемых людей, причем любому весу будет соответствовать одна и та же безопасная скорость спуска. Таким образом, безопасная скорость спуска будет обеспечиваться для любого человека, достаточно рукоятку 21 управления зафиксировать в положение, соответствующее весу этого человека.
В промежутке между двумя крайними положениями при поворотах от О до 90 лопасти 12 и 13 образуют гидродинамический винт, тяга которого направлена вдоль оси ротора 7. Конструкция устройства такова, что две другие накрест лежащие лопасти также образуют гидродинамический винт с тягой, направленной в противоположную сторону. По этой причине ротор 7 и статор 9 не испытывают осевых смещений, что повышает надежность работы поглотителя энергии. При выборе количества лопастей необходимо принимать во внимание этот факт, так как гидродинамический винт создает тягу. С этой точки зрения четьфехлопастной или восьмилопастной ротор являются оптимальными вариантами.
При спуске спасаемого человека, прикрепленного поясом к кольцу 1, катушка 3 разматывается и вращает вал 6. Статор 9, будучи жестко прикрепленным к корпусу 2, остается неподвижным, а ротор 7, ведомый валом 6, вращается. Лопасти 12 и 13 и две дру- V
гие накрест лежащие лопасти вращаются в жидкости и встречают сопротивление, зависящее от ее вязкости, зазор между лопастями и статором 9, угла наклона лопастей к плоскости враще- ния, а также от геометрических размеров этих деталей. Сила сопротивления ограничивает скорость вращения ротора 7, вала 6, катушки 3, а следовательно, и скорость спуска спасаемого человека. Этот вариант поглотителя энергии позволяет путем замены размотанной катушки на запасную быстро прй вести его в работоспособное состояние для срочного повторного использования при пожаре.
Работа второго варианта поглотителя энергии (фиг. 7) отличается от работы первого тем, что катушка 3 вращается вместе со статором 9, а ротор 7 и рукоятка 21 управления остаются неподвижными. Это позволяет менять угол наклона лопастей 12 и 13 в процессе спуска путем перемещения рукоятки 21 управления в требуемое положение, в результате чего в любой момент времени можно изменить скорость спуска до требуемой в данной ситуации.
Выполнение средства поворота в виде взаимодействующих между собой конических шестерен, жестко прикрепленных к цапфам лопастей, размещение вала соосно противоположным цапфам одной из пары лопастей в совокупности с его жестким креплением к одной из цапф или конических шестерен, и выполнение рукоятки управления в виде поворотного рычага, одним концом закрепленного на валу, упрощает конструкцию поглотителя энергии и дает возможность устранить усилие, возникающее вдоль оси ротора в результате вращения лопастей в жидкости при их нахождении под острым углом к плоскости вращения. Устранение осевого усилия ротора и упрощение конструкции поглотителя энергии способствует повьш1ению надежности его работы.
cpus.2
фие.З
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2223125C1 |
| Устройство для спуска с высотных объектов | 1981 |
|
SU978875A1 |
| Устройство для спуска с высотных объектов | 1980 |
|
SU931192A1 |
| УСТРОЙСТВО ДЛЯ ГРАВИТАЦИОННОГО СПУСКА ЛЮДЕЙ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ | 2001 |
|
RU2209099C1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2604252C2 |
| Гидроагрегат для использования энергии текучей среды | 1989 |
|
SU1828939A1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2603812C2 |
| Устройство для эвакуации людей из зданий при пожаре | 1981 |
|
SU967487A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА С ВЫСОТЫ | 2012 |
|
RU2509583C1 |
| Спасательное устройство | 1979 |
|
SU919680A1 |

ta
фив.
ГУ
«К5
Редактор М, Товтин
Составитель Е. Илюхин
Техред Г.Гербер Корректор Е. Рошко
Заказ 2473/7 Тираж 431 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,,Раушская наб., д. 4/5
.-™™%вв «.-«в.И.в. ей™. Ч,в-.«и в «ж -i ее М «-«
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.
| Патент США № 4042079, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
