Го
20
Изобретение относится к транспортному машиностроению, преимущественно к испытаниям транспортных средств на гусеничном ходу, и является усовершенствованием изобретения по авт. св. № 1180732.
Цель изобретения - упрощение и ускоре- ние обработки данных, а также оператив пая информация оператора о величине буксования.
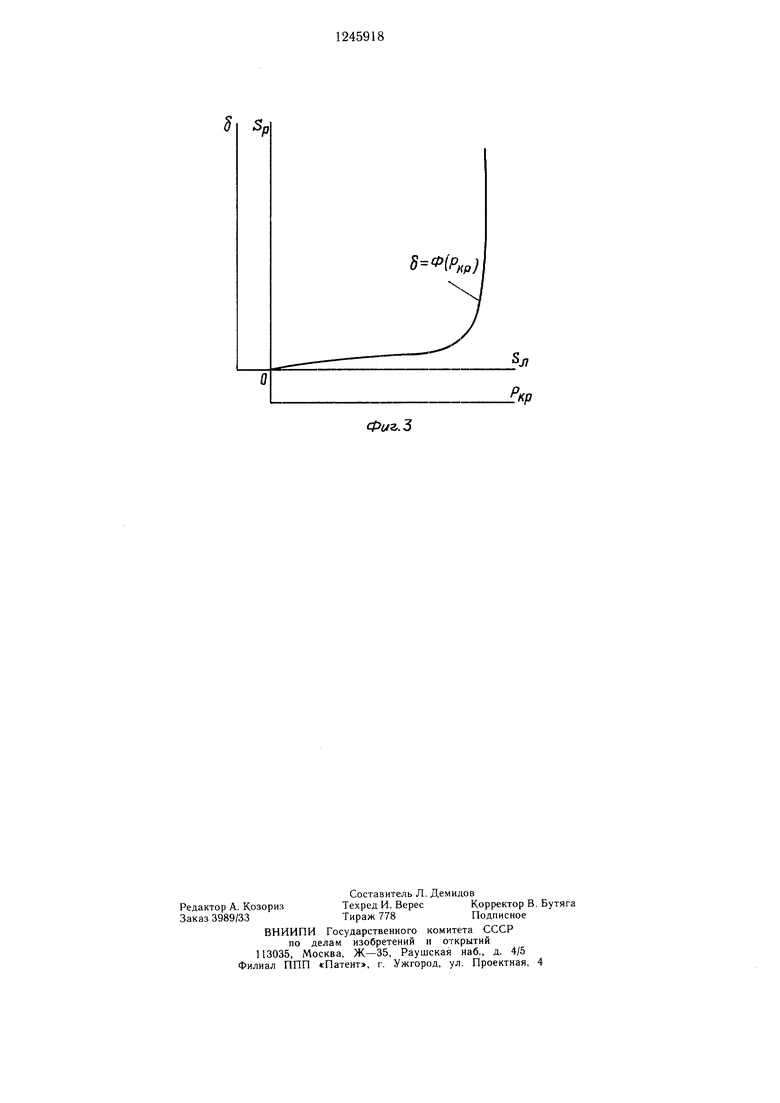
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - принципиаль- ю пая схема механизма перемещения рамки со светочувствительным слоем; на фиг. 3 - график зависимости коэффициента буксования от силы тяги на крюке.
Устройство состоит из ведомой звездочки 1, кинематически связанной с ведущей 15 звездочкой 2, установленной на ведущем колесе 3 транспортного средства. На одном валу с,ведомой звездочкой 1 закреплена шестерня 4, связанная с полуосевой щес- терней 5 через полуось и щестерню 6. Между первой полуосевой шестерней 6 и второй юлуосевой шестерней 7 установлен сателлит 8, враи1ающийся вокруг оси 9, которая соединена неподвижно с водилом 10, закрепленным на шестерне 11, находящейся в зацеплении с шестерней 12. Шестерня 12 25 закреплена на валу тахогенератора 13, который соединен проводами 14 с механизмом 15 перемещения рамки 16 со светочувствительным слоем, установленной перед осциллографом 17. С другой стороны вторая полуосевая шестерня 7 через полуось соединена 30 с шестерней 18, которая кинематически связана с шестерней 19, закрепленной на валу барабана 20 с намотанным на него тросом 21, который закреплен вне транспортного средства.
Транспортное средство оборудуется рабо- 35 чим органом 22 (отвал, рыхлитель и т. д.), который через связь 23 соединен с остовом 24 транспортного средства. В разрыве связи 23 установлено тензозвено 25, которое с помощью проводов 26 соединено с другим каналом осциллографа 17. Для информации оператора-исследователя о коэффициенте буксования тахогенератор 13 дополнительно соединен с измерительным прибором 27.
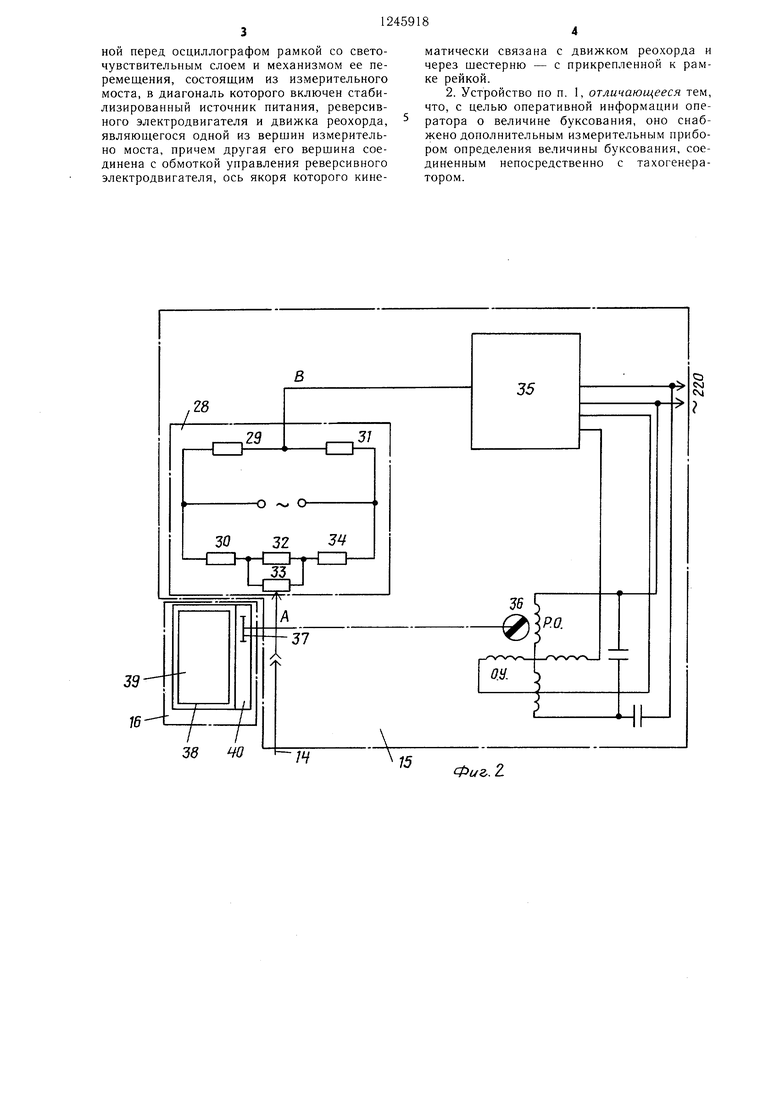
Механизм 15 перемещения состоит из измерительного моста 28, образованного резис- 45 торами 29-34, верщина А которого соединена через провода 14 с тахогенератором 13, а вершина В соединена с усилителем 35, нагрузкой которого служит реверсивный электродвигатель 36, ось якоря которого кинематически связана с движком реохорда- 50 резистора 33 и с шестерней 37 рамки 16. Рамка 16 состоит из подложки 38, на которую крепятся светочувствительный слой 39 и рейка 40, которая находится в зацеплении с шестерней 37,
через венец 2 и цепную передачу передается на ведомую звездочку 1, далее через шестерни 4 и 6 и полуось - на полуосевую шестерню 5. С другой стороны, транспортное средство, двигаясь вперед, тросом 21, укрепленным вне транспортного средства, раскручивает барабан 20. Вращение барабана 20 передается через шестерни 18 и 19 на вторую полуосевую шестерню 7, которая 1фащается в противоположную сторону от шестерни 5.
При равенстве теоретической и действительной скоростей сателлиты 8 вращаются вокруг оси 9 и шестерня 11 неподвижна.
При буксовании шестерня 7 имеет частоту вращения меньшую, чем шестерня 5, вследствие чего сателлиты 8 начинают обкатываться вокруг шестерни 7, увлекая за собой водило 10 и шестерню 11. вращение которой передается на шестерню 12, находящуюся на валу тахогенератора 13. Тахо- генератор 13 вырабатывает напряжение, которое по проводам 14 подается в механизм 15 перемещения на вер1пину А измерительного моста 28, что приводит к выводу моста из равновесного состояния, вследствие чего на вершине В возникает потенциал, который поступает на вход усилителя 35, где он преобразуется и поступает на обмотку управления реверсивного электродвигателя 36. Появление сигнала на обмотке управления приводит в движение якорь реверсивного электродвигателя, ось которого кинематически связана с движком реохорда-резистора 33 и шестерней 37. Движение происходит до тех пор, пока не наступит равновесное состояние измерительного моста усилителя 29, которое зависит от положения движка реохорда 33- Вращательное движение шестерни 37 преобразуется с помощью рейки 40 в поступательное, следовательно, подложка 38 с закрепленным на ней светочувствительным слоем 39 будет двигаться поступательно в зависимости от сигнала, подаваемого на вершину А измерительного моста 28, и, если подаваемый сигнал пропорционален коэффициенту буксования, а луч осциллографа отк/юняется в зависимости от усилия на крюке Ркр, на светочувствительном слое будет непосредственно отображаться крива5 (фиг. 3) пропорциональная коэффициенту буксования (Рк|,), где S.i - путь луча, про- порпиональный Ркр, а S,, - путь ра.мки, про- порциона.1ьный коэффициенту буксования б.
Формула изобретения
1. Устройство для исследования буксования гусеничного транспортного средства
Устройство работает следующим образом. 55 по авг. св. № 11807132, отличающееся тем,
При движении гусеничного транспортного средства враш,ение ведущего колеса 3
что, с целью упрощения и ускорения обработки данных, оно снабжено установлен0
5 5 0
5
5 0
через венец 2 и цепную передачу передается на ведомую звездочку 1, далее через шестерни 4 и 6 и полуось - на полуосевую шестерню 5. С другой стороны, транспортное средство, двигаясь вперед, тросом 21, укрепленным вне транспортного средства, раскручивает барабан 20. Вращение барабана 20 передается через шестерни 18 и 19 на вторую полуосевую шестерню 7, которая 1фащается в противоположную сторону от шестерни 5.
При равенстве теоретической и действительной скоростей сателлиты 8 вращаются вокруг оси 9 и шестерня 11 неподвижна.
При буксовании шестерня 7 имеет частоту вращения меньшую, чем шестерня 5, вследствие чего сателлиты 8 начинают обкатываться вокруг шестерни 7, увлекая за собой водило 10 и шестерню 11. вращение которой передается на шестерню 12, находящуюся на валу тахогенератора 13. Тахо- генератор 13 вырабатывает напряжение, которое по проводам 14 подается в механизм 15 перемещения на вер1пину А измерительного моста 28, что приводит к выводу моста из равновесного состояния, вследствие чего на вершине В возникает потенциал, который поступает на вход усилителя 35, где он преобразуется и поступает на обмотку управления реверсивного электродвигателя 36. Появление сигнала на обмотке управления приводит в движение якорь реверсивного электродвигателя, ось которого кинематически связана с движком реохорда-резистора 33 и шестерней 37. Движение происходит до тех пор, пока не наступит равновесное состояние измерительного моста усилителя 29, которое зависит от положения движка реохорда 33- Вращательное движение шестерни 37 преобразуется с помощью рейки 40 в поступательное, следовательно, подложка 38 с закрепленным на ней светочувствительным слоем 39 будет двигаться поступательно в зависимости от сигнала, подаваемого на вершину А измерительного моста 28, и, если подаваемый сигнал пропорционален коэффициенту буксования, а луч осциллографа отк/юняется в зависимости от усилия на крюке Ркр, на светочувствительном слое будет непосредственно отображаться крива5 (фиг. 3) пропорциональная коэффициенту буксования (Рк|,), где S.i - путь луча, про- порпиональный Ркр, а S,, - путь ра.мки, про- порциона.1ьный коэффициенту буксования б.
Формула изобретения
1. Устройство для исследования буксования гусеничного транспортного средства
по авг. св. № 11807132, отличающееся тем,
что, с целью упрощения и ускорения обработки данных, оно снабжено установленной перед осциллографом рамкой со светочувствительным слоем и механизмом ее перемещения, состоящим из измерительного моста, в диагональ которого включен стабилизированный источник питания, реверсивного электродвигателя и движка реохорда, являющегося одной из верщин измерительно моста, причем другая его верщина соединена с обмоткой управления реверсивного электродвигателя, ось якоря которого кинематически связана с движком реохорда и через щестерню - с прикрепленной к рамке рейкой.
2. Устройство по п. 1, отличающееся тем, что, с целью оперативной информации оператора о величине буксования, оно снабжено дополнительным измерительным прибором определения величины буксования, соединенным непосредственно с тахогенера- тором.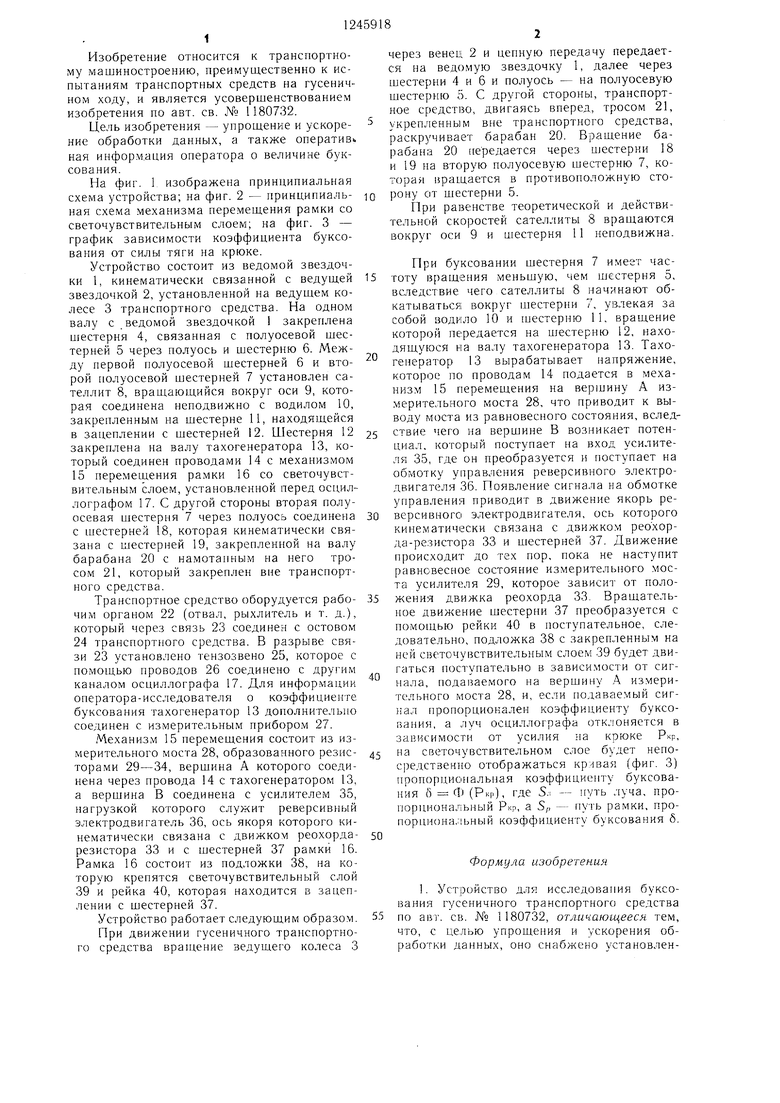
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования буксования гусеничного транспортного средства | 1984 |
|
SU1180732A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Устройство для исследования буксования гусеничного транспортного средства | 1984 |
|
SU1219947A2 |
| Устройство для тяговых испытаний гусеничных транспортных средств | 1986 |
|
SU1368692A1 |
| Ведущий мост транспортного средства | 1990 |
|
SU1701578A2 |
| Ведущий мост транспортного средства | 1989 |
|
SU1703519A2 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ С ГИДРАВЛИЧЕСКИМ СОПРОТИВЛЕНИЕМ | 2014 |
|
RU2586432C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Устройство для исследования буксования гусеничного транспортного средства | 1983 |
|
SU1158886A1 |
| КОНИЧЕСКИЙ ДИФФЕРЕНЦИАЛ С АВТОМАТИЧЕСКОЙ БЛОКИРОВКОЙ | 2017 |
|
RU2653659C1 |
Изобретение относится к устройствам для испытания транспортных средств на гусеничном ходу. Цель изобретения - упрощение и ускорение обработки данных. Ведомая звездочка 1 кинематически связана с ведущей звездочкой 2, установленной на ведущем колесе 3 транспортного средства. Между первой полуосевой щестерней 6 и второй полуосевой щестерней 7 установлен сателлит 8, вращающийся вокруг оси 9, которая соединена неподвижно с водилом 10, закрепленным на июстерне 11, находящейся в зацеплении с шестерней 12. Шестерня 12 закреплена на валу тахогенератора 13, который соединен проводами 14 с механизмом 15 перемещения рамки 16 со светочувствительным слоем, установленной перед осциллографом 17. Механизм перемещения состоит из измерительного моста, образованного резисторами, одна верщина которого соединена через провода 14 с тахоге- нератором 13. Другая верщина соединена с усилителем, нагрузкой которого служит реверсивный электродвигатель. При равенстве теоретической и действительной скоростей сателлиты 8 вращаются вокруг оси 9 и щес- терня 11 неподвижна. 1 з. п. ф-лы, 3 ил. -Z2 (Л 26 / гв ь: (27 Z5 23 .24 ND 4 СЛ СО 00
35 40 -г
Фиг. 2.
,
w/
Фг/г.З
| Устройство для исследования буксования гусеничного транспортного средства | 1984 |
|
SU1180732A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
