Изобретение относится к эргономике, в частности, к устройствам обучения и тренажа операторов и может быть использовано в отраслях народного хозяйства, проектирующих и эксплуатирующих недетерминированные сис темы человек-машина, а также для проведения инженерно-психологических исследований.Цель изобретения - расширение дидактических возможностей устройства с повьппением эффективности процесса обучения и тренажа операторов путем введения объективной оценки меры трудности задачи, позволяющей дифференцированно учитывать качество усвоения дозы учебной программы у группы операторов.
На фиг.1 изображена структура устройства, на фиг.2 - схема блока моделирования изучаемого объекта на фиг.З - вычислительный .блок; на фиг.4 - имитатор сигналов воздействия .
Устройство содержит блок 1 моделирования изучаемого объекта, индикатор 2, блок 3 ручного управления,вы- чцслительный блок 4, имитатор 5 возмущающих воздействий, блок 6 ввода эталонов (эталонных импульсных переходных функций) , блок 7 сравнения, блок 8 регистрации и отображения результатов контроля, блок 9 сравнения дополнительньй вычислительный блок 10, блок 11 управления параметрами объекта тренажа, генератор 12 двоичной псевдослучайной последовательности и блок 13 памяти. Блок 11 и генератор 12 представляют собой формирователь двоичной псевдослучайной последовательности импульсов.
Электрическая схема блоков 1 и 11 приведена на фиг.З и включают узел суммирования, два интегрирующих узла, два полупроводниковых шунта (не обозначены).
Структура блоков 4 и 10 (фиг.4) содержит узел 14 памяти, узел 15 временных задержек, сдвигающий регистр 16, узел 17 сверток, распределитель 18 импульсов, узел 19 вычислений, узел 20 регистрации.
Структура имитатора 5 (фиг.З) содержит узел 21 памяти, цифро-аналоговый преобразователь 22, сумматор 23, фильтр 24 низкой частоты и генератор 25 щума.
5
0
5
0
5
Устройство после включения работает следующим образом.
Для совершенствования и оценки характеристик деятельности оператора, который выполняет свои функции в контуре управления недетерминированной системой человек-машина,узел 21 вырабатывает сигналы в виде цифровых кодов, которые задают начальные условия остояния изучаемого объекта. Кодовые сигналы через цифро-аналоговый преобразователь 22 поступают на один из входов сумматора 23, на другой вход которого через фильтр 24 подается сигнал с выхода генератора 25, имитирующий воздействующие факторы внешней средней среды. .
Результирующий сигнал с выхода сумматора 23 подводится на один из входов блока 1. Сигналы реакций последнего поступают на вход индикатора 2с Оператор в соответствии с информацией, вынесенной на индикатор 2, вьфабатывает алгоритм управляющих действий и реализует его путем воздействия на органы управления блока 3, Сигналы с выхода блока 3 подаются на одни из входов блоков 1 .и 4. .На другой вход последнего поступают сигналы с выхода имитатора 5. Блок 4 на основании зарегистрированных входных и выходных сигналов выносит количественную оценку текущего состояния управляющих действий оператора в виде текущей импульсной переходной функции h ()
.h(f) x(t- f)y(t),
где h. (Т) - импульсная переходная функция, усредненная по времени и характеризующая текущее состояние управляющих действий оператораJ xCt-t) - воздействующий сигнал, в регистрируемый на выходе имитатора 5 сигналов воздействия - сигнал реакции оператора, регистрируемый на выходе блока ,3 ручного управления;- - временные задержки. Для оценки соответствия текущего состоягния управляющих действий one- ратрра требуемому состоянию сигнал
y(t)
h(t) текущей импульсной переходной функции в блоке 7 сравнивается с эт лонньм сигналом h (1), являющимся сигналом эталонной импульсной переходной функции, который с выхода блока 6 поступает на один из входов блока 7. Результирующий сигнал с выхода блока 7 подается на вход блока 8 для документирования и представления инструктору результатов оценки в визуальном виде.
Объективная оценка меры трудност задачи, решаемой опера торами, предлагаемым обучающим устройством производится следующим образом.
Мера трудности задачи обуславли- вается степенью неопределенности во времени изменения динамических характеристик объекта тренажа. В предлагаемом обучающем устройстве изменение динамических характеристик, например, инерционности и устойчивости изучаемого объекта, осуществляется блоком 12, назначение которого - изменять 15унтирующее. действия на цепи интеграторов блока 1 под влиянием изменяющегося напряжения на выходе генератора 12.
Дпя получения объективной оценки меры трудности задачи, решаемой операторами, необходимо одновременно выходные сигналы блоков 12 и 1 подать на входы дополнительного вычислительного блока 10, который на основании входных и выходных сигналов выносит оценку мере трудности задачи
в виде импульсной переходной функции ) .,
Ьз() z(t)v(t-t) /
где hj (t) - импульсная переходная
функция, усредненная по времени и характеризующая меру трудности задачи-, z(t) - сигналы, фиксируемые на
выходе блока 12j. vCt-f) - сигналы, фиксируе ЬаГё на
выходе блока 1, - 1 - временные сдвиги. Для проведения объективной оценки меры трудности задачи необходимо сигнал Ьз Ct) , характеризующий измененное состояние изучаемого объекта подать на один из входов блока 9 и сравнить с сигналом h( D), характеризующим начальное состояние изучаемого объекта и хранящимся в блоке
А4700 .
11, который поступает на вход блока 9. Результирующий сигнал с выхода блока 9 затем поступает на один из входов блока 8 для документирования
5 и представления информации инструктору в визуальном виде.
Технико-экономический эффект предлагаемого изобретения основан на сокращении в несколько раз сроков под10 готовки специалистов, работающих в недетерминированных системах человек- машина, и повышении эффективности их управляющих действий на 30%,поскольку при помощи предлагаемого устрой15 ства можно организовать управляемый :учебный процесс,реализующий практи- чески прогрессивный метод подготовки операторов, основанный на коллек- тивных формах обучения.
20
.Формула изобретения
Обучающее устройство, содержащее
25 последовательно, включенные имитатор возмущающих воздействий, блок моделирования изучаемого объекта и индикатор, последовательно соединенные блок ручного управления, вьгаислитель3Q ный блок, первый блок сравнения и . блок регистрации и отображения ре зультатов контроля, второй вход ко- торого подключен к выходу второго блока сравнения, второй вход первого блока сравнения соединен с выходом блока ввода эталонов, второй вход блока моделирования изучаемого объекта подключен к выходу, блока руч- , ного управления, отличающееся тем, что, с целью расширения дидактических возможностей устройства, в наго введены блок памяти,выход которого соединен с первым входом второго блока сравнения, дополнительный вычислительный блок, первый вход которого подключен к выходу блока моделирования изучаемого объекта, а выход - к второму входу второ го блока сравнения, и формирователь двоичной псевдослучайной последова тельности импульсов, выход которого соединен с вторым входом дополнцтель- ного вычислительного блока и третьим входом блока моделирования изучаемого объекта, второй вход основного
55 вычислительного блока подключен к второму выходу имитатора возмущающих воздействий. .
35
45
CD ш G
йну tint
(fuel
ffr un3uMQmopaZ fjfS/fW..
h
3--4
75
(вмгол. ffJ
8yy3/fcf7 (0x6.3
сриг.З
фигЛ
Соетавитель A. Карлов Редактор И. Касарда Техред Н.Бонкало. Корректор л. Пилипенко
Заказ 3922/54 Тираж 455 Подписное
ВНИППИ Государственного комитета СССР - по делам изобретений и открытий ИЗОЗЗ, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
Sx. Б/. 4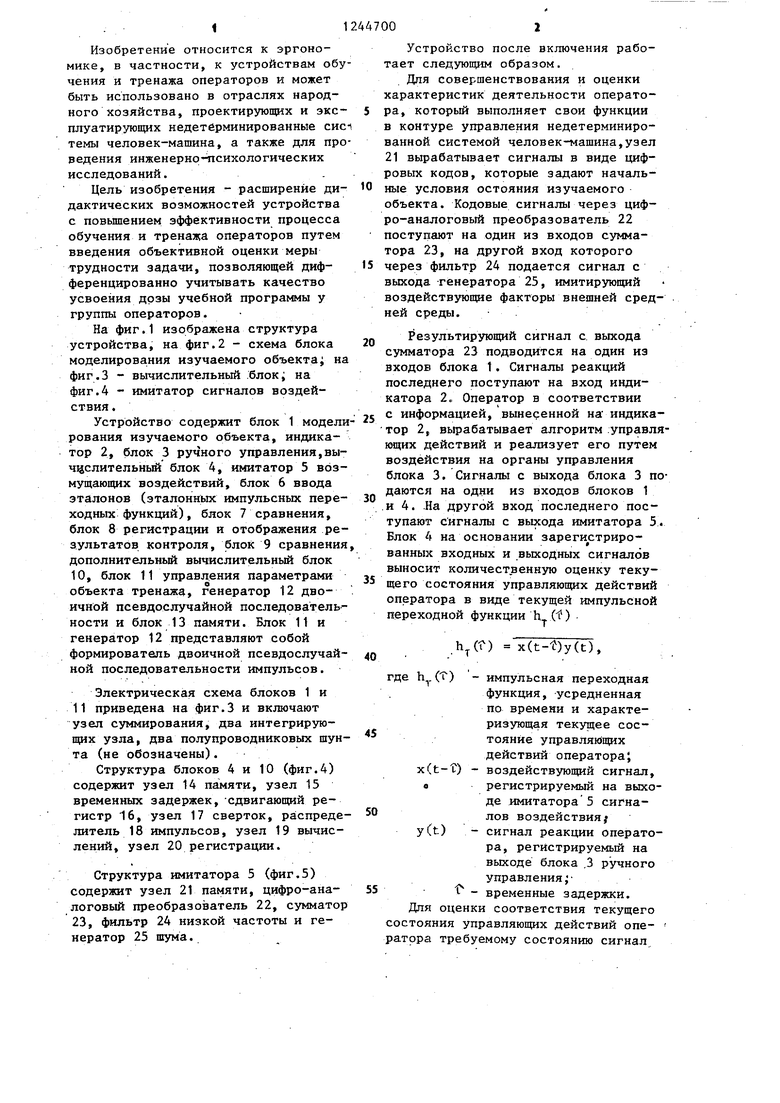
| название | год | авторы | номер документа |
|---|---|---|---|
| Обучающее устройство | 1984 |
|
SU1249567A1 |
| Обучающее устройство | 1984 |
|
SU1244699A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1121695A1 |
| Устройство для оценки эмоциональной устойчивости оператора | 1986 |
|
SU1434480A1 |
| Устройство для обучения операторов систем управления | 1986 |
|
SU1434478A1 |
| Адаптивное устройство обучения операторов | 1983 |
|
SU1138822A1 |
| Адаптивный комплекс для обучения операторов систем управления | 1982 |
|
SU1003131A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Тренажер оператора | 1983 |
|
SU1098024A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |

Изобретение относится к обучающим устройствам и может быть использовано для подготовки операторов различных систем человек-машина .Цель изобретения - расширение дидактических возможностей устройства. Сущность изобретения основана на возможности повьшения эффективности процесса обучения и тренажа, операторов в случае учета индивидуальных способностей обучаемых операторов.Для индивидуализации процесса обучения и тренажа операторов необходимо оценивать глубину усвоения каждым оператором дозы (задачи) учебной программы, для чего в данном устройстве предусмотрена оценка меры трудности задачи, решаемой операторами. Для этого в структуру известного устройства . введены блок памяти, дополнительный вычислитель и формирователь двоичной псевдослучайной последовательности импульсов. 4 ил. (Л 
| Устройство для автоматического контроля операторской деятельности | 1977 |
|
SU612278A2 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Тренажер оператора | 1981 |
|
SU959136A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
