рого элемента сравнения, а выход является первым выходом блока, первый и второй элементы 2И 2ИЛИ-НЕ, причем их первые входы подключены к выходу второго элемента НЕ, вторые, третьи.
Изобретение относится к медицинской технике, а более конкретно к устройствам дпя диагностики функдио- нального состояния человека-оператора, и может быть использовано для оперативного прогноза характеристик работы человека в системах человек машина.
Целью изобретения является обеспечение количественной оценки индивидуальной работоспособности человека- оператора, управляющего динамическим объектом, путем измерения времени реакции, количества ошибочных действий и характеристик точности управления..
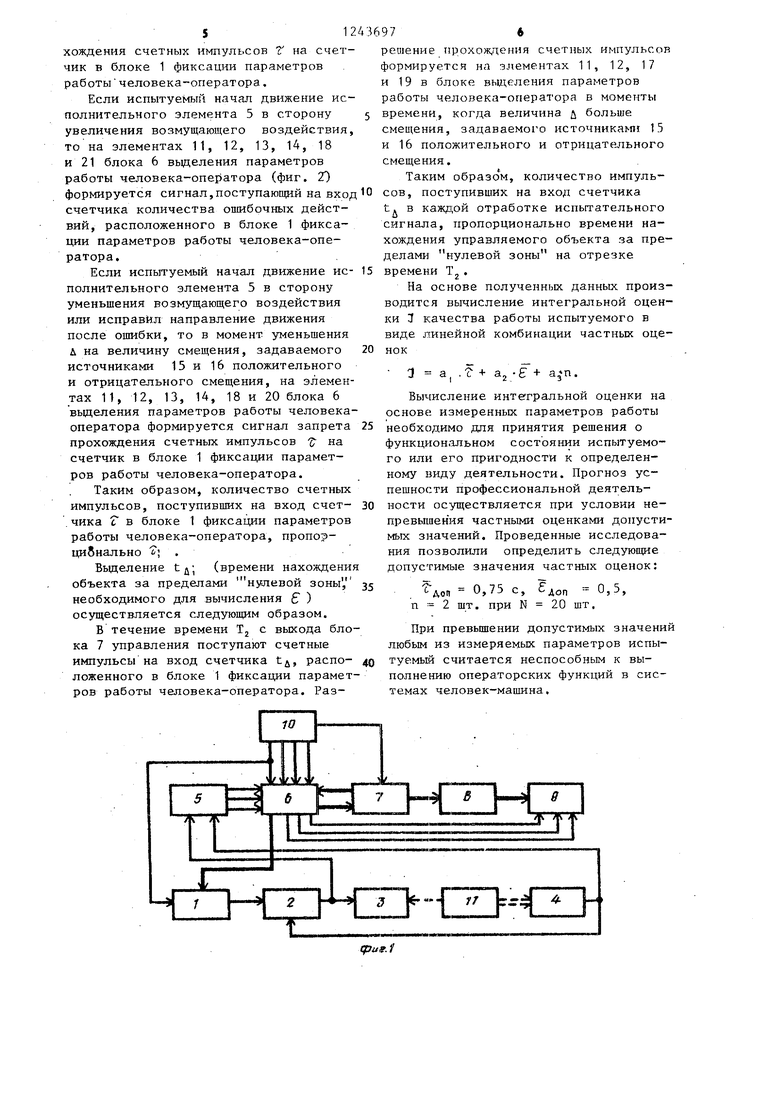
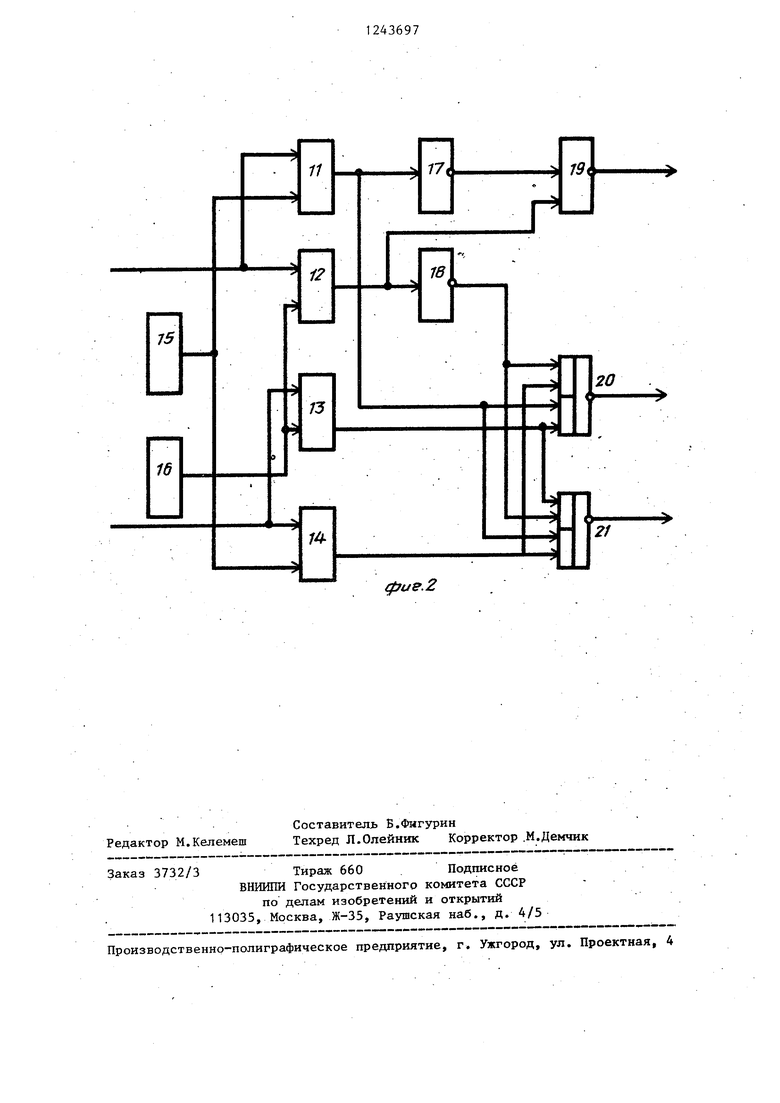
На фиг. 1 представлена функциональная схема устройства; на фиг, 2- при«ципиальная схема блока выделения параметров работы человека-оператора
Устройство дпя диагносд ики функционального состояния человека-оператора содержит соединенные последовательно блок 1 фиксации параметров . работы человека-оператора, генератор 2 возмущающих воздействий, блок 3 вычитания, блок 4 отображения заданий, а .также исполнительный элемент 5, выход которого подключен к второму входу блока 3 вычитания, выход которого соединен с первым входом 6 вьщеления параметров работы человека оператора, второй вход которого подключен к выходу исполнительного элемента 5, а первый, второй, третий выходы - к первому, второму и третье му входам блока 1 фиксации параметров человека-оператора.
В устройство введены соединенные последовательно блок 7 управления, арифметико-логический блок 8, дешифратор 9, блок 10 индикации результатов, второй, третий и четвертый входы которого соединены со вторым. третьим, четвертым выходами блока 1
четвертые входы - соответственно к выходам четвертого, первого и третьего элементов сравнения, а их выходы являются соответственно вторым и третьим выходами блока.
5
0
5
0
0
фиксац1-л параметров работы человека- оператора, четвертый, пятый, шестой и седьмой входы которого соединены с вторым., третьим, четвертым и пятым выходами блока 7 управления, восьмой злод - с вторым выходом арифметико-логического блока 8, а пятый выход - с его вторым входом, второй выход олока 7 управления соединен с вторьм входом генератора 2 возмущающих воздействий.
Блок 6 вьщеления параметров работы человека-оператора содержит первый 11,. второй 12, третий 13 и чет- вертый 14 элементы сравнения, источник 15 пололо тельного смещения, выход которого подключен к первым входам первого элемента 1 1. сравнения и четвертого элемента 14 сравнения,
вторые входы которых являются СООТ
ветственно первым и вторым входами блока 6 выделения параметров работы человека-оператора.
Блок 6 также содержит источник 16 отрицательного смещения, выход которого подключен к первым входам второго элемента 12 сравнения и третьего элемента 13 сравнения, вторые входы которьк подключены соответственно к вторым входам первого элемента 11 сравнения и четвертого элемента 14 сравнения, первьш элемент НЕ 17, второй элемент НЕ 18, входы которых подключень соответственно к выходам первого элемента 11 сравнения и второго элемента 12 сравнения, элемент. 2И-НЕ 19э первый вход которого подключен к зых.оду первого элемента НЕ 17,, второй вход - к выходу второго, элемента 12 сравнения, а выход является первым выходом блока 6 вы- параметров работы человека- оператора.
В блок 6 также входят первый элемент 2И-2ИЛИ--НЕ 20, второй элемент
3
10
15
20
25
2И-2ИЛИ-НЕ 21, причем их первые, входы подключены к выходу иторого элемента НЕ 18, вторые, третьи и четвертые входы - соответственно к выходам четвертого 14, первого 11 и третьего 13 элементов сравнения, а их выходы являются соответственно вторым и третьим выходами блока 6 выделения параметрбв работы человека-оператора.
Устройство работает следующим . образом.
Испытуемый человек-оператор наблюдает на блоке 4 отображения заданий две световые отметки. Первая отметка неподвижна и высвечивает испытуемому требуемое положение управляемого объекта. Вторая отметка подвижная и высвечивает истинное положение управляемого объекта. Расстояние между неподвижной и подвижной отметками несет информацию о величине рассогласования 4 между истиным и требуемым положениями объекта. Положение объекта может изменяться испытуемым при помощи исполнительного элемента 5. Объект по командам дт блока 7 управления подвергается периодическим (с периодом Т,), скачкообразным возмущающим воздействиям (от генератора 2 возмущающих воздействий) случайной амплитуды и знака, определяющим соответственно величину и направление ассогласования А.Значение А вычисляется в блоке 3 вычитания как разность сигналов с выходов генератора 1 и исполнительного элемента 5. Количество N возмущающих воздействий за один цикл работы устройства задается блоком 7 управления. В течение всего циклаработы испытуемомуставится задача как можно быстрее сводить U к нулю после подачи врзмущающего воздействия и поддерживать нулевое значение д при помощи исполнительного элемента 4. Работа испытуемого сое- 45 тоит из двух этапов. На первом этапе (этап грубой настройки) испытуемый стремится как можно быстрее и точнее уменьшить U до размеров нуЯевой зоны. Величина нулевой зоны опреде- 50 яется напряжениями с выходов источников 15 и 16 положительного и отрицательного . На втором этапе (этап точной настройки) испытуемый стремится непрерывно удерживать А в пределах нулевой зоны. Скорость и очность работы зависят от скорости ротекания психических процессов.
35
40
55
6974
согласованности быстрых движений глаз и рук, способности к тонким различиям в размерах, амплитуды мышечного треммора. Перечисленные психофизиологические характеристики определяют следующие характеристики работы испытуемого на устройстве для диагноза функционального состояния человека-оператора:
время реакци и Г - время от подачи возмущающего воздействия до начала движения исполнительного элемента в направлении уменьшения и (чем меньше
6, тем выше скорость протекания психических процессов).,
количество ошибочных действий tt - крличество движений исполнительного элемента в направлении, приводящем к увеличению д в первый момент после подачи возмущающего воздействия (чем меньще п, тем лучше согласованность движений),
отношение времени t нахождения управляемого объекта за пределами нулевой зоны к продолжительности T,j второго этапа работы, как характеристика точности управления
о ГТ1
(чем меньше Б, тем меньше амплитуда треммора, тем вьте способность к тонким различиям в размерах).
После прекращения каждого возмущающего воздействия испытуемый возвращает исполнительный элемент 5 в нейтральное положение, где последний удерживается при Помощи возвратных пружин.
; в блоке 6 выделения параметров работы человека-оператора происходит вьО еление перечисленных параметров работы испытуемого, а в блоке 1 фиксации параметров работы человека- оператора - регистрация, приведение к реальному масштабу и вычисление средних значений t и по формулам:
N
-L У
N Г
1
- 1
Определение времени реакции Ly и количества ошибочных действий осуществляется следующим образом.
С выхода блока 7 управления поступает сигнагЕ начала возмущающего воздействия на генератор 2 возмущающих : воздействий и сигнал разрешения прохождения счетных импульсов на счетчик в блоке 1 фиксации параметров работы человека-оператора.
Если испытуемый начал движение ис- аолнительного элемента 5 в сторону увеличения возмущающего воздействия, то на элементах 11, 12, 13, 14, 18 и 21 блока 6 выделения параметров работы человека-оператора (фиг. 20
формируется сигнал,поступающий на вход 10 сов, поступивших на вход счетчика счетчика количества ошибочных деист- t. в кажр(ой отработке испытательного ВИЙ, расположенного в блоке 1 фикса- сигнала, пропорционально времени нации параметров работы человека-опе- хождения управляемого объекта за пре- ратора, , делами нулевой зоны на отрезке
Если испытуемый начал движение ис- 15 времени Т.
полнительного элемента 5 в сторону На основе полученных данных произ- уменьшения возмущающего воздействия или исправил направление движения после ошибки, то в момент уменьшения д на величину смещения, задаваемого источниками 15 и 16 положительного и отрицательного смещения, на элементах 11, 12, 13, 14, 18 и 20 блока 6 вьщеления параметров работы человека- оператора формируется сигнал запрета 25 необходимо для принятия решения о прохождения счетных импульсов ( на функциональном состоянии испытуемо- счетчик в блоке 1 фиксации парамет- ро или его пригодности к определенному виду деятельности. Прогноз успешности профессиональной деятельводится вычисление интегральной оценки 3 качества работы испытуемого в виде линейной комбинации частных оце- 20 нок
3 а,
+ а.
+ .
Вычисление интегральной оценки на основе измеренных параметров работы
ров работы человека-оператора.
Таким образом, количество счетных
импульсов, поступивших на вход счет- ЗО ности ос:утцествляется при условии нечика Г в блоке 1 фиксации параметров работы человека-оператора, пропо - цивнально ; .
Выделение tд; (времени нахождения объекта за пределами нулевой зоны , 35 необходимого для вычисления S ) осуществляется следуюш 1м образом.
В течение времени Т; с выхода блока 7 управления поступают счетные
импульсы на вход счетчика t, распо- 40 туемьш считается неспособным к выложенного в блоке 1 фиксации парамет- полнению операторских функций в сис- ров работы человека-оператора. Разтемах человек-машина.
-,
12436976
решение прохождения счетных импульсов формируется на элементах 11, 12, 17 и 19 в блоке вьщеления параметров работы человека-оператора в моменты 5 времени, когда величина д больше смещения, задаваемо1 о источникам 15 и 16 положительного и отрицате-пьного смещения.
Таким образом, количество импульНа основе полученных данных произ- необходимо для принятия решения о функциональном состоянии испытуемо- ро или его пригодности к определенному виду деятельности. Прогноз успешности профессиональной деятельводится вычисление интегральной оценки 3 качества работы испытуемого в виде линейной комбинации частных оце- нок
На основе полученных да бходимо для принятия ре кциональном состоянии или его пригодности к о у виду деятельности. Пр ности профессиональной
3 а,
+ а.
+ .
На основе полученных данных произ- необходимо для принятия решения о функциональном состоянии испытуемо- ро или его пригодности к определенному виду деятельности. Прогноз успешности профессиональной деятельВычисление интегральной оценки на основе измеренных параметров работы
превышения частными оценками допустимых значений. Проведенные исследования позволили определить следующие допустимые значения частных оценок:
доп 0,75 с, доп 0,5, п 2 шт. при N 20 шт.
При превьш1ении допустимых значений любым из измеряемых параметров испытуемьш считается неспо полнению операторских
темах человек-машина.
. г IJlJ CZ
Т «Редактор М.Келемеш
Составитель Б.Фигурин
Техред Л.Олейник Корректор .М.Демчик
3732/3
Тираж 660 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования функционального состояния человека-оператора | 1986 |
|
SU1491451A1 |
| Устройство для оценки профессиональной пригодности операторов | 1990 |
|
SU1714652A1 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| Устройство для обучения | 1984 |
|
SU1262558A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Тренажер оператора систем управления | 1981 |
|
SU987655A1 |
| Система автоматического регулирования объектов с запаздыванием | 1976 |
|
SU682869A1 |
| Обучающее устройство | 1984 |
|
SU1234797A1 |
| Устройство для контроля работы операторов автоматизированных систем управления | 1979 |
|
SU857937A1 |
| Тренажер оператора автоматизированных систем управления | 1981 |
|
SU985817A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ РЕАКЦИИ НА ПОЛОЖЕНИЕ ДВИЖУЩЕГОСЯ СИГНАЛА | 0 |
|
SU254005A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Тренажер для обучения операторов | 1977 |
|
SU731455A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
