Изобретение относится к испытаниям транспортник средств, а именно П1ИН оггорпых катков гусенич})ых машин.
Цель изобретения - приближение условий испытания к реальным путем повышения точности измерения и поддержания действующей на-шину радиальной нагрузкИр
На фиг. 1 показан стенд для испытания шин опорных катков гусеничных машин, кинематическая схема; на фиг 2 - то же, вид сверху; на фиг.3 схематично показаны силы, действующие на шину опорного катка при работе стенда
. Стенд состоит из станины 1, бегового барабана 2 с покрытием в виде гусеничной ленты 3 и установленными на ней неровностями для имитации до- рожных препятствий (не показаны), привода враш;ения барабана (не показан) и узла установки и нагружения шины 4,. который состоит из механизма .5 нагружеНия, торсиона 6 и датчиков 7 и 8 угловых перемещений. Торсион 6 имеет на одном конце рычаг 9 для связи с механизмом 5 .нагружения, а на другом конце - балансир 10 с осью 11 для установки опорного катка 12 с шиной 13. Один из датчиков 7 угловых перемещений кинематически соединен через узел 14 связи с осью поворота рычага 9, а другой датчик 8 через узел 15 связи соединен с осью поворота балансира Ю. Выходы датчиков 7 и 8 соединены с входом вычислительного устройства 16. В качестве вьгчислительного устройства может быть взята Электроника-60 (микро- ЭВМ) . Узел 14 связи состоит из редуктора 17 и муфты 19, а узел 15 связи - из редуктора 18 и муфты 20. Узлы 14 и 15 связи могут иметь и другое конструктивное.исполнение. В качестве датчиков угловых перемещений могут быть использованы, например, бесконтактные сельсины. Выход вьгчислительного устройства 16 соединен с узлом отображения и регистрации информации (не показан).
.Стенд работает следующим образом. Опорный каток 12 с шиной 13 закрепляют на оси 11 узла установки и нагружения шины 4 и с помощью привода приводят во вращение беговой барабан 2. Механизм 5 нагружения при подаче рабочей среды в его поршневую полость поворачивает рычаг 9, осу-
ществляя подвод катка 12 с шиной 13 к .беговому барабану 2 с покрытием в виде гусеничной ленты 3, после чего закручивает торсион 6, производя тем самым посредством балансира 10 наг- ружение шины 13.
В результате этого на шину 13 катка 12 действует радиальная нагрузка
R Nacosy + G, + F, где N
величина усилия, которое развивает узел установки и нагружения шины при закрутке торсиона;
5 Y - угол поворота балансира относительно горизонтального положения;
G - вес катка с шиной; Fg - сила, возникающая вследствие 0 влияния веса балансира на
шину катка.
При качении катка 12 по звеньям гусеничной ленты 3 и неровностям, которые могут быть установлены на 5 беговом барабане 2, изменяется угол J поворота балансира 10 и соответственно меняется угол закрутки торсиона 6, что влечет за собой изменение величины радиальной нагрузки R, дей- 0 ствующей на шину 13 катка 12.
Поскольку датчики 7 и 8 угловых перемещений соединены с рычагом 9 и балансиром 10, то при повороте рычага 9 через редуктор 17 и муфту 19 5 поворачивается датчик 7, а при повороте балансира 10 tiepe3 редуктор 18 и муфту 20 поворачивается датчик 8.
При этом датчиком 7 измеряется угол поворота рычага 9, а датчиком 0 8 -.угол у поворота балансира 10, причем угол J поворота балансира 10 отсчитывается относительно горизонтального положения, а угол jb поворота рычага 9 - относительно положения, 5 которое обеспечивает в момент подвода шины 13 катка 12 к беговому барабану 2 равенство измеренного значения угла р поворота рычага 9 измеренному значению угла у поворота балан- 0 сира 10.
Измеренные значения углов у и /J с датчиков 7 и 8 поступают в вычислительное устройство 16.
Вычислительное устройство 16, ис- 55 пользуя предварительно найденные и хранящиеся в его памяти функциональную зависимость усилия, которое развивает узел установки и на1 ружения
ШИНЫ 4, от угла закрутки торсиона 6, величину веса катка 12 с шиной 13, значение поправки, учитывающей влияние веса б гпансира Ю на шину 13 и алгоритм вычисления угла закрутки торсиона 6 и величины радиальной нагрузки, действующей на шину 13 катка 12, вычисляет величину радиальной нагрузки, действукидую в данный момент на шину 13.
Алгоритм вычисления угла закрутки торсиона 6 и величины радиальной нагрузки, действующей на шину 13 катка 12 имеет следуюищй вид ( -у- /
f
R N((y;cosy - G + g.
где oi - вычисленное значение угла
закрутки торсиона; If - измеренное значение упа поворота балансираj Э - измеренное значение угла поворота рычага-,
R - вычисленное значение радиалной нагрузки;
N(a) - функциональная зависимость усилия, которое развивает узел установки и нагружения шины от угла закрутки торсиона-,
G - вес катка с шиной; g - значение поправки, учитывающей влияние веса балансира на шину катка.
Вычисленные значения величины радиальной нагрузки с выхода вычислительного устройства 16 поступают на узел отображения и регистрации информации .
В случае необходимости, например при смене торсиона и балансира, производится корректировка хранящихся в памяти вычислительного устройства функциональной зависимости N(«;) и значения поправки g.
При смене катка корректируется . лишь величина С,.
Функциональная зависимость N(o6) может быть представлена в виде уравнения параболической регрессии, которое определяется по результатам
10
Т5
20
5
0
5
0
5
тарировки узля устяновки и нагружения шины.
Стенд позволяет измерять и регистрировать в процессе испытаний как действующую величину радиальной Hai- рузки на шине катка, так -и ее пиковые значения, например при качении катка по неровностям, уставновленным на беговом барабане. При этом на стенде могут быть установлены гусеничная лента, торсион и балансир, соответствующие конкретному типу гусеничной машины, что в значительной мере приближает условия испытания к реальным условиям эксплуатации. В свою очередь, постоянная информация о величине радиальной нагрузки на шине катка дает возможность повысить точность управления величиной радиальной нагрузки, например, при ее стабилизации или изменении по к акому- либо периодическому закону.
Формула изобретения
Стенд для испытания шин опорных катков гусеничных машин, включающий станину, за крепленные на ней беговой барабан с покрытием в виде гусеничной ленты, привод вращения барабана и узел установки и нагружения шины, содержащий механизм нагружения, связанный при помощи рычага с торсионом, на другом конце которого закреплен балансир с осью для установки испытываемого опорного катка с шиной, отличающийся тем, что, с целью приближения условий испытания к реальным путем повышения точности измерения и поддержания действукнцей на шину радиальной нагрузки, узел установки и нагружения шины снабжен датчиками угловых перемещений, один из которьсх кинематически связан с осью поворота рычага торсиона, а другой - с осью поворота балансира, при этом датчиков соединены с входом вычислительного устройства, а выход вычислительного устройства соединен с узлом отображения и регистрации информации.
(риг.2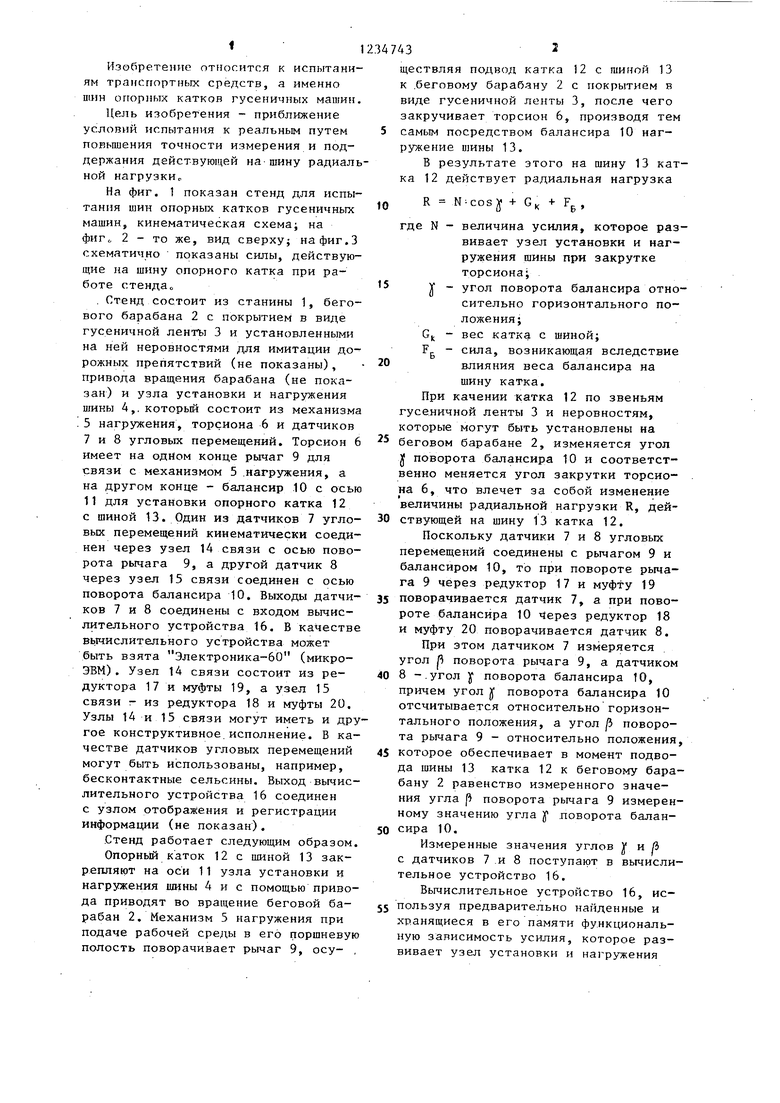

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания шин катков гусеничных машин | 1979 |
|
SU887977A1 |
| Стенд для испытаний гусеничного движителя | 1989 |
|
SU1705719A1 |
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
| Стенд для испытания деталей ходовой части гусеничных машин | 1978 |
|
SU767606A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765584C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2767459C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765318C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765511C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765581C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765582C1 |

Изобретение относится к стендам для испытания шин опорных катков гусеничных машин. Цель изобретения - приближение условий испытания к реальным путем повышения точности измерения и поддержания действующей на шину радиальной нагрузки, Беговой барабан вьтолнен с покрытием в виде ленты с установленными на ней неровностями для имитации дорожных препятствий. Один из датчиков 7 угловых перемещений кинематически соединен через узел связи 14 с осью поворота рычага 9, а датчик 8 через узел связи 15 соединен с осью поворота балансира 10 о Выходы датчиков соединены с входом вычислительного устройства 16. При качении катка 12 по звеньям гусеничной ленты и неровностям изменяется угол у поворота балансира 10 и соответственно меняется угол закрутки торсиона 6, что влечет за собой изменение величины радиальной нагрузки, действукнцей на шину катка. 3 ил. i (Л 13 СО 4 -ч 4 СО
Редактор Л.Повхан
Заказ 2978/47
Тираж 778 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открьггий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.З
Составитель А.Гуляев
Техред М.Ходанич Корректор М.Максимишинец
| 1971 |
|
SU421904A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для испытания шин катков гусеничных машин | 1979 |
|
SU887977A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
