Изобретение относится к строительству, в частности к устройствам для погружения свай вдавливанием в грунт,- и может быть использовано преимущественно для работы в водона- сыщенных грунтах.
Цель изобретения - повышение производительности устройства.
На фиг. 1 изображено устройство для погружения свай, разрез, его пневматическая схема.
Устройство для погружения свай в водонасьпценные грунты состоит из опоры 1, которая образует открытую снизу вакуум-камеру 2. На верхнем торце опоры 1 установлен захват 3, который имеет возможность взаимодействия со .сваей 4, пропущенной через отверстие в вакуум-камере 2. Пневматическая схема устройства включает пневмо- насос 5, клапаны 6, 7 и 8 с дистанционным управлением, на которые подается с пульта 9 управления управляющий сигнал, камеру-ресивер 10, соединенную через пневмораспределитель 11 с пневмонасосом 5, и регистраторы 12, 13 и 14 давления.
Устройство работает следукицим образом.
На подготовленную площадку устанавливают вакуум-камеру 2 и в сквозное отверстие в ней с помощью грузоподъемного механизма (на чертеже не показан) устанавливают сваю 4. Посредством захвата 3 сваю 4 соединяют с опорой 1. Затем включают пневмонасос 5 и с пульта 9 управления подают сигнал на пневмораспределитель 11 и клапан 6. По этому сигналу золотник пневмораспределителя 11 перемещается влево и соединяет всасывающую магистраль пневмонасоса 5 с камерой-ресивером 10, а клапан 6 открывается и соединяет нагнетающую магистраль пневмонасоса 5 с атмосферой (клапаны 7 и 8 при этом закрыты) . Пневмонасос 5 откачивает воздух из камеры-рейивера 10 и создает в ней разрежение, величина которого контролируется регистратором 13 давления. При достижении максимального вакуума в камере 10, степень которого определяется технической характеристикой пневмонас.оса 5, работающего на данном этапе в режиме вакуум-насоса, с пульта 9 управления подают сигнал на открытие клапана 8, При открытии клапана 8 каме- ря -ресивер 10 соединяется с вакуум1231142
камерой 2, Воздух по пневмопроводу, соединяющему эти две камеры, устремляется в зону более низкого давле30
ния, т.е. в камеру-ресивер 10. Под
5 действием атмосферного давления на опору 1 вакуум-камера 2 резко norfjy- жается в грунт. Величина погружения вакуум-камеры 2 в грунт определяется из условия равенства вдавливающей
10 силы, определяемой как произведение величины избыточного атмосферного давления на площадь контакта открыто- го конца вакуум-камеры 2 с грунтом, и силы сопротивления грунта внедреf5 нию в него сваи 4 и кромок опоры 1. Так как опора 1 через захват 3 связана со сваей 4, то последняя также погрузится в грунт (внедрение сваи в грунт будет носить характер дина20 мического удара). Через незначительный промежуток времени, когда показания регистраторов 12 и 13 давления станут одинаковыми, с пульта 9 управления подают сигнал на закры25 тие клапана 8 и продолжают откачку воздуха из камеры-ресивера 10 до достижения максимального вакуума. Затем опять открывают клапан 8 и тем самым создают следующий удар по свае 4, которая погружается в грунт под его действием еще на некоторую величину. Периодическое открытие и закрытие клапана 8 продолжают до тех пор, пока показания регистраторов 12 и 13 давления не будут близки к той максимальной степени разрежения, которую может создавать пневмонасос 5 по своей технической характеристике. После окончания погружения сваи 4 клапан 8 перекрывают и открывают клапан 7, который соединяет вакуум-камеру 2 через открытый клапан 6 с атмосферой. Когда регистратор 12 давления покажет отсутствие вакуума в камере 2, сигналом с пульта 9 управле 5 ния клапан 6 закрывают, а золотник пневмораспределителя 11 переводят вправо и он занимает положение, как показано на чертеже. Золотник пневмораспределителя 11 запирает камеру50 ресивер 10 и соединяет всасывающую магистраль пневмонасоса 5 с атмосфе- рой, а Нагнетающая магистраль пневмонасоса 5 оказывается соединенной через клапан 7 с вакуум-камерой 2.Пнев55 монасос 5,. работающий на данном этапе в. режиме компрессора, создает в вакуум-камере 2 избыточное давление, величина которого контролируется pe-t
35
40
ния, т.е. в камеру-ресивер 10. Под
действием атмосферного давления на опору 1 вакуум-камера 2 резко norfjy- жается в грунт. Величина погружения вакуум-камеры 2 в грунт определяется из условия равенства вдавливающей
силы, определяемой как произведение величины избыточного атмосферного давления на площадь контакта открыто- го конца вакуум-камеры 2 с грунтом, и силы сопротивления грунта внедрению в него сваи 4 и кромок опоры 1. Так как опора 1 через захват 3 связана со сваей 4, то последняя также погрузится в грунт (внедрение сваи в грунт будет носить характер динамического удара). Через незначительный промежуток времени, когда показания регистраторов 12 и 13 давления станут одинаковыми, с пульта 9 управления подают сигнал на закрытие клапана 8 и продолжают откачку воздуха из камеры-ресивера 10 до достижения максимального вакуума. Затем опять открывают клапан 8 и тем самым создают следующий удар по свае 4, которая погружается в грунт под его действием еще на некоторую величину. Периодическое открытие и закрытие клапана 8 продолжают до тех пор, пока показания регистраторов 12 и 13 давления не будут близки к той максимальной степени разрежения, которую может создавать пневмонасос 5 по своей технической характеристике. После окончания погружения сваи 4 клапан 8 перекрывают и открывают клапан 7, который соединяет вакуум-камеру 2 через открытый клапан 6 с атмосферой. Когда регистратор 12 давления покажет отсутствие вакуума в камере 2, сигналом с пульта 9 управления клапан 6 закрывают, а золотник пневмораспределителя 11 переводят вправо и он занимает положение, как показано на чертеже. Золотник пневмораспределителя 11 запирает камеруресивер 10 и соединяет всасывающую магистраль пневмонасоса 5 с атмосфе- рой, а Нагнетающая магистраль пневмонасоса 5 оказывается соединенной через клапан 7 с вакуум-камерой 2.Пневмонасос 5,. работающий на данном этапе в. режиме компрессора, создает в вакуум-камере 2 избыточное давление, величина которого контролируется pe-t
31231
гистратором 14 давления. На вакуум- камеру 2 действует выталкивающая сила, определяемая как произведение разности между избыточным давлением в вакуум-камере 2 и атмосферным на j площадь торца опоры 1. Под действием выталкивающей силы вакуум-камера 2 выходит из грунта на поверхность, а захват 3 при этом скользит вдоль сваи 4, не взаимодействуя с ней. Пос-(0 ле выхода вакуум-камеры 2 на поверхность грунта свая 4 остается в нем.
1424
Затем цикл повторяют сначала до тех
пор, пока ьвая 4 не погрузится на проектную глубину.
Предложенное устройство для погружения свай позволяет увеличить производительность при работе в водона- сыщеннык грунтах за счет создания динамического воздействия на погружаемую сваю, которое обеспечивается установкой камеры-ресивера, периодически соединяемой либо с пневмонасосом, либо с вакуум-камерой.
11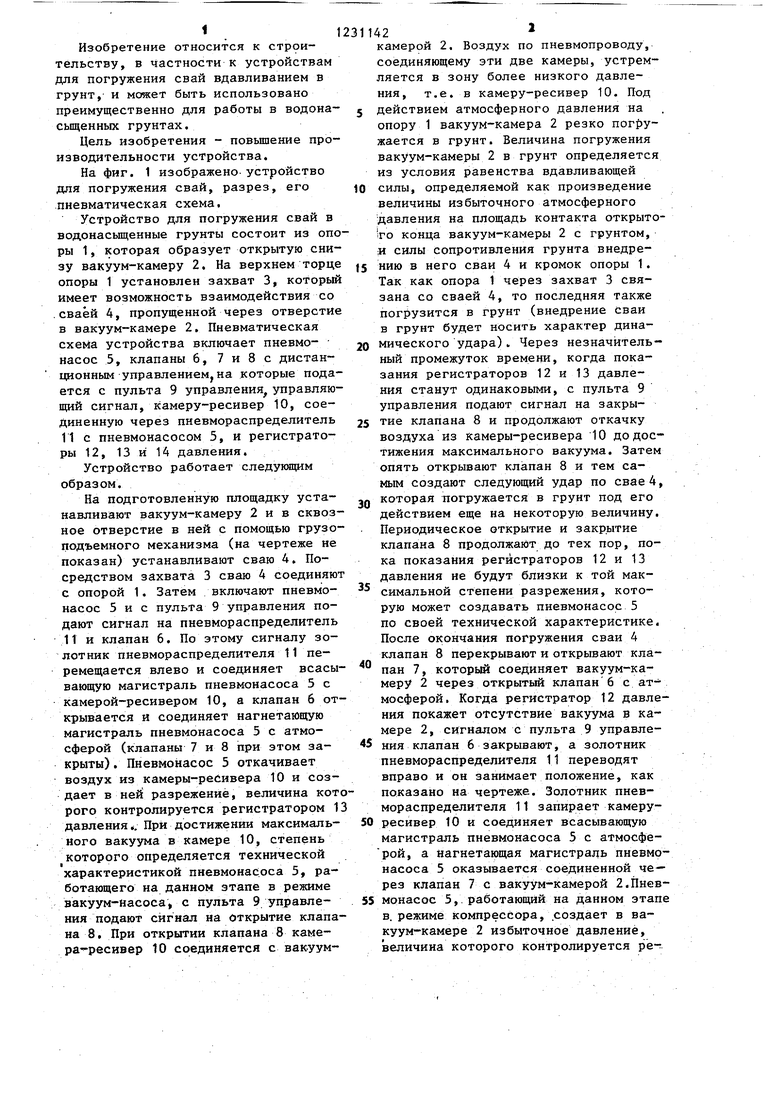
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОГРУЖЕНИЯ В ГРУНТ ВАКУУМНОГО АНКЕРА | 1992 |
|
RU2017894C1 |
| Устройство для погружения анкеров вдавливанием | 1985 |
|
SU1409728A1 |
| Устройство для образования скважин и нагнетания в грунт раствора | 1987 |
|
SU1513087A2 |
| Тормозная система транспортного средства | 1980 |
|
SU1044508A1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРУЖИН СЖАТИЯ | 1997 |
|
RU2138794C1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461841A1 |
| Устройство для образования скважин и нагнетания в грунт раствора | 1985 |
|
SU1310478A1 |
| Устройство для подъема и запирания на тягаче складывающегося дышла прицепа-роспуска | 1980 |
|
SU982944A1 |
| Устройство для разрушения горных пород | 1984 |
|
SU1167315A1 |
| Установка для испытания образцовНА СТАТичЕСКиЕ и диНАМичЕСКиЕНАгРузКи | 1977 |
|
SU830188A1 |
Составитель А.Холстов Редактор М.Дылын Техред В. Кадар Корректор Е.
Заказ 2544/34 Тираж 641Подписное
ВНИШ1Й Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.
| ВСССОЮЗИлЯП ДТ- '- Ч^*]- |?г| I i,:^, tsa | 0 |
|
SU372320A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для погружения свай вдавливанием | 1979 |
|
SU1036841A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для погружения свай вдавливанием | 1975 |
|
SU591550A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
