(54) УСТРОЙСТВО 11ЛЯ УПРАВ. П 1Я ЛИНППНЫМ ЭЛНКТРОДВИГАТЕ.ШД ПОСТОЯ 1ИОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| Линейный шаговый электропривод | 1984 |
|
SU1244780A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |
Изобретение относитея к электротехнике и может быть использовано в машиностроении, электротермии, на транспорте, в химической промышленности, во всех отрасля.х народного хозяйства, где требуется обеспечивать посту 1ательное или возвратно-поступательное пере.мещение деталей, рабочих маханизмов, грузов и т. п.
Известны устройства для управления линейными электродвигателями постоянного тока, содержаш,ие силовую схему питания обмоток - усилитель мощности, дискретную схему распределителя напряжений .между силовыми обмотками и программный блок, подключенный к схеме распредетителя. Такие устройства обеспечивают формирование импульсов напряжения, прикладываемого к силовым обмоткам двигателя с заданными длительностью и частотой следования 1.
Однако эти устройства не позволяют регулировать скорость перемещения якоря (или индуктора) с достаточной точностью, а также фиксировать его в заданном положении. Кроме того, надежность и КПД такого электронривода весьма низки, поскольку при зменении нагрузки и нестабильности ;:пряжелия источника питания система выход1:т из синхронизма что приводит к ненужным затратам энергии или даже срыву рабочего процесса.
.более близким техническим рещеHi.e,; к изобретению является устройство для угго:1вления .линейным электродвигателем постоя 1ного тока, с.одержаи.1,ее усилитель мощности, выпол ;енпьп1 в виде тиристорного преобразователя 1еременного тока, соедине 1ный посредством электронной схемы распределителя с силовыми обмотками двигателя, датчики конечных положений якоря о 1утри силовых обмоток, подключенные к схеме раст,1еде:п1теля и программный блок, представляющий собой схемы регулируемых задержек фронтов управляюп1их импульсов и установок выходного 1:апряжения усилителя мощности. КПД и надежHocib линейного электропривода с таким устройством управления выще, поскольку устройство обеспечивает рабочий процесс, исключающий понижение токов в силовых облютках. Синхронизация импульсов управ,ен:ия в данном устройстве осуп1ествляется автоматически от датчиков конечных положений якоря 2.
Однако данное устройство управления характеризуется низкой точностью регулирования скорости движения якоря и фиксации его в заданном положении, так как система разомкнутая по скорости, снособ регулирования ступенчатый, точность до шага, равного расстоянию между двумя соседними датчиками положения.
Цель изобретения ---- повышение точности регулирования скорости перемещения якоря и фиксации его в заданном положении.
Поставленная цель достигается те.м, что в устройство, содержа шее усилитель мощности, подключенный через распределитель импульсов напряжения к силовым об.моткам электродвигателя, датчики конечных положений активных частей якоря, подключенные к другим входам указанного распределителя, и программный блок, введены датчик перемещения якоря, блок двукратного дифференцирования, блок задания желаемого значения ускорения, соединенные между собой носледовательпо, и блок сравнения, вход которого нодключеп к одному из входов усилителя мощности, .один вход блока сравнения соединен со вторым выходом блока двукратного дифференцирования, другой вход - с выходо.м блока задания желаемого значения ускорения, второй вход которого соединен с выходом датчика перемещения якоря линейного электродвигателя, а третий вход -- с выходом программного блока.
Кроме того, устройство снабжено блоком коррекции, входом подключенным к выходу датчика перемещения якоря линейного электродвигателя, а выходом - к другому входу усилителя мощности.
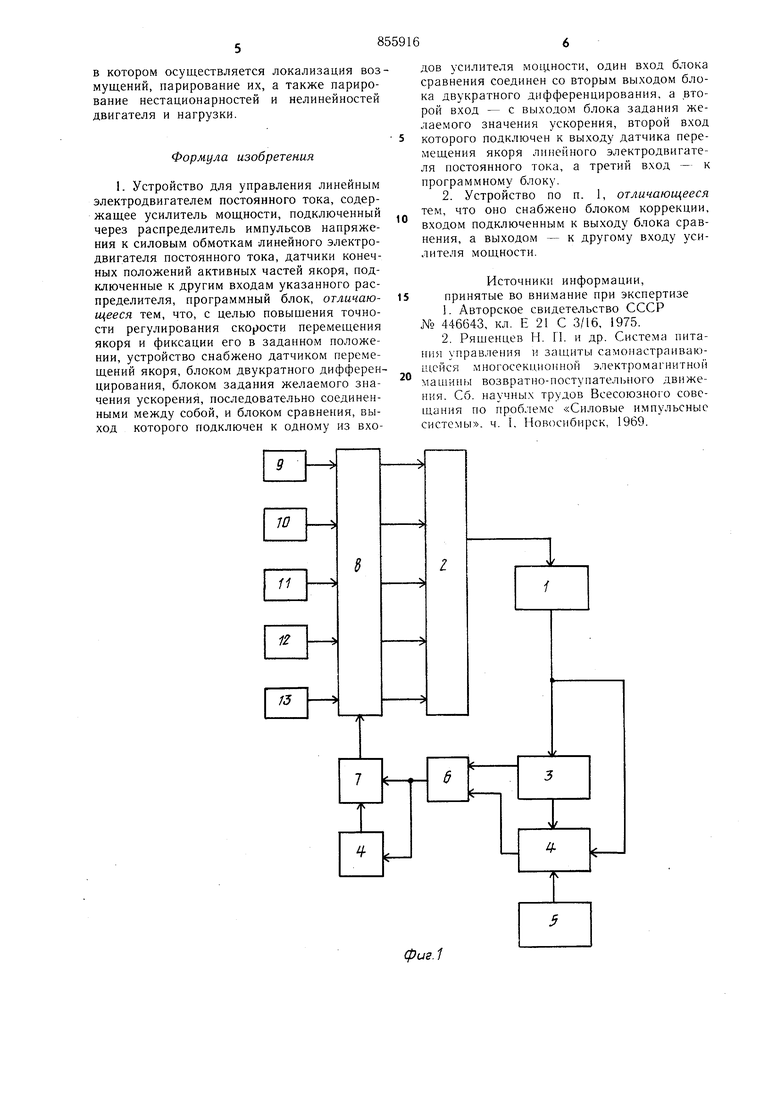
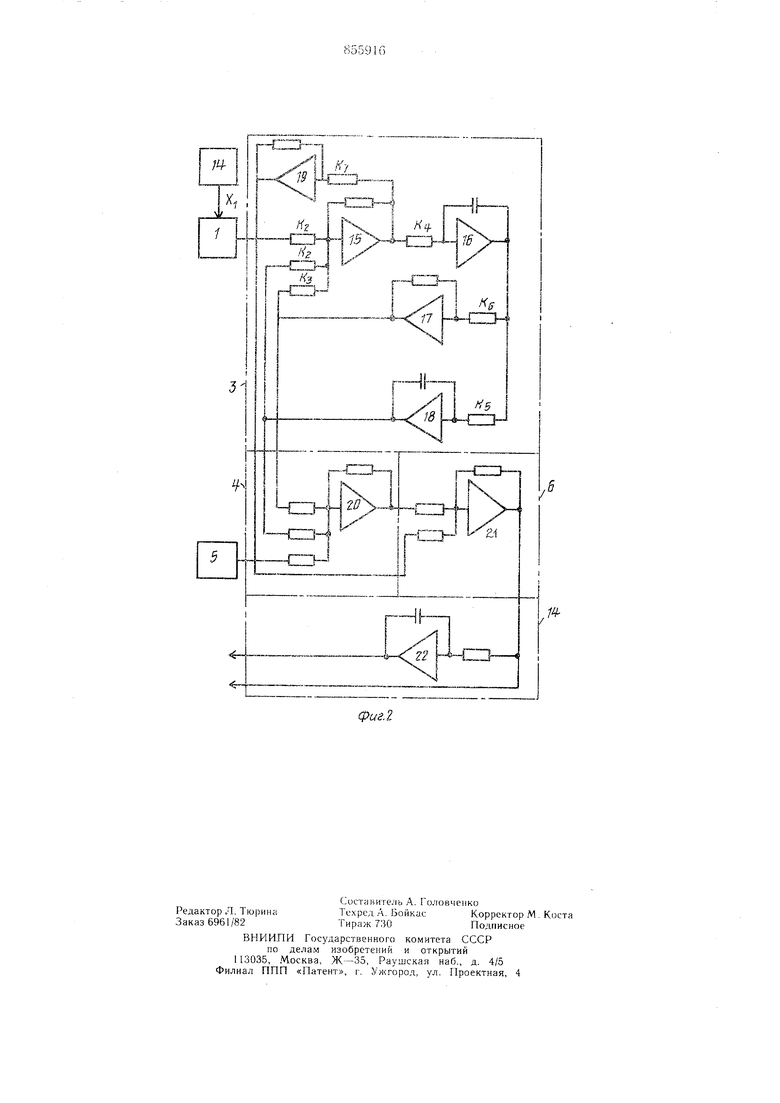
На фиг. 1 изображена функциональная блок-схема устройства; на фиг. 2 - схема соединения вновь введенных элементов.
Устройство управления содержит датчик 1 церемещения якоря линейного электродвигателя 2 ноетоянного тока, соединенный с блоком 3 двукратного дифференцирования, блок 4 задания желаемого значения ускорения, подключенный к датчику 1 перемещения, блоку 3 двукратного дифференцирования, программному блоку 5 и блоку 6 сравнения, усилитель 7 мощности, выполненный с релейной выходной характеристикой, подключенный к блоку 6 сравнения и распределителю 8 импульсов напряжения, датчики 9-13 конечных положений активных частей якоря, а также блок 14 коррекции одного из уровней ограничей выходного папрялсения усилителя 7 мощности, подключенный ко второму входу этого усилителя и блоку 6 еравнения. Линейный электромагнитный двигатель еодержит пять силовых статорных обмоток и якорь, выполненный
в виде чередующихся диа.магнитных и ферромагнитных (актив}1ых) эле.ментов. Якорь линейного электродвигателя при этом же количестве силовых обмоток .может быть выполнен и коротким. Программный блок
представляет собой аналоговую схему задания желаемого закона перемещения, например, в функции времени. Блок дифференцирования (фиг. 2) вынолнеп на пяти усилителях 15--19 с коэффициентами усиления
К-г-Кг. Линейный блок задания желаемого значения ускорения (фиг. 2) выполнен на усилителе 20 постоянного тока, блок сравнения - на усилителе 21, а блок коррекции - на усилителе 22.
Устройство работает следующим образом.
При появлении задающего сигнала Ui:4
c-t на выходе программного блока 5 на
выходе блока 6 сравнения появляется сигнал
рассогласования, который затем усиливает. ся усилителем 7 и через схему расцределителя 8 импульсов напряжения поступает на соответствующую силовую обмотку двигателя. Это приводит к возникновению тягового усилия и пере.мещению якоря. В устройстве реализуется принцип управления но
5 (п-1)-ой производной выходной величины (перемещения якоря), где п - порядок дифференциального управления динамики линейного электродвигателя цостоянного тока. Желаемые динамические свойства системы в целом (устройства управления и двигателя) в данном случае задаются блоком 4, формирующим желаемое значение ускорения как функции перемещения якоря и его скорости (наиример, в виде линейной комбинации). Проявление возмущений (не5 стационарность нагрузки, статические и динамические нелинейности характеристик двигателя) в такой системе локализуется в быстродействующем контуре поддержания (п-)-ой производной, и движение якоря с высокой точностью соответствует задан0 ной Тфограмме U-i U4 ct.
Погрешность воспроизведения заданной программы может быть весьма малой, даже равной нулю, если в устройство управления ввести блок 14 коррекции одного из уровней ограничений выходного напряжения усилителя 7 мощности, например, с нередаточной функцией W|3(P) KV Повышение точносги регулирования скорости перемещения и фиксации якоря устройства обеспечивается тем, что при включении в него блоков 3, 4, б и 13 и усилителя 7 мощности организуется быстродействующий контур поддержания желаемого значения ускорения
(1-3 - 6 ).
в котором осуществляется локализация возмущений, парирование их, а также парирование нестационарностей и нелинейностей двигателя и нагрузки.
Формула изобретения
Источники информации,
5 принятые во внимание при экспертизе
0 машины возвратно-поступательного движения. Сб. научных трудов Всесоюзного совещания по проблеме «Силовые импульсные системы, ч. I. Новосибирск, 1969.
/
