I
Изобретение относится к средствам защиты от вибрации и ударов и предназначено для использования в транспортных средствах и в любых других машинах и механизмах, управляемых человеком или несущих точ ные приборы и грузы, нуждающиеся в защите от вибрации. Кроме того, пре лагаемое устройство может быть использовано для снижения уровня низкочастотных колебаний постов управления самолетов на взлете и посадке или в другой самоходной технике.
Известно комбинированное виброзащитное устройство, содержащее последовательно расположенные пассивньй упруго-демпфирующий узел и активный изолятор. Активный изолятор тфедставляет собой систему автоматического регулирования, включающую сервоуправляемый исполнительный механизм, датчик абсолютного ускорения, установленный на защищаемом объекте, электронный усилитель, фазовый компенсатор и ограничивающий фильтр для пропускания частотных составляющих сигналов, лежащих в области резонанса пассивного изолтора. Параметры элементов системы автоматического регулирования настроены так, чтобы уменьшить резонансные колебания пассивного упругодемпфирующего узла 1j.
Такое виброзащитное устройство имеет ряд недостатков. Датчик ускорения (акселерометр), вырабатывающий сигнал обратной связи, установлен непосредственно на защищаемом объекте. Поэтому при функционировании виброзащитной системы амплитуда сигнала на выходе акселерометра, а следовательно, и на входе исполнительного механизма, снижается. Увеличение коэффициента усиления обратной связи с целью снижения уроня колебаний защищаемого объекта приводит к потере устойчивости замкнутого контура регулирования. Кроме того, к акселерометру, установленному на защищаемом объекте, предъявляется требование высокой чувствительности, поэтому он подчеркивает помехи и высшие гармоник
Наиболее близким к предлагаемому является устройство для виброзащиты сиденья транспортного средства, содержащее блок управления, включающий первый, второй усилители и последовательно соединенные дифферен242662
цирующий элемент, третий усилитель, вычитающий элемент, сумматор, корректирующее звено и исполнительный механизм,установленный на раме, связанной через упругие элементы с опорами, а также датчик абсолютного ускорения и датчик относительного перемещения объекта защиты, установленного на пассивном упруго-демпфирующем узле, выход которого через четвертый усилитель подключен ко второму входу сумматора.
Функцию пассивного упруго-демпфирующего узла в данном устройстве выполняет сиденье водителя-оператора самоходной мапганы.
Для получения сигнала обратной связи по относительной скорости в известном устройстве дифференцирующее звено подключено к датчику относительного перемещения, а для получения сигнала обратной связи по относительному ускорению установлено втоpoie дифференцирующее звено, подключенное к выходу первого. Датчик абсолютного ускорения, вырабатывающий сигнал по ускорению внешнего возмущающего воздействия, устанрвлен на раме 12,
Однако прототипу присуща низкая
динамическая точность устройства,
которая приводит к запаздыванию дни « жения штока исполнительного механизма относительно движения рамы и в наличии высокочастотных составляю5 щих в спектре сигнала обратной связи по относительному ускорению.
Объясняется это тем, что дифференцирующие звенья отличаются неудовлетворительной реакцией на случай 0 ные возмущения, подчеркивают высокочастотные составляющие и одновременно подавляют сигналы в диапазоне низких частот, т.е, в рабочей области активного виброзащитного уст5 ройства. Последовательная установка двух таких звеньев приводит к резкому ухудшению отношения сигнал/шум на выходе второго дифференцирующего звена. Корректирующее устройство
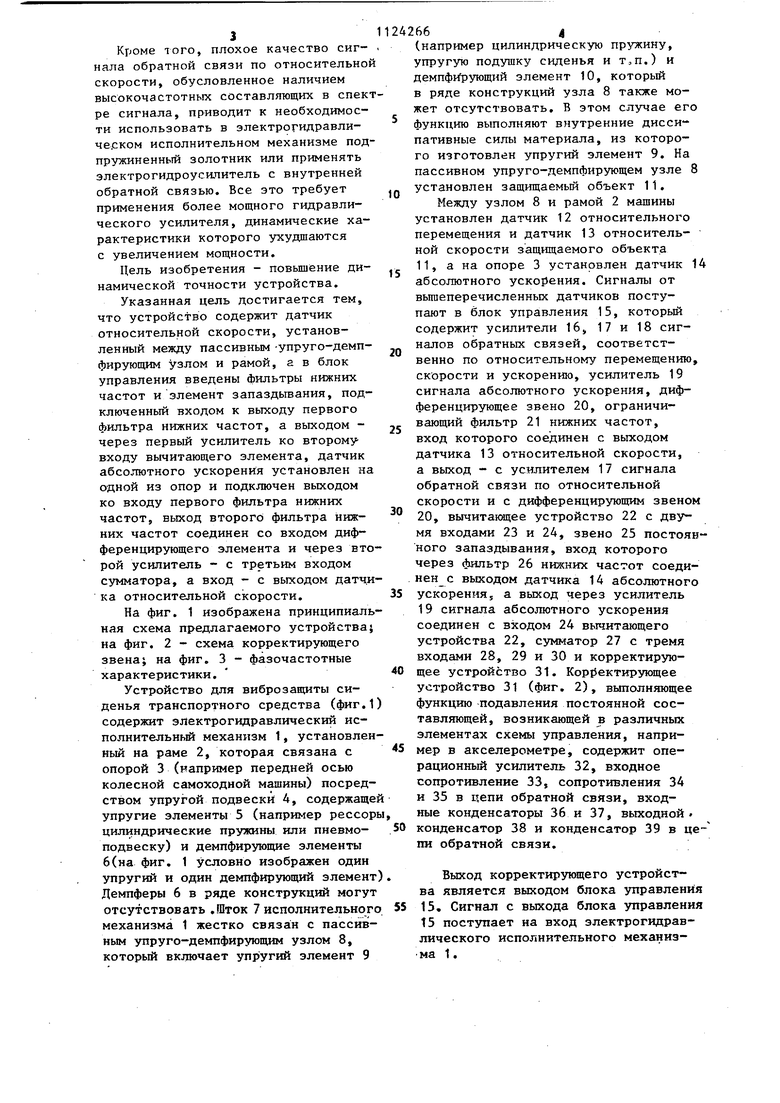
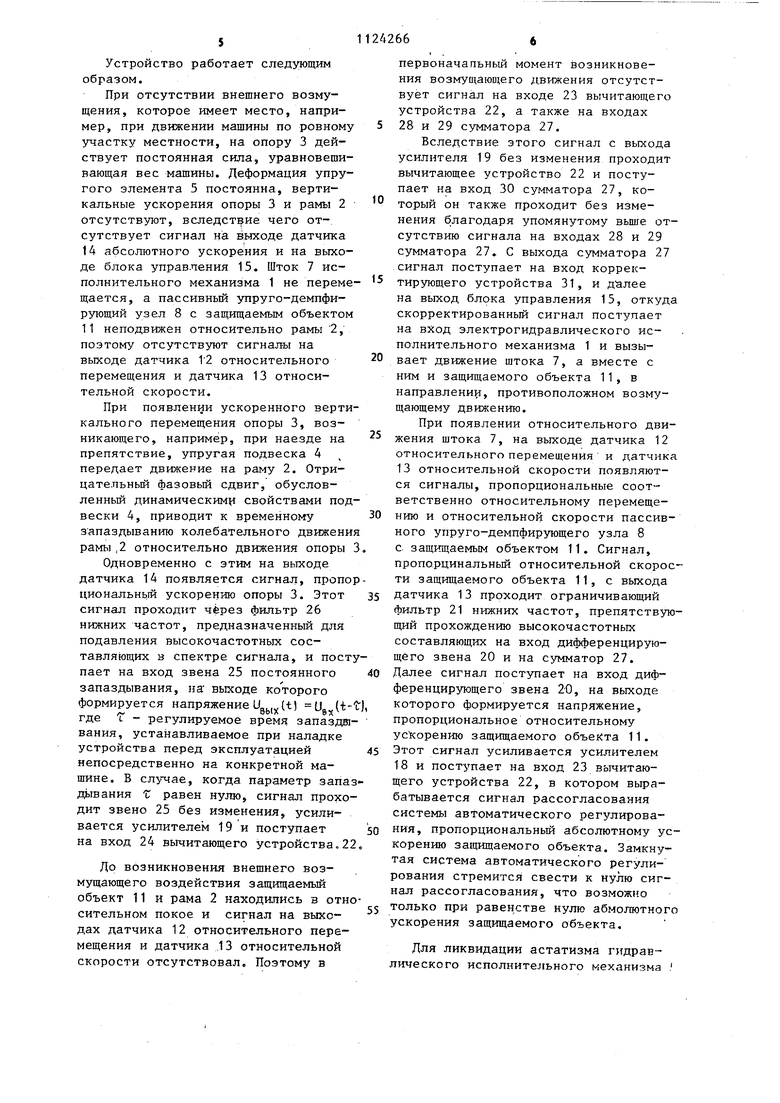
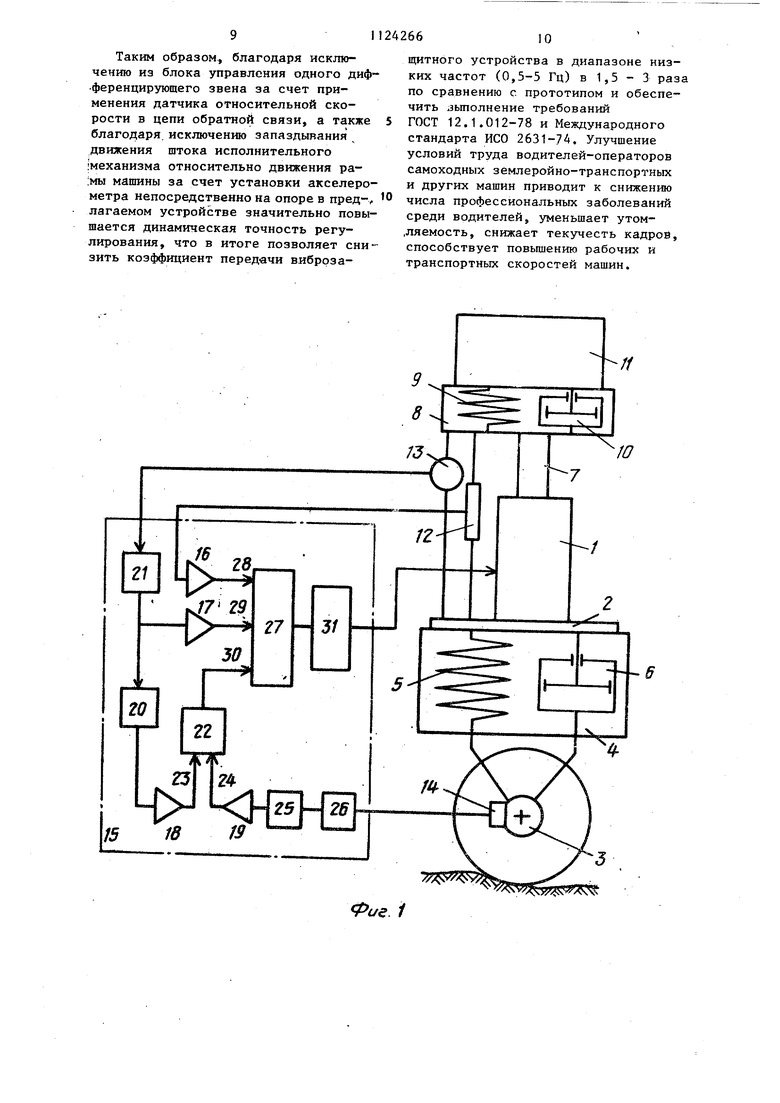
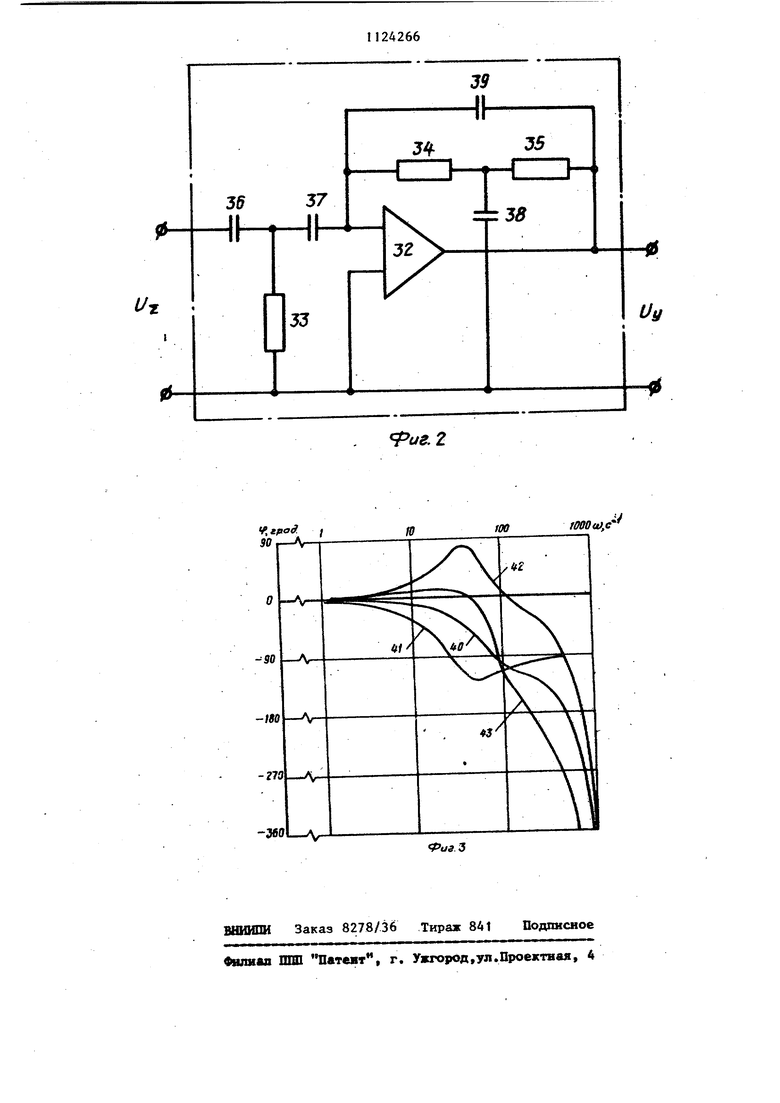
0 прототипа ч;1стично подавляет указанные высокочастотные флуктуации, однако упомякутое временное запаздывание, вносимое электрогидравлическим исполнительнь&1 механизмом и датчика5 ми обратных связей, корректирующее устройство компенсировать не может в связи со случайным характером внешнего возмущающего воздействия. кроме юго, плохое качество сигнала обратной связи по относительно скорости, обусловленное наличием высокочастотных составляющих в спек ре сигнала, приводит к необходимости использовать в электрогидравлическом исполнительном механизме под пружиненный золотник или применять электрогидроусилитель с внутренней обратной связью. Все это требует применения более мощного гидравлического усилителя, динамические характеристики которого ухудшаются с увеличением мощности. Цель изобретения - повышение динамической точности устройства. Указанная цель достигается тем, что устройство содержит датчик относительной скорости, установленный между пассивным -упруго-демпфирующим узлом и рамой, а в блок управления введены фильтры нижних частот и элемент запаздывания, подключенный входом к выходу первого фильтра нижних частот, а выходом через первый усилитель ко второму входу вычитающего элемента, датчик абсолютного ускорения установлен на одной из опор и подключен выходом ко входу первого фильтра нижних частот, выход второго фильтра нижних частот соединен со входом дифференцирующего элемента и через вто рой усилитель - с третьим входом сумматора, а вход - с выходом датчи ка относительной скорости. На фиг. 1 изображена принципиаль ная схема предлагаемого устройства на фиг. 2 - схема корректирующего звена; на фиг. 3 - фазочастотные характеристики. Устройство для виброзащиты сиденья транспортного средства (фиг. содержит электрогидравлический исполнительный механизм 1, установлен ный на раме 2, которая связана с опорой 3 (например передней осью колесной самоходной машины) посредством упругой подвески 4, содержаще упругие элементы 5 (например рессор цилиндрические пружины или пневмоподвеску) и демпфирующие элементы 6(на фиг. 1 условно изображен один упругий и один демпфирующий элемент Демпферы 6 в ряде конструкций могут отсутствовать .Шток 7 исполнительног механизма 1 жестко связан с пассивным упруго-демпфирующим узлом 8, которьА включает упругий элемент 9 (например цилиндрическую пружину, упругую подушку сиденья и т,п.) и демпфирующий элемент 10, который в ряде конструкций узла 8 также может отсутствовать. В этом случае его функцию выполняют внутренние диссипативные силы материала, из которого изготовлен упругий элемент 9. На пассивном упруго-демпфирующем узле 8 установлен защищаемый объект 11. Между узлом 8 и рамой 2 машины установлен датчик 12 относительного перемещения и датчик 13 относительной скорости защищаемого объекта 11, а на опоре 3 установлен датчик 14 абсолютного ускорения. Сигналы от выгаеперечисленных датчиков поступают в блок управления 15, который содержит усилители 16, 17 и 18 сигналов обратных связей, соответственно по относительному перемещению, скорости и ускорению, усилитель 19 сигнала абсолютного ускорения, дифференцирующее звено 20, ограничивающий фильтр 21 нижних частот, вход которого соединен с выходом датчика 13 относительной скорости, а выход - с усилителем 17 сигнала обратной связи по относительной скорости и с дифференцирующим звеном 20, вычитакщее устройство 22 с двумя входами 23 и 24, звено 25 постоянного запаздывания, вход которого через фильтр 26 нижних частот соединен с выходом датчика 14 абсолютного ускоренияS а выход через усилитель 19 сигнала абсолютного ускорения соединен с входом 24 вычитающего устройства 22, сумматор 27 с тремя входами 28, 29 и 30 и корректирующее устройство 31. Корректирующее устройство 31 (фиг. 2), выполняющее функцию подавления постоянной составляющей, возникающей в различных элементах схемы управления, например в акселерометре, содержит операционный усилитель 32, входное сопротивление 33, сопротивления 34 и 35 в цепи обратной связи, входные конденсаторы 36 и 37, выходной, конденсатор 38 и конденсатор 39 в цепи обратной связи. Выход корректирующего устройства является выходом блока управления 15, Сигнал с выхода блока управления Т5 поступает на вход электрогидравлического исполнительного механиэма 1. Устройство работает следующим образом. При отсутствии внешнего возмущения, которое имеет место, например, при движении машины по ровному участку местности, на опору 3 действует постоянная сила, уравновешивающая вес машины. Деформация упругого элемента 5 постоянна, вертикальные ускорения опоры 3 и рамы 2 отсутствуют, вследствие чего отсутствует сигнал на выходе датчика 14 абсолютного ускорения и на выходе блока управления 15. Шток 7 исполнительного механизма 1 не переме щается, а пассивный упруго-демпфирующий узел 8 с защищаемым объектом 11 неподвижен относительно рамы 2, поэтому отсутствуют сигналы на выходе датчика 12 относительного перемещения и датчика 13 относительной скорости. При появлении ускоренного верти кального перемещения опоры 3, возникающего, например, при наезде на препятствие, упругая подвеска 4 передает движение на раму 2. Отрицательный фазовый сдвиг, обусловленньш динамическими свойствами под вески 4, приводит к временному запаздыванию колебательного движени рамы ,2 относительно движения опоры Одновременно с этим на выходе датчика 14 появляется сигнал, пропо циональньм ускорению опоры 3. Этот сигнал проходит через фильтр 26 нижних частот, предназначенный для подавления высокочастотных составляющих 3 спектре сигнала, и пос пает на вход звена 25 постоянного запаздывания, на выходе которого формируется напряжение Um,(t) Ug.(t где Т - регулируемое время запаздга вания, устанавливаемое при наладке устройства перед эксплуатацией непосредственно на конкретной машине. В случае, когда параметр запа дьшания t равен нулю, сигнал прохо дит звено 25 без изменения, усиливается усилителем 19 и поступает на вход 24 вычитающего устройства,2 До возникновения внешнего возмущающего воздействия защищаемый объект 11 и рама 2 находились в отн сительном покое и сигнал на выходах датчика 12 относительного перемещения и датчика 13 относительной скорости отсутствовал. Поэтому в первоначальный момент возникновения возмущаюо5его движения отсутствует сигнал на входе 23 вычитающего устройства 22, а также на входах 28 и 29 сумматора 27. Вследствие этого сигнал с выхода усилителя 19 без изменения проходит вычитающее устройство 22 и поступает на вход 30 сумматора 27, который он также проходит без изменения благодаря упомянутому вьшге отсутствию сигнала на входах 28 и 29 сумматора 27 С выхода сумматора 27 сигнал поступает на вход корректирзтощего устройства 31, и дйлее на выход блока управления 15, откуда скорректированный сигнал поступает на вход электрогидравлического исполнительного механизма 1 и вызывает движение штока 7, а вместе с ним и защищаемого объекта 11, в направлении, противоположном возмущающему движению. При появлении относительного движения штока 7, на выходе датчика 12 относительного перемещения и датчика 13 относительной скорости появляются сигналы, пропорциональные соответственно относительному перемещению и относительной скорости пассивного упруго-демпфирующего узла 8 с защищаемым объектом 11. Сигнал, пропорцинальный относительной скорости защищаемого объекта 11, с выхода датчика 13 проходит ограничивающий фильтр 21 нижних частот, препятствующий прохождению высокочастотных составляющих на вход дифференцирующего звена 20 и на сумматор 27. Далее сигнал поступает на вход дифференцирующего звена 20, на выходе которого формируется напряжение, пропорциональное относительному уОсорению защищаемого объе1 :та 11. Этот сигнал усиливается усилителем 18 и поступает на вход 23 вычитающего устройства 22, в котором вырабатывается сигнал рассогласования системы автоматического регулирования, пропорциональный абсолютному ускорению защищаемого объекта. Замкнутая система автоматического регулирования стремится свести к нулю сигнал рассогласования, что возможно только при равен,стве нулю абмолютного ускорения защищаемого объекта. Для ликвидации астатизма гидравлического исполнительного механизма . .по отношению к нагрузке используется слабая обратная связь по относительному перемеп;ению, реализованная с помощью датчика 12, сигнал с выхо да которого усиливается усилителем 16 и поступает на вход 28 сумматора 27. Для улучшения динамики гидравлического исполнительного механизма применяется обратная связь по относительной скорости. Сигнал, пропорциональный относительной скорости защищаемого объекта, с выхода фильтра 21 поступает на усилитель и далее на вход 29 сумматора 27. Благодаря наличию фильтра 21 в лини обратной связи по относительной ско рости в гидравлическом исполнительном механизме установлен неподпружи ненный золотник, что обусловливает применение менее мощного гидроусилителя с улучшенными динамическими свойствами. Суммарный сигнал, сформированны на выходе сумматора 27 с учетом составляющих, пропорциональных абсолютному ускорению, относительной скорости и перемещению защищаемого объекта, проходит корректирующее устройство 31, которое выполняет функции высокочастотного фильтра, подавляя инфранизкочастотные и постоянные составляющие, присутствуюп1ие в структуресформированного сигнала. Скорректированный сигнал поступает на вход электрогидравлического исполнительного механизма вызывая движение щтока 7, а вместе с ним и пассивного упруго-демпфирующего узла 8 с защищаемым объектом 1 1 в направлении, противоположном внешнему возмущению, снижая тем самым уровень колебаний защища го объекта. Полное гашение колебаний будет иметь место при относительном движении защищаемого объек та строго в противофазе с движение рамы 2 мащины. Однако фазовое запа дывание, обусловленное динамическими свойствами электрогидравлического исполнительного механизма датчика 1А абсолютного ускорения и элементов блока управления 15, при водит к наличию временного запаздывания движения штока 7 исполнительного механизма 1 по сравнению движением опоры 3. В предлагаемом устройстве за сч установки датчика 14 абсолютного ускорения на опоре 3 сигнал от дат 668 чика поступает в блок управления 15 раньше, чем возмущающее воздействие достигнет рамы 2 машины. Таким образом, уста1новка датчика 14 на опоре 3 позволяет использовать инерционность упругой подвески 4 для компенсации упомянутого временного запаздьгеания относительного движения штока 7, вносимого элементами системы автоматического регулирования. Все это поясняется фазочастотными характеристиками, .полученными с помощью численного моделирования на ЦВМ и изображенными-на фмг. 3. Кривая 40, построенная с учетом параметров быстродействующего электро: гидравлического исполнительного привода, показьгеает зависимость фазового сдвига между колебаниями щтока 7 исполнительного механизма 1 и опоры 3 от частоты возмущающего воздействия. Фазочастотная характеристика подвески машины средней грузоподъемности с собственной частотой около 2 Гц представлена кривой 41. Частотная зависимость фазового сдвига между колебаниями штока 7 и рамы 2 машины, полученная как раз- .ность кривых 40 и 41, представлена кривой 42. Анализ последней показывает, tTo в области низких частот (до 15 Гц) колебательное движение штока 7 опережает движение рамы 2 машины. Величина указанного опережения обусловлена динамическими свойствами исполнительного механизма, используемого в виброзащитном устройстве и динамическими свойствами подвески машины. С целью устранения этого опережения в рабочем диапазоне частот параметр звена постоянного запаздывания устанавливается отличным от нуля при наладке устройства перед эксплуатацией непосредственно на конкретной машине. Фазочастотная характеристика, показывающая разность фаз между колебаниями штока 7 и рамы 2 машины при L О (например f 0,05 сек), представлена кривой 43 на фиг. 2. По ней видно, что в диапазоне рабочих частот от 0,5 до 5 Гц фазовый сдвиг между движением штока 7 исполни, тельного механизма 1 и рамой 2 машины близок к нулю, т.е. в этом диапазоне обеспечивается эффективная виброзащита объекта 11.
Таким образом, благодаря исключению из блока управления одного диф.ференцирующего звена за счет применения датчика относительной скорости в цепи обратной связи, а также благодаря, исключению запаздывания , движения штока исполнительного механизма относительно движения ра:мы машины за счет установки акселерометра непосредственно на опоре в пред-, лагаемом устройстве значительно повышается динамическая точность регулирования, что в итоге позволяет снизить коэффициент передачи вибррзащитного устройства в диапазоне низких частот (0,5-5 Гц) в 1,5 - 3 раза по сравнению с. прототипом и обеспечить зьшолнение требований ГОСТ 12.1.012-78 и Международного стандарта ИСО 2631-7А. Улучшение условий труда водителей-операторов самоходных землеройно-транспортных и других машин приводит к снижению числа профессиональных заболеваний среди водителей, уменьшает утом.ляемость, снижает текучесть кадров, способствует повьш1ению рабочих и транспортных скоростей машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления системой виброзащиты сиденья транспортного средства | 1982 |
|
SU1025540A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| Устройство для регулирования скорости многомассового упругого механизма | 1980 |
|
SU900265A1 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ | 1971 |
|
SU320253A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| СПОСОБ АНТИШТОПОРНОГО УПРАВЛЕНИЯ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2368541C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
J
Hh
J5
J4t
37
3ff
ф
h
Ui
53
Ь38
0
0,
0
./
fffOO i},c
/w
ФааЪ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3606233 кл | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления системой активной виброзащиты сиденья транспортного средства | 1977 |
|
SU656888A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
