Изобретение относится к экскаваторной технике и может быть использовано для привода механизмов мощных электрогидравлических экскаваторов.
Целью изобретения является повышение надежности и устранение самохода механизмов экскаватора.
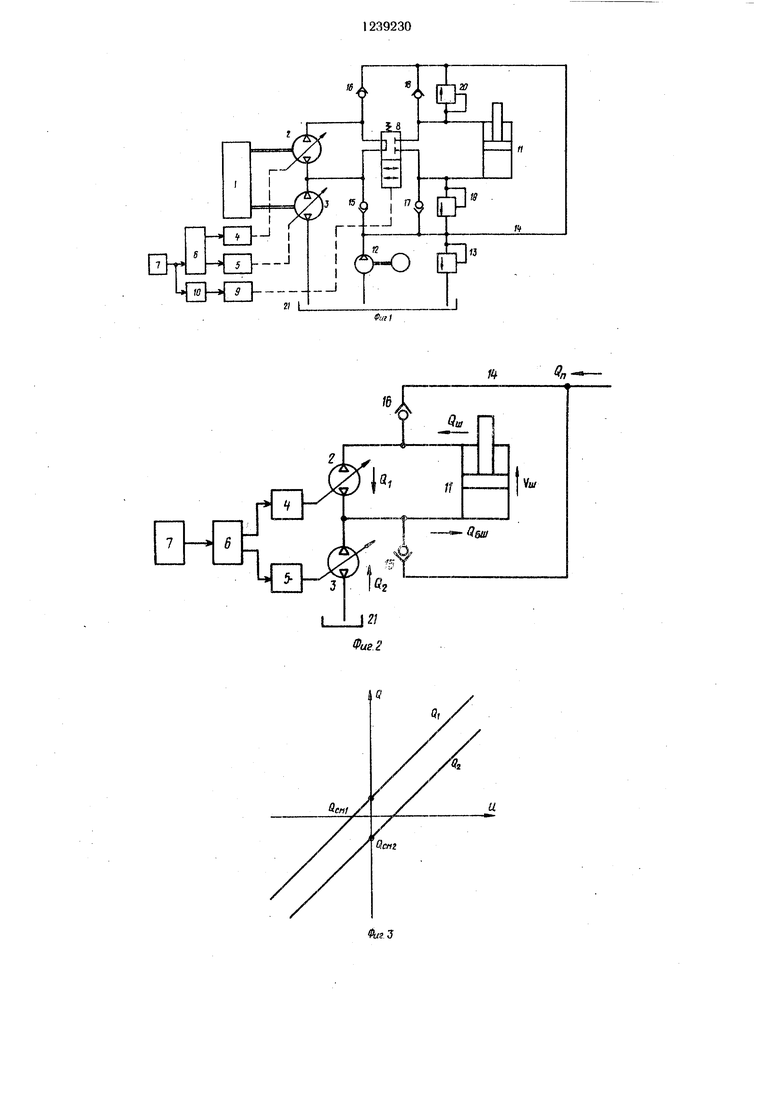
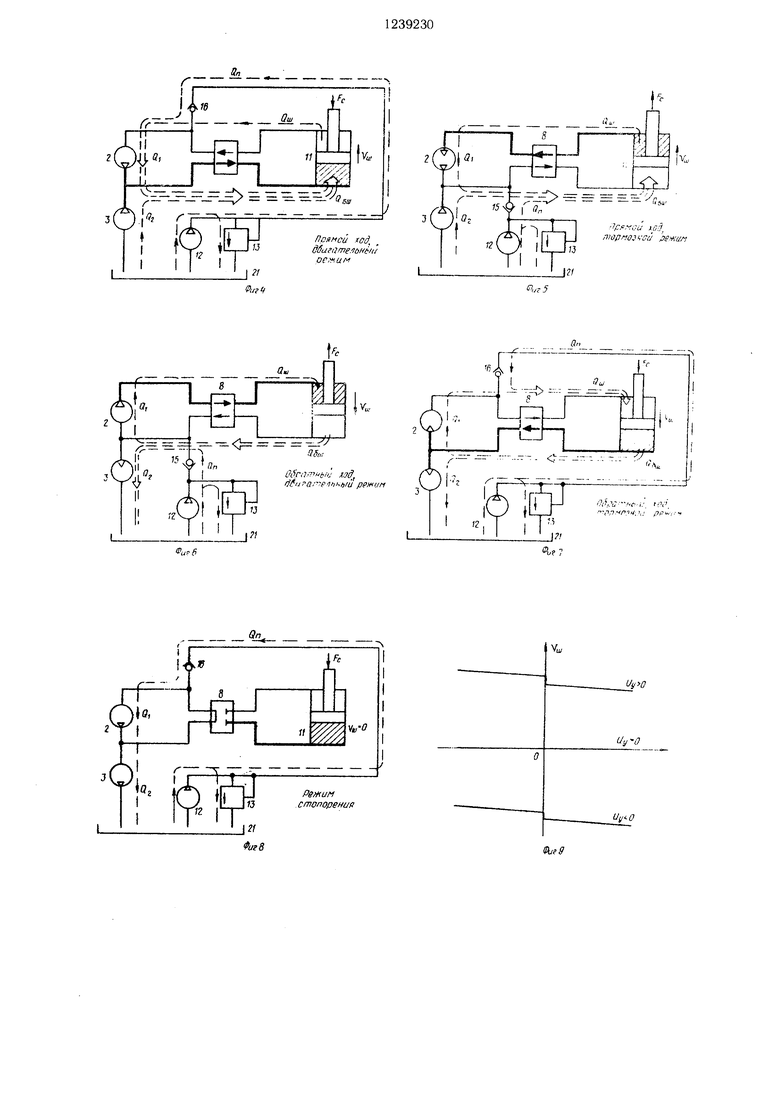
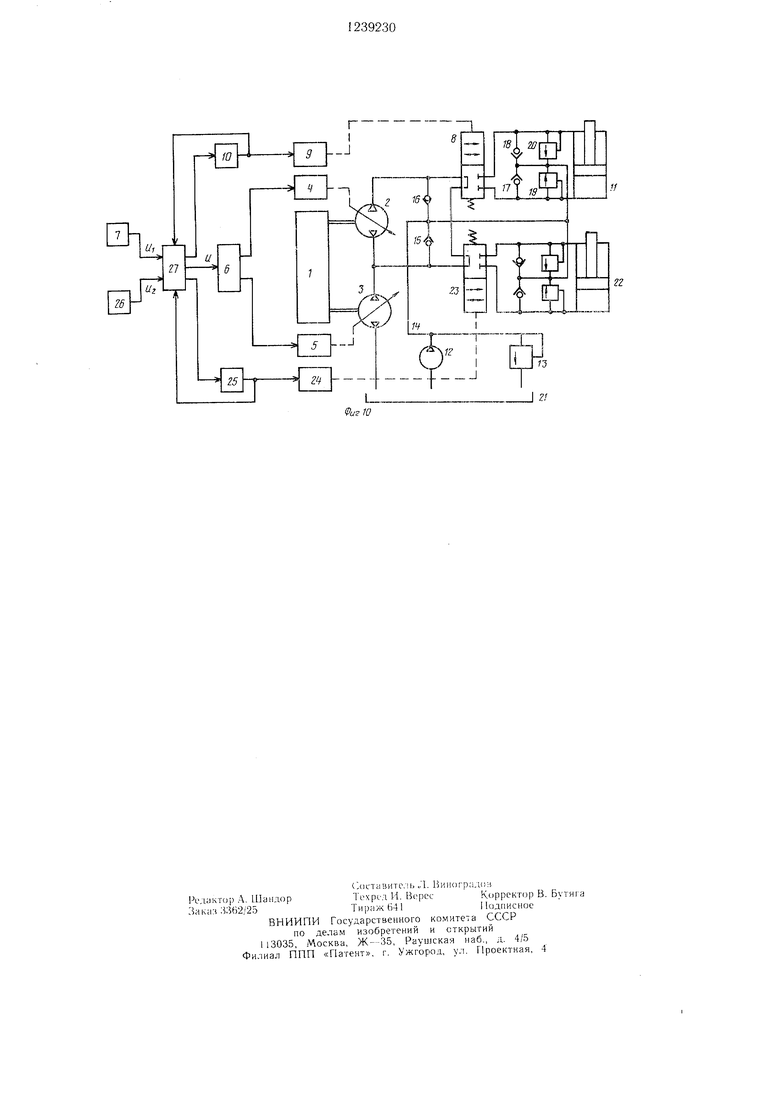
На фиг. I представлена схема предлагаемого электрогидравлического привода; на фиг. 2 - схема соединения основных гидромашин привода при включении гидроразъединителя; на фиг. 3 - зависимости геометрических подач гидронасосов от сигнала на выходе командного органа; на фиг. 4- 8 показаны схемы соединения гидромашин и циркуляции потоков рабочей жидкости предлагаемого устройства в различных режимах работы (соответственно прямой ход, двигательный и тормозной режимы; обратный ход, двигательный и тормозной режимы; режим стопорения); на фиг. 9 - механические характеристики привода, соответствующие различным сигналам на выходе командного органа; на фиг. 10 - схема привода для нескольких рабочих гидроцилиндров-.
Привод (фиг. 1) содержит первичный электрический двигатель , гидронасосы 2 и 3, сервоприводы регулирующих органов этих гидронасосов 4 и 5, блок 6 управления, блок 7 формирования команд,, гидроразъединитель 8 замкнутого контура с приводом 9 и нуль-органом 10, рабочий гидроцилиндр П., насос 12 подпитки со сливным клапаном 13, линию 14 подпитки, подпиточные 15-18, предохраните.тьные клапаны 19 и zO и бак 21 рабочей жидкости.
Гидронасос 2 соединен с полостями ги - роцилиндра 1 по замкнутой схеме через гидроразъединитель 8, привод 9 которого соединен с блоком 7 формирования команд через нуль-орган 10. Гидронасосы 3 связаны с гидроцилиндром i 1 по разомкнутой схеме, причем первая полость гидронасосов 3 соединена с первой полостью гидронасосов 2, связанной через гидроразъ.::(.инитель 8 с бес- штоковой полостью гидроцилиндра 11, а вторая полость гидронасосов 3 связана с баком 21 рабочей жидкости. Линии, соединяющие гидроразъединитель с гидроцилиндром и гидронасосами, связаны с линией 14 подпитки через подпиточные клапаны 15- 18, причем параллельно клапанам 17 и 18 подключены предохранительные клапаны 59 и 20. Линия 14 подпитки связана с бако.м рабочей жидкости через насос 12 подпитки и сливной клапан 13. Входы сервоприводов 4 и 5 подключены к выходу блока 7 формирования команд через блок 6 управления.
Принцип действия предлагаемого устройства заключается в следующем.
Золотник гидроразъединителя 8 имеет два положения; рабочее и нулевое. В рабочем положении полости первой группы гидронасосов соединяются с по. .остями гидроцилиндра по замкнутой схеме а вторая групU
0
5
0
0
S
па гидронасосов соединяется с бесштоковой полостью гидроцилиндра по разомкнутой схеме. Во втором положении гидроразъединителя обе полости гидроцилиндра заперты, а полости первой группы гидронасосов соединяются между собой через линии и золотник гидроразъединителя.
Работа устройства при включенном гидроразъединителе.
Схема соединения основных гидромащин, образующаяся при включении гидроразъединителя, изображена на фиг. 2. Там же стрелками показаны положительные направления потоков рабочей жидкости в элемеи- тзх гидросх емы и движения штока рабочего гидроцилиндра.
Блок б управления обеспечивает следующие зависимост л геометрических подач гидронасосов от величины сигналг блока 7 формирования команд.
Qi -KiU-|-Q -.i;(1)
+ Q...2,(2)
г.а.е Qi и Q2 - геометрические подачи соответственно первой и второй групп гидронасосов;
J- в.ыходной сигнал блока формирования команд; ,
Qo, - потоки смещения первой и второй групп гидронасосов; К и Кз - коэффициенты пропорциональ-.
ности.
Их соотношение выбираете.-; -ic- условию компенсации дифференциала раб - .его гидро- 1илиндра 11 следуЮ Цкм образо.-;:
J 2--K:( D-1),(3)
-где ,дифференциал гидроцилиндра
SBIII, Sn.-площади поршн.я со стороны бесштоковой и штоковой полостей гидроцилиндра. На фиг. 3 приведены зависимости Qi(U} и Q2(U) для случая 0 2.
Теоретически предлагаемое устройстве, содержащее замкнутый и разомкнутый гид равлические контур;-; (ф,нг. ) способно ционировать при
QoM ...2 0.(4;
, этом в соответствии с формулами (1)--(3)
Q1 К1 и,
Q2-K2U Ki(D-)U.(5)
Отсюда соотношение подач гидронасосов при Q.-4 Q,.,,, 0 определяется как
Q, (D--DQi(6)
Предположи.м, что . Как видно из схемы фиг. 2, геометрическая подача жидкости в бесштоковую полость гидроцилиндра 1 1
Q.H« Q,,-f (D-l)Qi DQ,.(7j Объем жидкости, вытесняемой из штоковой полости гидроцилиндра с дифференциалом , определяется формулой: Qiii D QBiu Q, (8) Эта величина в точности соответствует геометрической подаче первой группы гидронасосов 2, которая образует совместно с гидроцилиндром 1I замкнутый гидравлический . Соотношение (8) выполняется как при прямом (), так и при обратном (Vu.;0) ходах поршня.
Таким образом, при строгом выполнении отношения (6) подач гидронасос 3 обеспечивает идеальную -компенсацию дифференциала гидроцилиндра во всех режимах работы привода.
Однако практически абсолютно точно pea лйзовать соотношения (3) и (6) невозможно вследствие флюктуации параметров системы, утечек и перетечек жидкости в полостях гидромашин и ряда других случайных факторов. Поэтому реально при управлении гидронасосами по условиям (3) и (6) .;огут возникнуть две возможные ситуации:
Q2.(D-l)Qi+AQ.(9)
либо
Q2(D-1)Q,-AQ,(10)
где AQ - неконтролируемое приращение по- дачи.
В первой ситуации подача в бесштоко- вую аолость составит
Q6m Q, + Q2 DQi 4-AQ, а расход из штоковой полости гидроаилипдра
Q™ D- QBui Q,4-D- AQ.
В то же время связанная со штоковой ролостью гидроцилиндра 11 первая груп- -ia насосов церекачивает объем жидкости, гоответствук йий расходу . Следовательно, ситуация( 9) приводит к накоплению j верхней (фиг. 2) гидролинии избыточно- о объема рабочей жидкости и как следствие - к недопустимому повышению давления в полостях всех гидромашин даже ;ри работе привода на холостом ходу. По- 5тому ситуация (9) является недопустимой.
Во второй ситуации (10) .подача в бес- штоковую полость и расход из штоковой полости при прямом ходе поршня определяются, как
QBm Qi-fQ2 DQi -AQ; РШ Qi - .
Так как Qa,Qi, в верхней гидролинии создается дефицит рабочей жидкости, сопровождающийся понижением давления. Как только давление в этой лцнии оказывается ниже давления в линии подпитки, открывается подпиточный клапан 16. При этом указанный дефицит жидкости покрывается за счет автоматической подачи жидкости через клапан 16 из линии подпитки. Причем подача из линии подпитки Q,, Qi-Q,,, .
Вследствие открытия клапана 16 давление на входе первой группы гидронасосов 2 стабилизируется на уровне, соответствующем давлению в линии 14 подпитки, за вычетом падения дав.яения на открытом под- питочном клапане.
Таким обраг(ом, благодаря наличию под- питочных клапяноп ситуация (10) является
допустимой, так как она не приводит к нарушению работоспособности привода. Именно это обстояте-тьство принято во внимание при введении в предлагаемое устройство блока 6 управления.
Блок 6 обеспечивает такое смещение характеристик подач Qi(U) и РзС-) (фиг. 2). при котором искусственно создается ситуация (10).
Действительно, как следует из формул 10 (1) и (2), при создании потоков смещения Qc.| и соотнощение подач гидрс::2со- сов определяется выражением
Q2 rKr -K2(Ql-Q-l)+Q-2.
Выбирая Qc-, и Q.-.2
,5 -Qo...()
и учитывая условие (3), получаем выражение, аналогичное выражению (10):
Q2(D-HQi -DQ.-. В соответствии с формулами (I), (2) и (il) блок 6 управления может быть выпол- - кен в виде двух сумматоров и источника сигнала смещения, причем первые входы сумматоров объединены ме-жду собой и подклю- чены к входу блока, а вторые входы сумматоров подключены к источнику с| гнала 25 смещения таким образом, что на ...первом выходе блока смещения сигнал смещения суммируется, а на втором выходе вь чита- ется из входного сигнала.
На фиг. 4 показана развернутая схема соединения гидролиний и циркуляции пото- 0 ков рабочей жидкости при прямом ходе поршня () в двигательном режиме (когда ус.члие FC, приложенное к штоку гидроцилиндра 11 со стороны механизма, препятствует выдвижению штока). Как видно, эта схема аналогична схеме фиг. 3. Обе 5 группы гидронасосов работают на общую напорную гидролинию (показана утолщенно и обеспечивают подачу в бесштоковую полость гидроцилиндра жидкости в соответствии с формулой: 0Qr,u,Q, + Q2 D(Q,-Q.-).
Следов.ательно, здесь используется суммарная производительность насосов. Скорость движения штока:
Уш 5ьш РБШ Smu D (Q, - Qc-) S,7 (Ql -
- Qc-):S,7 KlU
5 пропорциональна командному сигналу U. Под действием тормозящего усилия FC в бес- штоковой (заштрихованной) полости гидроцилиндра, общей (показанной утолщенно) гидролинии и нагнетающих полостях гидронасосов создается соответствующее повы- ° шенное давление. Штоковая полость гидроцилиндра, верхняя гидролиния замкнутого контура и всасывающая полость первой группы гидронасосов оказываются под пониженным давлением. Расход жидкости на што ковой полости гидроцилиндра
Q; D Qbui (Q, -QCM)QI. Следовательно, расход жидкости, посту- из линии подпитки во всасываю
тую полость первой группы гидронасосов через под1 иточный клапан 16 {и частично через клапан 18), составляет
, QcH. .
Ми нмальное давление ВО всасывающей полости первой группы гидронасосов ограничивается давлением в линии подпитки. Флю- KTyaiUifl характеристик подач гидронасосов П1)иводит к изменению (увеличению или умеиьп ению} потока подпитки Qn. Работо- способность привода со ;раняется до тех пор, пока поток подпитки не уменьшается до нуля. Реально она обеспечивается соответствующим выбором потока смещения Qc«.
В том случае, если при одних и тех же расходах Qi и Qz происходит изм:енение на- правления действия на шток усилия со стороны механизма (Fc становится не тормозя- nuiM. а движущим усилием), привод автоматически переходит в тормозной режим. При этом (фиг. 5) штоковая полость гидроцилиндра, связанная с ней гидролиния (показана утолщенно) и верхняя полость первой группы гидронасосов оказываются под повьнленным да 5;1ением, что приводит к закрытию подпи- точных клапанов 6 и 8. Гидроцилиндр 1 переходит в режим гидронасоса, а первая группа гидронасосов - в режим гидродвигателя, отдающего энергию первичному электрическому двигателю и далее в электрическую сеть. Расход жидкости, вытесняемой из ггокопой полости гидроцилиндра в верх- - ою (uanofJHyio) гидролинию:
Q-.-QI.
Окорость движения щтока
У:„ .- ЗиГ Q I 3,7 к, и 4- S,r Qc«
л этом режиме возрастает на величину, рав- ь:ую Sr Q.. Количество жидкости, всасываемой в бесштоковую полост ь гидроци- липдра, определяется как
,:, DQi.
В то же время подача жидкости в эту по.1ость от гидронасосов равна
QI + Q, D (Qi -QCH) Q3iii. Вследствие дефи.цита рабочей жидкости в этой части гидросхемы происходит уменьшение давления, приводяи.1ее к автоматическому открытию подпиточных клапанов 5 и 17. После открытия этих клапанов падение ;1авления прекращается. Расход жидкое- 1И из линии подпитки составляет
Q QM,I- (Qi-f Q2)DQo,. Поскольку обе полости гидронасоса 3 от- к 1ываются под пониженным давлением, эта группа работает в режиме холостого хода. Гидронасосы 2 совместно с первичным элект- ричееким двигателем обеспечивают рекупе- раплю энергии механизма в электрическую сеть, т. е. обеспечивает экономический тор- мо.чпой режим привода и регулирование ско- jKJCTH ii эгом режиме за счет изменения Q.
Обратный ход 1НТОКЛ обеспечивается пу- it M ги-иерснрования подач гидронасосов. Схе м|)1 с(М линония г идролиник и гч.ркуляции по- ижси 11пв(М1гй жидкости в чеягательном
5
; ,
0 .-,
5
о
5
и тормозном режимах показаны на фиг. б и 7. Вид режима определяется направлением действия усилия F. Если усилие Р является тормозящим (фиг. 6), привод работает 3 двигательном режиме. Первая группа гидронасосов,, подающая жидкость в пиоковую полость гидроцилиндра, несет полезную нагрузку; вторая группа гидронасосов, обеспечивающая деление потока жидкости из бес- ш гоковой полости, работает в режиме холостого хода. Благодаря смещению характеоис- тик подачи открывается подпиточный клапан 15, что обеспечивает работу привода в безопасном режиме. Скорость движения щтока регулируется путем изменения подачи Qi.
V,,, .- S,7 QI S,7 КI и -f S,7 Qc«.
Расход из линии подпитки Q, -DQc..
Рг-чи Езо врелля обратного хода п г. скн уси- Л1 Ч: является движу1Г,И,-; (что хз 1гктерно, маггркмер, для режимов опускания груженного ковша), привод работает в тормозном режиме. При этом (фиг. 7) обе группы гидронасосов работают в режиме гидродвигателей и обеспечивают рекуперацию энергии через перв-.чн..;й .двигатель 1 в сеть. Скорость .цвижгии-. штока определяется суммарной подачей (расходом) гидронасосов:
V,,, -- Зин (QI + Qz) S.7 (QI - Q.«) 5„7 х xKiU.
Благодаря смещению характер стик подачи автоматически открывается подпи- очнын клапан 15, сйеспечивающик .пас- режим привода. Расход из л1-л-1 ;;, под- -ктки составляет Q),.
Наибольший положительный даст применение предлагаемого устройства для привода механизмов с потенциальной нагрузкой (механизмов подъема стрелы, рукояти, поворота ковща и т. д.). Причем в зависимости от нагрузки при опускании ковша привод автоматически, без вмешательства оператора пе)еход;гг либо в режим си- jiOBord спуска, либо тормозного спуска с заданной скоростью и релупереаней энергии. Это значительно облегчает работу оператора и создает условия для повыщения надежности, .экономичности и производительности экскаватора.
Рассмотрим работу привода при стопоре- пии механиз.ма, которое обеспечивается при ij.:0. Схема соединения гидролиний показана на фиг. 8. Благодаря смешению характеристик (формулы 1 и 2) при .и 0 гидронасосы работают с подачей
д,,,д„,
Q2..Qc,,.(12)
при этом в гидросистеме создается поток смещ.ения. Жидкость, забираемая из бака 21 насосом 12 подпитки, проходит (за вычетом потока через сливной клапан 13) через питочный клапан 16, полости гидронасосов 2 и 3 и снова возвращается в бак. Введение обеспечиваюц1его данный поток блока 6 управления подачи создает положительный
эффект не. только в рабочих режимах i.epe мещения штока, но и во время пауз рабо ты механизма. Он заключается в том, что поток смещения обеспечивает непрерывное обновление рабочей жидкости в полостях гид помашин и cno jo6cTByeT улучшению их охлаждения.
При строгом соблюдении условия (12) и при теоретически обеспечиваются условия стопорения (фиксации) механизма как при выключенном, так и при включенном гидроразъединителе 8 либо вовсе без него. Действительно, суммарная подача гидронасосов 2 и 3 в бесштоковую полость гидроцилиндра II равна:
QMn Q,.4+Q.-2 0.
Сле,.-..овательнр
Vin SBlllQbill : 0.
Одна:;о, при клапан 16 iaasfpa;- - :л к создзготся условия для вытеснения жк;-.- кости из бесштоковой полости гидроцилинд- :-а в полость насоса 2. При этом происх-. Д гг выдвижение (самоход) штока со ск;:- ;/сстью
t,,, S,7 Q,,,S.- Q, 5,7 Qc.,
Подача жидкости в бесштоковую полость происходит через клапан 15. Кроме того, в условиях флюктуации параметров гидронасосов и их регулируюш,их органов строгое соблюдение условия (12) реально невозможно. Поэтому суммарная подача гидронасосов в бесштоковую полость гидроцилинд- рз может оказаться не равной нулю. Это фиводит к появлению самохода не только фи , но и при .
Для устранения указанного недостатка в устройство введен гидроразъединитель . 8, который при нулевом командном сигнале () по сигналу нуль-органа 10 запирает полости гидроцилиндра 11 и обеспечивает надежную фиксацию механизма независимо от нагрузки и флюктуации параметров гидронасосов. Кроме того, такое решение, отсутствующее в схеме известного устройства, обеспечивает разгрузку полостей гидронасосов от давления, обусловленного усилием на штоке со стороны механизма. В итоге снижаются потери энергии в системе. Помимо размыкания основного гидравлического контура гидроразъединитель соединяет между собой полости первой группы гидронасосов. Это обеспечивает безопасный режим функционнропания гидронасосов при неточной реализации условия (12).
Устройство обеспечивает также возможность улучшенною использования установленной мощности гидронасосов 2 и 3 к приводного двигягеля 1 для управления не одним, а несколькими механизмами экскаватора. На фиг. 10 приведена схема, обес15
5
печиваюцдая поочередное упргшлснио .мя механизмами. Для управления механизмом устройство дополняется вторым .:дроцилиндром 22, г 1дроразьели11ителем 23 5 с приводом 24, нуль-органом 25, гяорым блоком 26 формирования команд, а также блоком 27 переключения. Гидроразъсл п ители 8 и 23 включены в замкну г,..и ; ;; :;),чвличсс- кий контур последовательно. Входы блока 27 переключения соединень; с В1л1холзми О блока 7 формирования команд (управления первым механизмом) н 26 (управ.1ен; л вторым механизмом), а также с выходами нуль- органов 10 и 25. Выходы блока 27 ггереклю- чения соединены с- входами нуль-органов 10 и 25 и с входом блока б упран.:1ения. Устройство работает следующим .-)и;.:)зом. iipH наличии командного сигнала для уп раеления псм)вым механизмом {Ui 0, IJ2 ) блок 27 переключения обеспечивает подачу сигнала Ui на вход блока б управления () и на вход нуль-органа iO. При этом включается гидроразъединитель 8, благодаря чему обеспечивается упраиленне гндроцилиндром II от блока 7 формирования команд по ранее описанной схеме. Поступающий на вход блока 27 выходной сигнал нуль-органа 0 блокирует передачу второго командного сигнала (Ь я) на выходы блока 27 переключения. Благодаря этому даже при гндроразъединнтель 23 выключен, что обеспечивает режим стояорения гидроцилиндра 22 привода второго механизма.
В том случае, er,:iM IJ 0, а lJj-- 0, блс:-. 27 переключения обеспечивает подачу ом- нала Uz на вход блока б управления нуль-органа 25. Выходной сигнал нуль-ор
гена 25 блокирует прохождение сигнала L-,- до тех пор, пока U2 не станет рапным нулю. В результате этого гидроразъединитель 8 оказывается выключенным и обеспечивает режим стопорения первого механизма. Гил- роразъединитель 23 подключает гндроцгь
0 линдр 22 к гидронасосам 2 и 3, благодаря чему создаются условия для управления вторым механизмом с помощью второго блока 26 формирования команд по ранее описанной схеме.
При Ui 0 и U-2 0 оба механиз.ма работают в режиме стопорения (гидроразъединители 8 и 23 выключены), причем полости гидронасоса 2 соединяются между собой через последовательно соедпненнь 1е линии гидроразъединителей 8 и 23.
Таким образом, положительный эффект заключается в белее рациональном использовании установленной мощности гидромашин и приводного электрического двигателя и в итоге - в уменьшении габаритов рабочего оборудования экскаватора.
0
5
1
1J
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1991 |
|
RU2017903C1 |
| Механизм регулирования гидронасоса гидрообъемной передачи сельскохозяйственной машины | 1989 |
|
SU1710374A1 |
| Гидравлический механизм подачи очистного комбайна | 1987 |
|
SU1469131A1 |
| Объединенная гидросистема рулевого механизма и рабочего оборудования транспортного средства | 1986 |
|
SU1342802A1 |
| Устройство для спуска и подъема скважинных приборов | 1991 |
|
SU1800013A1 |
| Зажимное устройство | 1986 |
|
SU1324803A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА УСТРОЙСТВА ПЕРЕДАЧИ ДАВЛЕНИЯ СРЕДЫ ОТ ОДНОЙ СИСТЕМЫ К ДРУГОЙ БЕЗ СОПРИКОСНОВЕНИЯ СРЕД | 2008 |
|
RU2357107C1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| Гидрофицированный протяжной станок | 1985 |
|
SU1289627A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ЦЕНТРАЦИИ ГИДРОПРИВОДА УСТРОЙСТВА ПЕРЕДАЧИ ДАВЛЕНИЯ СРЕДЫ ОТ ОДНОЙ СИСТЕМЫ К ДРУГОЙ БЕЗ СОПРИКОСНОВЕНИЯ СРЕД | 2008 |
|
RU2357108C1 |

Ws t..
t..
Фие2
Г
Чп
2
| Бериман И | |||
| Л, и др | |||
| Одноковшовые экскаваторы и самоходные краны с гидравлическим приводом | |||
| М.: Машиностроение, 1971 | |||
| Журнал «Hydraulies а Pneumaties, 1969, т | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
