Из()б)етеиие относитс н к ce. ibCKOMX зяйству н может испо.тьзовап ся: iipii автоматизации Ефоцессов растениеводства.
Целью изобретения яв;1иется liOBbiineifne |Ч)чпоети вождения ведомого агрегата.
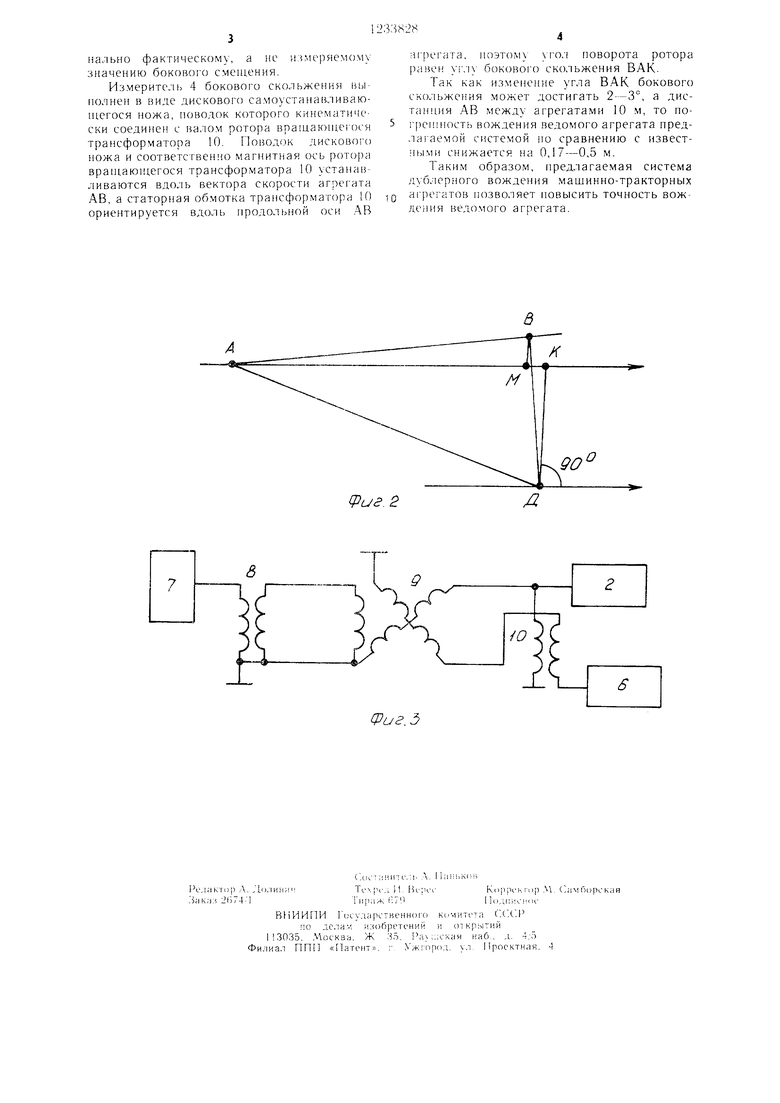
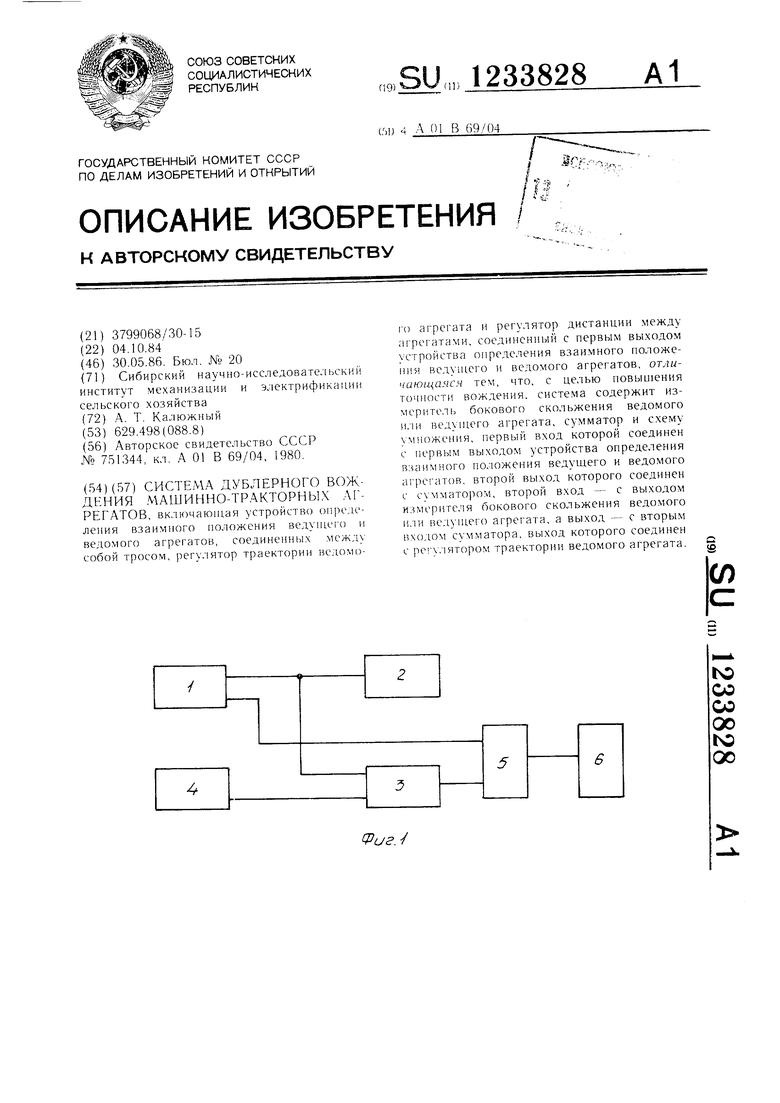
На фи1 . I приведена стоуктурная схема систем,; на фиг. 2геометри1 еские построения; на фи1 3 :);1ектрическая схемг одного из вариантов систе 1ы.
С.истема содержит (фи1 1) уст)ойст.,о 1 {)(|(Н теде11ия взаимного положения () и ведомого ai peraTon. г)егу;1Я ор 2 дистанции, с.хс му 3 умножения, из 1ери;те, :1, 4 боково о ско, ведомого и,:1И ведущего аг нм ата, сумматор 5 и ре1 улято) ( траектории ведо а1 регата.
Устройство 1 оиредедеиия взаимного ио. южеиня ведуи1е1 о и iK UJMoro агоегатои имеет два вы.хода. 1е)В1)1Й устройства ог1)едедеиия в;5аимпог() ио. южс ния веду1нег(1 и ведо.мого агрегатов сос-динен со BXO;IOM км-улятора 2 дистанции и с одним из нходо , схемы 3 ум11ожения. )й вход ехемы умноже1 ия соединен с выходом измсритс;1я 4 ooKOiioro скол1 жения р.сдупим о илн гимомого аг регатов. В1)1ход схемы 3 умножения и второй В1)1ход уетройетва I онреде.ения взаим- ИО1-О иоложения ведущего и ведомого гатон соединен) со }хода.ми еуммато)а Г. сумматора 5 сосди 1е с iходом jiei-y- 6 т)аектор и .
(ли тема работает с, ;еду Цим образом
, 1ро ;Ор1и5Онал. д станции между а регатами, с iepiiO o )1ход.:: устройства I онределс ия 5заимно о но. ) и ведомся о )егата ост 1ает а 1ход;о ре улятора 2 i; схсм 3 . На торой вход схем 3 с «,,хода змер)ителу, 4 ско, анряжение, (,.10е . МСЖДУ iC-K1 O )
скорости и родо. ОСЬЮ ведомо -о a -;v; - ата. 11роизгк те 1е а 1ряже ий с х)да схем) ,3 посту 1ас1- на ixo;i, су. 5, (а гго)ой 1ход кото)ого
1а |5ЯЖе 1Ие со п.ХОДа
и к домо1 о ), 1)о
ОрЦИО1 а, боК(.му СМе.еНИ(). С iblXO
л,а cyMMaTopja Ь сумма ход)х . К)сту ае 1 а ход .лято)а ( граек о И ;1 ведомслч) . . суммат())а о ,0 факти ич кгс .г ; ачени 5 боково Ч) ., что обесли. чивает бо. высокую т(}м 1ость и) едомо о 1)едла1-ае ой системоГ; Ведом 1 Й а -регаг А дв жется вдо/л. К К- тора с орости .ЛК, к ре: ,ул 1 ате (;ак гическог значе 1 - е бокового с мете и я оавио отрез у ДК. 11од действием тяг( :)кс им1т;)исите :: 1 родол Л ая ось АВ ведомо Ч) ai-pKnaTr. отк.л;; 1яется от вектора скорос1Л а .:i В.ЛК. Велич1 1 а этого угла можег дости ать 2 3. Устройство 1 .1яег Г)оковое .ic как расстоя ие между )одол1, ocbic
зедомо Ч) ЛВ { меегом ) агрегата Д, т. с. как от)сзок БД. Измеряемое ,о1ч с. ВД о мичается пт (рак ич(Ч кого ДК ма еличицу ВМ, которая 1)оизвсден() ли1 та нии ЛИ и;: vr.ia АК. Нац;), I po(,()С Д 1 1 И , (ТСЯ С ус ;-11ойства ; о рсделсчия ii3a -MiiO l) 1ОЛОЖе Я НСДУПиЛ О И 1еДОМО1 (1
а; ;)е а ГО. )яжеиие, црг). Л);()е СИЛУ.-у Vi.a ВАК, е)1ается с ;П)Х)да 4 б(;лО)(: cк(),. -) }1анря- Ж(л:чя f a схемг) 3 , no /roMv а его и,1Х1;де lipoЛI;;))aЛ)(J отрезку ВЛА. )( 3,ЧИ Га1.--Л Я ()рОМ П Х Н.
) vr();) |1)хода устройства 1.
;|рОНОр ЛО а. о ЗМС П СМОМУ 1Иач1Н к1О
noKOBO 4j .; ВД. |Л)э 1ому В :Хо;:--ое лапря: с ие л , iecKOviy бокозомх .cHiiio ,.К 11;л1ряжс1 ;е. )Д(е хода ryvr viaropa 3 на вхо i ). 1: ( и(мол;О о ата, не соде) с(. Став,Я) ;н,сй, (U i тмом ВАК. -тл обесчеM i5ac более 3bii;iK J 5 ОЧНОеТ ;
(; а ре а а
о ег:раиед; вг) н i елх чае, сели и :. Л агрегат. 5 :. К
Se..0%4i Но Ир1 JTOM И ЗМ С : ЧТС. , 1 боКО(1:Ч; CK().l j/ U H4H ( ДО.1Ж(Л1 ЧЛ а Ч i В, 1 1
i т. ... т. t на им ч ;см аг илате.
-ч;- )1 1() ча (. 3. . чройсля; I
(Ч ;Н-Ле- Ч :Я ( НО.ЧОЖСиЧЯ (у
а зедо.( а )ега ;ов состочч i ; г(ч:сра rojv; 7
ГерС VC ) аЧрЯЖеНИЯ. / ИЧ ЧЧ;; ; .Л:- ii Ciin-K;) 9 Pa Ha К): ii Ч С Я
( :орма горо). ,.лiiiieiiHijiii гра К {| ( oi: 8 измер е ; мгжа:лнч ат;;о1 ) .АД
1:(IMO,-1 1 ОЧК( Й , )1, Ча ;Я лой лП ЖДХ arfiei a . )( jp 9 . синхч: и косич с а К/, {. (ла Ч) обмо ка (i) гора 9 соел,Л1еиа
с рОТОр ОЙ О6МОГК(}Й T Kl C(b(Jp М а I Ора 15,
:;п-/ Ч) )1е на р ;жсл:ия i ia i|ni/Ki ii-
;;Ор;Л:0 :а;,Н , )е.( аТГ;0 -; г : ч. М,i:or:i 1 )е Ч), : .. л г; .ая ,:}.,ц
1 Ч П ,ЧЧ()- лОСЧ Т J1 а НС(р(;р : а Г: ; а10.
испо. ( Н изм; ри1Ч ле 4 6(;KniUJ O С чол ,, (чк я 1оследо а 1 е. л,1-1 :
|ч;кЛ : ЧЧ()Й обмОГЬО Тра КЧ}К)) У1 ;Г1 О;1 а 9. Ч1О
оГнч НС и и 15 а С : pea laraio ма ev;a л1;й )ai.Hn () сс ач ;я/Ч;, I lacм;);-к;., .-ф(,1а ора () :.оедач;|:а iDiia I e. ii)io . об(;т;..;;)и i ;ia;:C;:4;p- lia opa 9, ч: ., .;6i. ;чи чи зае г реа. :ЛтК) (Ч КОГ: i) С р а ;.; ) ВЬ ЧЧ:аЧ 1Я , MI1 . llX 1 а1;рЯ/Ке ИЙ. Пл -; Т( ма ;; ;:
/кение, :ост на i(), per , );;,; , TpacK i O.i; i зелч)М )i o а р1; :;ла. i Л Ч Ч Л Оna;ibHO фактическому, a не измеряемому значению бокогюго смен1ения.
Измеритель 4 бокового екольжения гюлнен в виде диекового еамоустана1 ливаю- цегоея ножа, поводок которого кинематиче- еки соединен с валом ротора вращающегося трансформатора 10. Поводок дискового ножа и соответственно магнитная ось ротора вра1цаюн1,егося трансформатора 10 устанавливаются вдоль вектора скорости агрегата АВ, а статорная обмотка трансформатора 10 ориентируется вдоль нродольной оси АВ
;и-регата, ноэтомч угол поворота ротора laBCH угл бокового ско,1ьження ВАК.
Так как изменение угла ВАК бокового скольжения может достигать 2-3°, а дис- АВ между агрегатами 10 м, то по- грен1ность вождения ведомого агрегата предлагаемой системой но сравнению с известными снижается на 0,17-0,5 м.
Таким образом, предлагаемая система яуб;1ерного вождения машинно-тракторных а|-регатов позволяет повысить точность вож- дения ведо.мого агпегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительная муфта-патрон | 1986 |
|
SU1371843A1 |
| Установка для резки железобетона | 1985 |
|
SU1318418A1 |
| Линия для изготовления профилированных минераловатных изделий | 1986 |
|
SU1380958A1 |
| Устройство для ввода и вывода информации | 1986 |
|
SU1392552A1 |
| Автоматическая система направления подбирающего рабочего органа на ленту льна | 1984 |
|
SU1233827A1 |
| Транспортный холодильный агрегат | 1988 |
|
SU1525035A1 |
| Устройство для останова обмоточного станка при обрыве нити | 1981 |
|
SU1000368A1 |
| Устройство для уборки покрытий | 1984 |
|
SU1234502A1 |
| Устройство для встроенного контроля логических блоков | 1986 |
|
SU1392569A1 |
| Агрегат для выемки крутых пластов угля | 1980 |
|
SU941610A1 |
(Риг. 2
Фиг. 5
| Устройство для автоматического группового вождения тракторных агрегатов | 1978 |
|
SU751344A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
