1
Изобретение относится к управлению электрическими машинами и может быть использовано при создании линейного электропривода напольных и подвесных транспортных устройств.
Цель изобретения - расширение функциональных возможностей путем части 1ной управляемой компенсации веса подвижной части двигателя и груза,
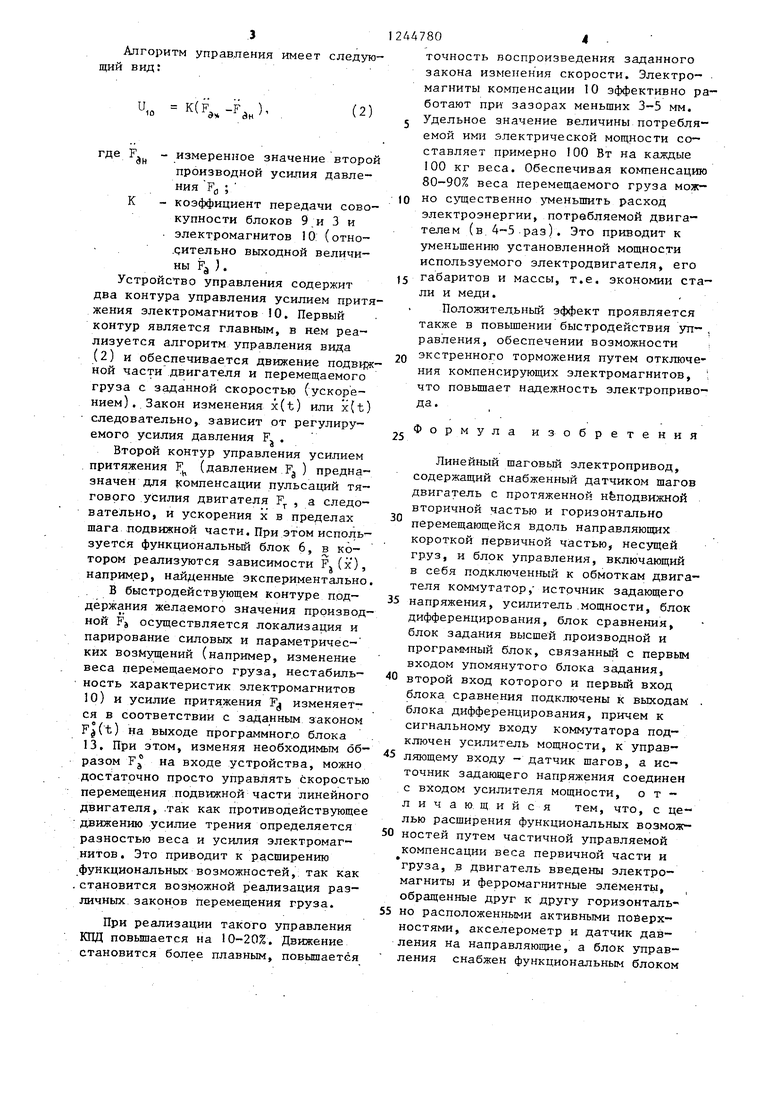
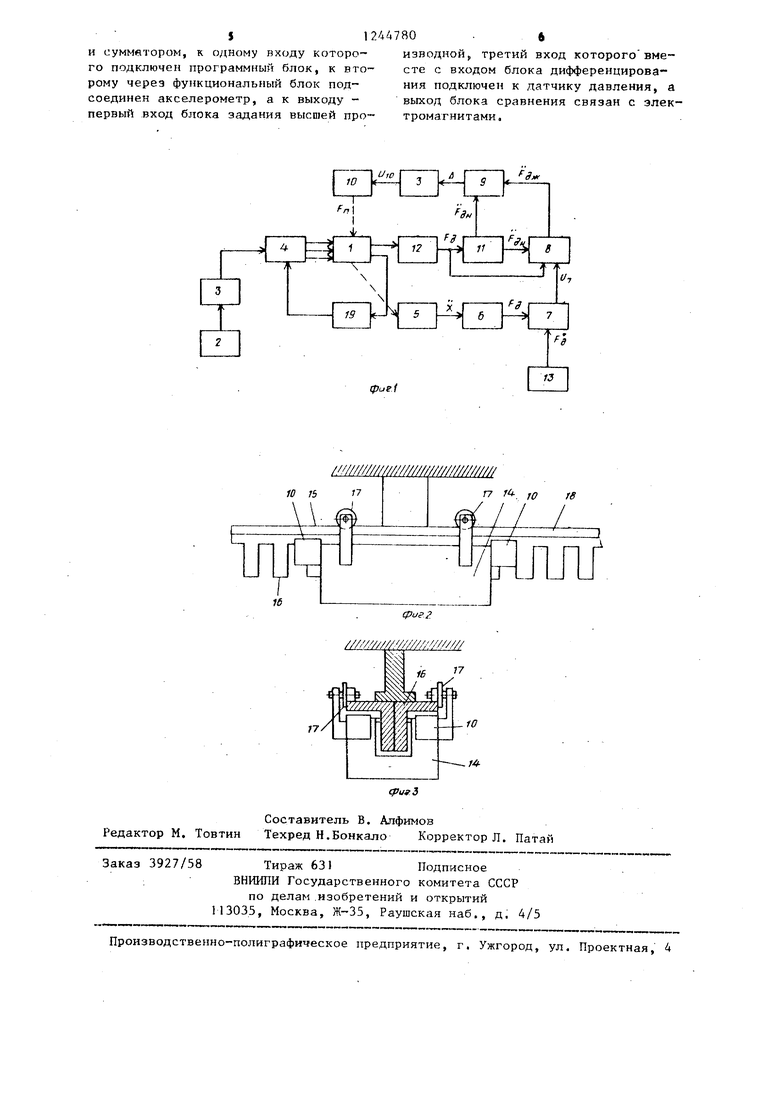
На фиг. 1 показана функциональная схема привода; на фиг. 2 - подвесное транспортное устройство, вид сбоку; на фиг, 3 - то же-, вид спереди.
Электропривод содержит линейный шаговый двигатель 1, последовательно соединенные источник задающих напряжений 2, усилитель мощности 3, коммутатор 4, подключенный к обмоткам двигателя 1, Привод содержит также последовательно соединенные акселерометр 5, функциональный блок 6, сумматор 7, блок задания высшей производной 8, блок сравнения 9, второй усилитель мощности 3 и электромагниты компенсации 10. К другому входу блока сравнения 9 через блок дифференцирования 11 подключен датчик давления 12 перемещаемого груза на направляющие. Другие выходы блока дифференцирования подсоединены к входам блока задания 8;, а к другим входам функционального блока сумматора 7 подсоеди- нены соответственно дополнительный вьщод коммутатора 4 и программный блок 3, Возможность продольного перемещения подвижной части 14 двигателя 1 по направляющим 15, закрепленным на неподвижной части 16, обеспечивается использованием опор качания 17 (колес)о В данном случае электромагниты 10 закреплены на подвижной части 14 двигателя 1, а ферромагнитные элементы 18 - на неподвижной 16. Устройство содержит также датчик шагов 19 двигателя, подключенный к дополнительному входу коммутатора Д.
Программный блок 13 может быть выполнен в виде источника задающего напряжения, функциональный блок-функциональный преобразователь, реализующий экспериментально найденную в пределах одного шага зависимость кор.-л
ректирующего усилия Fa от ускорения X, Эта зависимость приближенно является линейной с зоной Нечувствительности, охватывающей значения х, соответствующие режимам разгона и тормо12447801
жения подвижной части. Таким образом, вносимая функциональным блоком со- ставляквдая усилия электромагнитов компенсирует пульсации х на каждом
5 шаге. Датчик давления 12 может быть тензометрическим, магнитострикцион- ным или пьезоэлектрическим. В качестве акселерометра применяют один из известных, применяемых в испытатель-
10 ной технике
. Устройство работает следующим образом.
Пусть в начальный момент акселерометр 5 отключен, электромагниты 10
15 обесточены, усилие притяжения F между магнитными элементами 10 и 18 отсутствует, а перемещаемый груз всем своим весом Р давит на направляющие 15 (о F макс.)„
20 Нач 1льные сигналы на выходах блоков 11 и б равны нулю. Следовательно, сигнал на выходе, датчика 12 имеет максимальное значение. При подключении усилителя 3 к входам электро25 магнитов на выходе блока сравнения 9 .появляется начальный сигнал рассог- ласования
Ug(o) л(0),
30 которьй затем усиливается усилителем 3 и поступает на обмотки электромагнитов 10 в виде напряжения управления и
В результате по обмоткам протекает
35 ток-и возникает усилие притяжения F. частично, в соответствии с заданной величиной F, компенсирующее вес перемещаемого груза, В соответствии с реализуемым принципом управления по
40 вектору скорости, блок задания фор- мирует желаемое значение F производной выходной величины Fg, например, виде линейной комбинации.
I
45 а,
-T(P ;-F,) - 2d,
Т
ан
(1)
F, Р
50
55
.где Т d..постоянжелаемое значение ной времени;
желаемое значение коэффициента демпфирования; измеренное значение первой производной выходной величины F ;
желаемое значение производной на выходе блока 8; d d.t.
Ug(o) л(0),
которьй затем усиливается усилителем 3 и поступает на обмотки электромагнитов 10 в виде напряжения управления и
В результате по обмоткам протекает
ток-и возникает усилие притяжения F. частично, в соответствии с заданной величиной F, компенсирующее вес перемещаемого груза, В соответствии с реализуемым принципом управления по
вектору скорости, блок задания фор- ирует желаемое значение F производной выходной величины Fg, например, виде линейной комбинации.
I
а,
-T(P ;-F,) - 2d,
Т
ан
(1)
F, Р
.где Т d..постоянжелаемое значение ной времени;
желаемое значение коэффициента демпфирования; измеренное значение первой производной выходной величины F ;
желаемое значение производной на выходе блока 8; d d.t.
Алгоритм управления имеет следующий вид:
и,„ K(F -F. ), 10Э 5н
где F. - измеренное значение второй производной усилия давления РЙ ;
К - коэффициент передачи совокупности блоков 9,и 3 и . электромагнитов 10 (отно- .дительно выходной величины FJ ).
Устройство управления содержит два контура управления усилием притяжения электромагнитов 0. Первый коитур является главным, в нем реализуется алгоритм управления вида
(2) и обеспечивается движение подвгда ной части двигателя и перемещаемого груза с заданной скоростью (ускорением).. Закон изменения x(t) или x(t) следовательно, зависит от регулируемого усилия давления F. .
Второй контур управления усилием притяжения F (давлением Fj ) предназначен для компенсации пульсаций тягового усилия двигателя F , а следовательно, и ускорения X в пределах шага подвижной части. При этом используется функциональный блок 6, в котором реализуются зависимости Р(х), например, найденные экспериментально
В быстродействующем контуре поддержания желаемого значения производной FJ осуществляется локализация и парирование силовых и параметричес- ких возмущений (например, изменение веса перемещаемого груза, нестабильность характеристик электромагнитов 10) и усилие притяжения Fj изменяется в соответствии с заданным з:аконом F|(t) на выходе программного блока 13. При этом, изменяя необходимым образом FJ на входе устройства, можно достаточно просто управлять скоростью перемещения подвижной части линейног двигателя, .так как противодействующее движению усилие трения определяется разностью веса и усилия электромагнитов . Это приводит к расширению функциональных возможностей, так как .становится возможной реализация различных законов перемещения груза.
При реализации такого управления КПД повышается на 10-20%. Движение становится более плавным, повышается
I24A7804 .
точность воспроизведения заданного закона изменения скорости. Электромагниты компенсации 10 эффективно работают при зазорах меньших 3-5 мм,
5 Удельное значение величины потребляемой HMii электрической мощности составляет примерно 100 Вт на каждые 100 кг веса. Обеспечивая компенсацию 80-90% веса перемещаемого груза мож10 но существенно меньшить расход
электроэнергии, потребляемой двигателем (в.4-5-раз). Это приводит к уменьшению установленной мощности используемого электродвигателя, его
)5 габаритов и массы, т.е. экономии стали и меди.
Положител.ьный эффект проявляется также в повышении быстродействия уп- , равления, обеспечении возможности
20 экстренного торможения путем отключения компенсирующих электромагнитов, что повьшзает надежность электропривода.
25
Формула изобретения
30
Линейный шаговый электропривод, содержащий снабженный датчиком шагов двигатель с протяженной неподвижной вторичной частью и горизонтально перемещающейся вдоль направляющих короткой первичной частью, несущей груз, и блок управления, включающий в себя подключенный к обмоткам двигателя коммутатор, источник задающего
35 напряжения, усилитель.мощности, блок дифференцирования, блок сравнения, блок задания высшей .производной и программный блок, связанный с первым входом упомянутого блока задания,
40 второй вход которого и первый вход блока сравнения подключены к выходам блока дифференцирования, причем к сигнальному входу коммутатора подключен усилитель мощности, к управ-
5 ляющему входу - датчик шагов, а источник задающего напряжения соединен с входом усилителя мощности, о т - л и ч а ю. щ и и с я тем, что, с целью расширения функциональных возмож
50 ностей путем частичной управляемой компенсации веса первичной части и груза, .в двигатель введены электромагниты и ферромагнитные элементы, обращенные друг к другу горизонталь55 но расположенными активньгми поверхностями, акселерометр и датчик давления на направляющие, а блок управления снабжен функциональным блоком
и суммвтором, к одному входу которого подключен программный блок, к второму через функциональный блок подсоединен акселерометр, а к выходу первый вход блока задания высшей про- тромагнитами.
(puf3
Составитель В. Алфимов Редактор М. Товтин Техред Н.Бонкало Корректор л. Патай
Заказ 3927/58 Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам .изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
12ДА780 . б
изводнойр третий вход которого вместе с входом блока дифференцирова ния подключен к датчику давления, а выход блока сравнения связан с элек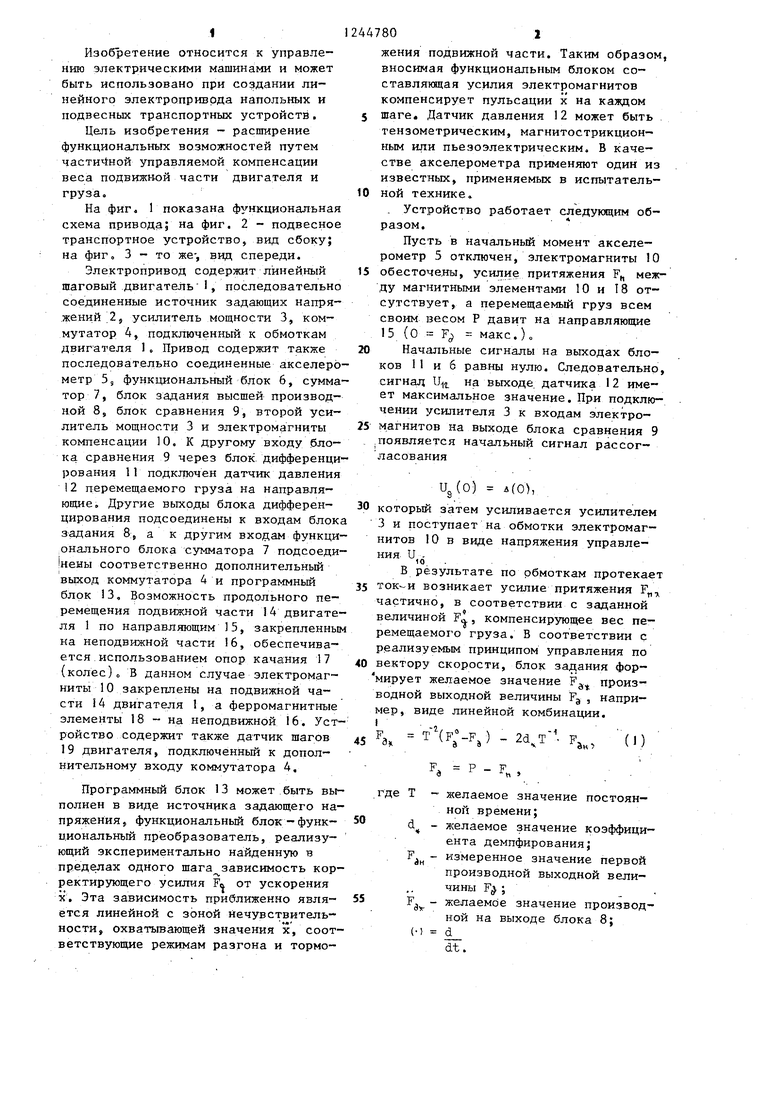
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления линейным шаговым электродвигателем | 1984 |
|
SU1246325A1 |
| Устройство для электромагнитнойпОдВЕСКи фЕРРОМАгНиТНыХ ТЕл | 1979 |
|
SU802786A1 |
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| Устройство для управления линейным электродвигателем постоянного тока | 1979 |
|
SU855916A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения (его варианты) | 1984 |
|
SU1241404A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1985 |
|
SU1274111A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления вибровозбудителем | 1984 |
|
SU1176309A1 |
Изобретение относится к управлению электрическими машинами и направлено на расширение функциональных возможностей линейного шагового электропривода путем частичной управляемой компенсации веса подвижной части двигателя и груза. Привод содержит двигатель 1, последовательно соединенные источник задающих напряжений 2, усилитель мощности 3, коммутатор 4, подключенный к обмоткам двигателя. Привод включает также последовательно соединенные акселерометр 5, функциональный блок 6, сумматор 7,блок задания высшей производной 8,блок сравнения 9, второй усилитель мощности 3 и электромагниты компенсации 10. Блок сравнения 9 через блок дифференцирования 11 связан с датчиком давления 12 перемещаемого груза по направляющим. В начальный момент, когда акселерометр отключен, а электромагниты обесточены, перемещаемый груз всем своим весом давит на направляющие и усилие давления F макс. Изменяя необходимым образом усилие давления, можно управлять скоростью двигателя, так как противодействующее движению усилие трения определяется разностью веса и усилия электромаг нитов . , 3 ил. С е СО
| Устройство для управления линейным электродвигателем постоянного тока | 1979 |
|
SU855916A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления шаговым электродвигателем | 1983 |
|
SU1128363A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
