N
уЛУХхО(Хх
2if
г
25 25 25
мостей. Транспортное средство 1 установлено на грунтовой дорожке 2 и связано через тензометрическое звено 3 и трос 5 с прицепной тележкой 4. Барабан 6 с навитым тросом 5 связан через мультипликатор 8 с электродвигателем 10. Устройство снабжено аналоговой машиной 21, связанной с двухкоординатными самописцами 24 и 25. На аналоговую машину 21 непрерыв но подаются напряжения, снимаемые с
68692
тензометрических узлов 17 и 18, установленных на ведущих колесах 19 и 20, тензометрического звена 3, тахо- генераторов 13 и 14, установленных соответственно на валу 15 отбора мощности и электродвигателе 10, и измерительного блока 22 турборасходо- мера 23. Устройство позволяет получать зависимости тяговой характеристики и баланса мощностей транспортного средства. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования буксования гусеничного транспортного средства | 1984 |
|
SU1219947A2 |
| Устройство для исследования буксования гусеничного транспортного средства | 1983 |
|
SU1158886A1 |
| Устройство для исследования буксования гусеничного транспортного средства | 1985 |
|
SU1245918A2 |
| Устройство для автоматического управления муфтой сцепления транспортного средства при полигонных испытаниях | 1986 |
|
SU1382679A1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Стенд для испытаний секций механизированной крепи | 1986 |
|
SU1346812A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГОВО-МОЩНОСТНЫХ ПОКАЗАТЕЛЕЙ ТРАКТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2566513C1 |
| Устройство для исследования буксования гусеничного транспортного средства | 1978 |
|
SU699391A1 |
| Способ определения сопротивления качению гусениц транспортного средства | 1978 |
|
SU659927A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2267762C1 |
Изобретение относится к транспортному машиностроению, преимущест- венно к испытаниям гусеничных транспортных средств. Цель изобретения - расширение функциональных возможностей устройства, упрощение и повышение точности моделирования зависи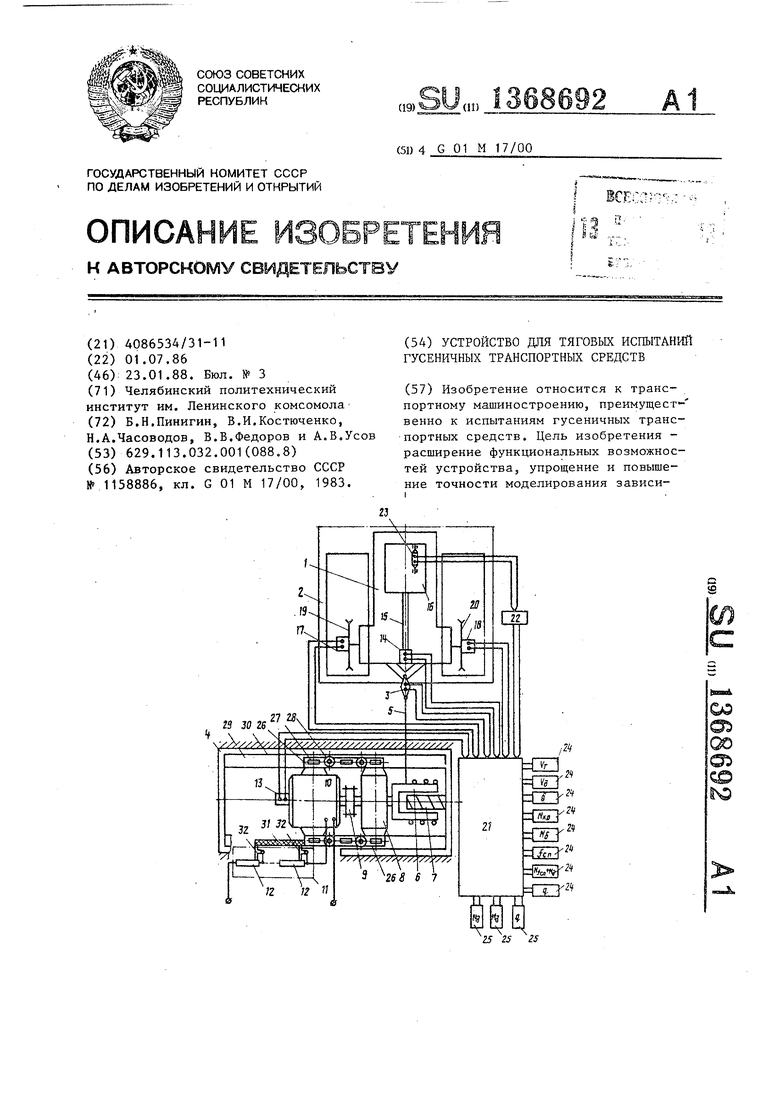
1
Изобретение относится к области транспортного машиностроения, преимущественно к испытаниям гусеничных транспортных средств.
Цель изобретения - расширение функциональных возможностей устройства, повьш1ение точности и упрощение моделирования зависимостей.
На чертеже показана электронно- кинематическая Схема устройства.
Транспортное средство 1 размещено на грунтовой -дорожке 2 и связано через тензометрическое звено 3 прицепной тележки 4 с тросом 5, нАвитым на барабан 6. Барабан 6 соединен с неподвидным валом 7 с помощью винтовой передачи, а также связан с валом соосного мультиплексора 8. С мультипликатором 8 через муфту 9 соединен тормозящий электродвигатель 10, работающий в режиме противовключения. В цепь якоря электродвигателя 10 включен блок 11, содержащий несколько добавочных переменных сопротивлений 12. Два одинаковых тахогенера тора 13 и 14, имеющих линейную зависимость выходного напряжения от частоты вращения, установлены соответственно на вал ротора электродвигателя 10 и вал 15 отбора мощности двигателя 16 (системы двигатель - гидротрансформатор) транспортного средства.
Электрические цепи тахогенерато- ров 13 и 14, тензометрического звена 3, а также ртутные секционные токосъемники тензометрических узлов 17 и 18 для замера крутящего момента
на ведущих колесах 19 и 20 транспортного средства связаны с аналоговой машиной 21 и с ней же электрически связан через измерительный блок 22
массовый однороторный турборасходомер 23.
Аналоговая машина 21 электрически связана с двухкоординатными само- писцами 24 и 25.
Барабан 6, мультипликатор 8 и электродвигатель 10 с тахогенерато- ром 13, как одно целое, подвижны в осевом направлении. Для их перемеще- ния корпусы мультипликатора 8 и
электродвигателя 10 жестко установлены на тележках 26 с вертикальными и горизонтальными роликами 27 и 28, перекатьгоающимися по поверхностям 29 и 30 тележки 4 соответственно.
С неподвижными в осевом направ-1 лении элементами, барабаном 6, мультипликатором 8 и электродвигателем 10 связана планка 31 с движками 32 регулируемых сопротивлений 12.
На аналоговой машине 21 составляется наборное поле (с использованием блоков умножения, деления, суммиро- . вания и дифференцирования); для моделирования следую1Цих величин:
V - скорость ,перематывания гусеницы, м/с; V- - скорость перемещения троса 5,
Л
м/с;
О - коэффициент буксирования, опV.-Vo. ределяемыи по формуле- -«-)
V,
Р - крюковое усилие, KPJ VHP мощность на крюке, Вт}
3 13686924
N г - мощность на буксование, Вт; суммарной величины сопротивлений 12
1
fen - коэффициент самоперекатываР -Р вания, определяемый по формуле- -
Чсц
где Р - усилие, пропорциональное величине сигналов, снимаемых с тен- зометрического звена 3, а , сцепной вес транспортного средства кг, N± + Na - суммарная мощность на
3
перекатывание и буксование, Вт
Пд - частота вращения вала тахогенератора 14, об/мин{
NA - мощность двигателя транси, следовательно, непрерывное возрастание тормозного момента электродви-1 гателя 10 до максимального значения при полной остановке барабана и транспортного средства (полное буксование, заглохание двигателя, выход на Стоп - режим для транспортного Q средства с гидромеханической трансмиссией) .
Параллельно на аналоговую машину 21 непрерьшно подаются напряжения, снимаемые с тензометрических. узлов
портного средства (выходная мощность 15 17 и 18, тензометрического звена 3, системы двигатель - гидротрансформа- тахогенераторов 13 и 14 и измерительного блока 22 расходомера 23,На аналоговой машине 21 соответтор), Вт}
Мп - крутящий момент двигателя транспортного средства (выходной моственно наборному полю моделируются
мент системы двигатель - гидротранс- 2о непрерьшные величины, пропорциональформатор), кГм}
q - удельный расход топлива двигателя транспортного средства, опре-
3600-G деляемыи по формуле :-г- ,, где
ные V, Ул, S , Р,р
ЬТ I ТЧ А Т -
N
NS + N, п
кр, NJ, f
СП
N
G J
г г с наборного поля аналоговой машины 21 непрерывные сигналы модели- 25 руемых величин подаются на двухкоор- динатные самописцы 24 и 25 следующим образом: сигнал, пропорциональный
PC
КР - на клеммы координатной оси х самописцев 24; сигналы, пропорциорасход топлива через расходомер 23, определяемый величиной тока, потребляемого обмоткой статора расходомера, и пропорциональньй выходному напряжению измерительного блока 22, зо нальные NA, Мп, q, - на клеммы координатной оси у самописцев 24; сигнал, пропорциональный Пп, - на клеммы координатной оси х самописцев 25i сигналы, пропорциональные Na, М
г/Вт-ч.
Работа устройства осуществляется следующим образом.
Транспортное средство 1 движется по грунтовой дорожке 2. При этом происходит сматывание троса 5 с барабана 6, что приводит к вращению последнего. Вращаясь, барабан 6 обеспечивает вращения якоря тормозящего электродвигателя 10. Кроме того, барабан 6 свинчивается с неподвижного вала 7 по винтовой передаче, шаг которой равен шагу навивки троса 5 на барабан 6, что обеспечивает постоянное совпадение троса 5 с продольной осью транспортного средства.
Свинчиваясь, барабан 6 осуществляет осевое перемещение мультипликатора 8 и электродвигателя 10 с тахоге- нератором 13, а также перемещение планки 31 с движками 32 регулируемых сопротивлений 12.1
Большая суммарная начальная величина регулируемых сопротивлений 12 обеспечивает минимальный тормозной момешг электродвигателя 10.
При перемещении планки 31 с движками 32 осуществляются уменьшение
35
40
3 т q -. на клеммы координатной оси у
самописцев 25.
Таким образом самописцы 24 одновременно строят зависимости тяговой характеристики и баланса мощностей транспортного средства:
45
V Ф(Ркр); N,p ФСР.р):
NS Р(Ркр);
N + Ni Ф(Р, )-,
- /Т /r
Va Р(Ркр);
(-р . о - т кр;,
fc. Р(1 кр); q ф(Ркр)я
а самописцы 25 одновременно строят характеристики двигателя (системы 50 двигатель - гидротрансформатор) транспортного средства:
N. Ф(Па)-,
Mj р(п;)-,
55 q P(nj),
на всем диапазоне тяги (на передаче I) и на диапазонах тяг каждой из передач транспортного средства.
и, следовательно, непрерывное возрастание тормозного момента электродви-1 гателя 10 до максимального значения при полной остановке барабана и транспортного средства (полное буксование, заглохание двигателя, выход на Стоп - режим для транспортного средства с гидромеханической трансмиссией) .
Параллельно на аналоговую машину 21 непрерьшно подаются напряжения, снимаемые с тензометрических. узлов
ственно наборному полю моделируются
2о непрерьшные величины, пропорциональ
ные V, Ул, S , Р,р
ЬТ I ТЧ А Т -
N
NS + N, п
кр, NJ, f
СП
г г с наборного поля аналоговой машины 21 непрерывные сигналы модели- 25 руемых величин подаются на двухкоор- динатные самописцы 24 и 25 следующим образом: сигнал, пропорциональный
PC
КР - на клеммы координатной оси х самописцев 24; сигналы, пропорциозо нальные NA, Мп, q, - на клеммы координатной оси у самописцев 24; сигнал, пропорциональный Пп, - на клеммы координатной оси х самописцев 25i сигналы, пропорциональные Na, М
нальные NA, Мп, q, - на клеммы координатной оси у самописцев 24; сигнал, пропорциональный Пп, - на клеммы координатной оси х самописцев 25i сигналы, пропорциональные Na, М
3 т q -. на клеммы координатной оси у
самописцев 25.
Таким образом самописцы 24 одновременно строят зависимости тяговой характеристики и баланса мощностей транспортного средства:
V Ф(Ркр); N,p ФСР.р):
NS Р(Ркр);
N + Ni Ф(Р, )-,
- /Т /r
Va Р(Ркр);
(-р . о - т кр;,
fc. Р(1 кр); q ф(Ркр)я
а самописцы 25 одновременно строят характеристики двигателя (системы двигатель - гидротрансформатор) транспортного средства:
N. Ф(Па)-,
Mj р(п;)-,
q P(nj),
на всем диапазоне тяги (на передаче I) и на диапазонах тяг каждой из передач транспортного средства.
В качестве регулирующих устройств вместо двухкоординатных самописцев 24 и 25 могут применяться магнитоэлектрические осциллографы.
Формула изобретения
Устройство для тяговых испытаний гусеничных тр анспортных средств, содержащее тяговый барабан, связанный с транспортным средством, винтовую передачу, связывающую барабан с неподвижным валом, тормозящий электродвигатель с блоком добавочных сопротивлений и делителем напряжения питания, аналоговую машину, соеди
ненную электрически с тахогенерато- рами,связанными с барабаном и валом двигателя, а также с двухкоординатными са- . мописцами, причем тормозящий электродвигатель соединен с барабаном через мультипликатор, отличающееся тем, что, с целью расширения его функциональных возможностей, повышения точности и упрощения моделирования зависимостей, оно снабжено электрически связанными с аналоговой машиной тензометрическими узлами, установленными на ведущих колесах гусеничного транспортного средства и между транспортным средством и тяговым барабаном.
| Устройство для исследования буксования гусеничного транспортного средства | 1983 |
|
SU1158886A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
