Изобретение относится к управлению электрическими машинами и может быть использовано при создании проводов реле, молотков, прессов, порш невых компрессоров. Цель изобретения - увеличение ре сурса путем обеспечения безударного режима работы. При этом для одних механизмов безударный режим допусти только при обратном ходе, для других - при прямом и обратном ходе. На фиг. 1 изображена функциональ ная схема электропривода молота с электромагнитным исполнительным механизмом; на фиг. 2 - функциональная схема электропривода с электромагнитным исполнительным механизмом двустороннего действия; на фиг. 3 осциллограммы выходных величин и управляющих воздействий электропривода молота; на фиг. 4 - то же, для электропривода двустороннего действия . Электропривод содержит электромагнитньм исполнительный механизм (зим) 1 с обмотками прямого 2 н обратного 3 хода, подвижный ферромагнитньй элемент 4 и магнитопровод, включающий стальной корпус 5 с размещенными внутри него стальными фла цами 6, а также удерживающий электр магнит с обмоткой 7 и магнитопроводом 8, установленньй в торцовой неподвижной части исполнительного механизма 1. Полюс 9 удерживающего электромагнита обращен к торцовой ферромагнитной части 10 подвижного элемента электропривода, соединенно с основной ферромагнитной частью 4 посредством штока 11, который может быть выполнен из немагнитного материала. Электропривод содержит также блоки формирования управляющих импульсов прямого (БФПХ)12, обратного (БФОХ)13 хода и удержания (БФУ)14, подключенные к соответствующим обмо кам 2, 3 и 7, последовательно соеди ненные между собой датчик производной тока в обмотке (ДПТ)15, компара тор (К)16, элемент И 17, своим выходом подсоединенный к входу блока формирования 13, а входом - к выход генератора импульсов (ГИ)18, и исто ник задающего напряжения (ИЗН)19, подсоединенный к второму входу компаратора 16. Датчик производной тока в обмотке может быть выполнен в виде транс 11 , орматора тока, работающего в режиме, близком к холостому ходу, или в виде последовательно соединенных датчика тока (например, в виде шунта) и блока дифференцирования. Блоки формирования управлякжщх импульсов 12, 13 и 14 выполняются в виде соединения триггеров, ждущих мультивибраторов и полупроводниковых усилителей мощности с фазовым или широтно-импульсным управлением. Генератор импульсов 18 выполняется с использованием известных схем мультивибраторов, автогенераторов на транзисторах или микросхемах. Электропривод, показанный на1 фиг. 2, работает в безударном режиме и поэтому его функциональная схема симметричная. В данном случае обмотки прямого и обратного хода выполняют также и функции удерживающих обмоток, т.е., например, электромагнитное звено исполнительного механизма 1 с магнитопроводом 5, 6 и обмоткой 3 обратного хода вьшолняет также и функцию удерживающего электромагнита. При этом на интервале обратного-хода к.Обмотке 3 прикладывается напряжение U с выхода блока формирования 13, а далее протекание по ней тока удержания i обеспечивается воздействием напряжения и, с выхода блока формирования 14. Работа несимметричного привода заключается в следующем. Пусть ферромагнитном подвижный элемент 4 находится в нижнем (фиг.1) крайнем положении, обмотки обесточены, связь между блоками 16 и 17 отсутствует (контур ограничения скорости отключен) и отключен генератор импульсов 18. Пусть в момент времени блоки 13, 12 и 14 подключаются к соответствующим обмоткам. При этом в исходном положении при отключенном генераторе импульсов 18 под током оказывается лишь обмотка удержания 7 (см. фиг. 3), которая отключается лишь только после поступления сигнала U с выхода генератора 18 на вход блока формирования 14. В момент времени t к входам блоков 12, 14 и 17 подключается генератор 18, на выходе блока 13 формируется импульс напряжения U и по обмотке 3 протекает ток i. В результате возникает тяговое усилие F , направленное вверх. Начиная с момента 3 времени, когда тяговое усилие нарастет до величины, равной противодействующему усилию (вес подвижной части устройства плюс силы трения), осуществляется ускоренное перемещение ферромагнитного элемента 4 ввер (а также жестко связанных с ним эле ментов 10 и 11). При этом в момент времени t происходит соударение подвижного 10 и неподвижного 9 элементов электропривода и ферромагнит ная торцовая часть 10 подвижного элемента прилипает к полюсу 9 уде живающего электромагнита. Как видно из осциллограмм на фиг. 3, ускоренное перемещение подвижного элемента 4 приводит к существенному нарастанию противо-ЭДС движения в силу зависимости Е dL dx bdx т- и, начиная с момента вре, ток i начинает уменьшатьс мени t Следовательно, производная в этот момент проходит через ноль и меняет знак на противоположный. После прилипания торцовой части 10 к полюсу 9 и далее до момента отключения управляющего напряжения tj (задают блоком 13) ток i. нарастает с постоянной времени, равной L(x)/R , гдеЬдК - индуктивность и сопротивление обмотки 3; х - координата перемещения подвижного элемента. Далее в момент времени t воздействие сигнала U на блок 12 приводит к формированию на выходе последнего управляющего напряжения U,,jj и протеканию тока i в обмотке 2 В результате нарастает тяговое усилие, направленное вниз. В требуемый момент времени t j (задается блоком 14) формированно отключается об мотка удерживающего электромагнита и подвижная часть электропривода ускоренно перемещается вниз до соуд рения с основанием в момент времени tg. Затем отключается обмотка прямо го хода 2 (длительность импульса напряжения Т задается блоком 12) и вновь включается обмотка удержания 7 (спустя время задержки, задаваемое блоком 14). Далее все процес сы протекают аналогично описанным. Пусть теперь в начальный момент времени исходное состояние элек тропривода соответствует фиг. 1,3 и выход блока 16 подключен к входу 14 блока 17 (подключен контур ограничения скорости). При этом для упрощения принимают и 0 на выходе блока 19. Для повышення помехоустойчивости напряжение и отрицательно. При поступлении си1нала U с выхода генератора 18 на вход элемента И 17 переходные процессы в электроприводе протекают аналогично описанным до момента времени t . Далее dig меняет знак, компапроизводнаяратор срабатывает и напряжение с его выхода блокирует сигнал U, , что приводит к отключению управляющего напряжения и,з ток i резко спадает. В результате резко уменьшается до нуля тяговое усилие, что приводит к торможению подвижного элемента 4 и значительному уменьшению его конечной скорости в момент соударения с полюсом 9. Этим и обеспечивается безударный режим работы электропривода (несимметричного) при обратном ходе. Симметричный электропривод работает следующим образом. Пусть ферромагнитный подвижный элемент 4 находится в правом крайнем положении внутри электромагнитного звена с обмоткой 2 (фиг. 2). Обмотки 2 и 3 обесточены и контуры ограничения скорости с блоками 15, 16, 17 и 19 отключены. При поступлении с выхода генератора 18 сигнала Ц на вход элемента И 17 воздействие выходного напряжения U,-, этого усилителя на вход блока формирования 13 приводит к появлению на выходе по.следнего управляющего напряжения Ц В результате по обмотке 3 протекает ток ij и возникает электромагнитное тяговое усилие F , направленное в сторону уменьшения воздушного зазора (к полюсу 9). Ферромагнитный элемент 4 ускоренно п:еремещается, и в момент времени, равный t происходит соударение торцовой части 10 ферромагнитного элемента 4 с полюсом 9. Как видно из осциллограммы на фиг. 3, ускоренное перемещение подвижного элемента приводит к существенному нарастанию противо-ЭДС-движения в силу зависимости Е dL , dx i,j . g- и, начиная с момента времени t , ток i начинает уменьшаться. Следовательно, производная в этот S момент проходит через ноль и меняет знак на противоположный. После соударения подвижного элемента 4 с полюсом 9 ферромагнитньш элемент прилипает к последнему и далее до момента отключения управляющего напряжения и ток нарастает с постоян ной времени, равной L(x)/R5.После отключения управляющего напряжения на обмотку 3 воздействует напря женив и. с выхода блока формирования 14 и ток i спадает до значения i jj с такой же постоянной времени. В требуемый момент времени отключается напряжение U и при поступлении сигнала управления с другого выхода генератора 18 - U,g на вход другого элемента И 17 процессы в электроприводе протекают аналогично описанным и подвижный элемент 4 перемещается вправо, втягиваясь в соленоид, образованный элементами 2, 5 и 6. Пусть теперь в начальный момент времени исходное состояние электропривода соответствует фиг. 2 и контуры ограничения скорости с дополни тельными блоками 15, 16, 17 и 19 подключены к известным блокам согласно фиг. 2. При этом для упрощения принимают 0 на выходе блока 19. При поступлении сигнала U с выхода генератора 18 на вход элемента И 17 переходные процессы в электроприводе протекают аналогично описанным до момента времени t . di, Далее производная меняет знак, компаратор срабатьшает и на его выхо де напряжение равно -А. Напряжение -А с выхода блока 16 поступает на вход элемента И 17, причем полярность и величина этого напряжения выбраны таким образом,что прохождение сигнала U блокируется сигна.- лом -А и воздействие результирующег сигнала U на вход блока 13 приводит к отключению управляющего напря жения , ток i резко спадает. В .результате резко уменьшается до нуля электромагнитное тяговое усилие, что приводит к торможению подвижного элемента 4 и значительному уменьшению его скорости в момент соударения г с полюсом 9. Этим и обе печиваётся безударный режим работы электропривода. Изменяя необходимым образом уставку напряжения на выхо116де блока 19, можно настроить электропривод на наиболее рациональный режим. Таким образом, предлагаемый электропривод обладает свойством инвариантности к изменениям параметров электромагнитного исполнительного механизма, противодействующих сил и подвижной массы. Это объясняется тем, что производная тока в явном виде зависит от скорости перемещения подвижного элемента и использование этой производной в качестве управляющего воздействия приводит к требуемому ограничению конечной скорости перемещения независимо от влияния выше упомянутьк возмущений. Формула изобретения 1.Электропривод возвратно-поступательного движения, содержащий линейный электромагнитный двигатель с обмотками прямого и обратного хода и удержания, магнитопроводами, ферромагнитным подвижным элементом и устройство управления, включающее подключенные к обмоткам блоки формирования управляющих импульсов прямого и обратного хода и удержания и связанный с их входами генератор импульсов, отличающийся тем, что, с целью увеличения ресурса путем обеспечения безударного режима при обратном ходе подвижного элемента, электропривод снабжен датчиком производной тока в обмотке обратного хода, источником задающего напряжения, компаратором и элементом И, выходом подключенным к входу блока формирования управляющих импульсов обратного хода, первым входом - к генератору импульсов, вторым - к выходу компаратора, один вход которого соединен с датчиком производной тока, а другой - с источником задающего напряжения. 2.Электропривод возвратно-поступательного движения, содержащий линейный электромагнитный двигатель с обмотками прямого и обратного хода, магнитопроводами, ферромагнитным подвижным элементом и устройство управления, включающее подключенные к обмоткам блоки формирования управляющих импульсов прямого и обратного хода, связанный с их входами генератор импульсов и подключенный к нему 712 блок формирования импульсов удержания отличающийся тем, что, с целью увеличения ресурса путем обеспечения безударного режима при прямом и обратном ходе подвижного элемента, электропривод снабжен вторым блоком формирования импульсов удержания, датчиками производной тока обмоток прямого и обратного хода, двумя источниками задающего напряже5 S f 2 1 8 ниЯj двумя компараторами и двумя элементами И, первые входы которых соединены с выходами генератора импульсов и входами блоков формирования импульсов удержания, вторые - с выходами компараторов, первые входы которьк подключены к датчикам производной тока, а вторые- к источникам задающего напряжения.
жт/
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
| Электропривод | 1980 |
|
SU991557A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Электропривод переменного тока с бесконтактным тахогенератором | 1986 |
|
SU1411912A2 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1390768A1 |
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЭНДОСКОПИЧЕСКОЙ ТЕХНИКИ | 1994 |
|
RU2082309C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
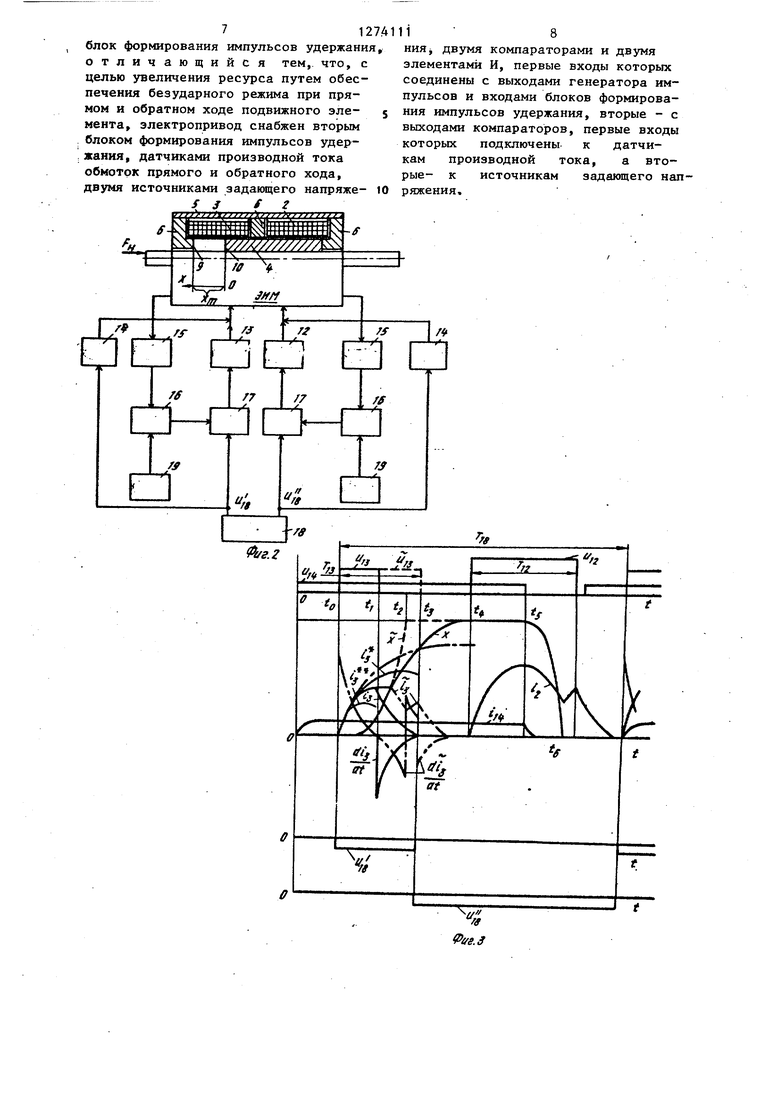
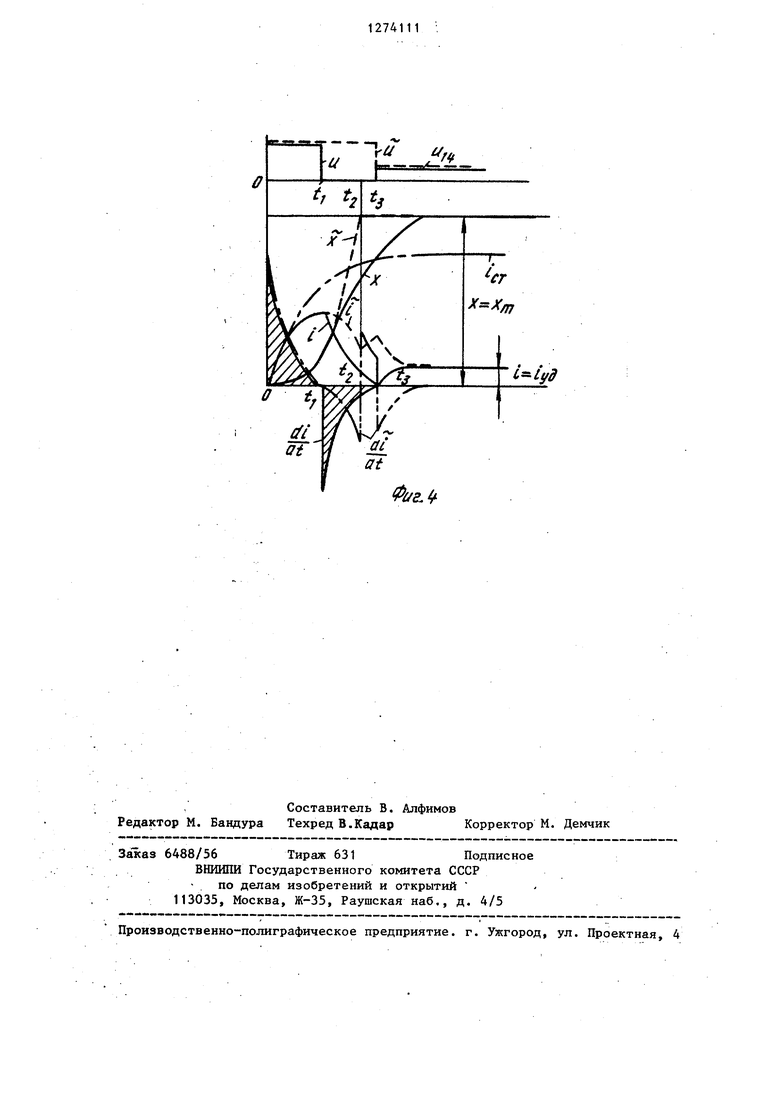
Изобретение относится к управ1лению электрическими машинами. Цель изобретения - увеличение ресурса : электропривода возвратно-поступательного движения путем обеспечения безударного режима работы. Электропривод содержит исполнительный механизм 1 с обмотками 2 и 3 прямого и обратного хода, обмоткой удержания 7, магнитопроводамй 5, 6., 8 и подвижным элементом 4 и устройство управления, включающее блоки формирования управляющих импульсов прямого 12 и обратного 13 хода и удержания 14, датчик 15 производной тока в обмотке, компаратор 16, элемент И 17, генератор импульсов 18, источник, задающего напряжения 19. Электропривод обладает свойством инвариантности к изменениям параметров исполнительного механизма, противодействующих сил и подвижной массы. Это объясняется тем, что производная тока в явном виде зависит от скорости перемещения подвижного элемента и использование (Л этой производной в качестве управляющего воздействия приводит к требуемому ограничению конечной скорости перемещения независимо от возмущений. 4 ил.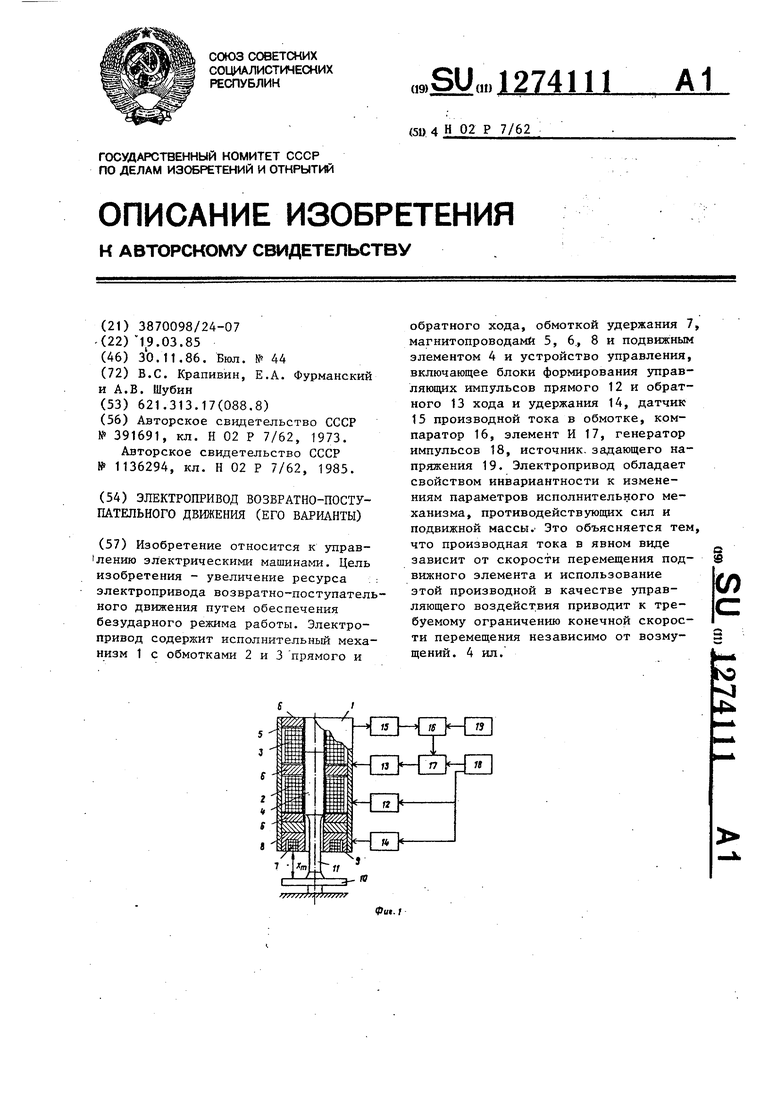
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХОБМОТОЧНЫМ СОЛЕНОИДНЫМ ДВИГАТЕЛЕМ | 0 |
|
SU391691A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
