Изобретение относится к автоматике и контрольно-измерительной техни-. ке и может быть использовано в измерительных системах для многоканальной регистрации информации.
Целью изобретения является повышение быстродействия устройства.
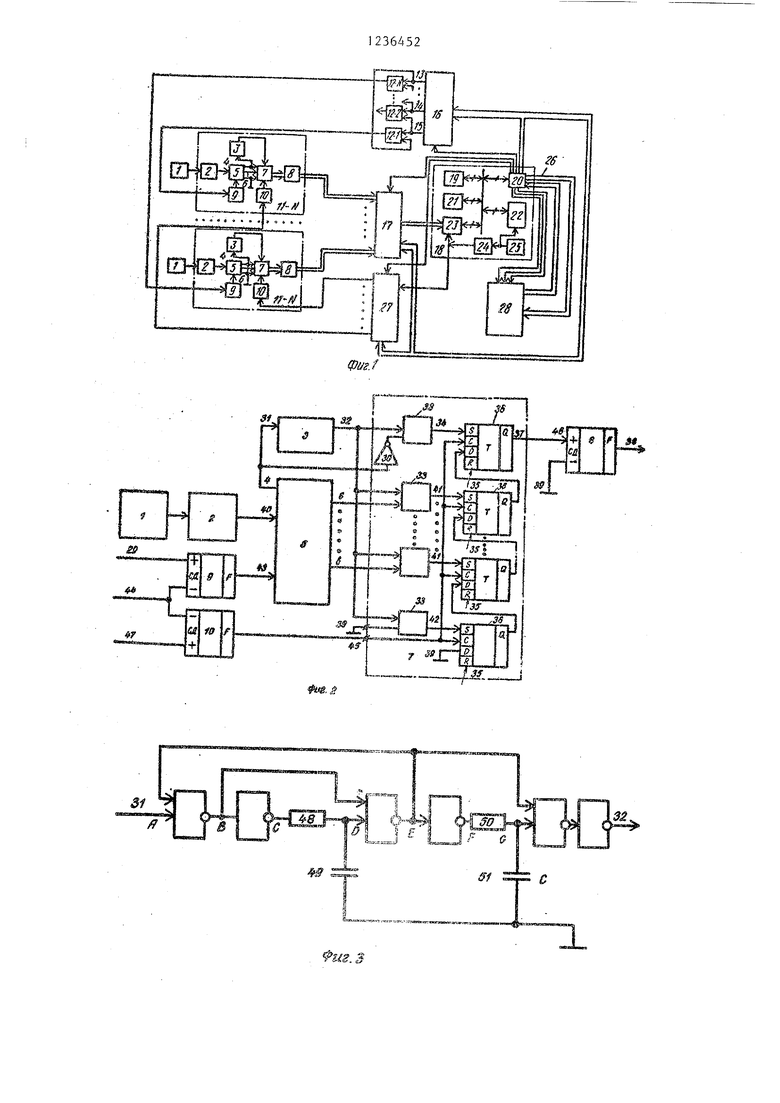
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - схема блока преобразования данных; на фиг. 3 - схема элемента задержки; на фиг. 4 - временные диаграммы входных и выходных сигналов элемента задержки; на фиг. 5 - схема демульти- плексора; на фиг. 6 - структурная схема блока управления; на фиг. 7 - структурная схема микропроцессора; на фиг. 8 - программируемый последовательный интерфейс; на фиг. 9 - программируемый параллельный интерфейс; на фиг. 10 буферный регистр; на фиг. 11 - шинньш формирователь; на фиг. 12 -блок регистрации; на фиг 13 - схема управления следящей системы; на фиг. 14 - кодовые комбинации датчиков положения двигателя следящей системы; на фиг. 15 - временные диаграммы состояния ключей коммутатора; на фиг. 16 - расположение сегментов термопечатающей головки, размещенной на каретке; на фиг. 17 - принципиальная схема дешифратора термопечатающей головки; на фиг. 18 - преобразователь угол - код; на фиг. 19 - блок-схема алгоритма работы устройства; на фиг. 20 - блок-схема алгоритма следящего уравновешивания блоков преобразования,
Устройство (фиг. 1) содержит дат- чики 1, усилители 2, элементы 3 задержки , выход младшего разряда аналого-цифрового преобразователя является выходом Готовность данных 4,, аналого-цифровой преобразователь (АЦП) 5, выходную шину 6, регистр 7 сдвига, оптронные переключатели 8 - 10, отражающие блоки 11-1, 11-N пребразования данных, элементы И-НЕ 12-1, ..., 12-N выходы 13 - 15 дешифратора 16, мультиплексор 17, блок 1 управления, содержаш:ий ОЗУ 19, модуле параллельного интерфейса 20, постоянное запоминающее устройство
(ПЗУ) 21, микропроцессор 22, последо- s5 терфейса, регистр 84 признаков, сты- вательный интерфейс 23, делитель 24 ковое ЗУ 85, устройство 86 управле- частоты, генератор 25 тактовых импульсов, выходную шину 26 модуля паmtK,, блоки и устройства микропроцессора связаны между собой с помощью
s
0
5
0
0
5
раллельного интерфейса 20, демульти- плексор 27, блок 28 регистрации.
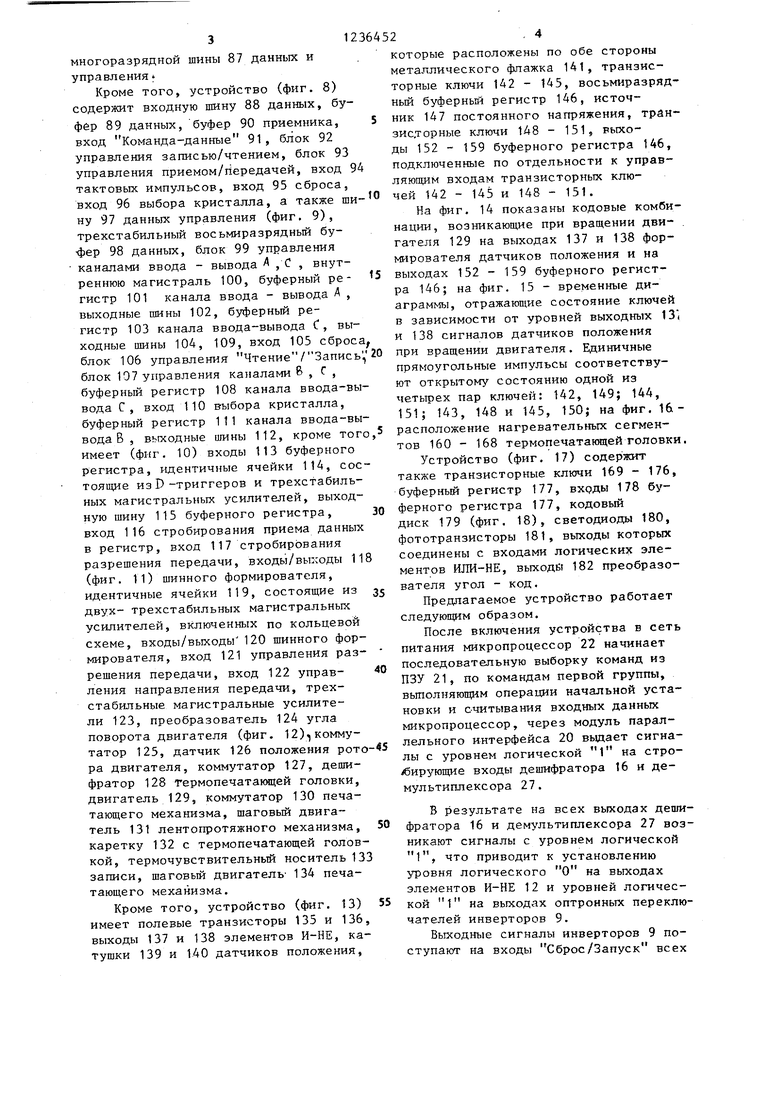
Кроме того, устройство (фиг. 2) содержит вход 29 оптронного переключателя 9, инвертор 30, вход 31 элемента задержки, вход 32 разрешения записи сдвигового регистра 7, элементы И 33, выход 34 одного из элементов И, входы 35 сброса триггеров 36, выход 37 сдвигового регистра 7, выход 38 оптронного переключателя 8, шину 39 нулевого потенциала, информационный вход 40 АЦП 5, выходы 41 элементов И, выход 42 элемента И триггера 36 младшего разряда, управляющий вход 43 АЦП 5, входы-44 оптронньпс переключателей 9 и 10, вход 45 разрешения считывания сдвигового регистра 7, вход 46 оптронного переключателя 8, вход 47 оптронного переключателя 10, а также одно- вибраторы (фиг. 3) с импульсным и потенциальным запусками, построенные на элементах И-НЕ и PC звеньях 48-51.
Време1нная диаграмма сигналов на входе и выходах A,B,C,D,E ,F , G 52 всех элементов 3 задержки показана на фиг. 4.
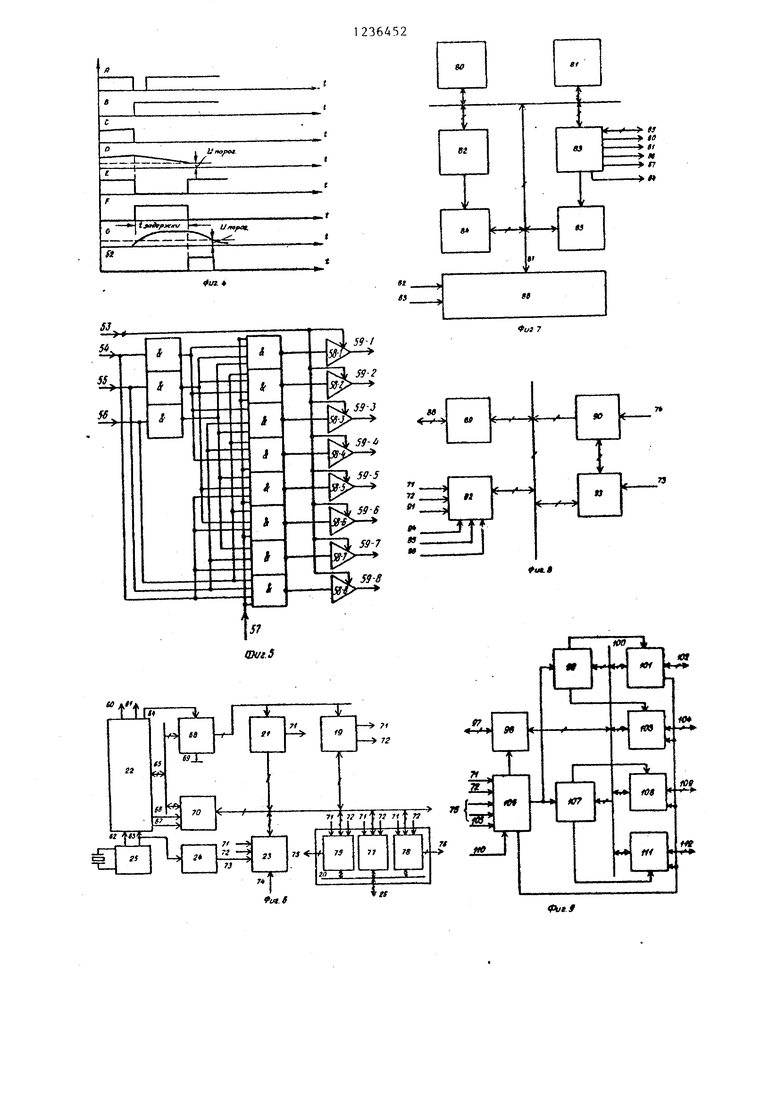
Устройство (фиг. 5) имеет вход 53 стробирования демультиплексора 27, адресные входы 54 - 56, информационный вход 57, магистральные усилители 58-1 - 58-8, выходы 59-1 - 59-8 демультиплексора, а также выходы Чтение и Запись 60 и 61 (фиг.6) микропроцессора, вход 62 сброса микропроцессора, -выход 63 ГТИ, выход 64 синхроимпульсов микропроцессора, общую шину 65, выход 66 передачи - приема данных микропроцессора, выход 67 разрешения передачи данных, регистр 68,, шину 69 нулевого потенциала, шинный формирователь 70, входы 71
чтеютя, входы запись 72 ОЗУ, ПЗУ, последовательного интерфейса 23, вход 73 синхронизации приема, вход 74 приема данных интерфейса 23, адресные шины 755 76 параллельных интерфейсов 77 - 79, блок 80 регистров общего назначения и индексных регистров (фиг. 7)5 указатель 81 команд, арифметико-логическое устройство (АЛУ) 82 J, блоки 83 внутреннего ин
терфейса, регистр 84 признаков, сты- ковое ЗУ 85, устройство 86 управле-
mtK,, блоки и устройства микропроцессора связаны между собой с помощью
ногоразрядной шины 87 данных и правления
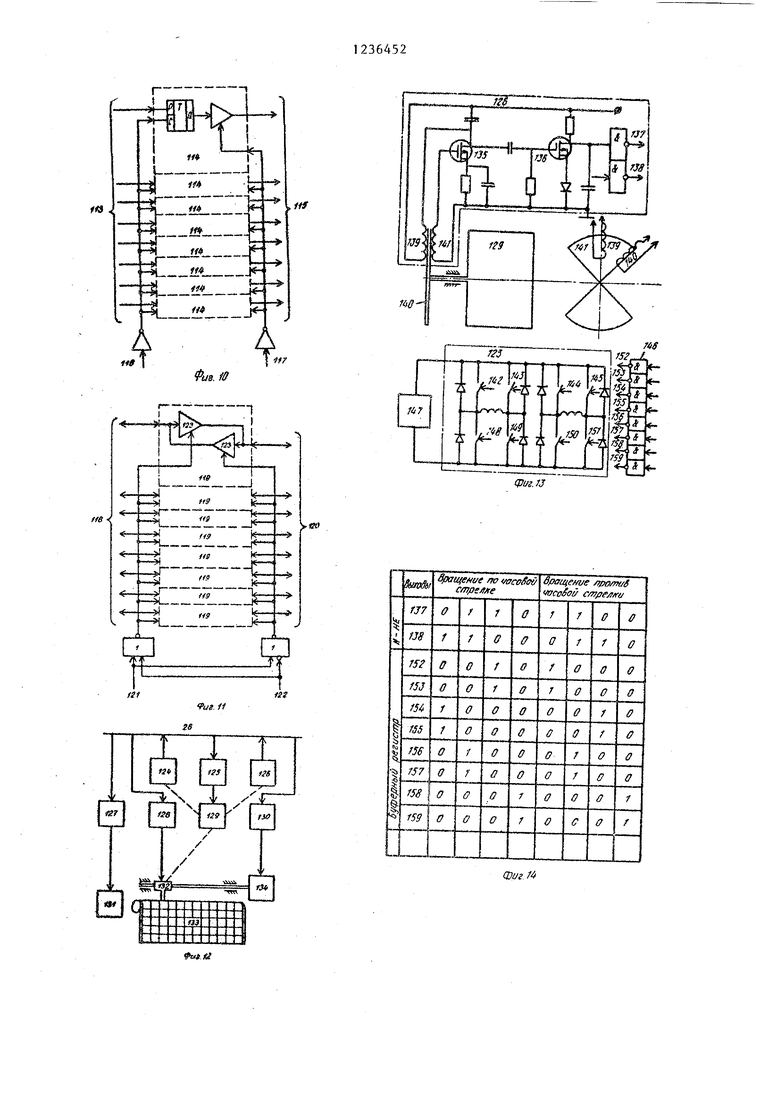
Кроме того, устройство (фиг, 8) содержит входную шину 88 данных, буфер 89 данных, буфер 90 приемника, 5 вход Команда-данные 91, блок 92 управления записью/чтением, блок 93 управления приемом/передачей, вход 94 тактовых импульсов, вход 95 сброса, вход 96 выбора кристалла, а также ши- ну 97 данных управления (фиг. 9), трехстабильный восьмиразрядный буфер 98 данных, блок 99 управления каналами ввода - вывода ,С , внутреннюю магистраль 100, буферный ре- 5 гистр 101 канала ввода - вывода А , выходные шины 102, буферный регистр 103 канала ввода-вывода С, выходные шины 104, 109, вход 105 сброса блок 106 управления Чтение / Запись , 20 блок 107 управления каналами , , буферный регистр 108 канала ввода-вывода С, вход 110 выбора кристалла, буферный регистр 111 канала ввода-вывода В , выходные шины 112, кроме того,5 имеет (фиг. 10) входы 113 буферного регистра, идентичные ячейки 114, состоящие изD -триггеров и трехстабиль- ных магистральных усилителей, выходную шину 115 буферного регистра, 30 вход 116 стробирования приема данных в регистр, вход 117 стробирования разрешения передачи, входы/выходы 118 (фиг. 11) шинного формирователя, идентичные ячейки 119, состоящие из 35 двух- трехстабильных магистральных усилителей, включенных по кольцевой схеме, входы/выходы 120 шинного формирователя, вход 121 управления раз- решения передачи, вход 122 управ- 0 ления направления передачи, трех- стабильные магистральные усилители 123, преобразователь 124 угла поворота двигателя (фиг, 12)коммутатор 125, датчик 126 положения рото- 5 ра двигателя, коммутатор 127, дешифратор 128 термопечатакнцей головки, двигатель 129, коммутатор 130 печатающего механизма, шаговый двигатель 131 лентопротяжного механизма, 50 каретку 132 с термопечатающей головкой, термочувствительный носитель 133 записи, шаговьй двигатель- 134 печатающего механизма,
Кроме того, устройство (фиг. 13) 55 имеет полевые транзисторы 135 и 136, выходы 137 и 138 элементов И-НЕ, катушки 139 и 140 датчиков положения.
которые расположены по обе стороны металлического флажка 141, транзисторные ключи 142 - 145, восьмиразрядный буферный регистр 146, источник 147 постоянного напряжения, тран- зис.торные ключи 1Д8 - 151, выходы 152 - 159 буферного регистра 146, подключенные по отдельности к управ- входам транзисторньтх ключей 142 - 145 и 148 - 151,
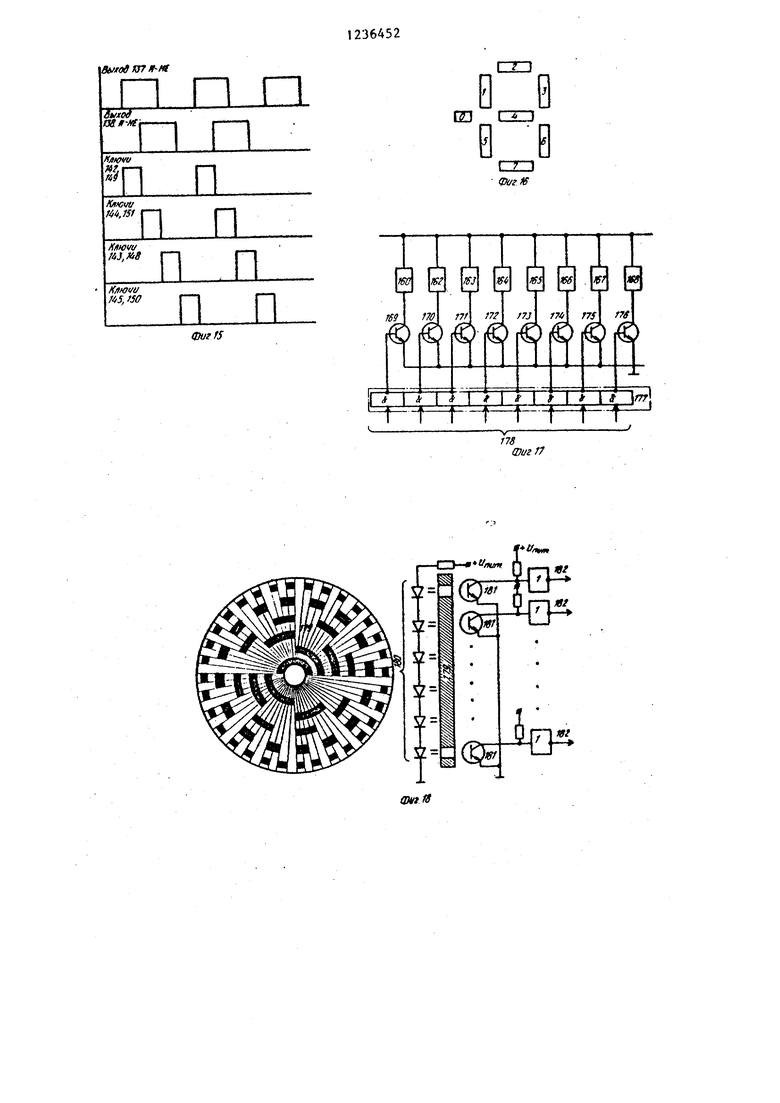
На фиг. 14 показаны кодовые комбинации, возникающие при вращении дни- гателя 129 на выходах 137 и 138 формирователя датчиков положения и на выходах 152 - 159 буферного регистра 146; на фиг. 15 - временные диаграммы, отражающие состояние ключей в зависимости от уровней выходных 13( и 138 сигналов датчиков положения при вращении двигателя. Единичные прямоугольные импульсы соответствуют открытоьгу состоянию одной из четырех пар ключей: 142, 149; 144, 151; 143, 148 и 145, 150; на фиг. 16i- расположение нагревательных сегментов 160 - 168 термопечатающей головки
Устройство (фиг. 17) coдepiжит также транзисторные ключи 169 - 176, буферный регистр 177, вхрды 178 буферного регистра 177, кодовый диск 179 (фиг. 18), светодиоды 180, фототранзисторы 181, выходы которых соединены с входами логических элементов ИЛИ-НЕ, выходВ 182 преобразователя угол - код.
Предлагаемое устройство работает следующим образом.
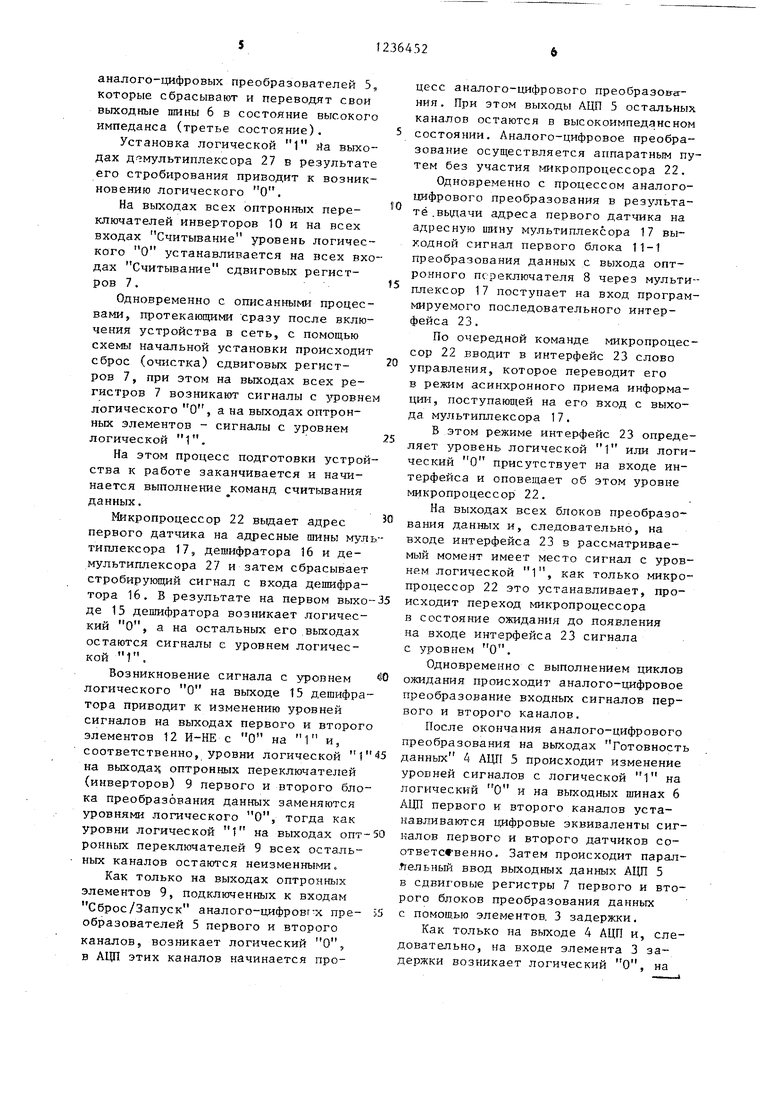
После включения устройства в сеть питания микропроцессор 22 начинает последовательную выборку команд из ПЗУ 21, по командам первой группы, вьшолняюшдм операции начальной установки и считывания входных данных микропроцессор, через модуль параллельного интерфейса 20 вьадает сигналы с уровнем логической 1 на стро- ируюш:ие входы дешифратора 16 и де- мультиплексора 27,
В результате на всех выходах дешифратора 16 и демультиплексора 27 возникают сигналы с уровнем логической 1, что приводит к установлению уровня логического О на выходах элементов И-НЕ 12 и уровней логической 1 на выходах оптронных переключателей инверторов 9,
Выходные сигналы инверторов 9 поступают на входы Сброс/Запуск всех
аналого-цифровых преобразователей 5, которые сбрасывают и переводят свои выходные шины 6 в состояние высокого импеданса (третье состояние).
Установка логической 1 ria выходах д мультиплексора 27 в результате его стробирования приводит к возникновению логического О.
На выходах всех оптронных пере- ключателей инверторов 10 и на всех входах Считывание уровень логического О устанавливается на всех входах Считывание сдвиговых регистров 7.
Одновременно с описанными процес- вами, протекающими сразу после включения устройства в сеть, с помощью схемы начальной установки происходит сброс (очистка) сдвиговых регист- ров 7, при этом на выходах всех регистров 7 возникают сигналы с зфовне логического О, а на выходах оптронных элементов - сигналы с уровнем логической 1.
На этом процесс подготовки устройства к работе заканчивается и начинается выполнение команд считывания данных.
Микропроцессор 22 выдает адрес первого датчика на адресные шины мультиплексора 17, дешифратора 16 и де- мультиплексора 27 и затем сбрасывает стробирующий сигнал с входа дешифратора 16. В результате на первом выходе 15 дешифратора возникает логический О, а на остальных его выходах остаются сигналы с уровнем логической 1.
Возникновение сигнала с уровнем логического О на выходе 13 дешифратора приводит к изменению уровней сигналов на выходах первого и второго элементов 12 И-НЕ с О на 1 и, соответственно, уровни логической t на выходах оптронных переключателей (инверторов) 9 первого и второго блока преобразования данных заменяются уровнями логического О, тогда как уровни логической 1 на выходах оптройных переключателей 9 всех остальных каналов остаются неизменными.
Как только на выходах оптронных элементов 9, подключенных к входам Сброс/Запуск аналого-цифровг х пре- образователей 5 первого и второго каналов, возникает логический О, в АЦП этих каналов начинается про5
5
5
5
5 0
5
цесс аналого-цифрового преобразов-а:- ния, При этом выходы АЦП 5 остальных каналов остаются в высокоимпедансном состоянии. Аналого-цифровое преобразование осуществляется аппаратньпи путем без участия i-икропроцессора 22.
Одновременно с процессом аналого- цифрового преобразования в результате .выдачи адреса первого датчика на адресную шину мультиплексора 17 выходной сигнал первого блока 11-1 преобразования данных с выхода опт- ронного переключателя 8 через мультиплексор 17 поступает на вход программируемого последовательного интерфейса 23,
По очередной команде микропроцессор 22 вводит в интерфейс 23 слово управления, которое переводит его в режим асинхронного приема информации, поступающей на его вход с выхода мультиплексора 17,
В этом режиме интерфер1С 23 определяет уровень логической 1 или логический О присутствует на входе интерфейса и оповещает об этом уровне микропроцессор 22.
На выходах всех блоков преобразо вания данньтх и, следовательно, на входе интерфейса 23 в рассматриваемый момент имеет место сигнал с уровнем логической 1, как только микропроцессор 22 это устанавливает, происходит переход микропроцессора в состояние ожидания до появления на входе интерфейса 23 сигнала с уровнем О,
Одновременно с выполнением циклов ожидания происходит аналого-цифровое преобразование входных сигналов первого и второго каналов.
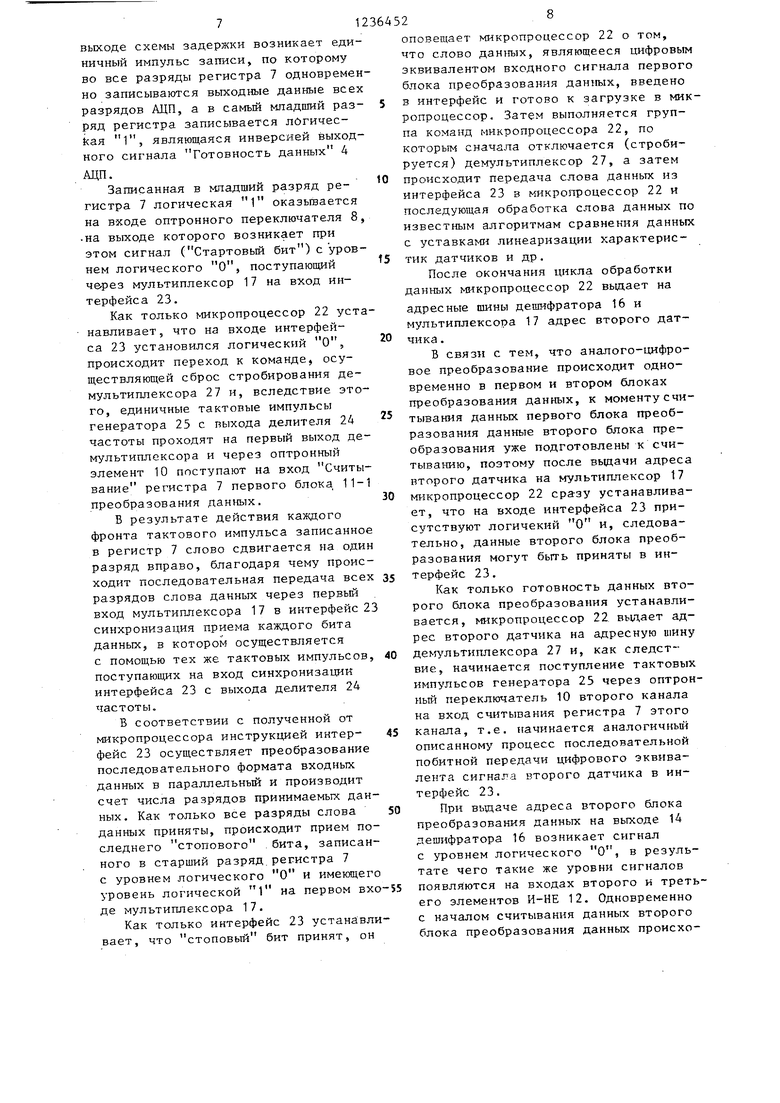
После окончания аналого-цифрового преобразования на выходах Готовность данных 4 АЦП 5 происходит изменение уровней сигналов с логической 1 на логический О и на выходных шинах 6 АЦП первого и второго каналов устанавливаются ц нфровые эквиваленты сиг- калов первого и второго датчиков со- ответс€ венно. Затем происходит параллельный ввод выходных данных А1Щ 5 в сдвиговые регистры 7 первого и второго блоков преобразования данных с помощью элементов. 3 задержки.
Как только на выходе 4 АЦП и, следовательно, на входе элемента 3 задержки возникает логический О, на
выходе схемы задержки возникает единичный импульс записи, по которому во все разряды регистра 7 одновременно записываются выходные данные всех разрядов АЦП, а в самый мпадишй раз- ряд регистра записывается логическая 1, являющаяся инверсией выходного сигнала Готовность данных 4 АЦП.
Записанная в младший разряд регистра 7 логическая 1 оказьгеается на в-ходе оптронного переключателя 8, на выходе которого возникает при этом сигнал (Стартовый бит) с уровнем логического О, поступающий че-рез мультиплексор 17 на вход интерфейса 23.
Как только микропроцессор 22 устанавливает, что на входе интерфейса 23 установился логический О, происходит переход к команде, осуществляющей сброс стробирования де- мультиплексора 27 и, вследствие этого, единичные тактовые импульсы генератора 25 с выхода делителя 24 частоты проходят на первый выход де- мультиплексора и через оптронный элемент 10 поступают на вход Считывание регистра 7 первого блокц 11-1 преобразования данных.
В результате действия каждого фронта тактового импульса записанное в регистр 7 слово сдвигается на один разряд вправо, благодаря чему происходит последовательная передача всех разрядов слова данных через первый вход мультиплексора 17 в интерфейс 23 синхронизация приема каждого бита данных, в котором осуществляется с помощью тех же тактовых импульсов, поступающих на вход синхронизации интерфейса 23 с выхода делителя 24 частоты,
В соответствии с полученной от микропроцессора инструкцией интер- фейс 23 осуществляет преобразование последовательного формата входных данных в параллельный и производит счет числа разрядов принимаемых данных. Как только все разряды слова данных приняты, происходит прием последнего стопового .бита, записанного в старший разряд.регистра 7 с уровнем логического О и имеющего уровень логической 1 на первом вхо де мультиплексора 17.
Как только интерфейс 23 устанавливает, что стоповый бит принят, он
5
0
0
5
5 0 5
оповещает микропроцессор 22 о том, что слово данных, являющееся цифровым эквивалентом входного сигнала первого блока преобразования , введено в интерфейс и готово к загрузке в микропроцессор. Затем выполняется группа команд микропроцессора 22, по которым сначала отключается (строби- руется) демультиплексор 27, а затем происходит передача слова данных из интерфейса 23 в микропроцессор 22 и последующая обработка слова данных по известным алгоритмам сравнения данных с уставкам линеаризации характеристик датчиков и др.
После окончания цикла обработки данных }Ф1кропроцессор 22 выдает на
адресные шины дещифратора 16 и мультиплексора 17 адрес второго датчика .
В связи с тем, что аналого-цифровое преобразование происходит одновременно в первом и втором блоках преобразования данных, к моменту считывания данных первого блока преобразования данные второго блока преобразования уже подготовлены к считыванию, поэтому после выдачи адреса второго датчика на мультиплексор 17 микропроцессор 22 сразу устанавливает, что на входе интерфейса 23 присутствуют логичекий О и, следовательно, данные второго блока преобразования могут быть приняты в интерфейс 23.
Как только готовность данных второго блока преобразования устанавливается, микропроцессор 22 выдает адрес второго датчика на адресную тину дe yльтиплeкcopa 27 и, как следствие, начинается поступление тактовых импульсов генератора 25 через оптронный переключатель 10 второго канала на вход считывания регистра 7 этого канала, т.е. начинается аналогичньш описанному процесс последовательной побитной передачи цифрового эквивалента сигнала второго датчика в интерфейс 23.
При вьщаче адреса второго блока преобразования данных на выходе 14 дешифратора 16 возникает сигнал с уровнем логического О, в результате чего такие же уровни сигналов появляются на входах второго и третьего элементов И-НЕ 12. Одновременно с началом считывания данных второго блока преобразования данных происходит запуск аналого-цифрового преобразования входных данных третьего блока преобразования и подготовка данных третьего блока преобразования к считыванию.
Если бьктродействие АЦП достаточно высоко по сравнению с быстродействием микропроцессора при обработке данньЕХр то к моменту окончания процессов считывания и обработки данных второго канала аналого-цифровое преобразование входных данных третьего канала заканчивается к они вводятся в регистр 7 третьего блока преобразования. Затем микропроцессор выдает адрес третьего блока преобразования, вследствие чего происходит считывание данных третьего блока пре образования и подготовка к считыванию данных четвертого блока преобразования и так далее до последнего блока преобразования данных, при считывании данных которого подготавливаются данные первого блока преобазования и цикл считывания и обработки даннь х всех блоков преобразования данных начинает повторяться, Совмещение во времени процессов считьшания и обработки данных любого . блока преобразования данных с подготовкой данных следукщёго (1+1)- го.блока преобразования данных в предлагаемом устройстве позволяет существенно повысить быстродействие устройства в связи с исключением в установившемся режиме циклов дания микропроцессора 5 что обеспе- ч. -юает минимизацию времени приема и обработки информации в рассмотренном режиме работы устройства когда регистрация значений входных данных не производитсяJ и позволяет повысить частоту коммутации выходных данных каналов по сравнению с частотой кo rмyтaции известного устройства.
Регистрация значений входньк сигналов про;водится в предлагаемом устройстве периодически через задавае- Mbie оператором интервалы времени., кратные длительности цикла считывания и обработки данных всех блоков преобразования,
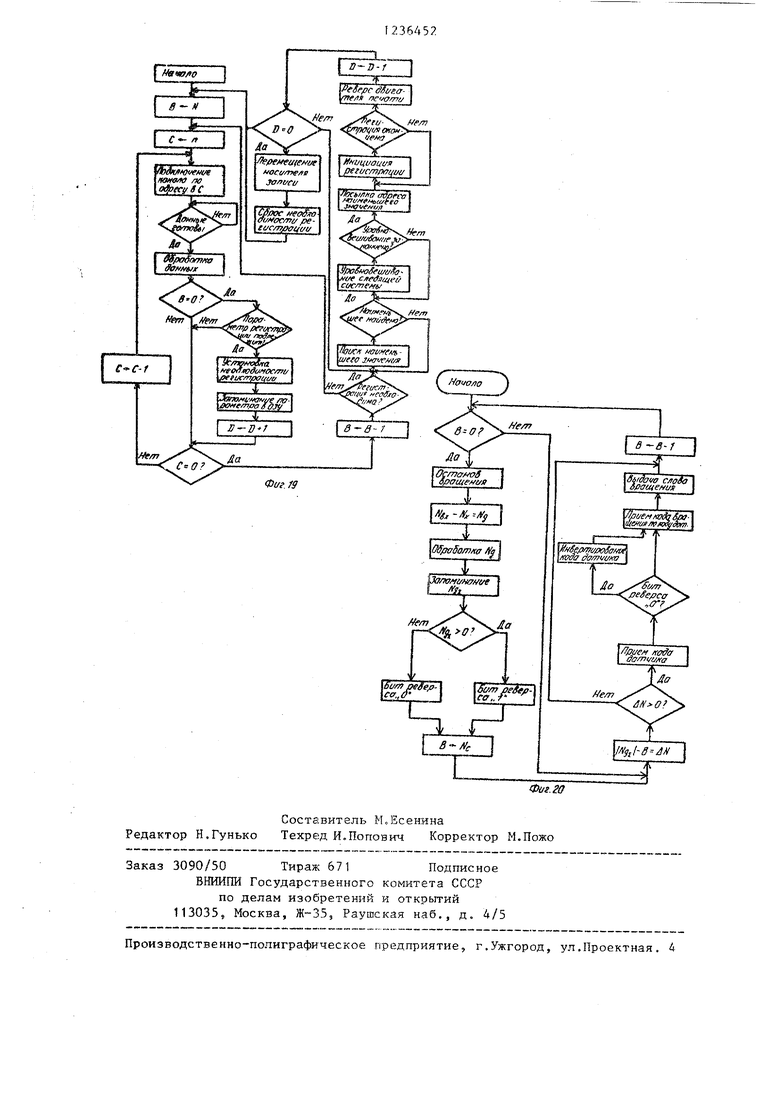
Функционирование устройства при выполнении им циклов считывания, обработки данных и регистрации дчннь Х происходит по предлагаемом алгоритму блок-схема которого представлена на фиг о 19.
По предлагаемому алгоритму до начала описанных циклов считьшанияi и обработки данных в один из регистров общего назначения (РОН)В микро- процессора 22 вводится с помощью клавишного устройства ввода число N, равное числу циклов считывания и обработки данных без их регистрахЕИи.
Затем в РОН С вводится число п.
равное числу датчиков входнь х сигналов, уменьшенному на единицу, после чего происходит подключение первого датчика по адресу в регистре С и начинается описанный вьппе цикл считываимя и обработки данных всех каналов.
После обработки данных калздого ка- нахга по команде условного перехода , определяют прошло ли заданное число циклов считьгоания и обработки.
Если введенное оператором число , то на первом цикле считывания происходит переход к выполнению команды устанавливающий все ли датчики опрошены в течении текущего цикла, после чего содержимое регистра С уменьшается на единицу и в нем оказывается адрес следу1шдего датчика. Как только Первый 1глкп считывания и обработки данных заканчивается, т.е. устанавливается5 что со- дергкимое регистра 8 уменьшается на единицу и затем, так как необходимость регистрации не была установлена 5 ос:лцествляется переход к команде
, с которой начинается вьтолне- ние второго дакла считывания и обработки даннык всех каналов.
После каждого цикла считывания и обработки содержимое регистра В уменьшается на единицу, поэтому наступает момент, когда В оказывается равным нулю.
Как только устанавливается, что В-О, определяют подлежат ли регистраLIHH данные очередного блока преобразования данных. Необходимость регистрации данных устанавливается оператором заранее с помощью клавишного устройства с передней панели.
Если параметр регистрации не подлежит, происходит переход к подключению следующего датчика. Затем результат обработки подлежащих регистрации данных очередного блока преобразова- ВИЯ данных записывается по своему адресу (адрес находится в регистре в ОЗУ 19 и выполняется команда прибавления единиць к содержимому РОН
D микропроцессора, смысл которой будет ясен из дальнейшего.
Далее, если , подключается следующий датчик, результат обработки данных которого записывается в ОЗУ 19 в том случае, если регистрция данных этого датчика необходима и так далее до конца цикла.
После окончания цикла считывания и обработки данных в ОЗУ 19 записывают данные тех датчиков, сигналы которых подлежат регистрации.
Затем после операции А «-Л-1 устанавливается, что регистрация необхо
дима. Для получения максимальной ско-15 меньшего значения и так далее до рерости регистрации записанные в ОЗУ данные регистрируются поочередно в порядке возрастания их значений.
Для реализации указанной процедуры до начала регистрации происходит поиск наименьшего значения из всех данных записанных в ОЗУ 19, осуществляемый по любому из известных алгоритмов. Затем начинается процесс регистрации первого наименьшего зна- чения по алгоритму, который будет описан отдельно.
В процессе регистрации подвижная каретка с термопечатающей головкой перемещается вдоль термочувствитель- ной диаграммной ленты на расстояние, пропорционапьное найденному наименьшему значению из значений входных сигналов.
Перемещение каретки производится согласно описанному далее алгоритму с помощью программно-управляемой цифровой следящей системы.
После достижения кареткой установившегося положения относительно ди- аграммной ленты происходит посылка адреса датчика, имеющего наименьшее значение входного сигнала на дешифратор термопечатающей головки блока 28 регистра1у1И, в результате про- исходят нагрев соответствуюп;их сегментов головки и подготовка ее к отпечатыванию точки и номера датчика. /
Далее программным путем по извест ному алгоритму происходит управление шаговым двигателем печати, в соответствии с которым он осуществляет прижим термопечатающей головки к диаграммной ленте на время, необходимо для получения качественного отпечатка точки и номера датчика,а затем происхо- аит реверс двигателя итермопечатающая
головка возвращается в исходное положение.
После окончания регистрации первого наименьшего значения содержимое регистра D уменьшается на единицу и, если после этой аперации устанавливается, что , происходит поиск второго наименьшего значения, т.е. поиск наименьшего значения из оставшихся в ОЗУ 19 значений входных сигналов.
Найденное второе наименьшее значение регистрируется так же, как и первое, затем осуществляется поиск и последующая регистрация третьего наигистрации последнего записанного в ОЗ значения.
Число, записанное в регистр D после окончания цикла считьгеания и обработки данных, равно числу параметров, подлежащих регистрации и, в общем случае, это число меньше числа датчиков h .
В связи с тем, что после регистрации каждого из значений входных сигналов содержимое D уменьшается на единицу, все записанные в ОЗУ 19 значения будут зарегистрированы на диаграммной ленте прибора тогда,когда содержимое Остановится равным нулю.
Как только устанавливается, что , на коммутатор шарового двигателя лентопротяжного механизма блока 2 регистрации через интерфейс 20 вьща- ется очередной код управления двигателем, ротор которого в результате поворачивается на один шаг и продвигает диаграммную ленту прибора для осуществления временной развертки регистрируемьтх данных.
Далее, так как цикл регистрации всех данных закончен, происходит возврат к циклам считывания и обработки данных, т.е. к операциям А -N,P)-n и т.д.
Наибольшая частота регистрации даных имеет место при . В этом случае после каждого цикла обегания датчиков следует цикл регистрации их сигналов и наоборот.
Промежуток времени Г, между следующими один за другим периодами регистрации данных одного и того же датчика в этом случае определяется соотношением
Р Q о ftp
где Т - время обработки данных;
Ч Т«
- длительность цикла регистрации всех параметров. складывается из суммарного времени уравновешивания следящей системы,- что составляет 1 0 с при регистрации- 16 входных данных и суммарного времени термопечати, занимающего не более 0,3 с что,, обычно, не превышает ,20 с, поэтому Тр„с%:,.1,5 с.
Время 5 затрачиваемое в среднем в течение интервала Тр на регистрацию одного параметраJ составляет ,при менее 0,1 с, что по крайней мере в 255 раза меньше, чем у известных многоканальных устройств.
Блок-схема алгоритма процесса Зфавновешивания цифровой следящей системы, входящей в состав блока 28 регистрации, предлагаемого устрой- ства,. Представлена на фиг, 20.
Процесс уравновешивания происходит следуюгцим образом.
Сначала из ПЗУ выбирается команда проверки содержимого одного из ре-- гистров, общего назначения РОН В микропроцессора,, Затем, так как в исходном состоянии В 0, на входы восьми силовых ключей коммутатора двигателя следящей системы через вось- миразрядный буферный регистр из модуля интерфейса 20 поступает параллельный код 01100110, являкяцийся кодом останова двигателя.
Микропроцессор через модуль парал лельного интерфейса 20 принимает выходной код N| преобразователя 124 угол - код (фиг 12)5 являющийся цифровым эквивалентом перемещения каретки блока регистрации относительно начальной отметки диаграммной ленты
Шкропроцессор вычисляет разность Np,-N,,N,. меядчу цифровыми эквиt X к ф
валентами входного сигнала и сигналом .компенсации Nr.
Затем, если разность N. не превышает допускаемого значения дН, хранящегося в ПЗУ и определяющего точность регистрации данных, происходит возврат к выполнению операций основ- ной программы (блок-схема алгоритма которой показана на фиг. 18), если положение каретки не соответствует
значению входного сигнала N , начинается выполнение математических раций C Nn, результатом которых является получение числа N,,j. , равного сумме двух слагаемых, первое из ко
торых пропорционально разцости Ng - . ,-N., а второе пропорционально скорое К
ти изменения этой разности.
Далее определяется знак К ли N 05 в одном из
и,
ееV
ла (- программируемого параллельного интерфейса устанавливается уровень логической 1, а если Nr, 0 - уро- вень логического О.
Затем в РОН В микропроцессора из ПЗУ записывается число N - цифровой эквивалент линейной зоны следящей систем1з, равный максимальномз значению разн ости Ng N, при достижении которого скорость двигателя следящей системы максимальна.
При увеличении разности N скорость вращения двигателя следящей системы возрастает, однако при достижении максимального значения этой разности, равного N , скорость двига- т-еля становится максимально возможной и при дальнейшем росте разности Njjj,-N уже не изменяется.
По следующим каналам происходит
сравнение модуля I N регистра В , т.е. с двигатель остается
; содержимым Если IN,
Ч-у
NCв состоянии остаfl
нова, содержимое регистра В затем
уменьшается на единицу осуществляется возврат
ла,
т.е. к
ти AN)i
И; если В 0, к началу цик- определению знака разнос- J-iBl. Рассмотренные циклы повторяются один за другим до того момента, когда AN становится больше нуля или равно нулю.
Как только устанавливается, что uN: О, происходит прием кода датчиков положения в микропроцессор через модуль интерфейса 20,
Принятый код датчиков положения используется в качестве адреса, по которому из ПЗУ 19 выбирается код вращения двигателя следящей системы.
Перед выборкой кода вращения из ПЗУ определяется направление вращени двигателя „
Если -цифровой эквивалент ошибки компенсации Nn следящей системы поЧ
ложителен, код вращения двигателя выбирается из ПЗУ непосредственно по адресу, являющимся кодом датчиков положения, если же Nn .0, сначала происходит инвертирова ние кода датчиков и затем выборка кода вращения . по инверсному адресу.
Инвертирование адреса кода враще- fffi.q .обеспечивает изменение направления вращения двигателя, так как порядок следования командных слов, управляющих вращением двигателя, изменен на обратный.
Выбранный из ПЗУ восьмиразрядный код вращения через буферный регистр 146 (фиг. 13) поступает на силовые ключи коммутатора двигателя следящей системы. Двигатель начинает вращаться, в связи с чем число N возрастает, а значения ошибки Ng,-N| уменьшаются.
Затем происходит уменьщение содержимого регистра В на единицу, если , выбирается очередное слово вращения двигателя из ПЗУ, содержимое регистра В уменьшается снова на единицу и так далее до момента, когд содержимое регистра В не станет рав- ным нулю.
Как только устанавливается, что , выдается код останова двигателя который благодаря этому переходит в состояние динамического торможения и начинается очередной аналогичный описанному цикл приема и обработки новой информации о положении карет- ки, т.е. получение цифрового эквивалента N перемещения каретки относи- тельно нулевой отметки на диаграммной ленте, математическая обработка разности и т.д.
Временной интервал каждого цикла программы уравновешивания делится на время, когда на двигатель поступает код останова, и время, в течение которого двигатель находится под управлением кода вращения, причем, если пренебречь временем обработки разности No, составляющим всего лишь десятки микросекунд, время поступления кода вращения оказывается прямо пропорциональным значению опшбки INj т.е. реализуется ШИМ - модуляция N. Поэтому, чем больше INol, тем больше средняя скорость двигателя, что и требуется для процесса следящего уравновешивания.
Формула изобретения
Многоканальное устройство для регистрации информации, содержащее мультиплексор, блок управления, блок регистрации и блоки преобразования данных, каждый из которых содержит у.илитель, аналого-цифровой преобразователь и регистр сдвига, входы усилителей являются входами устройства, а их выходы соединены с информационными входами аналого-цифровых преобразователей, вькоды которых подключены к информационным входам всех разрядов регистров сдвига, кроме входов старшего и мпадшего разрядов, выходы регистров сдвига через мультиплексор подключены к информационным входам блока управления, адресные выходы блка управления соединены с адресными входами мультиплексора, информационные выходы блока управления подключены к информационным входам блока регистрации, выходы синхронизации которого соединены с входами синхронизации блока управления, выходы синхронизации блока управления соединены с входами управления блока ре- истрацки, выход стробирования блока управления соединен с входом стробирования мультиплексора, отличающееся тем, что, с целью повышения бьютродействия устройства, в него введены дешифратор, демульти- плексор и элементы И-НЕ, в каждый блок преобразования данных введен элемент задержки, выход Готовность данных аналого-цифрового преобразователя подключен к входу мпадшего разряда регистра сдвига и к входу элемента задержки, выход которого соединен с входом разрешения записи регистра сдвига, информационный вход старшего разряда которого подключен к шине нулевого потенциала, выходы демультиплексора подключены к входам разрешения считьшания регистров сдвига, первый вход каждого элемента И-НЕ объединен с вторым входом последующего элемента И-НЕ, первый вход последнего элемента И-НЕ соединен с вторым входом первого элемента И-НЕ, первые входы элементов И-НЕ подключены к выходам дешифратора, выходы элементов И-НЕ подключены к управляющим входам аналого-цифровых преобразователей, тактовый выход блока управления подключен к информационному входу демультиппексора, адресные выходы блока управления подключены к информационным входам дешифратора и адресным входом демультиплексора, а его выходы стробирования подключены к входам стробирования дешифратора и демультиплексора.
НЯ,
1Г1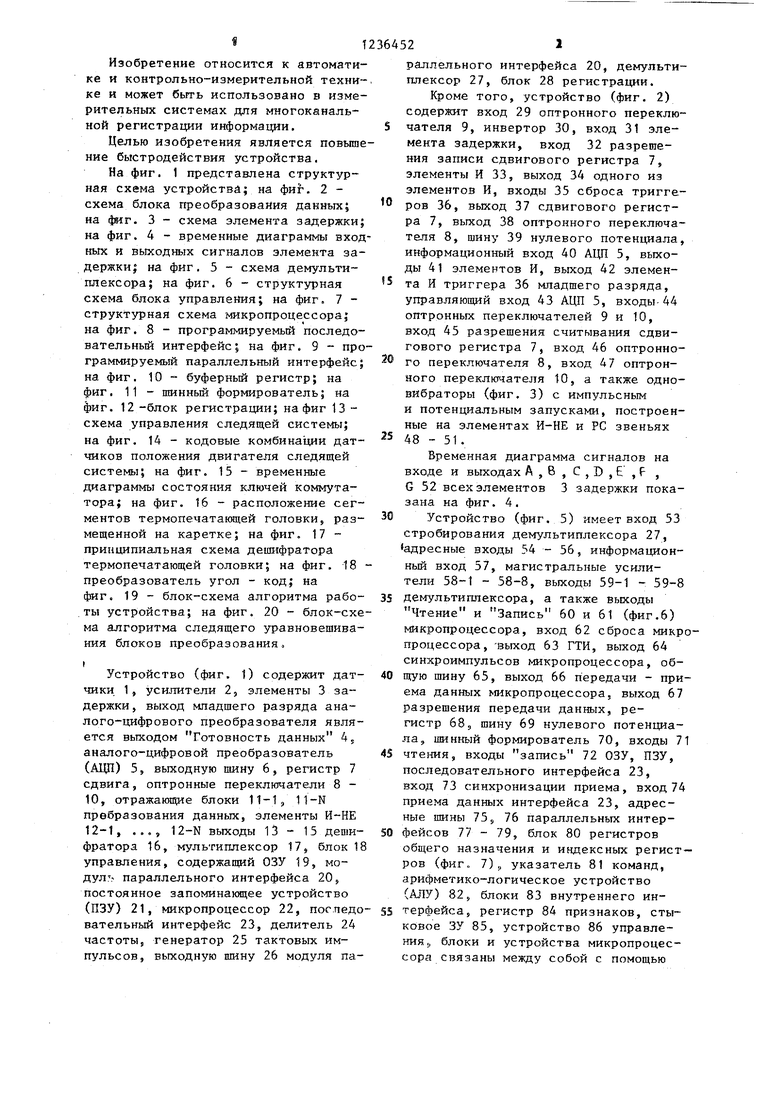
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
| Устройство защиты и автоматики распределительной подстанции | 1988 |
|
SU1584023A1 |
| УСТРОЙСТВО ВВОДА АНАЛОГОВЫХ СИГНАЛОВ | 2013 |
|
RU2554508C2 |
| УСТРОЙСТВО ОБРАБОТКИ АНАЛОГОВЫХ СИГНАЛОВ С ПРИМЕНЕНИЕМ ЦИФРОВОЙ ФИЛЬТРАЦИИ | 2021 |
|
RU2777306C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для сигнализации | 1986 |
|
SU1481824A1 |
| КОМПЛЕКС МНОГОКАНАЛЬНОЙ ЭКСПРЕСС ДИАГНОСТИКИ | 1997 |
|
RU2152073C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1994 |
|
RU2108623C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
Изобретение относится к автоматике и контрольно-измерительной технике и может быть использовано в измерительных системах для многоканальной регистрации информации. Цель изобретения - повышение быстродействия. В многоканальное устройство для регистрации информации, содержащее мультиплексор, блок управления, блок регистрации и блоки преобразования данных, каждый из которых содержит усилитель, аналого-цифровой преобразователь, регистр сдвига, введены дешифратор, демультиплексор и элементы И-НЕ, в каждый блок преобразования данных введен элемент задержки. 20 ил. о (Л ю оо СГ5 и ел to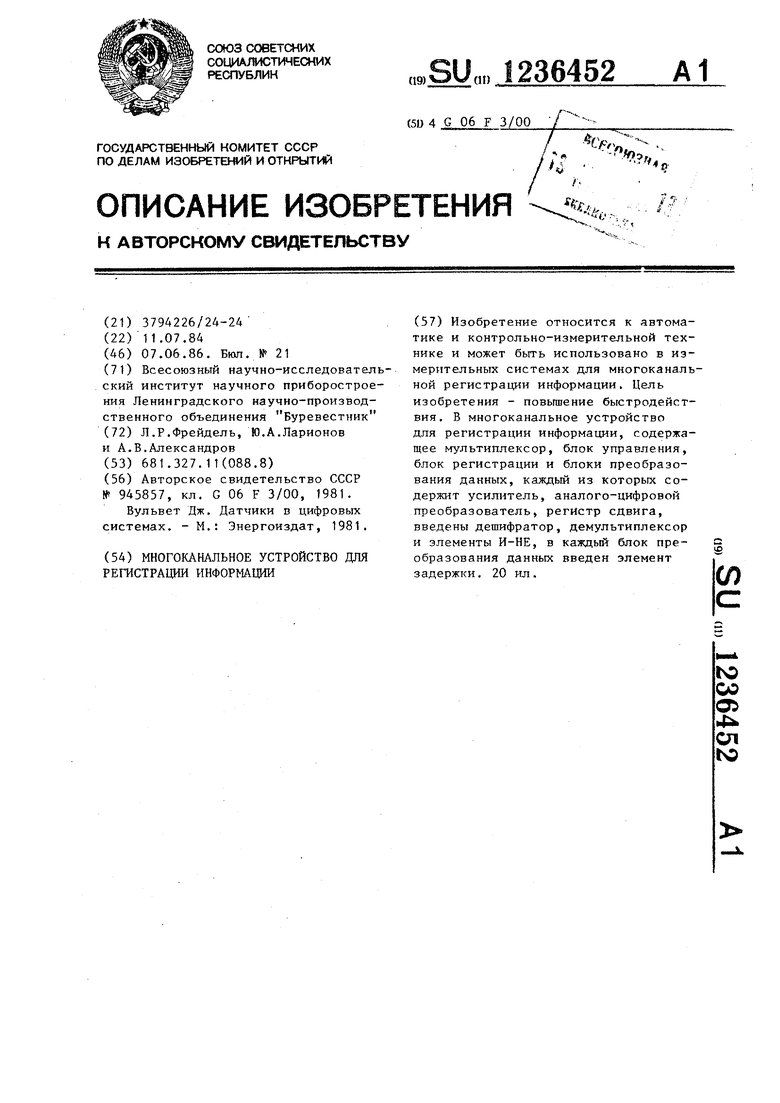
off
Фш. fff
У «SI
лгг
фиг. /J
Фиг. Л
Ш одП71 М
Hifjtoff яиг/г-лг
Хйют
т.
№
п п
ш о:
са
ф1/гК
Кмлт
т,}51
Хйют К},8
П п
Kitfovu Щ SO
(DuffS
Г78 ФигГ7
.
/км
«
Фиг. f9
- ием-
I
/«3
Фиг. го
Составитель МоЕсенина Редактор Н.Гунько Техред И.Попович Корректор М.Пожо
Заказ 3090/50 Тираж 671 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое гфедприятие, г.Ужгород, ул.Проектная. 4
| Многоканальное устройство для сбора и регистрации информации | 1980 |
|
SU945857A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вульвет Дж | |||
| Датчики в цифровых системах | |||
| - М.: Энергоиздат, 1981. | |||
