1 1
Изобретейие относится к измерительной технике и может быть использовано для измерения больших сил.
Целью изобретения является повышение точности и расширение диапазона измерения.
На фиг. 1 изображено устройство, реализующее предлагаемый способ измерения сил, с упругими элементами разной жесткости, деформированными на одинаковую величину; на фиг. 2 - то же, с элементами,деформированными на разные величины.
Устройство, реализующее способ, состоит из двух зшругих элементов 1 и 2. Упругий элемент 1 меньшей жесткости предварительно отградуирован. Элемент 1 меньшей жесткости входит в элемент 2 большей жесткости, т.е. упругие элементы 1 и 2 установлены параллельно. Между плитой 3, через которую осуществляется действие измеряемой силы на упругие элементы 1 и 2, и плитой 4, размещенной на упругом элементе . 1 меньшей жесткости, установлен кyлaчкoJBый механизм 5. Деформацию упругих элементов 1 и 2 измеряют с помощью преобразователя перемещений.
Предлагаемый способ измерения больших сил реализуется следующим образом.
Под действием измеряемой силы упругие элементы 1 и 2 через плиту 3 деформируют, затем изменяют их деформацию. Поворотом кулачкового механизма 5, установленного между плитами 3 и 4, увеличивают реакцию измеряемой силы на упругий элемент 1 ме йьшей жесткости, и после перераспределения действующих на элементь 1 и 2 сил измеряют деформацию упругого элемента 2 большей жесткости.
Значение измеряемой силы определяют следующим образом.
Под действием измеряемой силы Р упругие элементы 1 и 2 деформируют на величину Х,, которая измеряется. При этом зависимость между силой и перемещением следующая:
Р(С,+С) X,, . (1) где С, - известная жесткость упругого элемента 1 меньшей жесткости;
Cj - жесткость упругого элемента 2 большей жесткости.
47691 2
Чтобы определить силу Р, необходимо второе .уравнение с теми же неизвестными Р и С. Для этого увеличивается реакция измеряемой силы Р на 5 упругий элемент 1 за счет его принудительной деформации на величину 5. В этом случае реакция на упругом элементе 1 равна С(Хд+8). Так как измеряемая сила Р остается постоян- 10 ной, fo реакция на упругий элемент 2 уменьшается на величину С,,-8 , т.е. равна ,). Второе выражение для определения измеряемой силы имеет вид fs (х„+5,)+с(х,+5р. (2)
Таким образом, из выражений (1) и (2) можно оцределить силу Р, кото рая равна
(S,/5, +1). (3)
20 в правой части выражения (3) известны все члены (С определяется при градуировке упругого элемента 1, Х, 1 §2 измеряются с помощью преобразователя перемещений).
25
Формула изобретения
Способ измерения усилий, заключающийся в измерении сшты с помощью 30 двух параллельно включенных в силовую цепь упругих элементов различной жесткости, первый из , имеющий меньшую жесткость, предварительно градзшруют и определяют его жесткость, „ после чего измеряют деформации упругих элементов, по которым судят об измеряемой силе, отличающий- с я тем, что, с целью повышения точности и расширения диапазона измерения, сначала нагружают оба упругих элемента измеряемой силой, измеряя деформацию, затем задают их дополнительную относительную деформацию и повторно измеряют деформацию каждого .- упругого элемента, а значение силы определя19т из соотношения
. ,JJ5 H-lj-C, где Р - измеряемая сила, Н;
Xj, - первоначальная деформация
упругих элементов, мкм; i - повторная деформация первого упругого элемента, мкм; S, - повторная деформация второго
упругого элемента, мкм; С, - жесткость первого упругого элемента, Н/мкм.
40
SO
55
///}
Редактор Л. Веселовская
Заказ 4114/40Тираж 778 Подписное
ВНИИПИ Государственного коьаггета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д./5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. г
Составитель В. Годэиковский Техред;о.Гортвай Корректор С. Шекмар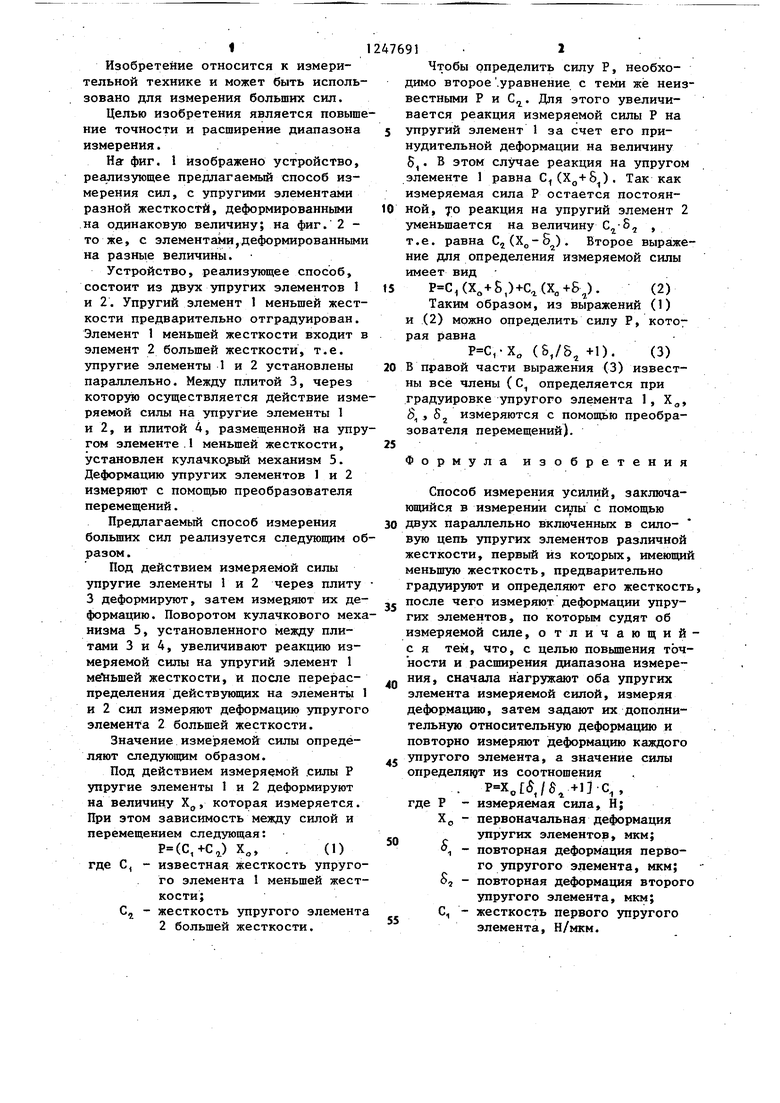
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения силы | 1989 |
|
SU1622782A1 |
| Преобразователь силы маточных сокращений | 1985 |
|
SU1303139A1 |
| Интегральный полупроводниковый преобразователь давления | 1984 |
|
SU1210076A1 |
| Способ возбуждения постоянной силы и устройство для его осуществления | 1988 |
|
SU1642291A1 |
| Способ моделирования горного давления и устройство для его осуществления | 1989 |
|
SU1756561A1 |
| Способ компенсации упругих деформаций технологической системы | 1985 |
|
SU1335415A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Емкостный динамометр | 1985 |
|
SU1345070A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ТЕЛА | 2018 |
|
RU2701794C1 |
| Дифференциальный датчик давления с частотным выходом | 1989 |
|
SU1749734A1 |
Изобретение относится к измерительной технике и позволяет повысить точность и расширить диапазон измерений. Деформируют установленные параллельно упругие элементы 1 и 2 измеряемой силой, определяя величину их деформации. Упругий элемент 1 предварительно градуируют. Затем увеличивают реакцию силы на упругий элемент 1 меньшей жесткости поворотом кулачкового механизма 5 и после ее перераспределения на упругий элемент 2 повторно измеряют с помощью преобразователя перемещений деформацию элементов. Определяют значение, измеряемой силы. Приведено соотношение, из которого вычисляют силу. 2 ил. (О /ТТТУТХ/ ///// Фиг.1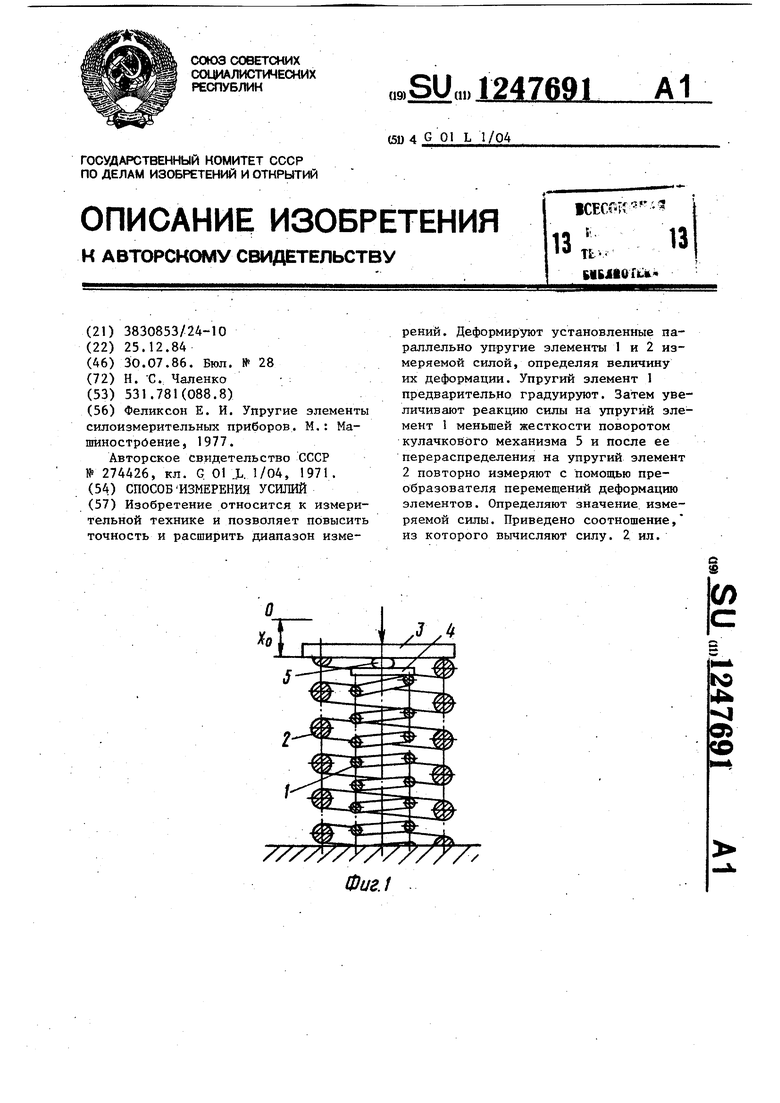
| Феликсон Е | |||
| И | |||
| Упругие элементы силоизмерительных приборов | |||
| М.t Ма- пганострбение, 1977 | |||
| СПОСОБ ИЗМЕРЕНИЯ БОЛЬШИХ СИЛ | 0 |
|
SU274426A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
