значении тока двигателя (Д)1, При частоте выше граничной Б.У 11 подключает ЭС 15 к выходу регулятора напряжения 5, при этом наступает режим подчиненного регулирования тока. Одновременно БУ 11 увеличивает интенсивность изменения частоты и модуля выходного напряжения на выходе за- датчика интенсивности 8. При перегрузке Д1 ток с датчика тока f превышает максимально допустимое значение, заданное ИОС 12. Сигнал на выходе ЭС 14 и порогового элемента 16 уменьшает частоту вращения Д 1 до исчезновения перегрузки. При неисчезноИзобретение относится к электротехнике, а именно к способам управления электроприводом, выполненным по системе преобразователь частоты - асинхронный электродвигатель с беста- хогенераторным исполнением, регулированием частоты вращения путем изменения частоты преобразователя частоты и поддержания постоянным пото- . косцепления с помощью регуляторов напряжения и тока, и может применяться н электроприводах металлоружещих станков, выемочных машин, камнерезных машин и т.д..
Цель изобр етения - повышение на- дежности электродвигателя и его производительности -путем исключения пов- торньпс стопорных режимов работы электродвигателя ,
На чертеже изображена, функциональная схема устройства, реализующего способ частотного управления электродвигателем.
Устройство содержит асинхронный электродвигатель 1, подключенный к преобразрвате лю 2 частоты через датчики напряжения 3 и тока 4, регуляторы напряжения 5, тока 6 и частоты 7, связанные с преобразователем 2 частоты, задатчик 8 интенсивности, соединенный по входу с блока 9 реверса, блок 10 контроля тока при реверсе, выход которого соединен с блоком 11 управления, имеющим три вы- ,хода, два из которых соединены с завении перегрузки частота вращения Д 1. снижается до нуля, сигнал на ЭС 17 такде равен нулю. БУ 11 выдает в блок реверса (БР) 9 сигнал, приводящий к изменению знака задания в БР 9 При этом происходит пуск Д 1 в противоположном .направлении, чем устраняется стопорение привода, .Введение операции повторного пуска Д 1 после снижения тока до уровня 0,3-0,5 номинального тока ЭС с одновременным снижением интенсивности изменения частоты по сравнению с начальной исключает повторные стопорньш режи.- мы работы, I ил.
датчиком 8 интенсивности и блоком 9 реверса, источник 12 опорных напряжений, один выход которого соединен с первым входом переключателя 13, второй вход которого подключен к третьему выходу блока 11 управления, а третий - к регулятору 5 напряжения. Датчик 4 тока выходом подключен к элементам 14 и 15 сравнения, вторые
входы которых соответственно соединены с вторым выходом источника 12 опорных сигналов и выходом переключателя 13, а выходы - с пороговым элементом 16 и регулятором 6 тока.
Выходы порогового элемента 16 и датчика 3 напряжения соединены соответственно с элементами 17 и 18 сравнения, включенными последовательно, при этом общая их точка соединена с
входом блока 11 управления. Выходы задатчика 8 интенсивности и элемента 18 сравнения соединены соответственно с входами элемента 17 сравнения и регулятора 5 напряжения. Кроме того,
в.ыход элемента 18 сравнения соединен с входом регулятора 7 частоты.
Устройство, реализующее предлагае- мый способ, работает следующим образом.
в начальный момент пуска блок 11 управления с помощью переключателя 13 подключает вход элемента 15 сравне- ния к источнику 12 опорных сигна- лов. Тем самым устанавливается зада,ние по току и начало пуска, от ну
31
ля до граничной частоты, осуществляется при заданном неизменном значении тока электродвигателя 1, При частоте вьте граничной блок 11 управления подключает вход элемента 15 срав- нения к выходу регулятора 5 напряжения и устройство переходит от режима регулирования тока электродвигателя I к режиму регулирования напряжения с подчиненным регулирование}- то- ка. Одновременно сигнал с блока II управления увеличивает интенсивность изменения частоты -и модуля выходного напряжения на выходе задатчика 8 интенсивности. По окончании пуска час- тота вращения электродвигателя I определяется сигналом задания U- .
При перегрузке электродвигателя 1 ток, снимаемый с датчика 4 тока, начинает превьппать максимально допустимое значение, заданное источником 12 опорных сигналов, Появляется сигнал на выходе элемента 14 сравнения и порогового элемента 16, который, вы- читаясь в элементе 17 сравнения из задающего сигнала, уменьшает частоту вращения электродвигателя I, Частота вращения снижается до тех пор, пока не исчезнет перегрузка электродвигателя 1. В том случае, когда перегрузка не исчезает, что имеет место, например, при стопорении органа резания, частота вращения электродвигателя 1 снижается до нуля, При этом сигнал на выходе элемента 17 сравнения ста- носится близким к нулю. Блок 11 управления вьщает в блок 9 реверса сиг- нап, прив.одя щий к изменению знака задания в блоке 9 реверса. При этом происходит пуск электродвигателя 1 -в противоположном направлении, тем самым устраняются условия стопорения исполнительного органа привода. Во время реверса электродвигателя 1 блок 10 контроля тока при реверсе, при снижении тока электродвигателя менее 0,3-0,5 номинального тока двигателя выдает сигнал в блок 11 управления, который в свою очередь осуществляет в блоке 9 реверса измене- ние знака Uj на противоположный. Происходит остановка электродвигатег ля 1 и его частотный пуск в прямом
ВНИИПИ Заказ 3608/51
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
0
5
5 О 5
3894
направлении. Одновременно блок 1I управления воздействует на задатчик
. 8 интенсивности, уменьшая интенсивность изменения частоты и модуля выходного напряжения преобразователя 2,
Таким образом,.предлагаемый способ частотного управления асинхронным электродвигателем повышает надежность электропривода, путем исключения повторных стопорных режимов его работы.
Формула изобретения
Способ, частотного управления асинхронным электродвигателем электропривода механизма режущего инструмента, при котором начальный путь от нуля до граничной частоты вращения осуществляют при неизменной величине тока и с заданной первоначальной интенсивностью изменения частоты питания, по достижению граничной частоты вращения переходят на режим регулирования напряжения с подчиненным регулированием тока и одновременно увеличивают интенсивность изменения частоты напряжения питания, контролируют достижение электродвигателем заданной частоты вращения и по ее достижению сравнивают ток электродвигателя с максимально допустимым и, если ток электродвигателя больще максимально допустимого, то снижают частотувраще- ния до нуля и осуществляют повторный . пуск, отличающийся тем, что, с целью повышения надежности электродвигателя и его производительности путем исключения повторных стопорных режимов электродвигателя, после снижения частоты вращения до нуля в случае превышения током двигателя максимально допустимого значения осуществляют реверс электродвигателя, контролируют ток электродвигателя во время реверса и после снижения тока до уровня, равного 0,3-0,5 номинального тока электродвигателя, осуществляют повторный пуск электродвигателя при той же величине тока, что и лри , началы|ом пуске, с одновременным снижением интенсивности изменения частоты по сравнению с начальной,
Тираж 631
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ частотного управления асинхронным электродвигателем электропривода механизма режущего инструмента | 1988 |
|
SU1624652A2 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Электропривод лифта | 1979 |
|
SU889585A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к электротехнике , а именно к способам управ- ,ления электроприводом. Цель изобретения - повышение надежности и производительности. Устройство, реализующее способ, в начальный момент пуска подключает блок управления (БУ) 11 с помощью переключателя 13 и элемент сравнения (ЭС) 15 к источнику опорных сигналов - (ИОС) 12, чем устанавливается задание по току и начало пуска до граничной частоты при неизменном с -т 00 00 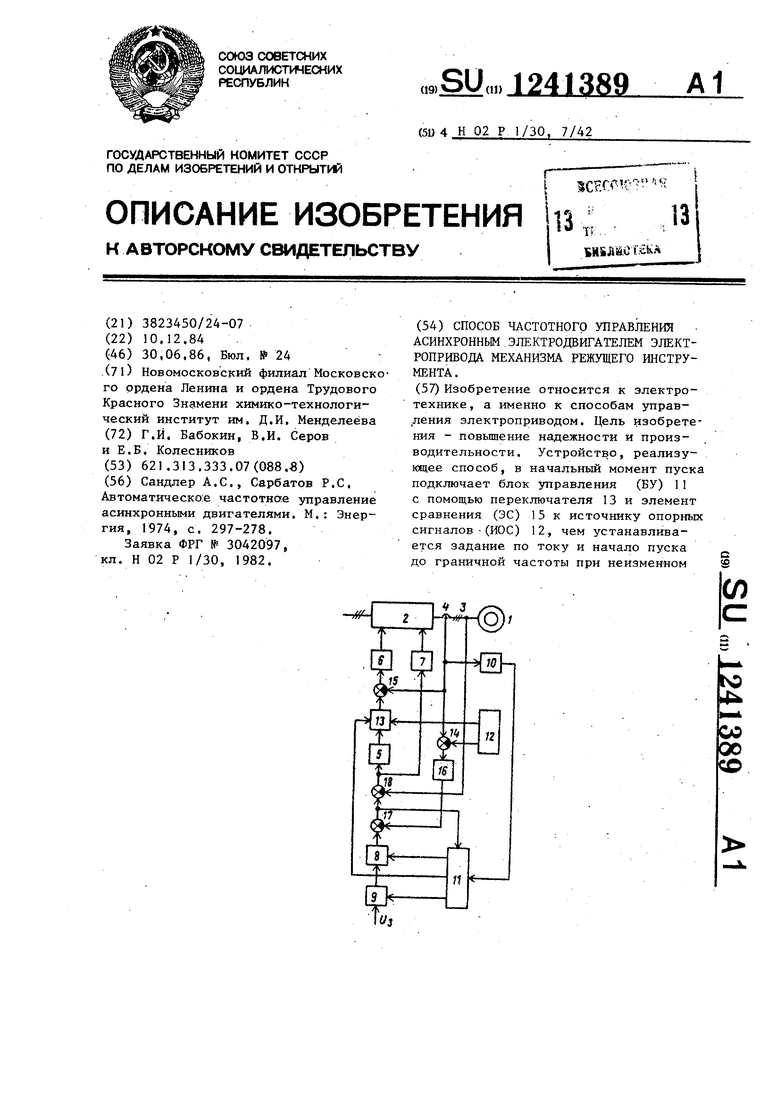
| Сандлер А.С., Сарбатов Р.С | |||
| Автоматическо:е частотное управление асинхронными двигателями | |||
| М.: Энергия, 1974, с | |||
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ УГЛЯ К ТОПКАМ | 1920 |
|
SU297A1 |
| Заявка ФРГ № 3042097, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
