1
Изобретение относится к роб -- 0технике и может быть использовано при поетрое- нни промышленных роботов-манипуляторов.
llcjb изобретения -- новьиисни е точности системы.
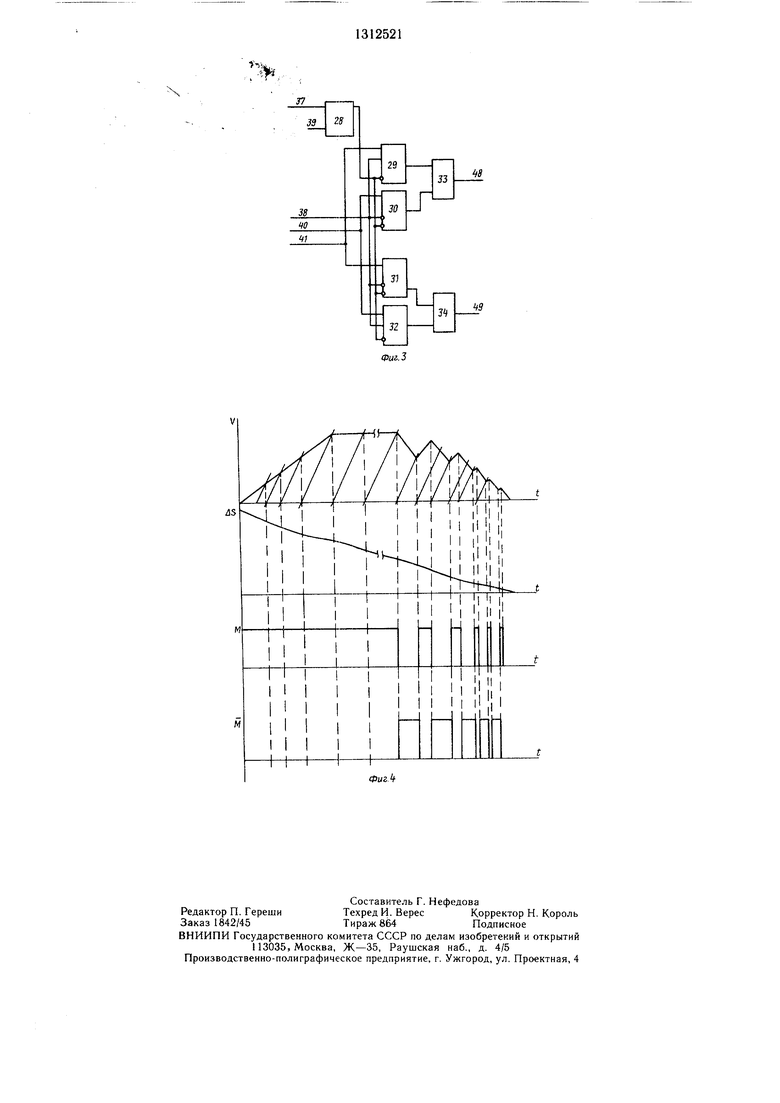
На фиг. 1 представлена функниональная схема системы; на фиг. 2 - функциональная с.хема блока поиска начала позиционирования; на фиг. 3 - функциональная схема формирователя сигнала управ- ления; на фиг. 4 - линейные диаграммы, поясняюпдие работу блока поиска начала позиционирования.
Система содержит задатчик 1, блок 2 сравнения, формирователь 3 сигнала управ- ления, первый источник 4 постоянного сигнала, первый ключ 5, второй источник 6 постоянного сигнала, второй ключ 7, регулятор 8 тока, усилитель 9 мощности, электродвигатель 10, рабочий механизм 1, датчик 12 положения, датчик 13 скорости, согласующий преобразователь 14, блок 15 выбора начала позиционирования, третий источник 16 постоянного сигнала, первый интегратор 17, первый компаратор 18, сумматор 19, второй интегратор 20, второй ком- паратор 21, элемент ИЛИ 22, одновибра- тор 23, элемент ИЛИ 24, элемент И 25, RS-триггер 26, элемент И 27, элемент 28 ран- нозначности, элементы И 29-32, элементы ИЛИ 33 и 34, четвертый источник 35 постоянного сигнала, датчик 36 тока, нятый, нервый, второй, третий и четвертый входы 37-41 и первый и второй выходы 42 и 43 фор.мирователя 3 сигнала управ.чения, электропривод 44, первый, второй и третий входы 45-47 и первый и второй выходы 48 и 49 блока 15 выбора начала пози- ционирования.
Система может быть реализована как с использованием цифровых элементов, так и с использованием аналоговых элементов. В первом случае в качестве задатчика может быть использована ЭВА1 с линиями связи, в качестве блока 2 сравнения - цифровой блок сравнения, в качестве датчика 12 положения - цифровой датчик положения, а в качестве согласующего нреоб- разователя 14 - цифро-аналоговый нреоб- разовате;1Ь. В втором случае все неречис- ленные блоки выполняются аналоговыми. Кроме указанных возможны различные промежуточные модификации выполнения системы с нрименением с.мешанного цифро-ана- логового конструктивного вынолнения указанных блоков.
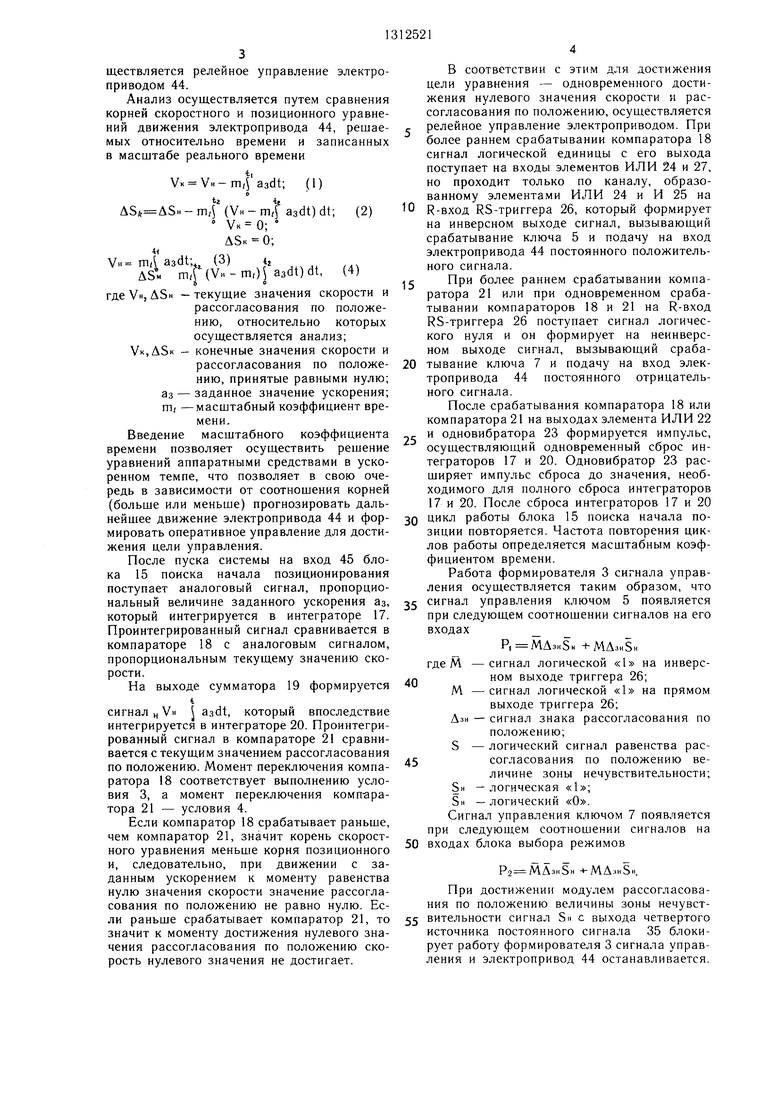
Блок 15 выбора начала позиционирования содержит интегратор 17, компаратор 18, сумматор 19, интегратор 20, комнаратор 21, элемент ИЛИ 22, одновибратор 23, элемент ИЛИ 24, элемент И 25, RS-триггер 26 и элемент И 27.
о 5
0
5 0
Формирователь 3 сигнала управления содержит элемент 28 равнозначности, элементы И 29-32, элементы ИЛИ 33 и 34.
Электропривод 44 содержит регулятор 8 тока, усилитель 9 мощности, электродвигатель 10, рабочий механизм 11, датчик 36 тока.
В качестве электродвиг ателя 10 может быть применен электродвигатель постоянного тока.
В качестве датчика скорости может быть применен тахогенератор.
Третий источник 16 постоянного сигнала формирует на своем выходе сигнал, пропорциональный величине заданного ускорения электропривода 44, а четвертый источник 35 постоянного сигнала предназначен для формирования зоны нечувствительности при формировании релейного закона управления по положению в формирователе 3 сигнала управле}1ия.
Для определенности работу системы рассмотрим при цифровом выполнении задатчика 1, блока 2 сравнения, датчика 12 положения и согласуюпцего преобразователя 14.
Система работает следующим образом.
С выхода задатчика 1 величина заданного перемещения в параллельном коде поступает па первый вход блока 2 сравнения, на второй вход которого поступает параллельный код с выхода датчика 12 по- . южения, соответствующий величине отрабо- таьщого перемещения. Выходными сигналами блока 2 сравнения являются код модуля рассогласования и сигнал знака рассогласования (логическая единица при положительном рассогласовании и логический ноль при отрицательном рассогласовании .
Аналоговые сигналы, соответствующие коду рассогласования по положению, коду заданного ускорения и коду скорости, поступают на входы 45-47 соответственно блока 15 поиска начала позиционирования. В соответствии с полученной информацией блок 15 поиска начала позиционирования формирует сигналы, корректирующиеся логическим фор.мирователе.м 3 сигнала управления, обеспечивающие формирование позиционных диаграмм электропривода 44 в соответствии с заданной величиной ускорения аз.
В основу работы блока 15 поиска на- 4a;ia нозиционирования положен принцип прогиозирующей модели. В блоке 15 поиска начала позиционирования в масщтабе реального времени многократно анализи- зуется возможность одновременного достижения нулевых значений скорости и рассогласования по положению от текущих значений с замедлением, равным заданному значению ускорения а. В зависимости от результатов анализа вырабатывается сигнал уп-равлении, вызывающий замыкание ключа 5 (либо 7) и нодачу на вход электропривода 44 положительного (либо отрицательного) постоянного сигнала, т. е. осуществляется релейное управление электроприводом 44.
Анализ осуществляется путем сравнения корней скоростного и позиционного уравнений движения электропривода 44, решаемых относительно времени и записанных в масштабе реального времени
V« V..-m,5 a3dt; (1)
о
- m/f (Ун - тД aadt) dt; (2) ° ° А5к 0;
.
VH шД asdt; (3) tj
Asl m (,)5 a3dt)dt, (4)
гдеУн, А5н -текущие значения скорости и рассогласования по положению, относительно которых осуществляется анализ;
Ук,Д5к - конечные значения скорости и рассогласования по положению, принятые равными нулю; аз - заданное значение ускорения; т/ -масштабный коэффициент времени.
Введение масштабного коэффициента времени позволяет осуществить решение уравнений аппаратными средствами в ускоренном темпе, что позволяет в свою очередь в зависимости от соотношения корней (больше или меньше) прогнозировать дальнейшее движение электропривода 44 и формировать оперативное управление для достижения цели управления.
После пуска системы на вход 45 блока 15 поиска начала позиционирования поступает аналоговый сигнал, пропорциональный величине заданного ускорения аз, который интегрируется в интеграторе 17. Проинтегрированный сигнал сравнивается в компараторе 18 с аналоговым сигналом, пропорциональным текущему значению скорости.
На выходе сумматора 19 формируется
.
сигнал ц УИ asdi, который впоследствие интегрируется в интеграторе 20. Проинтегрированный сигнал в компараторе 21 сравнивается с текущим значением рассогласования по положению. Момент переключения компаратора 18 соответствует выполнению условия 3, а момент переключения комп-ара- тора 21 - условия 4.
Если компаратор 18 срабатывает раньше, чем компаратор 21, значит корень скоростного уравнения меньше корня позиционного и, следовательно, при движении с заданным ускорением к моменту равенства нулю значения скорости значение рассогласования по положению не равно нулю. Если раньше срабатывает компаратор 21, то значит к моменту достижения нулевого значения рассогласования по положению скорость нулевого значения не достигает.
В соответствии с этим для достижения цели уравнения - одновременного достижения нулевого значения скорости и рассогласования по положению, осуществляется
релейное управление электроприводом. При более раннем срабатывании компаратора 18 сигнал логической единицы с его выхода поступает на входы элементов ИЛИ 24 и 27, но проходит только по каналу, образованному элементами ИЛИ 24 и И 25 на
0 R-вход RS-триггера 26, который формирует на инверсном выходе сигнал, вызывающий срабатывание ключа 5 и подачу на вход электропривода 44 постоянного положительного сигнала.
5 При более раннем срабатывании компаратора 21 или при одновременном срабатывании компараторов 18 и 21 на R-вход RS-триггера 26 поступает сигнал логического нуля и он формирует на неинверсном выходе сигнал, вызывающий сраба0 тывание ключа 7 и подачу на вход электропривода 44 постоянного отрицательного сигнала.
После срабатывания компаратора 18 или компаратора 21 на выходах элемента ИЛИ 22
и одновибратора 23 формируется импульс, осуществляющий одновременный сброс интеграторов 17 и 20. Одновибратор 23 расширяет импульс сброса до значения, необходимого для полного сброса интеграторов 17 и 20. После сброса интеграторов 17 и 20
0 цикл работы блока 15 поиска начала позиции повторяется. Частота повторения циклов работы определяется масштабным коэффициентом времени.
Работа формирователя 3 сигнала управления осуществляется таким образом, что
5 сигнал управления ключом 5 появляется при следующем соотношении сигналов на его входах
Р, МДзн5к +МАз„5к
где М -сигнал логической «1 на инверс- Qном выходе триггера 26;
М - сигнал логической «1 на прямом
выходе триггера 26; Лзн - сигнал знака рассогласования по
положению;
S - логический сигнал равенства рас- 5согласования по положению величине зоны нечувствительности; SH -логическая SH -логический «О. Сигнал управления ключом 7 появляется при следующем соотношении сигналов на 0 входах блока выбора режимов
Р2 МЛзн5н - -МАзиЗн.
При достижении модулем рассогласования по положению величины зоны нечувст- 5 вительности сигнал SH с выхода четвертого источника постоянного сигнала 35 блокирует работу формирователя 3 сигнала управления и электропривод 44 останавливается.
Таким образом, предлагаемая система по- ЗИЦИОЕ1НОГО управления электроприводом отличается от известных систем простой перенастройкой при изменении момента инерции или статического момента, поскольку для перенастройки необходимо только изменить уставку напряжения на выходе блока уставки заданного ускорения, что позволяет получить оптимальный по быстродействию процесс.
Формула изобретения
1.Система позиционного управления электроприводом, содержащая задатчик, соединенный выходом с первым входом блока сравнения, подключенного знаковым и модульным выходами к первому и к второму входам формирователя сигнала управления, соединенного первым и вторым выходами с управляющими входами соответственно первого и второго ключей, подключенных информационными входами к выходам соответственно первого и второго источников постоянного сигнала, а выходами - к первому и к второму входам электропривода, на входах которого установлены датчик скорости и датчик положения, соединенный выходом с вторым входом блока сравнения, отличающаяся тем, что, с целью повышения точности системы, в ней дополнительно установлены блок поиска начала позиционирования, третий и четвертый источники постоянного сигнала и согласующий преобразователь, соединенный входом с модульным выходом блока сравнения, а выходом - с первым входом блока поиска начала позиционирования, подключенного вторым входом к выходу третьего источника ностоянного сигнала, третьим выходом - к выходу датчика скорости, а первым и вторым выходами - к третьему и четвертому входам формирователя сигнала управления, соединенного пятым входом с выходом четвертого источника постоянного сигнала.
2.Система по п. 1, отличающаяся тем, что блок поиска начала позиционирования содержит первый интегратор, соединенный выходом с первым входом сумматора и с информационным входом первого компаратора, подключенного выходом к прямому входу первого элемента И, к инверсному входу первого элемента ИЛИ и к первому входу второго элемента ИЛИ, соединенного выходом со входом одновибратора, подключенного к входу сброса первого интегратора и к входу сброса второго интегратора, соединенного информационным входом с выходом сумматора, а выходом - с информационным входом второго компаратора, подключенного выходом к второму входу второго элемента ИЛИ, к инверсному входу первого элемента И, к прямому входу первого ; лемента ИЛИ и к первому входу второго элемента И, соединенного вторым входом с выходом первого элемента ИЛИ, а выходом - с R-входом RS- триггера, подключенного S-входом к выходу
первого элемента И, причем первым, вторым и третьим входами блока являются соответственно опорный вход второго компаратора, информационный вход первого интегратора и соединенные между собой опорный
вход первого компаратора и второй вход сумматора, а первым и вторым выходами блока являются инверсный и прямой выходы RS-триггера.
3. Система по п. 1, отличающаяся тем, что блок формирования сигнала управления
содержит элемент равнозначности, соединенный выходом с инверсными входами первого и второго элементов И и с первыми инверсными входами третьего и четвертого элементов И, выходы первого и третьего элементов И соединены с первым
и с вторым входами первого элемента ИЛИ, а выходы четвертого и второго элементов И соединены с первым и с вторым входами второго элемента ИЛИ, причем первые прямые входы первого и второго элементов И и вторые инверсные входы
третьего и четвертого элементов И соединены между собой и образуют первый вход формирователя, первый вход элемента равнозначности является вторым входом формирователя, второй прямой вход второго элемента И и прямой вход третьего элемента И соединены между собой и образуют третий вход формирователя, второй прямой вход первого элемента И и прямой вход четвертого элемента И соединены между собой и образуют четвертый вход формирователя, второй вход элемента равнозначности является пятым входом формирователя.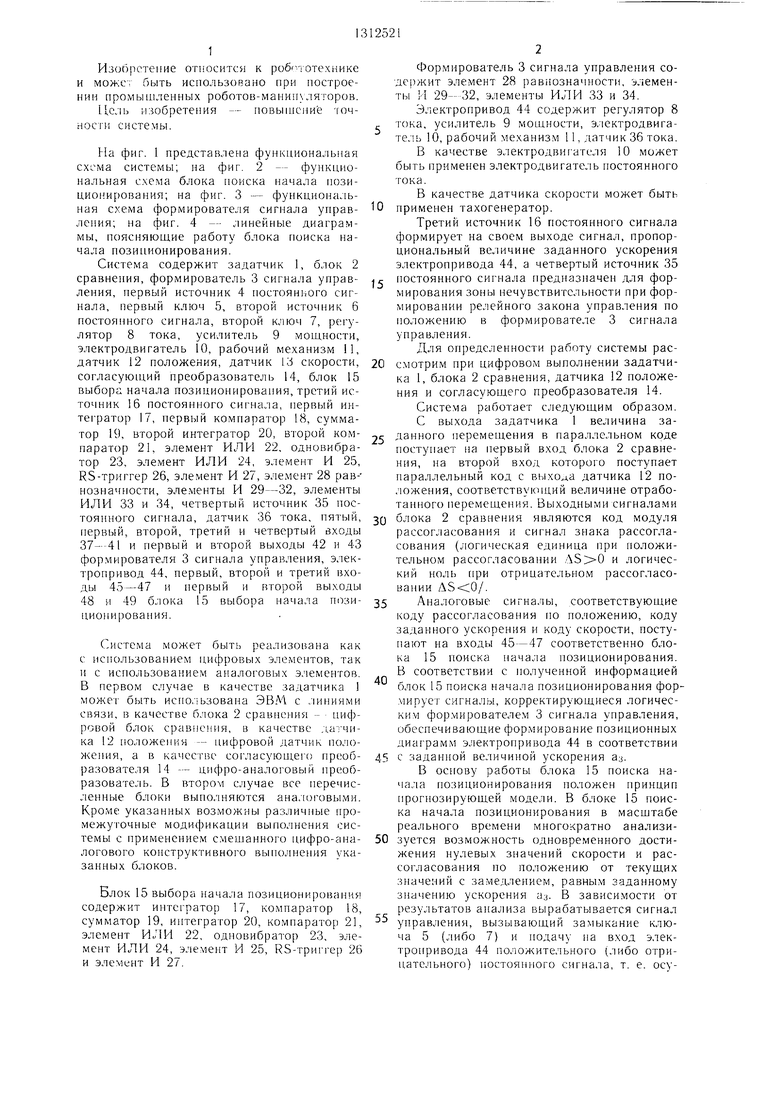
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Электропривод постоянного тока | 1985 |
|
SU1309238A1 |
| Регулятор | 1990 |
|
SU1803906A1 |
| Устройство для раздельного управления реверсивным тиристорным преобразователем | 1987 |
|
SU1503055A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Цифровая следящая система управленияпЕРЕМЕщЕНиЕМ Об'ЕКТА | 1979 |
|
SU798726A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ВРАЩАЮЩИХСЯ ДЕТАЛЕЙ НА РАЗРЫВ | 1989 |
|
RU2029276C1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
Изобретение относится к робототехнике и может найти применение при построении промышленных роботов - манипуляторов. Целью изобретения является повышение точности системы. Поставленная цель достигается за счет того, что в систему дополнительно введен блок выбора начала позиционирования, работающий в режиме прогнозирующей модели электропривода и осуществляющий сравнение корней скоростного и позиционного уравнений движения электропривода, решаемых в реальном масштабе времени, исходя из предложения равенства нулю скорости электропривода и сигнала рассогласования системы. В зависимости от результатов сравнения на вход электропривода подаются положительный либо отрицательный постоянные сигналы управления, так как реализуется релейный закон управления. При создании прогнозирующей модели используются сигнал рассогласования, скорость и заданное значение скорости электропривода. 2 з. п. ф-лы, 4 ил. S (Л с со N:) СП
6
2Ц
Ь
ад
2S
ФигЛ
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Батоврин А | |||
| А | |||
| и др | |||
| Цифровые системы управления электроприводами | |||
| Л.: Энергия, 1979, с | |||
| Одноколейная подвесная к козлам дорога | 1919 |
|
SU241A1 |
| Гарнов В | |||
| К | |||
| и др | |||
| Унифицированные системы автоуправления электроприводом в металлургии | |||
| М.: Металлургия, 1977, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
