действию, последовательно соединенные блок умножения, второй интегратор и седьмой сумматор. Выход датчика возмущающего воздействия соединен через второй ключ со входом второго блока сравнения. Выход датчика управляющего воздействия соединен с первым входом четвертого сумматора, выход которого соединен со вторым входом второго сумматора. Выход седьмого сумматора соединен со вторым входом регулятора. Датчнк регулируемого параметра через третий ключ соединен с первым блоком сравнения, выход которого подключен к первому входу первого сумматора, первый выход которого соединен с первым н вторым входами блока умноженпя и первым входом третьего сумматора, второй выход которого соединен с первым входом щестого сумматора. Выход третьего сумматора соединен со входом первого блока предсказания, выход второго сумматора - со вторым входом блока запаздывания, второй выход блока запаздывания- со вторым входом щестого сумматора. Выход первого интегратора подключен ко второму входу блока моделирования объекта по управляющему воздействию, выход которого соединен со вторым входом пятого сумматора, а его первый выход - с первым входом блока запаздывания, второй выход - с третьим входом второго сумматора. Первый выход блока запаздывания соединен со вторым входом третьего сумматора, выход регулятора - со вторым входом четвертого сумматора.
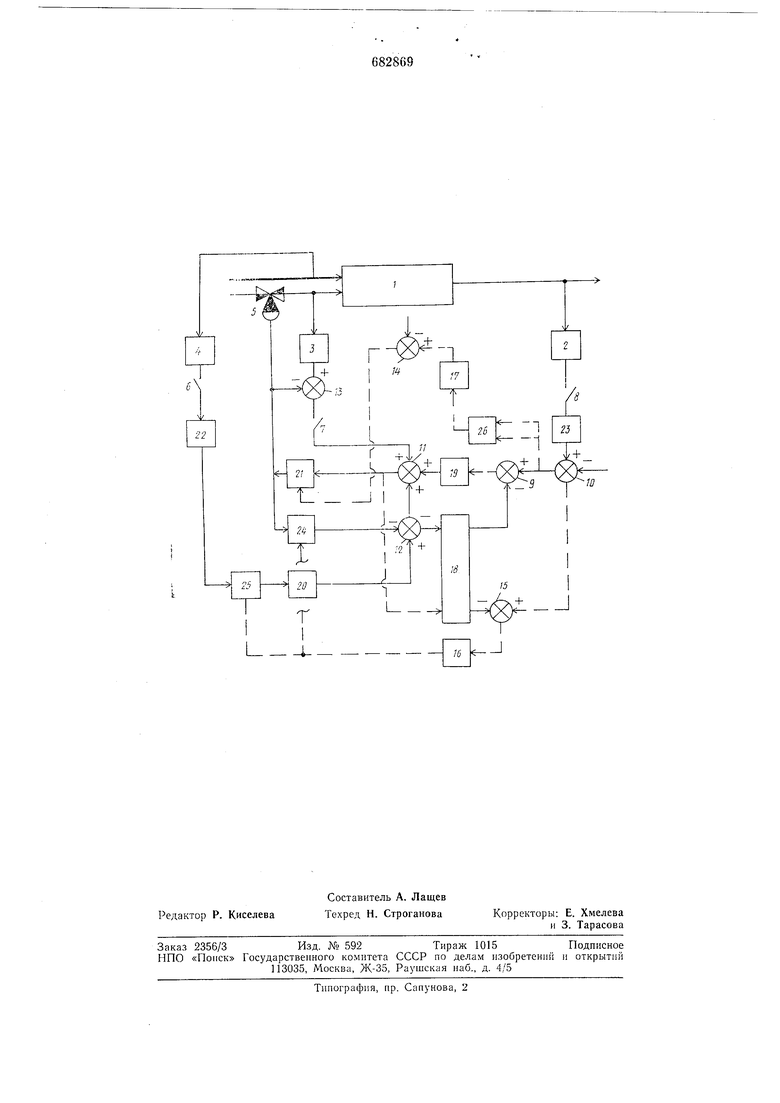
На чертеже представлена блок-схема системы автоматического рег)тировання объекта с запаздыванием.
Схема содержит объект 1 регулировапия, датчики 2, 3 и 4 регулируемого параметра, управляющего и возмущающего воздействий (соответственно), исполнительный клапан 5, соответственно второй, первый н третнй ключи 6, 7 н 8, третий, первый, второй, пятый, четвертый, седьмой и щестой сумматоры 9-15 (соответственно), первый и второй интеграторы 16 и 17, блок 18 запаздывания, первый 19 и второй 20 блоки предсказания, блоки 24 н 25 моделирования объекта соответственно по управляющему и возмущающему воздействию, блок 26 умножения.
Система работает следующим образом. В момент замыкания второго н третьего ключей 6 и 8 сигналы от датчиков 2 и 4 регулируемого параметра и возмущающего воздействия (соответственно) подаются в первый и второй блоки 23 и 22 сравнения, где они сравниваются с допустимыми диапазонами измеиения регулируемого параметра и возмущающего воздействия.
Если сигналы находятся в допустимых диапазонах, то сигнал регулируемого параметра попадает на первый сумматор 10, где из него вычитают заданное значение регулируемого параметра. Полученное отклонение от задания в дальнейщем используется в корректирующих связях, а также направляется в третий сумматор 9, где из него вычитают определенное на предыдущем цикле работы системы и сипхронизированное по времени отклонение регулируемого параметра, зависящее от управляющего и возмущающего воздействий. Получепная разность, представляющая собой фактическое отклонение регулируемого параметра, зависящее от собственных колебаний объекта, прогнозируется в первом блоке 19 предсказания па время, равное
времени запаздывания управляющего воздействия. Сигпал от датчика 4 возмущающего воздействия после второго блока 22 сравпепия попадает в блоке 25 моделирования объекта по возмущающему воздействию. Отклонение регулирз емого параметра от задания, полученное в блоке 25, прогнозируется на время, равное разности времен запаздывания по управляющему и возмущающему воздействиям во втором блоке
20 предсказания. Оба отклонения складываются во втором сумматоре И и поступают в регулятор 21. Управляющий сигнал из регулятора направляется одновременно на исполнительный клапан 5 и в
блок 24 моделирования объекта по управляющему воздействию.
Отклонение регулируемого параметра, зависящее от управляющего воздействия, складывается в пятом сумматоре 12 с отклонением, зависящим от возмущающего воздействия. Суммарное отклонение направляется вновь во второй сумматор 11, где складывается с отклонением, зависящим от собственных колебаний объекта. Полное
отклонение регулируемого параметра, прогнозированное па время запаздывания управляющего воздействия, вновь подается в регулятор 21 и так далее, пока сигнал на втором сумматоре 11 не станет равным
нулю. Этот момент будет соответствовать окончанию процесса регулирования.
Отклонение регулируемого параметра, зависящее от управляющего и возмущающего воздействий, после пятого сумматора
12 направляется в блок 18 запаздывания, где оно задерживается на время запаздывания по управляющему воздействию с целью его синхронизации с текущим сигналом регулируемого параметра. Управляющее воздействие после регулятора 21 поступает на четвертый сумматор 13, где оно вычитается из измеренного датчиком управляющего воздействия 3. Первый ключ 7 замыкается после того, как пройдет время, достаточное для установления нового значения управляющего параметра. Если выданный регулятором сигнал отличается от измеренного значения управляющего воздействия, регулятор выдает короектирующий сигнал.
Корректировка настроек регулятора осуществляется следующим образом. Сигнал после первого сумматора 10 направляется в блок умножения 26, где он умножается сам на себя. Квадрат отклонения регулируемого параметра от задания интегрируется во втором интеграторе 17, после чего из него вычитается заданное значение интеграла в седьмом сумматоре 14. Корректировку настроек регулятора 21 осуществляют так, чтобы минимизировать эту разность.
С целью корректировки коэффициентов модели сигнал после второго сумматора 11 направляют в блок 18 запаздывания, где его задерживают для синхронизации с текущим значением регулируемого параметра. В шестом сумматоре 15 из измеренного вычитают смоделированное значение отклонения регулируемого параметра, эту разность усредняют в первом интеграторе 16. Усредненный сигнал рассогласования используется для корректировки активного сопротивления и емкости в цепи линейных усилителей, из которых собраны блоки 24 и 25, моделирующие передаточные функции по управляющему и возмущающему воздействиям.
Экономическая эффективность изобретения заключается в существенно более высокой точности регулирования по сравнению с прототипом.
Проведенные исследования показали, что при внедрении данного изобретения в химическую и нефтехимическую отрасли промышленности на крупнотоннажных производствах, например производстве аммиака, экономический эффект выразится в увеличении производительности на 0,5% и уменьшении на столько же себестоимости продукции. В зависимости от мощности конкретного производства это даст дополнительную прибыль в размере от 40 до 200 тыс. рублей в год.
Формула изобретения
Система автоматического регулирования объектов с запаздыванием, содержащая первый ключ, первый сумматор, блок запаздывания, блок моделирования объекта по управляющему воздействию, последовательно соединенные датчик возмущающего воздействия и второй ключ, последовательно соединенные датчик регулируемого параметра и третий ключ, последовательно соединенные первый блок предсказания, второй сумматор, выход которого соединен
с первым входом регулятора, выход которого соединен с исполнительным клапаном и первым входом блока моделирования управляющего воздействия, последовательно
соединенные исполнительный клапан и датчик управляющего воздействия, отличающаяся тем, что, с целью повышения точности системы, она содержит первый блок сравнения, третий и четвертый сумматоры, последовательпо соединенные второй блок сравнения, блок моделирования объекта по возмущающему воздействию, второй блок предсказания, пятый сумматор, последовательно соединенные шестой
сумматор, первый интегратор, блок моделирования объекта по возмущающему воздействию, последовательно соединенные блок умножения, второй интегратор и седьмой сумматор, выход датчика возмущающего воздействия соединен через второй ключ со входом второго блока сравнения, выход датчика управляющего воздействия соединен с первым входом четвертого сумматора, выход которого соединен со вторым входом второго сумматора, выход седьмого сумматора соединен со вторым входом регулятора, датчик регулируемого параметра через третий ключ соединен с первым блоком сравнения, выход которого
соединен с первым входом первого сумматора, первый выход которого соединен с первым и вторым входами блока умножения и первым входом третьего сумматора, второй выход которого соединен с первым
входом шестого сумматора, выход третьего сумматора соединен со входом первого блока предсказания, выход второго сумматора соединен со вторым входом блока запаздывания, второй выход блока запаздывания соединен со вторым входом шестого сумматора, выход первого интегратора соединен со вторым входом блока моделирования объекта по управляющем воздействию, выход которого соединен со вторым
входом пятого сумматора, первый выход которого соединен с первым входом блока запаздывания, второй выход - с третьим входом второго сумматора, первый выход блока запаздывания соединен со вторым
входом третьего сумматора, выход регулятора соединен со вторым входом четвертого сумматора.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3644719, кл. 235- 150.1.
2. Заявка ФРГ № 2104992, кл. 42г1, 11/00, 1971 (прототип).
IU
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Система автоматического регулирования толщины полосы непрерывного стана горячей прокатки | 1977 |
|
SU733753A1 |