Особенность предлагаемого способа заключается в том, что, с его помощью искомый центральный пункт определяется автоматически. В способе используется то явление, что система подвижных грузов, предоставленная самой себе, обязательно приходит в состояние устойчивого равновесия. Эти особенности обеспечивают большую простоту и надежность способа, а также небольшую затрату времени и простоту манипуляций с любым устройством, служапдим для реализации способа.
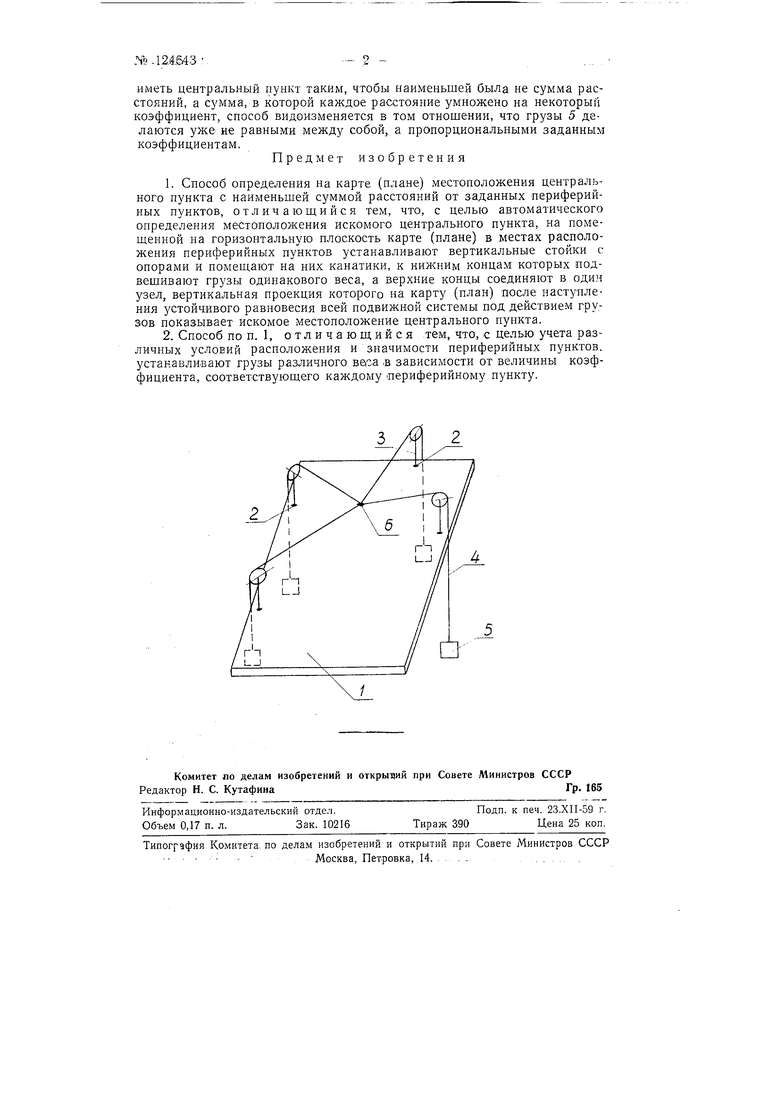
На чертеже схематически изображено одно из таких устройств. На горизонтальную плоскость 1 наносятся пункты 2 соответственно расположению реальных периферийных пунктов на карте местности. В каждом пункте 2 устанавливают стойку с блоком 5; стойка может вращаться вокруг своей вертикальной оси, блок-вокруг своей горизонтальной оси. Через блоки перекидывают гибкие тела (канатики) 4; нижние концы канатиков 4 нагружают грузами 5, верхние концы всех канатиков соединяют в общий узел 6. Все грузы 5 равны между собой. Когда подвижная система, состоящая из гибких элементов (канатиков) 4 с узлом 6 i грузами 5, накладывается на систему блоков 3, узел 6 занимает стучайное положение. Эта подвижная система, будучи предоставлена самой себе, перемещается под влиянием силы тяжести, действующей на грузы 5, и приходит в положение устойчивого равновесия; при этом положении подвижной системы узел б занимает вполне определенное и единственное для данной группы периферийных пунктов положение. Вертикальная проекция этого положения узла 6 на плоскость 1 указывает точку, названную центральным пунктом, с наименьшей суммой расстояний отзаданных периферийных пунктов. В том случае, если желательно
.ЧРЛ2.4МЗ
иметь центральный пункт таким, чтобы наименьшей была не сумма расстояний, а сумма, в которой каждое расстояние умножено на некоторый коэффициент, способ видоизменяется в том отношении, что грузы 5 делаются уже не равными между собой, а пропорциональными заданным коэффициентам.
Предмет изобретения
1. Способ определения на карте (плане) местоположения центрального пункта с наименьшей суммой расстояний от заданных периферийных пунктов, отличающийся тем, что, с целью автоматического определения местоположения искомого центрального пункта, на помещенной на горизонтальную плоскость карте (плане) в местах расположения периферийных пунктов устанавливают вертикальные стойки с опорами и помещают на них канатики, к нижним концам которых подвешивают грузы одинакового веса, а верхние концы соединяют в один узел, вертикальная проекция которого на карту (план) после наступления устойчивого равновесия всей подвижной системы под действием грузов показывает искомое местоположение центрального пункта.
2. Способ по п. 1, отличающийся тем, что, с целью учета различных условий расположения и значимости периферийных пунктов, устанавливают грузы различного веса в зависимости от величины коэффициента, соответствующего каждому периферийному пункту.
i
