Изобретение относится к подшипниковой промышленности и может быть использовано преимущественно для контроля технического состояния подшипниковых узлов.
Цель изобретения - повьш1ение точности контроля путем учета зазора в подшипниковом узле.
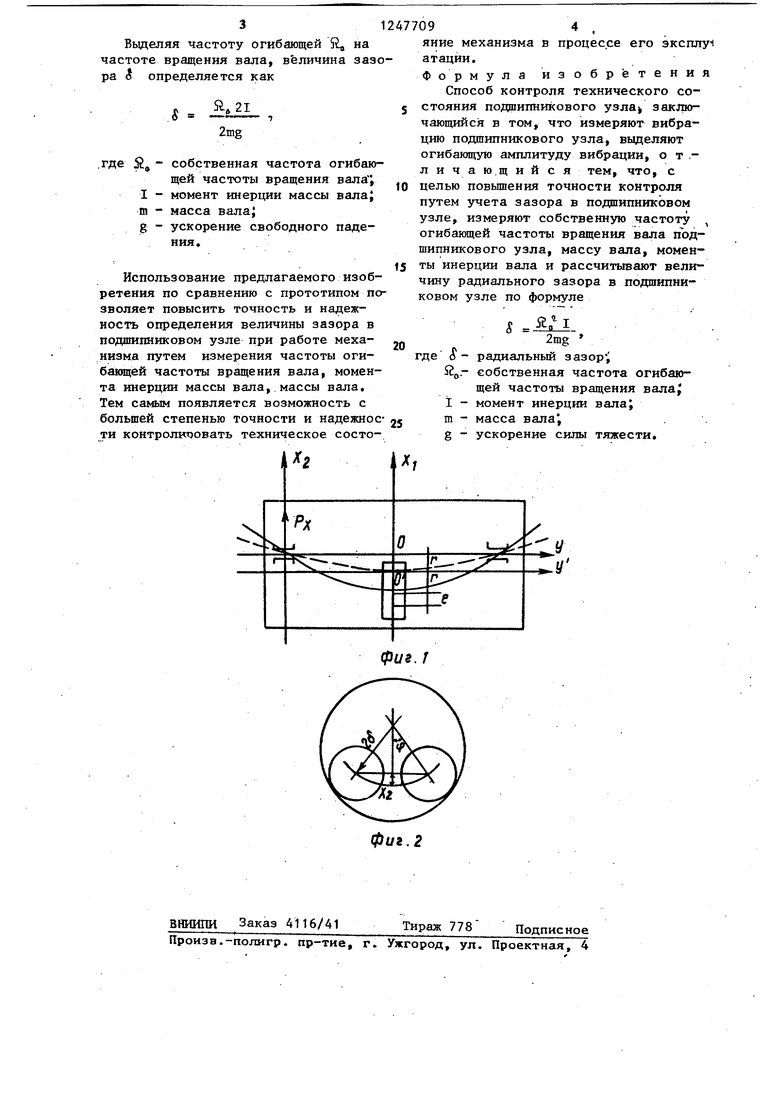
На фиг.1 показана общая принципиальная схема колебаний вала в опорах скольжения, на фиг.2 - схема ко- лебанид вала непосредственно в зазоре подшипника скольжения.
Вертикальнь1е колебания вала, массой m при вращении в подшипниках скольжения с зазором состоят из двух составляющих: колебаний, обусловленных действием центробежных сил и упругости вала г и колебаний вала в зазоре подшипника Х. Тогда общие колебания массы вала в вертикальной плоскости равны сумме этик колебаний
247709
10
15
где - величина зазора}
Ч - угол отклонения вала , Si-Q- собственная частота колебаний вала в зазореJ - фаза.
Собственная частота колебаний вала в зазоре определяется путем представления колебаний вала в зазоре как колебаний физического маятника. При этом колебания вала происходят вокруг точки подвеса, удаленной от центра масс вала на величину, равную 2 1 , где S - величина зазора в подшипнике. Тогда, определив момент инерции массы вала относительно этой точки и массу вала, собственная частота колебаний вала в зазоре определяется как
20
5.
(6)
г(г+Х)е
jut
(1)
где и - частота вращения.
Колебания вала под действием центробежной сипы и силы упругости происходят относительно ОСИ У , смещенной от центральной оси У на величину статического прогиба вала г определяемого как
г„ mg/c.
(2)
где с - жесткость вала.
Амплитуда колебаний г относительно оси У находится из равенства восстанавливающей и центробежной силы
(3)
1
где Wj 4-первая собственная -час- тота изгибных колебаний
вала.
Амплитуда колебаний массы вала X определяется -из уравнения
, , тХ,+с() 0, (А)
где X - колебания вала в зазоре
подшипника.
Величина Х определяется исходя из схемы колебаний вала в зазоре подшипника как
(1-cos4)e
)
(5)
где
- величина зазора в подшипнике;
m
- масса вала, I - момент инерции массы вала. Подставляя (5) в (4) и решая уравнение находят Х| как
-- 2(1-cos4)e
Л - ..
|()
1(-): (Jo
(7)
5
0
Учитывая, что ( ). «1, выражение (7) принимает вид
Х 2i(1-cos4)eJ(« (8)
1, Подставляя зависимости (3) и (8) в (1), получают
(Wfi)
V /,
1+ke
(й
Т)1 jut
,(9)
45
где к - числовой коэффициент. Тогда возмущающая сила, действующая в опоре подшипника, равна
РХ
сг
се
Inkei - V dO) (-)-1 1 -1
Таким образом, частотный спектр воз-- мущакнцей силы, действующей в опоре подшипника, содержит огибающую частоты вращения вала, т.е. модулирован- кую частотой Si частоту вращения и. Ввиду того, что вибрационньй сигнал пропорционален величине силы, то он также содержит модулированную частотой Лд частоту вращения вала и .
Выделяя частоту огибающей 5 на частоте вращения вала, величина зазора Л определяется как
S. собственная частота огибающей частоты вращения вала
I - момент инерции массы вала
m - масса вала}
g - ускорение свободного падения.
Использование предлагаемого изобретения по сравнению с прототипом позволяет повысить точность и надежность определения величины зазора в подшипниковом узле при работе механизма путем измерения частоты оги- бшощей частоты вращения вала, момента инерции массы вала, массы вала. Тем самым появляется возможность с больщей степенью точности и надежное- ти контролдазовать техническое состо0
5
0
5
яние механизма в процессе его эксплун
атации.
Формула изобретения
Способ контроля технического состояния подщипникового узла заключающийся в том, что измеряют вибрацию подшипникового узла, выделяют огибающую амплитуду вибрации, о т .- личающийся тем, что, с целью повышения точности контроля путем учета зазора в подшипниковом узле, измеряют собственную частоту огибающей частоты вращения вала пЪд- шипникового узла, массу вала, моменты инерции вала и рассчитывают величину радиального зазора в подшипниковом узле по формуле
S
где S- радиальный зазор
.- собственная частота огибающей частоты вращения вала; i - момент инерции вала; m - масса вала , g - ускорение силы тяжести.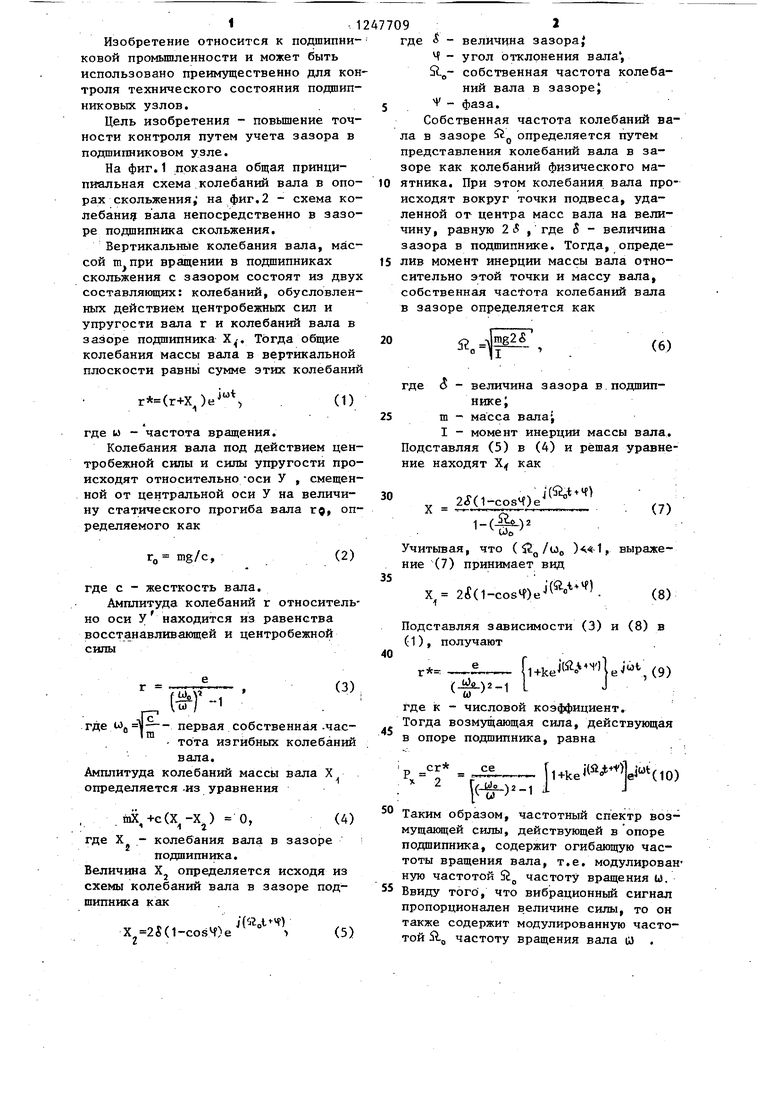
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля технического состояния подшипникового узла | 1987 |
|
SU1423926A2 |
| Способ контроля технического состояния подшипникового узла | 1986 |
|
SU1345086A1 |
| Способ контроля качества сборки подшипниковых узлов | 1986 |
|
SU1388739A1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2528789C1 |
| ВИБРАЦИОННАЯ ИЗМЕЛЬЧИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2604005C1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2599077C1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2578500C1 |
| Электромеханическое устройство с повышенным кинетическим моментом ротора-маховика (варианты) | 2022 |
|
RU2796643C1 |
| Способ управления охлаждением высокоскоростного мотор-шпинделя металлорежущего станка | 2017 |
|
RU2636209C1 |
| РОТОРНЫЙ МЕХАНИЗМ ЦЕНТРОБЕЖНОЙ УСТАНОВКИ | 2000 |
|
RU2183136C1 |
Изобретение относится к контролю технического состояния подщипни- кового узла и позволяет повысить точность контроля подшипниковых узлов за счет учета зазора в подшипниковом узле. Для этого радиальный зазор рассчитывают по собственной частоте огибаклцей частоты вращения вала, моменту инерции вала и массе вала.2 tai. N9 4 VI sl
фиг. J
ВНИИПИ Заказ 4116/41
Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
фиг. 2
Тираж 778
Подписное
город, ул. Проектная, 4
| Авторское свидетельство СССР ,№ 868416, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
