выходного сигнала третьего широтно- преобразователя, где он суммируется
импульсного преобразователя на второй вход nepBoro импульсно-фазового
1273875
с сигналом задания, компенсируя ошибку, возникающую из-за наличия люфта. I ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| Электропривод | 1987 |
|
SU1434532A1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1359879A1 |
Изобретение относится к области горнодобывающей техники и может найти широкое применение в системах управления рабочими органами экскаваторов и врубовых машин. Целью изобретения является повышение точности и расширение устойчивости электропривода. Для этого в нем установлены два фазовых датчика перемещения,валы которых кинематически связаны с входным и выходным валами редуктора, и которые запитаны от разных источ- НИКОВ переменного напряжения. Их выходные сигналы поступают на первые входы двух фазовых дискриминаторов, на вторые входы которых поступает сигнал задания, сформированный в виде импульсов унитарного кода и преобразованный в соответствующих импульсно-фазовых преобразователях. Выходной сигнал первого дискриминатора через регулирующий блок воздействует на исполнительный механизм. Кроме Того, выходные сигналы дискриминаторов поступают на входы соответствующих формирователей импульсов, которые предназначены для синхронизации разночастотных импульсных последовательностей и которые пропускают на свои выходы без изменения только К-е импульсы входных последовательностей импульсов, где К - наибольший общий делитель частот напряжений питания двух датчиков перемещения. Выходные сигналы формирователей преобразуются в соответствующих широтно-импульсных преобразователях и поступают соответственно на суммнрующие и вычитающие входы компаратора и интегратора. Вьпсодной сигнал с S интегратора поступает на вход третьего фазового дискриминатора, в котосл ром сравнивается по фазе с напряжением питания второго датчика положения. Результат сравнения поступает на вход делителя частоты, а также преобразуется в третьем широтно-импульсном преобразователе и поступает на первый вход элемента И. Если разность входных сигналов компаратора кэ превышает заданный порог, то он формирует .на своем выходе разрешающий 00 00 сигнал, который поступает на второй вход элемента И. Делитель частоты формирует на своих- двух выходах две СП последовательности противоположных по фазе импульсов, частота следования которых в п раз меньше частоты его входного сигнала. Одна из последовательностей поступает на входы Сброс компаратора и интегратора и определяет цикличность работы канала компенсации люфта, а вторая поступает на третий вход элемента И и в совокупности с разрешающим сигналом компаратора разрешает прохождение
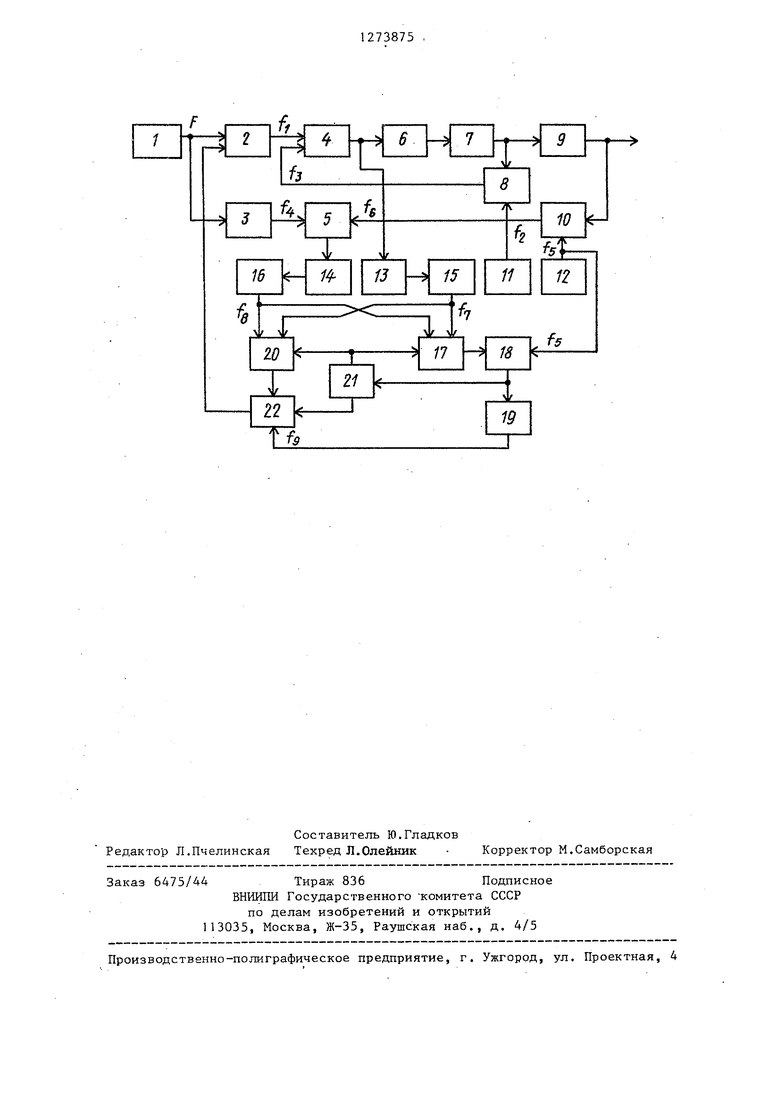
Изобретение относится к горнодобывающей и металлообрабатывающей тех нике и может быть применено в системах управления рабочими органами экскаваторов и врубовых машин, в сие темах программного управления фрезерными станками и, кроме того, в системах программного управления кар диографами. Цель изобретения - повышение точности и расширение области устойчивости электропривода. На чертеже приведена функциональная схема электропривода. Электропривод содержит задатчик 1, первый 2 и второй 3 импульснофазовые преобразователи, первый 4 и второй 5 фазовые дискриминаторы, регулирующий блок 6, исполнительный двигатель 7, первый фазовый датчик положения, редуктор 9, второй фазовы датчик 10 положения, первый 11 и второй 12 частотные генераторы, первый 13 и второй 14 формирователи им пульсов, первьй 15 и второй 16 широ но-импульсные преобразователи, интегратор 17, третий фазовый дискриминатор 18, третий широтно-импульсный преобразователь 19, компаратор 20, делитель 21 частоты и элемент И 22. На чертеже приняты обозначения: F - частота следования импульсов ун тарного кода на выходе задатчика 1; f. , f j - частоты следования импульсов прямоугольной формы на выходах импульсно-фазового преобразователя 2 и фазового датчика 8 положения со ответственно; , fg - частоты следования импульсов прямоугольной формы на выходах импульсно-фазового преобразователя 3 и фазового датчик 10 положения соответственно; f ,f частоты сигналов на выходах частотных генераторов II и 12 соот;ветстве но; f7) fg - частоты следования импульсов унитарного кода на выходах широтно-импульсных преобразователей 15 и 16; f - частота следования импульсов на выходе широтно-импульсного преобразователя 19. Компаратор 20 может быть выполнен в виде последовательно соединенных реверсивного счетчика, дешифратора и триггера. Привод работает следунлцим образом. При отсутствии задающего воздействия, т.е. при , фаза прямоугольных импульсов, поступающих с выхода первого импульсно-фазового преобразователя 2 на первый вход фазового дискриминатора 4, совпадает с фазой импульсов на выходе фазового датчика 8 положенияj поступающих на второй вход первого фазового дискриминатора 4. Частоты следования импульсов, поступающих -на оба входа фазового дискриминатора 4, равны между собой и частоте напряжения, поступающего на электрический вход фазового датчика 8 положения с выхода первого частотного генератора 11, т.е. Г(. В этом случае сигнал на выходе фазового дискриминатора 4 равен нулю. Фазы прямоугольных импульсов, поступающих на входы фазового дискриминатора 5 с выходов импульсно-фазового преобразователя 3 и фазового датчика 10 положения также совпадают. Частоты следования указанных выше импульсов равны между собой и частоте напряжения, поступающего на электрический вход второго фазового датчика 10 положения с выхода частотного генератора 12, т,е. f Сигнал на выходе второго фазового дискриминатора 5 также равен нулю. Электропривод находится в состоянии покоя. Если электропривод должен отработать некоторое заданное перемещение, то с выхода задатчика 1 на первый 3 вход импульсно-фазового преобразова теля 2 подаются импульсы унитарного кода (т.е. ), частота следования которых.пропорциональ на заданной скорости, а количество - величине заданного перемещения. В результате этого изменяются фаза и частота сле дования прямоугольных импульсов на выходе импульсно-фазового преобразо вателя 1. Изменение частоты следова ния импульсов пропорционально задан ной скорости вращения.вала исполнительного двигателя 7, а изменение ф зы импульсов относительно фазы напр жения на выходе первого частотного гекзратора, имеющего частоту fj и питающего первый фазовый датчик положения 8, пропорционально заданному углу поворота вала исполнительно го двигателя 7, Импульсы с .выхода и пульсно-фазового преобразователя 2 поступают на первый вход фазового дискриминатора 4, на второй вход ко торого поступают импульсы с выхода фазового датчика 8 положения. Девиа ция частоты следования указанных выше импульсов пропорциональна факти ческой скорости вращения вала испол нительного двигателя 7, а фаза указанных импульсов относительно фазы напряжения на выходе первого частотного генератора 11 пропорциональна фактическому углу поворота вала исполнительного двигателя 7. В зависимости от знака разности фаз импульсов, поступающих на входы фазового дискриминатора А, на его выходе формируются прямоугольные импульсы ширина которых пропорциональна сигналу рассогласования между заданным и действительным положениями вала исполнительного двигателя 7, Эти импульсы поступают на вход регулирующего блока 6, который преобразует их в соответствии с заложенным в нем законом регулирования и воздействует на исполнительный двигатель 7 так, чтобы уменьшить величину сигнала рассогласования между заданным и действительным положениями вала исполнительного двигателя 7. Кроме того, импульсы унитарного кода Р с выхода задатчика 1 подают.ся также на вход импульсно-фазового преобразователя 3. В результате этого изменяется частота f следования прямоугольных импульсов на его выходе . Девиация этой частоты пропорциональна заданной скорости переме 754щения выходного вала peдyкJopa 9, а изменение фазы указанных импульсов относительно фазы напряжения с частотой fj5 , которое формируется на выходе второго частотного генератора 12 и является напряжением питания частотного датчика 10 положения,пропорционально заданному перемещению выходного вала редуктора 9. Прямоугольные импульсы с выхода импульсно-фазового преобразователя 3 подаются на первый вход второго фазового дискриминатора 5. На второй вход этого дискриминатора подаются |Прямоугольные импульсы с выхода фазового датчика 10 положения. Девиация частоты fg следования импульсов на выходе фазового датчика 10 положения пропорциональна фактической скорости перемещения выходного вала редуктора 9, а изменение их фазы относительно фазы напряжения, питающег о фазовый датчик 10 положения, пропорционально фактическому перемещению выходного вала редуктора 9. В зависимости от величины и знака разности фаз импульсов, поступающих на входы второго фазового дискриминатора 5, на его выходе формируются прямоугольные импульсы, щирина которых пропорциональна величине рассогласования меаду заданньтм и действительным положениями выходного вала редуктора 9. Импульсы с выхода первого фазового дискриминатора 4 подаются также на вход формирователя 13 импульсов, а импульсы с выхода фазового дискриминатора 5 подаются на.вход второго формирователя 14 импульсов. Первый формирователь 13 импульсов пропускает без изменения на свой выход каждый f, /К-й импульс из по- . следовательности импульсов, поступающей на его вход, а второй формирователь 14 импульсов пропускает без изменения-на свой-выход каждый fg/К-й импульс из последовательности импульсов, поступающей на его вход, где К - наибольпшй общий делитель частот напряжений на выходах ервого и второго частотных генераоров 11 и 12, В результате указаных операций производится синхрониация импульсов двух разночастотых последовательностей. Выходные импульсы формирователя 13 импульсов поступают на вход шиотно-импульсного преобразователя
15, который формирует на своем выходе пачки импульсов унитарного кода с частотой следования fj, , причем количество импульсов в каждой пачке пропорционально ширине соответствующего импульса на входе этого преобразователя, т.е. пропорционально сигналу рассогласования между заданным и текущим положениями вала исполнительного двигателя 7.
Выходные импульсы формирователя 14 импульсов поступают на широтноимпульсный преобразователь 16, который формирует на своем выходе пачки импульсов унитарного кода с частотой следования fo . Количество импульо
СОВ В каждой пачке пропорционально ширине соответствующего импульса на входе этого преобразователя, т,е, пропорционально сигналу рассогласования между заданным и текущим положениями выходного вала редуктора 9. Импульсы унитарного кода с выходов широтно-импульсных преобразователей 15 и 16 подаются на суммирующий и вычитающий входы интегратора 17 типа импульсно-фазового дискриминатора с периодическим обнулением его счетчика (на чертеже не показан) Интегратор 17 накапливает алгебраическую разность импульсов, поступающих на его входы.
Так как сигнал рассогласования между текущим и заданным положениями вала исполнительного двигателя 7 отличается от сигнала рассогласования между текущим и заданным положениями выходного вала редуктора 9 на величину люфта в редукторе 9, то разность импульсов, накапливаемая интегратором 17 в течение заданного времени, пропорциональна погрещности слежения, обусловленной наличием люфта в редукторе 9. Эта ошибка выражается в виде из.менения фазы прямоугольных импульсов на выходе .интегратора 17 относительно фазы напряжения на выходе частотного генератора 12. Выходные импульсы интегратора 17 подаются на первый вход фазового дискриминатора 18. На второй вход третьего фазового дискриминатора подаются прямоугольные импульсы частота которых пропорциональна частоте напряжения на выходе второго частотного генератора 12.
В зависимости от соотношения фаз импульсов на входах фазового дискриминатора 18 на его выходе формируются импульсы прямоугольной формы, ширина которых пропорциональна ошибке слежения электропривода, обусловленной наличием люфта реду1стора 9.
Импульсы с выхода широтйо-импульсного преобразователя 19 подаются на третий вход элемента И 22, Импульсы унитарного кода с выходов широтноимпульсных преобразователей 15 и 16 также поступают на суммирующие и вычитающие входы компаратора 20. Если разность числа этих импульсов достигает порога срабатывания компаратора, то на его выходе формируется разрещакщий сигнал, который поступает на первый вход элемента И.
Выходной сигнал фазового дискриминатора 18 поступает -также на вход делителя 21 импульсов частоты, на выходах которого формируются импульсы, которые находятся в противофазе и частоты которых равны частоте импульсной последовательности на выходе третьего фазового дискриминатора, деленной на К (где К - коэффициент деления делителя 21 частоты). В некоторый, момент времени, определяемый коэффициентом деления делителя частоты 21 и частотой сигнала на выходе фазового дискриминатора 18, делитель 21 частоты формирует на своем втором выходе разрешающий импульс, длительность которого больше длительности пачки импульсов на выходе широтно-импульсного преобразователя 19, но меньше периода следования этих пачек, и подает этот импуль на второй вход элемента Е 22.
При наличии разрешающих импульсов на первом и ззтором входах элемента И 22 пачка импульсов с его третьего входа проходит на его выхЪд и далее на второй вход первого импульсно-фазового преобразователя 2. Эти импульсы суммируются с импульсами задающего воздействия, если выходной вал редуктора 9 и связанный с ним рабочий орган (на чертеже не показан) отстают от заданного положения, и вычитаются из импульсной последовательности задающего воздействия,если он опережает задающее воздействие Электропривод соответствующим обрааом отработает скоректированное указанным образом задающее воздействие. Погрешность слежения, обусловленная наличием люфта в редукторе 9, компенсируется. После окончания такта компенсации делитель 21 частоты формирует и подает на входы Сброс интегратора 17 и компаратора 20 импульс, которы устанавливает их в исходное состояние. После окончания действия указа ного импульса начинается новый такт компенсации погрешности .слежения, обусловленный наличием люфта в редукторе 9. Компаратор 20 защищает канал ком пенсации люфта от возникновения в нем колебаний с малой амплитудой, обусловленных флюктуациями преобразований сигналов в блоках электропривода. Порог срабатывания компара тора выбирается из условия обеспече ния заданной точности компенсации составляющей погрешности слежения, обусловленной наличием люфт-а в реду торе 9. Таким образом, в предлагаемом электроприводе воспроизведение зада ющего воздействия осуществляется за счет постоянного функционирования безлюфтовой обратной связи по положению вала исполнительного двигателя 9, а погрешность слежения, обусловленная люфтом в редукторе 9, компенсируется периодически при достижении указанной погрешностью недопустимой величины. При этом время компенсации мало по сравнению с вре менем регулирования. В результате ЭТОГО- в данном приводе повышена точ и расширена область устойчиво Формула изобретени Следящий электропривод с компенсацией люфта, содержащий задатчик и последовательно соединенные первый импульсно-фазовый преобразователь, первый фазовый дискриминатор, регулирующий блок, исполнительный двитатель и редуктор, входной и выходной валы которого соединены с валами соответственно первого и второго .фазовых датчиков положения,, подключенных электрическими входами к выходам соответственно первого и второго частотных генераторов, а выходами - к вторым входам соответственно первого и второго фазовых дискриминаторов, причем первый вход второго фазового дискриминатора соединен с выходом второго импульсно-фазового преобразователя, подключенного входом к первому входу первого импульсно-фазового преобразователя, о тличающийс я тем, что, с целью повышения точности и расширения области устойчивости привода, в нем дополнительно установлены первый, второй и. третий широтно-импульсные преобразователи, интегратор,компаратор, элемент И, делитель частоты, третий фазовый дискриминатор и первый и второй формирователи импульсов , соединенные входами с выходами соответственно первого и второго фазовых дискриминаторов, а выходами с входами соответственно первого и второго широтно-импульсных преобразователей, подключенных выходами соответственно к суммируюшд-iM и вычитающим входам интегратора и компаратора, соединенного входом Сброс с входом Сброс интегратора и с первым выходом делителя частоты, а выходом - с первым входом элемента И, подключенного выходом к второму входу первого импульсно-фазового преобразователя, а вторым и третьим входами соответственно к второму выходу делителя частоты и к выходу третьего широтно-импульсного преобразователя, соединенного входом с входом делителя частоты и выходом третьего фазового дискриминатора, соединенного входами с выходами интегратора и второго частотного гене ратора, выход задатчика подключен к первому входу первого импульсно-фазового преобразователя.
| ИНТЕГРИРУЮЩИЙ ПРИВОД | 0 |
|
SU334556A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
