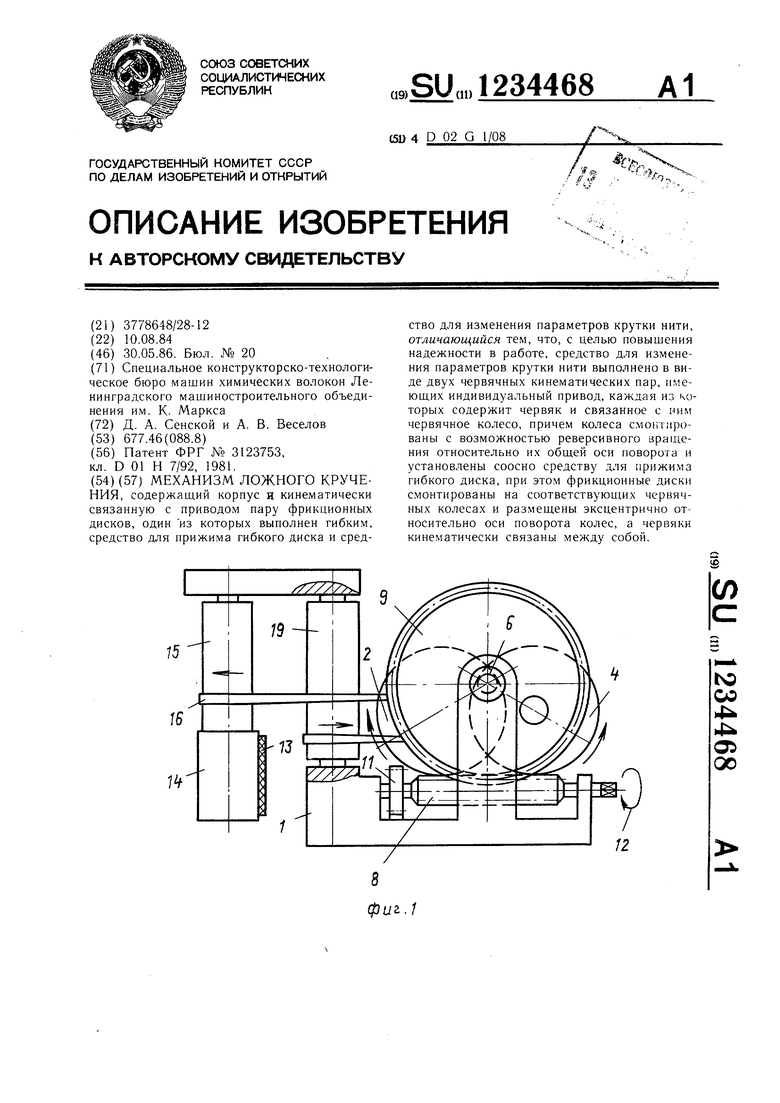
фиг.1
Изобретение относится к производству химических волокон, а именно к механизмам ложного кручения синтетических нитей.
Цель изобретения - повышение надежности работы механизма.
На фиг. I изображен механизм ложного кручения для Z-крутки; на фиг. 2 - то же, вид сверху; на фиг. 3 -- схема крутки нити в механизме на фиг. 1; на фиг. 4 - механизм ложного кручения для S-крутки; на фиг. 5 - схема крутки нити в механизме на фиг. 4; на фиг. 6 - механизм ложного кручении для Z-крутки с верхним расположением дисков; на фиг. 7 - схема крутки нити в механизме на фиг. 6; на фиг. 8 - устройство для изменения параметров крутки нити.
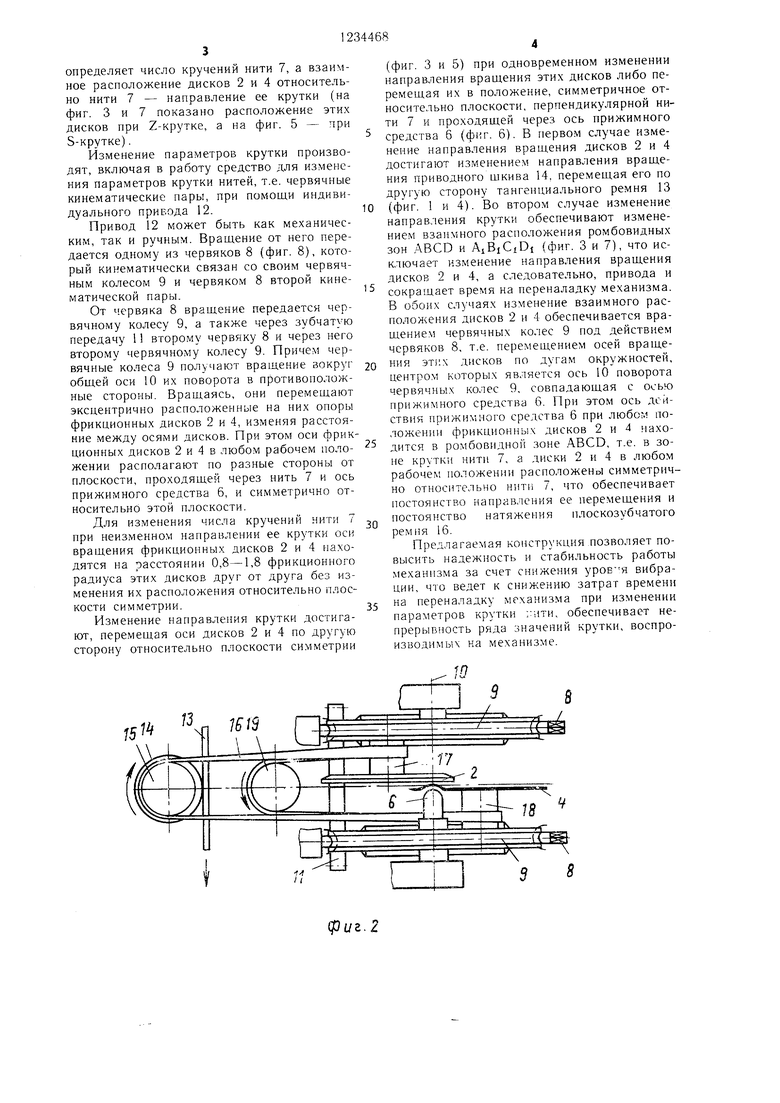
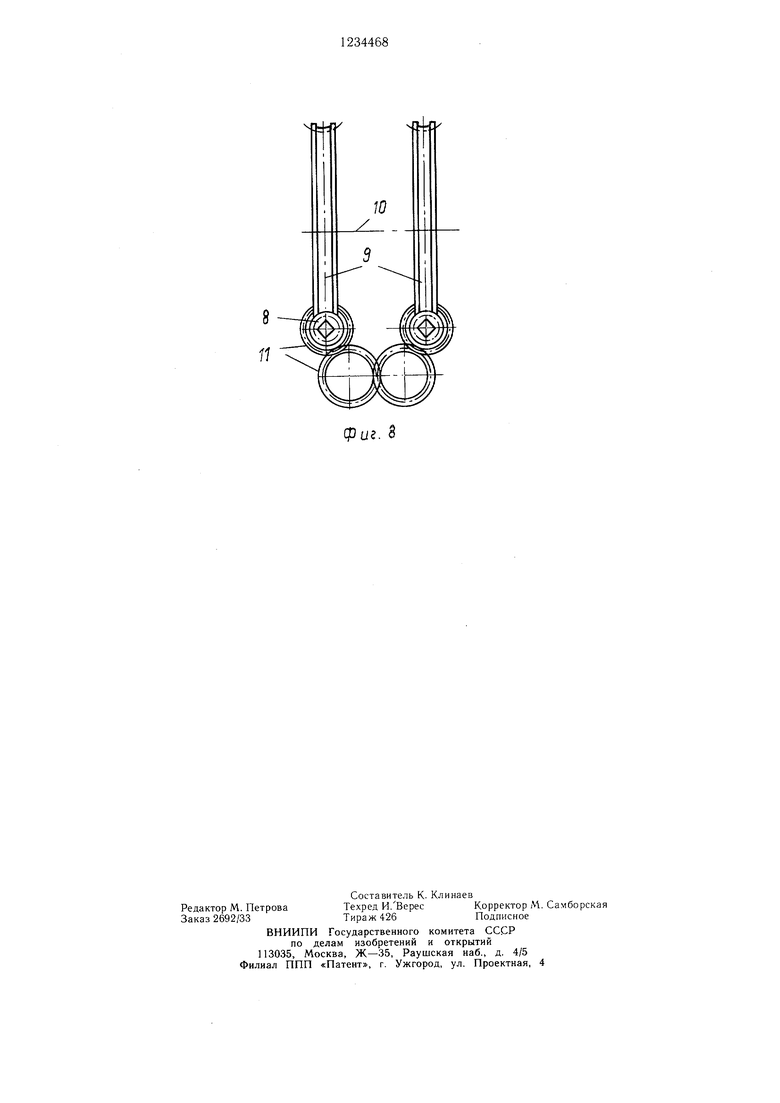
Механизм ложного кручения, расположенный Б корпусе 1 (фиг. ),содержит жесткий фрикционный диск 2 (фиг. 1, 2, 4 и 6) с фрикционной кольцевой поверхностью 3 (фиг. 3, 5 и 7), гибкий фрикционный диск 4 (фиг. 1, 2, 4 и 6) с фрикционной кольцевой новерхностью 5 (фиг. 3, 5 и 7), средство 6 (фиг. 1-7) для прижима гибкого диска 4 и средство для изменения параметров крутки нити 7 (фиг. 3, 5 и 7), выполненное в виде двух червячных кинематических пар, каждая из которых содержит червяк 8 (фиг. 1, 2, 4, 6 и 8) и червячное колесо 9 (фиг. 1, 2, 4, 6 и 8), смонтированные с возможностью реверсивного вращения. При этом червячные колеса 9 установлены соосно средству 6 для прижима гибкого диска 4, фрикционные диски 2 и 4 смонтированы на колесах 9 и размещены эксцентрично относительной общей оси 10 поворота (фиг. 2 и 8) колес 9, а червяки 8 кинематически связаны между собой зубчатой передачей II (фиг. 1, 2 и 8) и с индивидуальным приводо.м 12 (фиг. I). Привод механизма ложного кручения осуществлен от тангенциального ремня 13 (фиг. 1, 2, 4 и 6) через приводной щкив 14 (фиг. 1, 2, 4 и 6), ведущий щкнв 15 посредством плоскозубчатого ремня 16, онетли- вающего ведомые щкивы 17 (фиг. 2) и 18 (фиг. 2) и натяжной щкив 19 (фиг. 1,2,4 и 6). При этом оси вра1цения ведомь1х шкивов 17 и 18 параллельны между собой к скрещиваются под прямым углом с осью вращения приводного 14 и ведущего 15 щкивов, а направление их вращения противоположно Патяжение плоскозубчатого ремня 16 н стабильность его формы обеспечивается опетливаемым им натяжным щкивом 19, опора которого подпружинена (не показано) и смонтирована в корпусе 1 механизма, а ось вращения параллельна оси приводного 14 и ведущего 15 LHKHBOB. Ве.аомые щкивы 17 и 18 расположены соосно своим фрикционным дискам (жеского 2 и гибкого 4 соответственно) и соединены с ними, а оси вращения дисков 2 и 4 расположены в одной плоскости, перпендикулярной оси при
0
0
5
0
5
0
5
водного шкива 14, и в рабочем положении находятся на расстоянии 0,8-1,8 фрикционного радиуса дисков друг от друга, что обеспечивает необходимые значения крутки. При этом внутренние торцы дисков 2 и 4 параллельны и образуют между собой зазор, через который проходит скручиваемая нить.
Механизм работает следующим образом.
Сначала приводят во вращение приводной шкив 14 (фиг. 1, 2, 4 и 6) путем контакта с одной из сторон поступательно движу- П1егося в неизменном направлении бесконечного тангенциального ремня 13. Приводной шкив 14 связан с соосно с ним располо- женным ведущим щкивом 15 и вращается синхронно с ним в общих опорах (не показано), смонтированных в корпусе 1. Вращаясь, ведущий щкив 15 передает движение онетливающему его плоскозубчато.му бесконечному ремню 16, имеюи;ему пространственную конфигурацию в виде четырех взаимосвязанных нетель (фиг. 1 и 2), попарно параллельных между собой. При своем движении зубчатый ремень 16 приводит во вра- |ценио пару ведомых щкивов 17 и 18 и вместе с н ими фрикционные диски 2 и 4.
Затем в зазор между врандающимися дисками 2 и 4 вводят нить 7 и включают в работу прижимное средство 6, которое воздействует на внеп:нюю сторону гибкого диска 4 (фиг. 2). При этом гибкий диск 4 изгибается в двух плоскостях: плоскости, гфохо.чящей через нить 7 параллельно осям вращения дисков 2 и 4,и плоскости, перпендикулярной нити 7 и проходящей через ось прижимного средства 6.
Деформируясь, гибкий диск 4 кольцевой фрикционной поверхностью 5 воздействует на нить 7 в направлении жесткого диска 2 с кольцевой фрикционной поверхностью 3, благодаря чему происходит защемление нити 7 между фрикционными поверхностями 3 и 5.
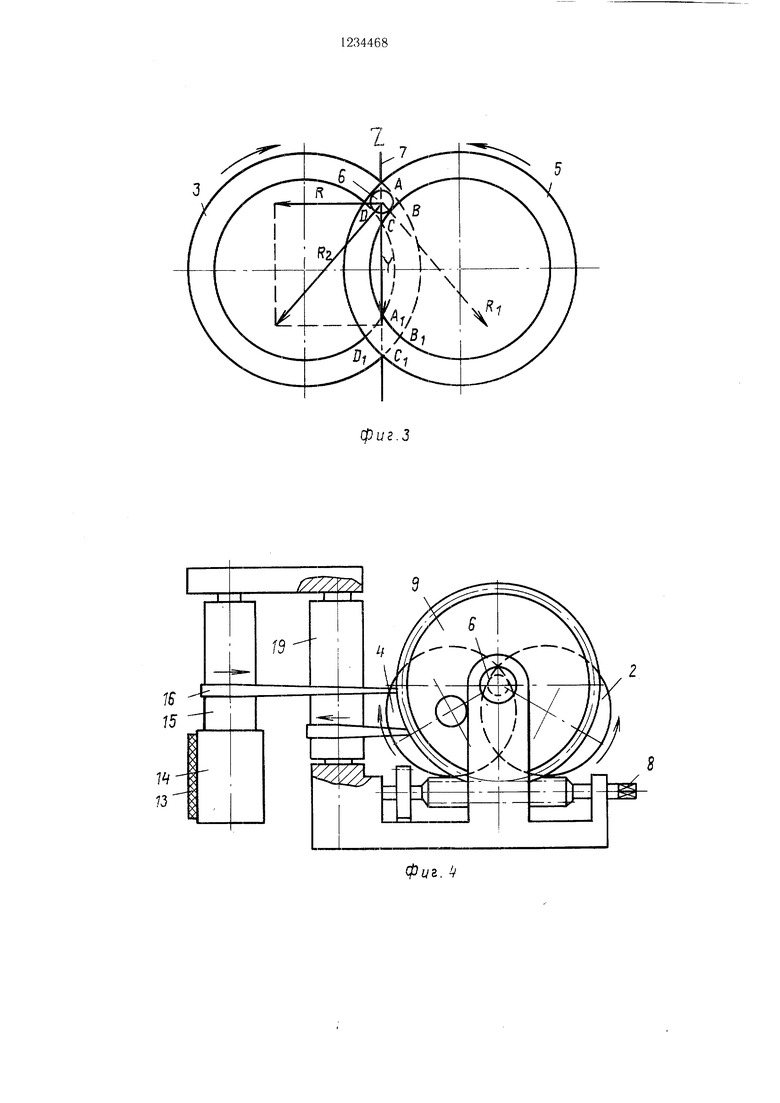
Кольцевые фрикционные поверхности 3 и 5 благодаря заданному расстоянию между осями врапдения дисков образуют две зоны перекрытия ромбовидной формы - ABCD и Aj BjCiDi (фиг. 3), в центре первой из которых воздействует описанны.м образо.м при- жнмное средство 6, изгибая диск 4 и защемляя пить 7 между фрикционными поверхностями 3 и 5. Причем фрикционная поверхность 3 воздействует на нить 7 в направле- -гии RI (фиг. 3) перпендикулярно своему фрикционному радиусу, а фрикционная поверхность 5 аналогично воздействует в направлении Нд с другой стороны нити. Таким образом нить 7 получает вращение с одновременным осевым перемещением в направлении Y благодаря разложению векторов скорости RJ и Rj фрикционных поверхностей 3 и 5 на составляющие кручения (R) и перемещения (У), как показано на фиг. 3. При этом cooTHOHJCHne величин R/Y
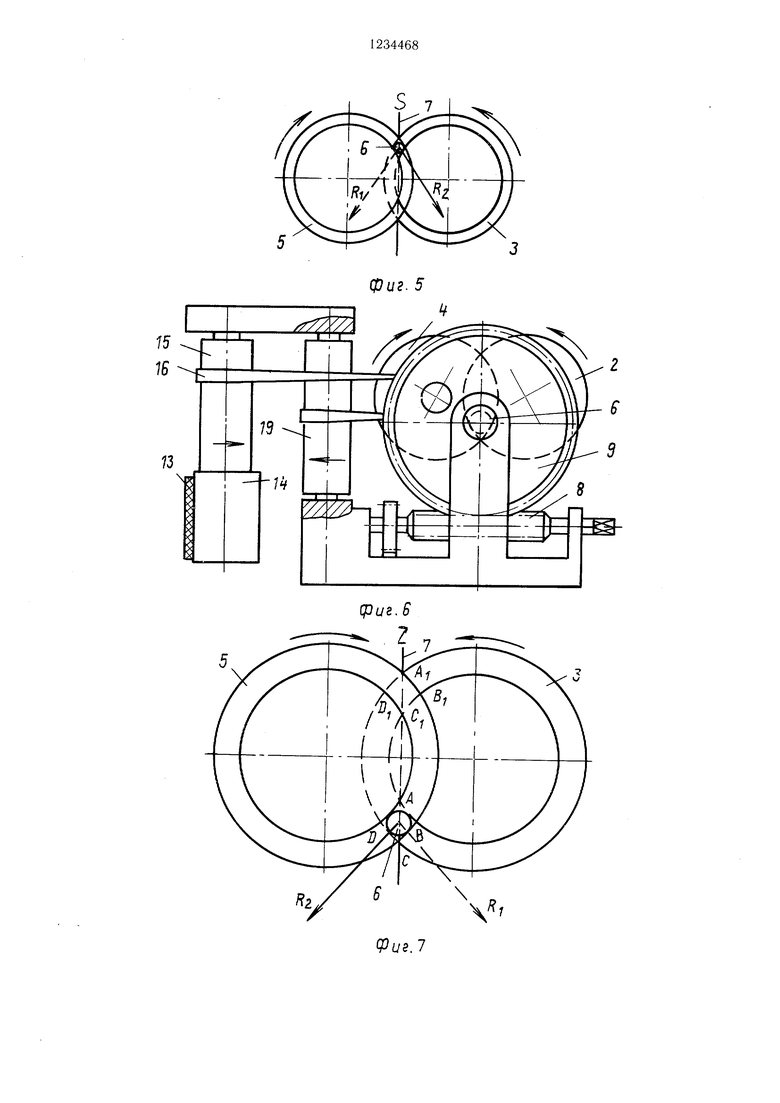
определяет число кручений нити 7, а взаимное расиоложение дисков 2 и 4 относительно нити 7 - направление ее крутки (на фиг. 3 и 7 показано расположение этих дисков при Z-крутке, а на фиг. 5 - при S-крутке).
Изменение параметров крутки производят, включая в работу средство для изменения параметров крутки нитей, т.е. червячпые кинематические пары, при помощи ипдиви- дуального привода 12.
Привод 12 может быть как механическим, так и ручным. Враш,ение от него передается одному из червяков 8 (фиг. 8), который кинематически связан со своим червячным колесом 9 и червяком 8 второй кинематической пары.
От червяка 8 вращение передается червячному колесу 9, а также через зубчатую передачу 11 второму червяку 8 и через него второму червячному колесу 9. Причем чер(фиг. 3 и 5) при одновременном изменении направления вращения этих дисков либо перемещая их в положение, симметричное относительно плоскости, перпендикулярной нити 7 и проходящей через ось прижимного средства 6 (фиг. 6). В первом случае изменение направления вращения дисков 2 и 4 достигают изменением направления вращения приводного щкива 14, перемещая его по другую сторону тангенциального ремня 13 (фиг. 1 и 4). Во втором случае изменение направления крутки обеспечивают изменением взаимного расположения ромбовидных зон ABCD и AjBiCiDt (фиг. 3 и 7), что исключает изменение направления вращения дисков 2 и 4, а следовательно, привода и сокращает время на переналадку механизма. В обоих случаях изменение взаимного расположения дисков 2 и 4 обеспечивается вращением червячных колес 9 под действием червяков 8, т.е. перемещением осей враще10
15
вячные колеса 9 получают вращение вокруг 20 этих дисков по дугам окружностей.
общей оси 10 их поворота в противоположные стороны. Вращаясь, они перемещают эксцентрично расположенные на них опоры фрикционных дисков 2 и 4, изменяя расстояние между осями дисков. При этом оси фрикцентром которых является ось 10 поворота червячных колес 9, совпадающая с осью прижимного средства 6. При этом ось действия прижимного средства 6 при любом положении фрикционных дисков 2 и 4 нахо30
ционных дисков 2 и 4 в любом рабочем поло- дится в ромбовидной зоне ABCD, т.е. в зо- жении располагают по разные стороны от плоскости, проходящей через нить 7 и ось прижимного средства 6, и симметрично относительно этой плоскости.
Для изменения числа кручений нити 7 при неизменном направлении ее крутки оси вращения фрикционных дисков 2 и 4 находятся на расстоянии 0,8-1,8 фрикционного радиуса этих дисков друг от друга без изменения их расположения относительно плоскости симметрии.
Изменение направления крутки достигают, перемещая оси дисков 2 и 4 по другую сторону относительно плоскости симметрии
35
не крутки нити /, а диски 2 и 4 в любом рабочем положении расположены симметрично относительно нити 7, что обеспечивает постоянство направления ее перемещения и постоянство натяжения плоскозубчатого ремня 16.
Предлагаемая конструкция позволяет повысить надежность и стабильность работы механизма за счет снижения уров я вибрации, что ведет к снижению затрат времени на переналадку механизма при изменении параметров крутки ;:ити, обеспечивает непрерывность ряда значений крутки, воспроизводимых на механизме.
(фиг. 3 и 5) при одновременном изменении направления вращения этих дисков либо перемещая их в положение, симметричное относительно плоскости, перпендикулярной нити 7 и проходящей через ось прижимного средства 6 (фиг. 6). В первом случае изменение направления вращения дисков 2 и 4 достигают изменением направления вращения приводного щкива 14, перемещая его по другую сторону тангенциального ремня 13 (фиг. 1 и 4). Во втором случае изменение направления крутки обеспечивают изменением взаимного расположения ромбовидных зон ABCD и AjBiCiDt (фиг. 3 и 7), что исключает изменение направления вращения дисков 2 и 4, а следовательно, привода и сокращает время на переналадку механизма. В обоих случаях изменение взаимного расположения дисков 2 и 4 обеспечивается вращением червячных колес 9 под действием червяков 8, т.е. перемещением осей враще
этих дисков по дугам окружностей.
центром которых является ось 10 поворота червячных колес 9, совпадающая с осью прижимного средства 6. При этом ось действия прижимного средства 6 при любом положении фрикционных дисков 2 и 4 находится в ромбовидной зоне ABCD, т.е. в зо-
дится в ромбовидной зоне ABCD, т.е. в зо-
не крутки нити /, а диски 2 и 4 в любом рабочем положении расположены симметрично относительно нити 7, что обеспечивает постоянство направления ее перемещения и постоянство натяжения плоскозубчатого ремня 16.
Предлагаемая конструкция позволяет повысить надежность и стабильность работы механизма за счет снижения уров я вибрации, что ведет к снижению затрат времени на переналадку механизма при изменении параметров крутки ;:ити, обеспечивает непрерывность ряда значений крутки, воспроизводимых на механизме.
(fluz.2
фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм ложного кручения | 1984 |
|
SU1189902A1 |
| Веретено для двукратной крутки | 1938 |
|
SU59458A1 |
| Устройство для ложного кручения непрерывно движущихся нитей | 1988 |
|
SU1652391A1 |
| Рука манипулятора | 1983 |
|
SU1269992A1 |
| Устройство для ложной крутки непрерывно движущихся нитей | 1982 |
|
SU1108153A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СИЛЫ НАТЯЖЕНИЯ ДВИЖУЩЕЙСЯ НИТИ ПОЗАДИ ВЬЮРКА ФРИКЦИОННОГО ТИПА МАШИНЫ ДЛЯ РАТИНИРОВАНИЯ ТКАНИ | 1991 |
|
RU2092633C1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Швейный полуавтомат для изготовления ложного канта на деталях одежды | 1980 |
|
SU992626A1 |
| Устройство для получения пряжи | 1981 |
|
SU996547A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU365072A1 |
Фиг.
фиг. 5
(Pus.7
goue. 3
| Патент ФРГ № 3123753, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
