I
Изобретение относится к тренажерам для обучения операторов и может быть использовано для исследования психофизиологических способностей человека с целью профессионального отбора.
Известен тренажер для обучения операторов, содержащий генератор задаваемых функций, соединенный с одним из входов индикатора, другой вход которого связан с выходом даттака двигательных реакций оператора, схему вычисления ошибки, входы которой связаны с входами индикатора, измерительный блок, соединенный с регистрирующим блоком, и интеграторы 1 .
Недостатком известного устройства является невозможность оценки выполнения отдельных следящих движения оператора.
Цель изобретения - расщирение функциональных возможностей за счет получения дополнительных оценок следящих движений оператора.
Поставленная цель достигается тем, что тренажер имеет дополнительные интеграторы, коммутатор, схему управления и синхронизатор, при этом выход генератора задаваемых
функций соединен с входом синхронизатора, выход которого связан со схемой управления, причем выходы последней соед}шены с входом коммутатора, входами всех интеграторов и входами измерительного блока, а выходы коммутатора через интеграторы соед1шены с входами измерительного блока.
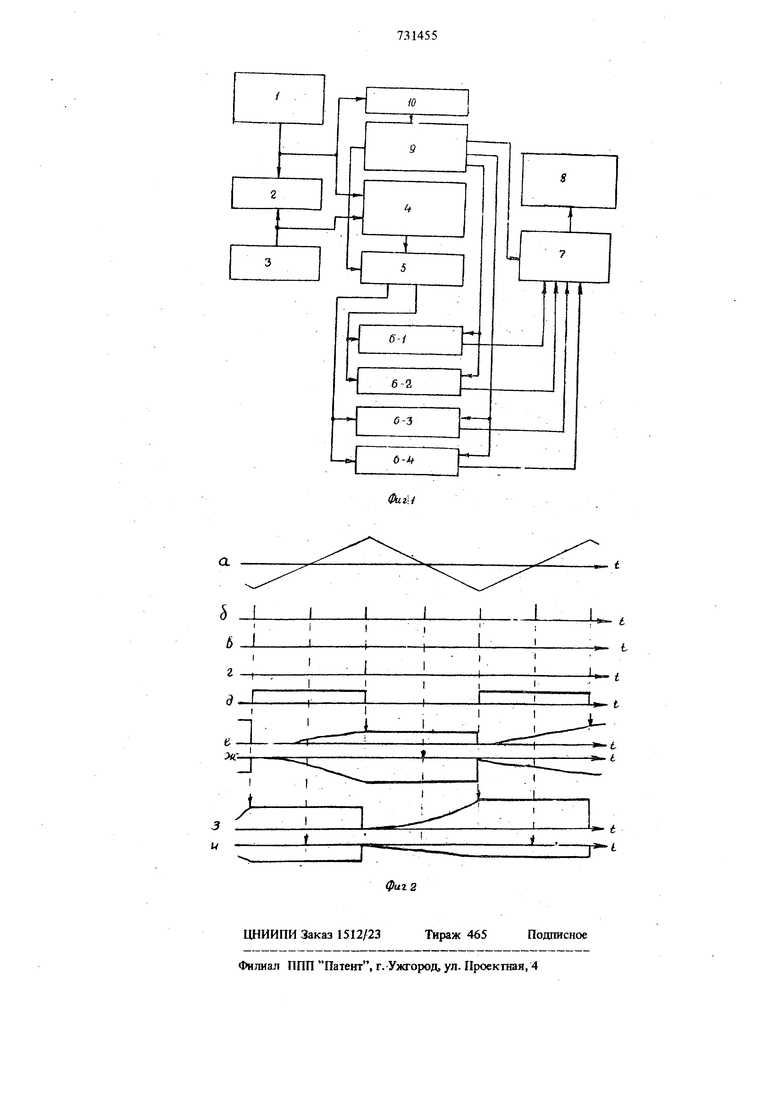
На фиг. 1 показана блок-схема устройства; на фиг. 2 - пример временной диаграммы работы устройства а - задаваемая функция;
10 б - импульсы на выходе схемы управления для запуска измерительного устройства; в, г - импульсы на выходе схемы управления для сброса показаний интеграторовб-1 и 6-2 и интеграторов 6-3 и 6-4 соответственно; д -
15 сигнал на выходе схемы управления для управления работой коммутатора; е, ж - сигналы .на выходе интеграторов 6-1 и 6-2 соответственно; 3, и - сигналы на выходе интеграторов 6-3 и 6-4 соответственно) .
20
Тренажер состоит из генератора 1 задаваемых функций, соединенного последовательно с индикатором 2 и датчиком 3 двигательных реакций оператора, схемы 4 вычисления ошиба выход :;рре1 ;0;.:.-у;;;;,р 1) :,
6, БЬ5ходи i-JOTcp: ;;..;: соедкнень: измерительиьтй 5пок 7 срегястрчрукшиы блоком 8, схемы 9 управления, соедннепьюй через синхронизйтор l(i с генератором 1 задавае ;ых функций, каждь Й из дзул аь ХсдоЕ комг гутатооа S соединен с даумя йктеграторйми б один схемы 9 управления; соединен с коммутатором 5, другой с зправляющигу нходом измерительного блока 7 и двз соединены с управляющи йи входал-,; я леграгоров 6, приче / каждый из EiHx cc;ei i-u-:5H с дпумя интегратора ми, связанными с одним из ВЫХ.ОДОЕ. коммутатора 5.
Устройство работает следующим оЦразол:, Программируемый входной ипи командный сигнал, являющийся функдней от времени, определяет двигательную ответную реакцию оператора, которуто он осуществляет путем воздействия на датчик 3, последний генерирует
ВЬХОДНОЙ CWrSSJT. Кор/ йШДЫЙ Н .гт.ы подаются на индикатор для представления оператору, Колгиественной мерой ошибки слежения является разность вдохсду входчьзм и выходньлм сигналами и оператор дсзпкен все время сводить эту разность (оишбку) к нулю.
Командный сигнал с генератора 1 задаваемых фу1-к ций поступает на вход синхронизатора Ш, индикатор 2 и схему 4 .вь числения ошибки. Ответный сигнал с датчика 3 также поступает на вторые входы индикатора 2 и. схемы 4 вычисления ошибки, где осуществляется сравнение командного и ответного сигналов; т,га, вычисляется разность глй:;кду (величи :й ошибки), которая через KcrvjrvryiaTOp 5 подается на интеграторы 6. Интеграторы 6 осуществляют операщ ю интегрнровгц-гия в течение времени, соответствующего длительности отдельного точностного движения, и величина . напряжения на их выходах соответствует интегральному показателю точности выполнения данного точностного движения. Причем коммутатор 5 подключает сразу по два интегратора 6, один из них интегрирует положительную BeflH4fffly ошибки-(в сл)гчае опережения ответного сигнала) и дает показатель опережение, другой отрицательную (в случае отставания , ответного сигнала), - показатель отставание Результаты оценок с интеграторов 6 считываются измерительным блоком 7 (цифровой вольтметр) и в цифровом вице печатаются на бумажную ленту при помощи регистрирующего блока 8 (цифропечатающей машины). Работа коммутаторов 5, интеграторов 6, измерительного блока 7 определяется схемой 9 управления, работа которой синхронизирована с фазами командного сигнала при помощи синхронизатора 10 так, что в определенные фазы кома 1Д1юго сигнала коммутатор 5 подключает к схеме 4 вычисления ошибки определенкые интеграторы 6 (налример, интеграторы 6--1 и 6-2), а с других интеграторов 6-6 и 6-4) в это время осуеществляется отсчет показаний измерительным блоком 7 и регкстрадия этих показаний. После последовательного отсчета и регистрации показаний с интеграторов 6-3 и 6-4 в момент переключения коммутатора 5 осуществляется сброс их показаний и коммутатор 5 подключает их к выходу схемь 4 вычисления ошибки и отключает интеграторы 6-1 и 6-2. Производится последовательный отсчет показаний с интеграторов 6-1 и 6-2, а интеграторы 6-3 и 6-4 осуществляют рштегрирование. Таким образом, осуществляется непрерывное измерение и регистрация в цифровом виде точности выполнения каждого TOifflocTHoro движения, связанного с фазами командного сигнала.
Показатель точности выполнения точностного следящего движения дается в относительHbix единицах, для этого перед началом работы производит тарировку, т.е. устанавливает чувствительность интеграторов 6 таким образом, что в отсутствии управляющих воздействий величина напряжения на выходе интеграторов соответствует 100%.
Формула изобретения Тренажер для обучения операторов, содержащий генератор задаваемых функций, соединенный с одним из входов индикатора, другой
вход которого связан с выходом датчика двигательных реакций оператора, схему вычисления.ошибки, входы которой связаны с входами индикатора, измерительный блок, соединенный с регистрирующим блоком, и интеграторы, отличающийся тем, что, с целью расширения: функциональных возможностей за счет получения дополнительных оценок следящих движений оператора, имеет дополнительные интеграторы, коммутатор, схему
управления и синхронизатор, при этом выход генератора задаваемых функций соединен с входом синхронизатора, выход которого связан со схемой управления, причем выходы -последней соединены с входом коммутатора,
входами всех интеграторов и входами измерительного блока, а выходы коммутатора через интеграторы соединены с входами измерительногб блока.
Источники информации,
принятые во внимание при экспертизе
I. Шапков Ю. Т. и Романов С. П., Установка для исследования следящих движений человека. Сб. Некоторые проблемы биологической кибернетики. Под ред. А. Берг. М., 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки деятельности операторов систем управления | 1978 |
|
SU752458A1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ ПО НАПРАВЛЕНИЮ | 1983 |
|
SU1840107A1 |
| Устройство для оценки профессиональ-НОй пРигОдНОСТи ОпЕРАТОРОВ ABTO-МАТизиРОВАННыХ СиСТЕМ упРАВлЕНия | 1979 |
|
SU809322A1 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| Тренажер руководителя группы операторов | 1990 |
|
SU1714653A1 |