Изобретение относится к машиностроению, к средствам автоматизации сборочных производственных процессов.
Известна рука манипулятора, содержащая скалку, связанную с приводами осевого перемещения и вращения, размещенную в корпусе на двух опорах, выполненных в виде соосно расположенных основных направляющих осевого перемещения, закрепленных с возможностью вращения, и элементы управления перемещением руки.
Однако известное устройство имеет малую надежность точечного контакта зубьев приводной щестерни с зубьями рейки.
Целью изобретения является повыщение надежности конструкции.
Цель достигается тем, что в руке манипулятора, содержащего скалку, связанную с приводами осевого перемещения и вращения, размещенную в корпусе на двух опорах, выполненных в виде соосно расположенных основных направляющих осевого перемещения, закрепленных с возможностью вращения, и элементы управления перемещением руки, скалка выполнена в виде червяка с дополнительными продольными направляющими осевого перемещения, имеющими возможность взаимодействия с основными направляющими, закрепленными с возможностью качания относительно корпуса, при этом скалка кинематически связана с приводом осевого перемещения посредством дополнительно введенного червячного колеса, образующего с червяком передачу.
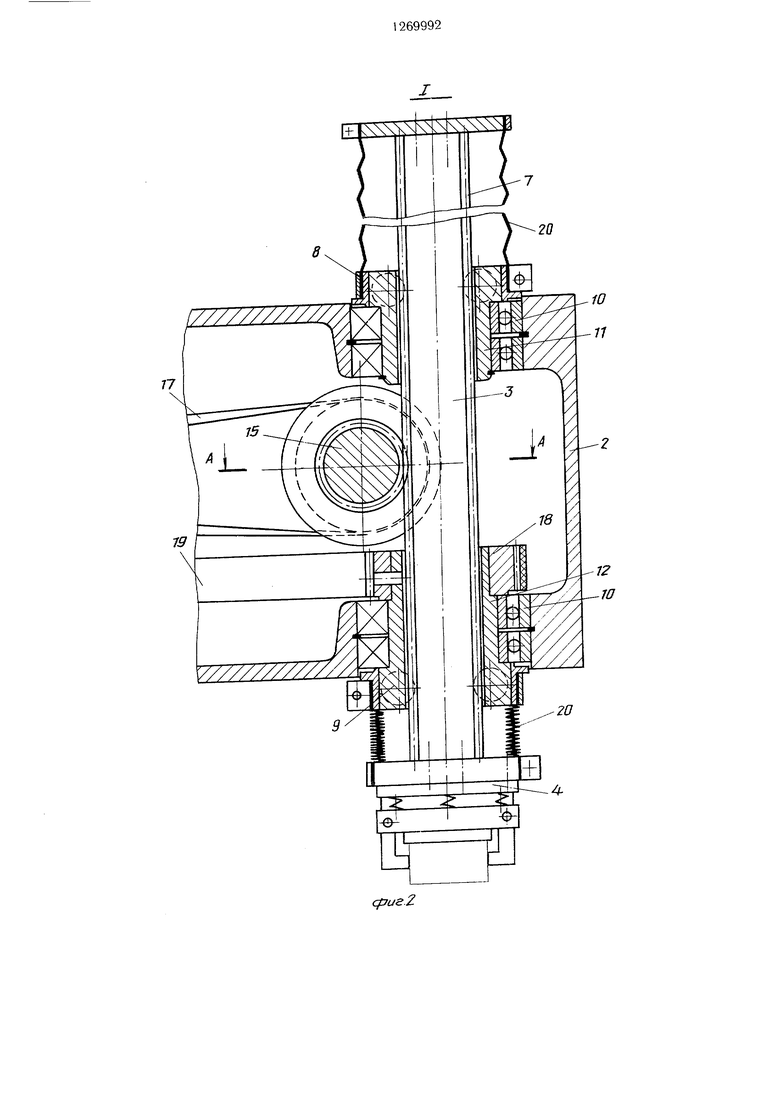
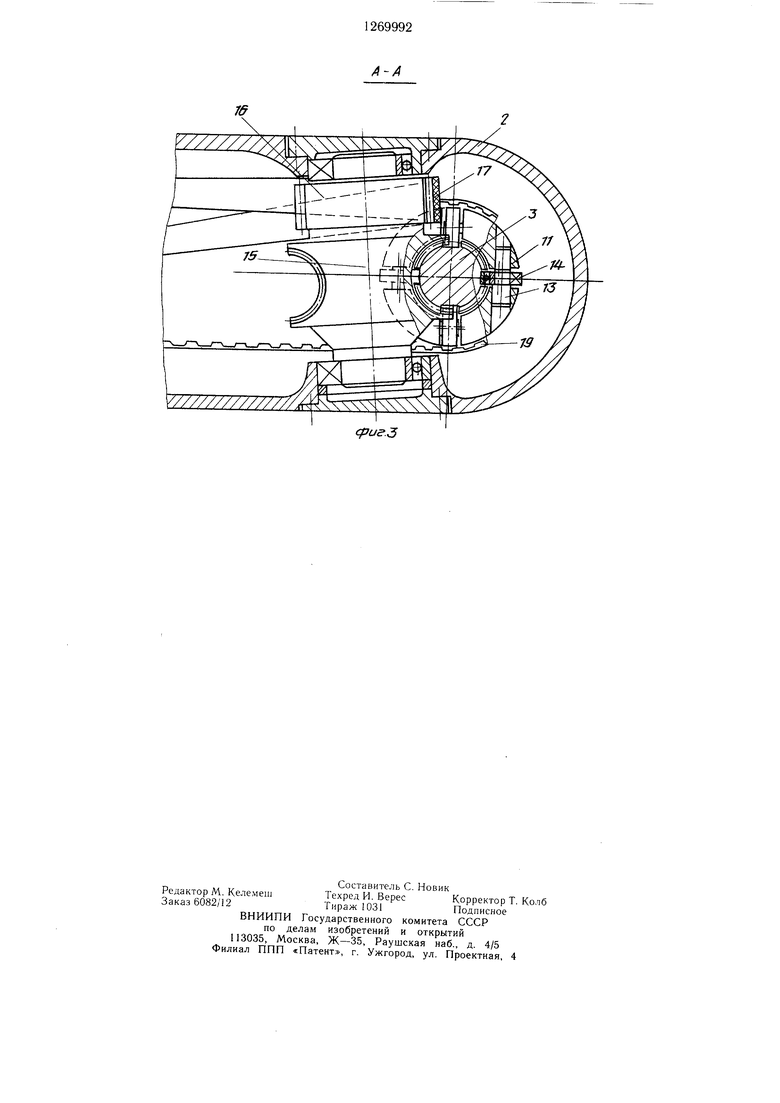
На фиг. 1 изображена рука манипулятора, вид сбоку; на фиг. 2 - узел I на фиг. 1, разрез; на фиг. 3 - сечение А--А на фиг. 2.
На основании закреплена рука 2, выполненная из двух сочлененных частей (основных направляющих), и скалка 3, размеще;;ная в корпусе руки 2, с закрепленным на скалке 3 схватом 4. На основании размещены приводы 5 и 6 осевого аереме це ия и вращения скалки 3 и элементы управления приводами 5, б (не показано).
Скалка 3 выполнена в виде червяка и имеет дополнительные продольнь е направлягощие 7. Скалка 3 расположена в двух опорах 8 и 9, закрепленных в корпусе руки 2 в осевом направлении с возможностью вращепия в подпшпниках 10. Опоры 8 и 9 представляют собой втулки 11 и 12с установленными в них на осях 13 подшипников 14, являюн1имися направ.ляющими качания для скалки 3.
Скалка 3 взаимодействует с червячны.м колесом 15, сидящим на одном валу,
закрепленном в корпусе руки 2, со щкивом 16. Шкив 16 связан с приводом 5 осевого перемещения скалки 3 плоскозубчатым ремнем 17. На втулке 12 опоры 9 закреплен щкив 18, связанный с приводом 6 вращения плоскозубчатым ремнем 19. Скалка 3 защищена эластичными элементами 20.
Цриводы 5 и 6 снабжены датчиками 21 обратной связи.
Рука манипулятора работает следующим образом.
Из произвольного положения рука 2 выводится в позицию загрузки, обеспечивая позиционирование вертикальной оси схвата
4специальными приводами, размещенными на основании 1 (не показаны).
Для осевого перемещения схвата 4 в соответствии с программой включается привод
5осевого перемещения и через плоскозубчатый ремень 17, шкив 16 и червячное колесо 15 передается движение на скалку 3, которая своими направляющими плоскостями перемещается в направляющих подщипниках 14 опор 8 и 9.
При осуществлении осевого перемещения привод 6 вращения скалки 3 работает в режиме отработки нуля, что обеспечивает отсутствие вращения схвата 4.
Для вращения схвата 4 осуществляется согласованное вращение приводов 5 и 6. При этом от привода 6 вращения через плоскозубчатый ремень 19 и шкив 18 движение передается на опору 9, которая, вращаясь совместно с опорой 8 в корпусе руки в подшипниках 10, поворачивает подшипниками 14 скалку 3 со схватом 4. Отсутствие осевого перемещения скалки 3 обеспечивается благодаря принудительному вращению червячного колеса от привода 5 осевого перемещения с частотой вращения, определяемой из соотношения Пчсф.ко.:|.пчерв. i, где пчсрнкол и Пчерв. - соответственно числа оборотов червячного колеса 15 и червяка., а i - передаточное отношение червячной передачи.
Путем согласованного вращения приводов 5 и 6 осевого перемещения и вращения, управляемых элементами управления по программе, можно получать различные винтообразные перемещения скалки 3 со схватом 4 с любым наперед заданным шагом винтовой линии.
Применение предлагаемой конструкции руки повышает ее долговечность, технологичность и точность позиционирования, так как скалка 3 перемещается в подшипниках, обеспечивает переход от точечного контакта зубьев приводных колес к линейному.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм ложного кручения | 1984 |
|
SU1234468A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Промышленный робот | 1988 |
|
SU1768380A1 |
| Шпиндельная бабка токарного многоцелевого станка | 1990 |
|
SU1792807A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
РУКА МАНИПУЛЯТОРА, содержащая скалку, связанную с приводами осевого перемещения и вращения, размещенную в корпусе на двух опорах, выполненных в виде соосно расположенных основных направляющих осевого перемещения, закрепленных с возможностью вращения, и элементы управления перемещением руки, отличающаяся тем, что, с целью повыщения надежности, скалка выполнена в виде червяка с дополнительными продольными направляющ,ими осевого перемещения, имеющими возможность взаимодействия с основными направляющими, закрепленными с возможностью качания относительно корпуса, при этом скалка кинематически связана с приводом осевого перемещения посредством дополнительно введенного червячного колеса, образующего с червяком передачу.
| Рука манипулятора | 1981 |
|
SU979102A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
