Изобретение относится к управлению электрическими машинами и может быть использовано при создании линейного шагового электропривода подвесных и напольных транспортных устройств.
Цель изобретения - снижение потребления энергии путем уменьшения силы трения при перемеш,ении подвижного элемента.
На фиг. 1 изображена функциональная схема устройства, реализуюн1его способ, при работе двигателя с датчиком шагов в режиме самокоммутации; на фиг. 2 - то же, при работе двигателя с датчиком положения; на фиг. 3 - подвесное транспортное устройство с линейным шаговым электродвигателем и электромагнитами, создающими вертикальное усилие, вид сбоку; на фиг. 4 - то же, вид спереди.
Устройство, реализуюш,ее способ управления линейным шаговым электродвигателем 1, содержит последовательно соединенные источник 2 задающего напряжения, усилитель 3 мощности и коммутатор 4, подключенный к обмоткам двигателя 1. Устройство содержит также датчик 5 шагов двигателя 1, подключенный к управляющему входу коммутатора 4, последовательно соединенные датчик 6 скорости, функциональный блок 7, сумматор 8, подключенный к компенсирующим электромагнитам 9. PC второму входу сумматора 8 подсоединен программный блок (ПБ) 10, функциональный блок своим другим входом подключен к дополнительному выходу коммутатора 4.
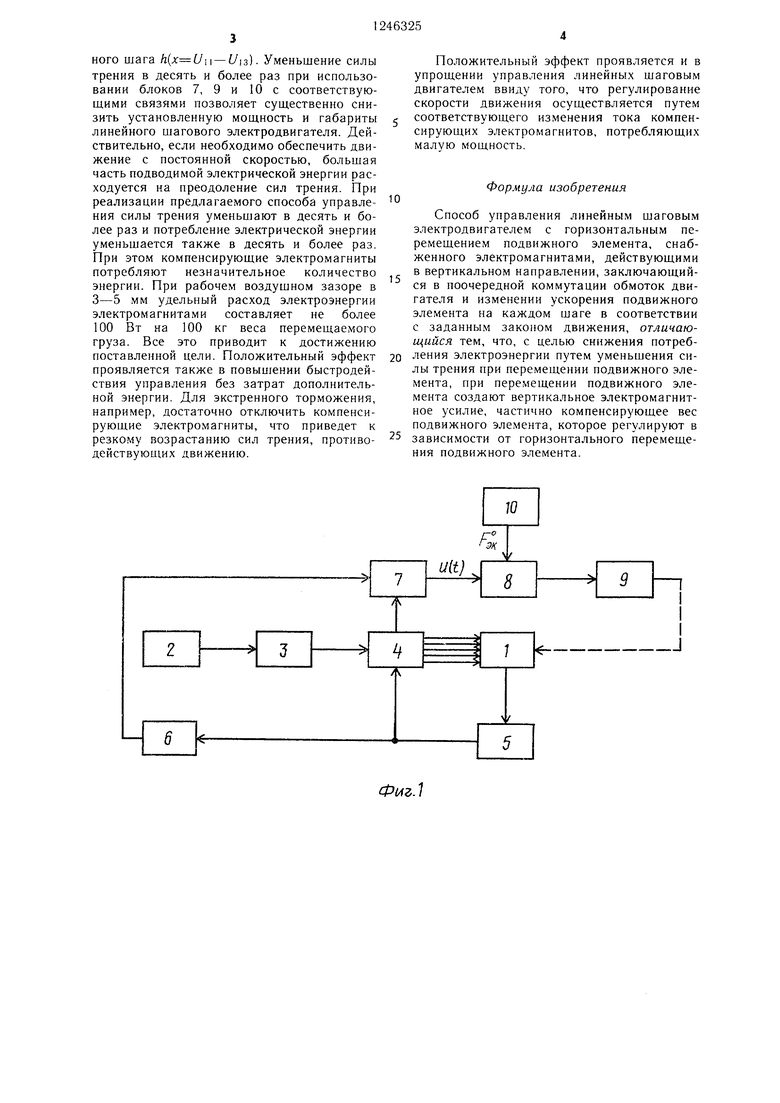
Устройство, изображенное на фиг. 2, отличается использованием не |рерывного датчика 11 положения, подвижной части двигателя 1, через аналого-цифровой преобразователь (АЦП) 12 подключенного к входам коммутатора 4, датчика 6 скорости и циф- роаналогового преобразователя 13, связанного через дифференциальный усилитель 14 с функциональным преобразователем 7. К другому входу дифференциального усилителя 14 датчик 11 положения подсоединен не- посредственно.
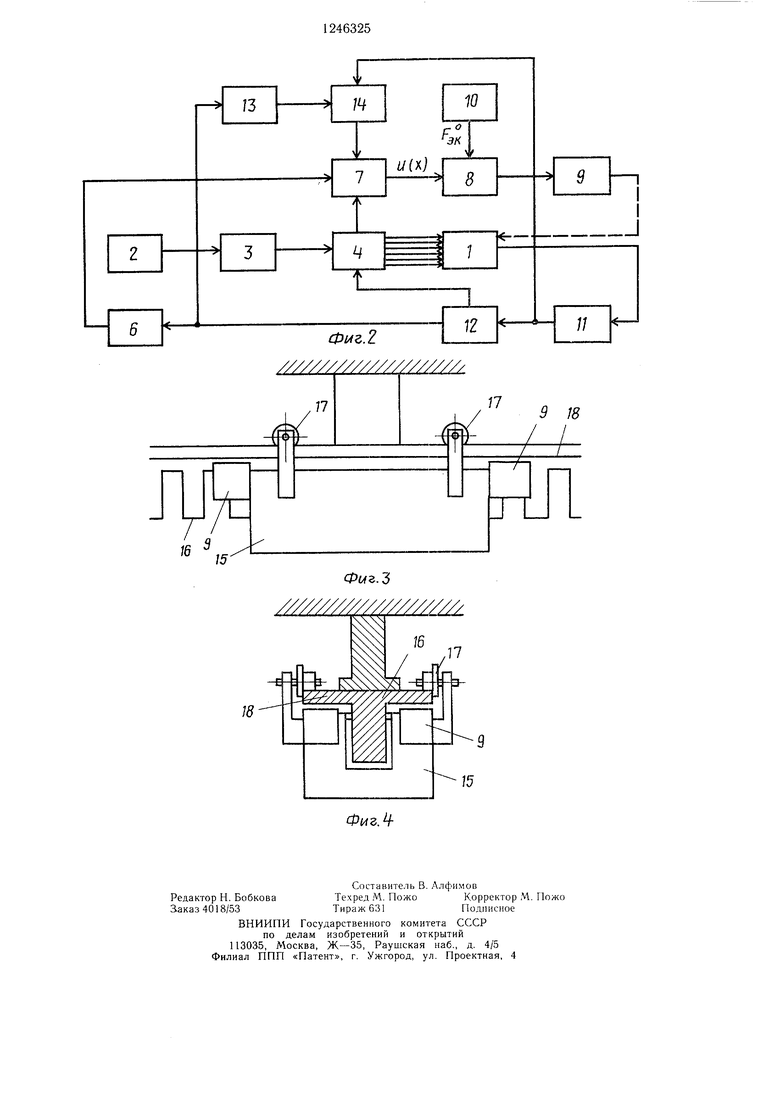
Транспортное устройство (фиг. 3 и 4) содержит линейный шаговый двигатель 1 с подвижной 15 и неподвижной 16 частями. На подвижной части 15 установлены компенсирующие электромагниты 9. Возможность продольного перемещения транспортного устройства обеспечивается использованием колес 17, контактирующих с направляющими 18. Функциональный блок 7 (фиг. ) реализует экспериментально полученную за- висимость Рэк(У,1) в пределах одного шага, где Гзк - компенсирующее усилие электромагнитов 9 (вертикально направленная составляющая тягового усилия); V-скорость перемещения подвижной части двигателя, входит как параметр в функцию Рэк(У,{}.
Зависимость Гэк(У,1} при известном весе груза определяется так, что в пределах одного шага выполняется равенство
т
А-fTp(f5K(V,/)) const.
0
5
5 0
0 5
0
5
где F. - тяговое усилие электродви1-ателя; (P-AK(V,/))/CTP - регулируемая сила
трения; Р -- вес перемещаемого груза;
/(тр - коэффициент трения.
Программный блок 10 может быть вы- полне н в Ешде источника задающего напряжения и предназначен для задания медленно меняющейся или постоянной составляющей усилии.
Устройство, реализующ.ее предлагаемый способ управления, работает следующим образом.
Пусть в начальный момент на выходе блока 2 снгна.п U-2 равен нулю, обмотки двигателя 1 обесточены, сигналы на выходах блоков 4, 6, 7 к 10 также равны нулю, обесточены н обмотки компенсирующих электромагнитов 9. При появлении сигнала б ю на выходе программног о блока 10 по обмоткам электромагнитов 9 протекает ток и возникает г.ертикальная составляющая усилия .Рэк, на 90% и более, компенсирующая вес перемещаемого тела. Статическое трение, следовательно, уменьшается. При появлении сигкала Uy. на выходе источника 2 задающего напряжения усиленный сигнал t/.i через коммутатор 4 поступает на соответ- ствуюп1ую обмотку двигате. i, по которой протекае- ток и возникает тягойое усилие. Подвижная часть 15 двигателя перемещается. При этом па каждом njare ком- у,утатор 4 подключает функциональный блок 7 через сумматор 8 к комиенсирую цим электромагнитам 9. В результате пульсации тягового усилия сглаживаются, движение становится равномерным. Квази:-1епрерывное управление шаговым электродвигателем на всем интервале движения осундествляется посредством программного блока 10. При этом, изменяя степень компенсации веса переменд,аемого груза, можно регулировать скорость н ускорение движения в силу уравнения
Гг. mV 4- f TfiFxit)).
В устройстве (. 2) аналоговый сигнал датчика 11 положения преобразуется в дискретный на выходе блока 12, причем шаг квантования соответствует шагу двигателя 1. Совокупность блоков 11 и 12, таким образом, выаол1- яет функцию датчика 5 шагов. Далее сигнал с выхода аналого-цифрового преобразователя 12 поступает на вход блока 13 н преобразуется в ступенчатый сигнал (с тем же нлагом квантования). В дифференциальном усилителе ступенчатый и., и аналоговый (Уц сигналы сравниваются н сигнал, пропорциопальный разности между ними, поступает на вход функционального блока, реа.чизующего экспериментально полученную зависимость Рз(у,х), где X (: (о, h) - координата положения подвижной части двигателя 1 в пределах одного шага h( - Ui3). Уменьшение силы трения в десять и более раз при использовании блоков 7, 9 и 10 с соответствующими связями позволяет существенно снизить установленную мощность и габариты линейного шагового электродвигателя. Действительно, если необходимо обеспечить движение с постоянной скоростью, большая часть подводимой электрической энергии расходуется на преодоление сил трения. При реализации предлагаемого способа управления силы трения уменьшают в десять и более раз и потребление электрической энергии уменьшается также в десять и более раз. При этом компенсирующие электромагниты потребляют незначительное количество энергии. При рабочем воздушном зазоре в 3-5 мм удельный расход электроэнергии электромагнитами составляет не более 100 Вт на 100 кг веса перемещаемого груза. Все это приводит к достижению поставленной цели. Положительный эффект проявляется также в повышении быстродействия управления без затрат дополнительной энергии. Для экстренного торможения, например, достаточно отключить компенсирующие электромагниты, что приведет к резкому возрастанию сил трения, противодействующих движению.
Положительный эффект проявляется и в упрощении управления линейных шаговым двигателем ввиду того, что регулирование скорости движения осуществляется путем соответствующего изменения тока компенсирующих электромагнитов, потребляющих малую мощность.
10
Формула изобретения
Способ управления линейным шаговым электродвигателем с горизонтальным перемещением подвижного элемента, снабженного электромагнитами, действующими в вертикальном направлении, заключающийся в поочередной коммутации обмоток двигателя и изменении ускорения подвижного элемента на каждом шаге в соответствии с заданным законом движения, отличающийся тем, что, с целью снижения потребления электроэнергии путем уменьшения силы трения при перемещении подвижного элемента, при перемещении подвижного элемента создают вертикальное электромагнитное усилие, частично компенсирующее вес подвижного элемента, которое регулируют в
зависимости от горизонтального перемещения подвижного элемента.
Фиг.1
/////////////////////У.
.
/
17
9 8 / I
/т
Фмг.З
///////////////////////
.ЦРедактор Н. Бобкова Заказ 4018/53
Составитель В. Алф нмов Техред .М. ПожоКорректор М. Пожо
Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4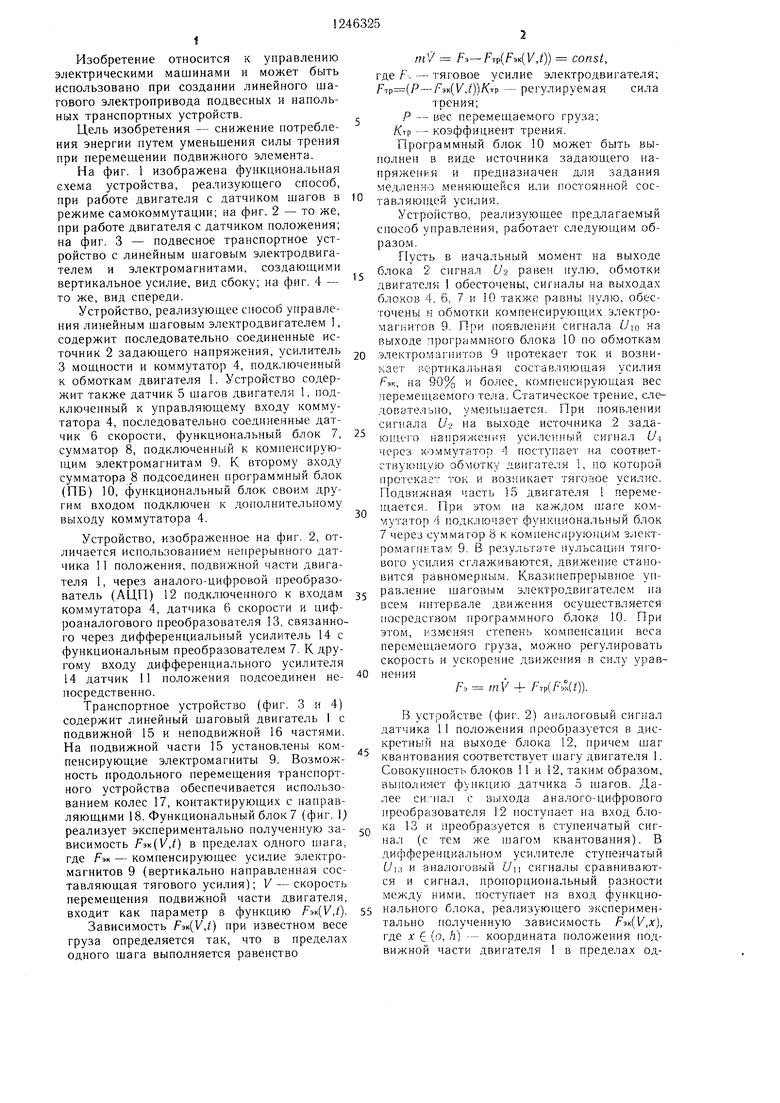
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электропривод | 1984 |
|
SU1244780A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1985 |
|
SU1274111A1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА (ЕГО ВАРИАНТЫ) И ЕГО СИСТЕМА УПРАВЛЕНИЯ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2322746C2 |
| ЭЛЕКТРОННЫЙ РЕГУЛЯТОР УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДИЗЕЛЕ | 2006 |
|
RU2299342C1 |
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227956C1 |
| ПРОПОРЦИОНАЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ ПРЯМОГО ДЕЙСТВИЯ С КООРДИНАТНЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2828817C1 |
Изобретение касается управления электрическими машинами и направлено на снижение потребления энергии линейным шаговым электродвигателем с горизонтальным перемеш,ением подвижного элемента путем уменьшения силы трения при его перемещении. При перемещении подвижного элемента создают вертикальное электромагнитное усилие, частично компенсирующее его вес. Уменьшение силы трения позволяет снизить установленную мощность и габариты двигателя. Если необходимо обеспечить движение с постоянной скоростью, большая часть подводимой энергии расходуется на преодоление сил трения. При реализации способа силы трения уменьшаются в десять и более раз и во столько же уменьшается потребление энергии. 4 ил. to 4i О СО ю СП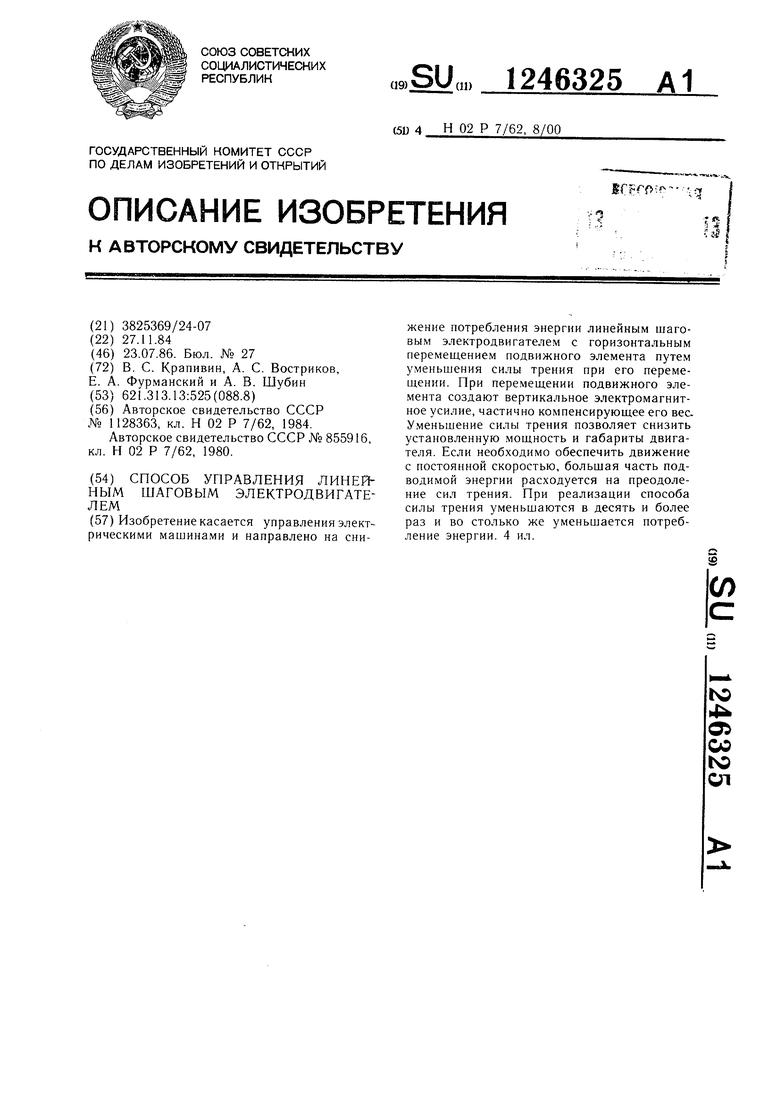
| Устройство для управления шаговым электродвигателем | 1983 |
|
SU1128363A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления линейным электродвигателем постоянного тока | 1979 |
|
SU855916A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
