Изобретение относится к технике измерения скорости текучих сред и может быть использовано для измерения интегральной скорости течения в океане при проведении океанографических исследований.
Цель изобретения повышение достоверности измерения интегральной по глубине скорости течения в океанах и морях.
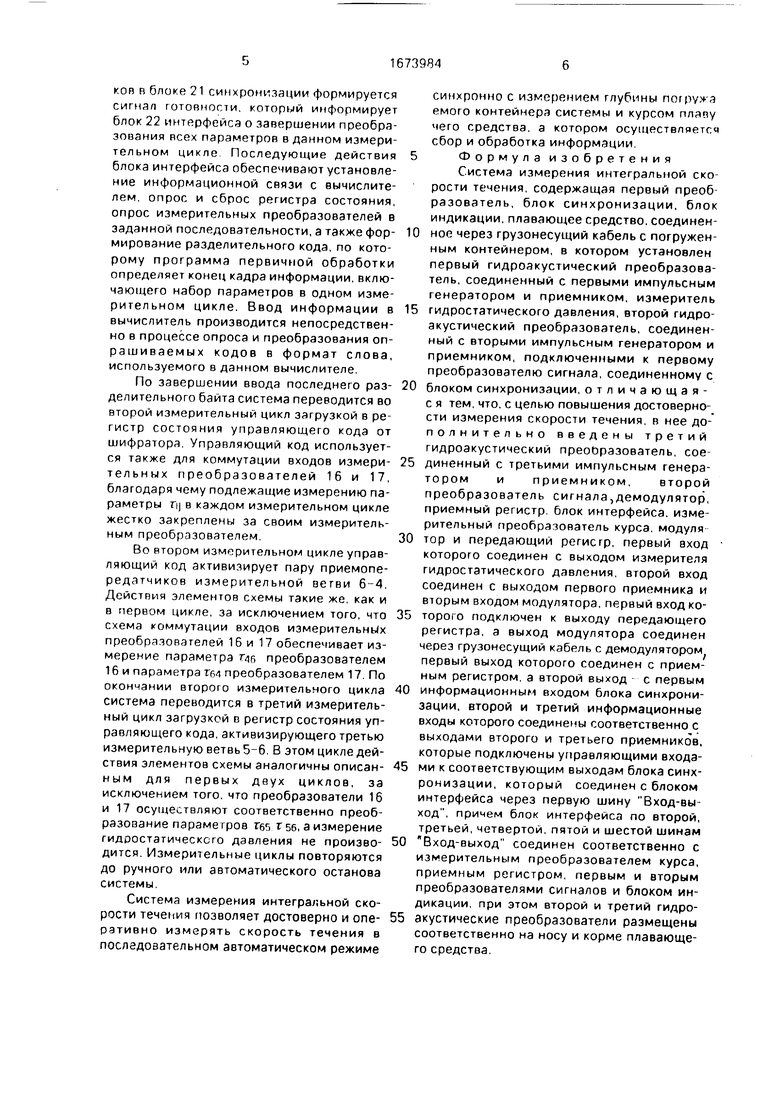
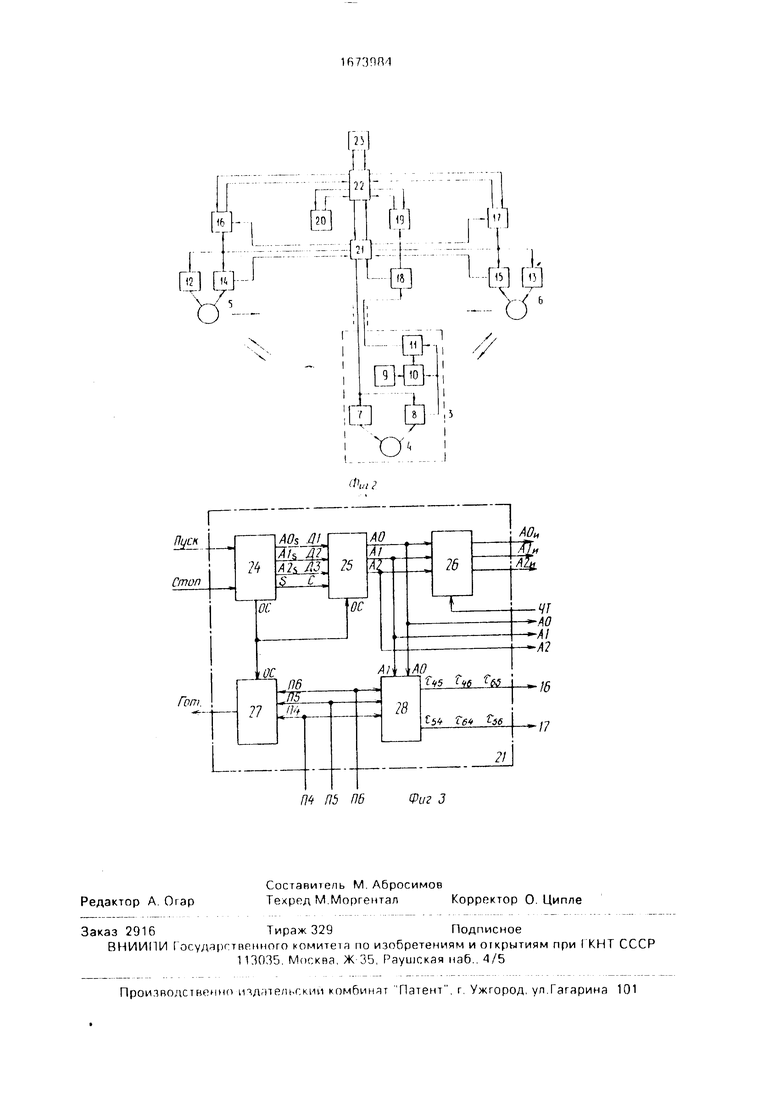
На фиг. 1 изображена система измерения интегральной скорости течения при работе с плавучего средства; на фиг. 2 - структурная схема системы; на фиг. 3 - схема блока синхронизации
Система измерения интегральной скорости течения используется на плавучем средстве 1 и содержит бортовую аппаратуру и опускаемый на грузонесущем кабеле 2 погружаемый контейнер 3, на котором установлен первый гидроакустический преобразователь А. Аналогичные второй и третий гидроакустические преобразователи 5 и 6 опускаются на кабелях с носа и кормы плавучего средства в приповерхностный слой океана.
Схема соединения элементов погружаемого контейнера 3 содержит первый импульсный генератор 7, первый приемник 8, изм еритель 9 гидростатического давления, передающий регистр 10 и модулятор 11. Управляющие входы импульсного генератора 1 и приемника 8 объединены и подключены к управляющей жиле грузонесущего кабеля 2.
Схема элементов бортовой аппаратуры (фиг. 2) включает второй и третий импульсные генераторы 12 и 13, второй и третий приемники 14 и 15, первый и второй измерительные преобразователи 16 и 17 демоду- лятор 18, приемный регистр 19, измерительный преобразователь 20 курса, блок 21 синхронизации, блок 22 интерфейса и вычислитель 23
Блок 21 синхронизации образуют схема 24 формирования управляющего кода, регистр 25 состояния системы, передающая вентильная схема 26, схема 27 формирования сигнала Гоювность и коммутатор 28 входов измерительных преобразователей 16 и 17. Первый и второй управляющие входы схемы 24 являются элементами формирования сигналов ручного и автоматического пуска и останова блока 21 синхронизации
Блок 22 интерфейса реализует приборные и интерфейсные функции между измерительным оборудованием системы и вычислителем Приборные функции блока интерфейса реализованы следующим образом.
Информационный вход блока 22 интерфейса образован 8-разрядной шиной, общей для информационных выходов измерительных преобразователей 16 и 17,
приемного регистра 19 кода измерителя гидростатического давления, измерительного 20 преобразователя курса,регистра со- стояния в блоке 21 синхронизации и формирователя разделительного байта в
блоке 22 интерфейса. Общая шина реализована при помощи передающих 8-разрядных вентильных схем на выходе измерительных преобразователей Все вентильные схемы общей шины управляются сигналами Чте5 ние, аналогичными одноименному сигналу в блоке 21 синхронизации, которые формируются в заданном порядке схемой коммутации каналов, реализованной при помощи связанных между собой мультивибратора,
0 счетчика импульсов и мультиплексора.
Система измерения интегральной скорости течения работает следующим образом.
Гидроакустические преобразователи
5 (кормовой, носовой и погружаемый) образуют три измерительные ветви, в которых из- лучатели и приемники акустических сигналов работают попарно-последовательно в три такта:излучение и прием встречных
0 сигналов Нос плавучего средства - контейнер (), Корма плавучего средства - контейнер (6-4) и Нос-корма плавучего средства (5-6). Управление парами излучателей - приемников производится в после5 довательные моменты времени кодом, значения которого генерируются блоком 21 синхронизации.
По окончании измерительного цикла в каждой ветви управляющий код вместе с
0 измерительной информацией через блок 22 интерфейса вводится в вычислитель 23, после чего сбрасывается и заменяется новым значением.
Пуск системы производится управляю5 щим сигналом в момент времени to при выполнении операции ручного пуска. При этом в регистр состояния блока 21 синхронизации записывается управляющий код. активизирующий пару излучатель-приемник
0 измерительной ветви 5-4. По передним фронтам сигналов приемников измерительные преобразователи заканчивают преобразование параметров Г45 и г 54 (времена распространения встречных акустических
5 сигналов). Одновременно по переднему фронту сигнала приемника контейнера организуется цикл сьемэ и передачи по кабелю кода измерителя гидростатического давления. По окончании действия любых двух из трех возможных сигналов приемников в блоке 21 синхронизации формируется сигнал готовности, который информирует блок 22 интерфейса о завершении преобразования всех параметров в данном измерительном цикле. Последующие действия блока интерфейса обеспечивают установление информационной связи с вычислителем, опрос и сброс регистра состояния, опрос измерительных преобразователей в заданной последовательности, а также формирование разделительного кода, по которому программа первичной обработки определяет конец кадра информации, включающего набор параметров в одном измерительном цикле. Ввод информации в вычислитель производится непосредственно в процессе опроса и преобразования опрашиваемых кодов в формат слова, используемого в данном вычислителе.
По завершении ввода последнего разделительного байта система переводится во второй измерительный цикл загрузкой в регистр состояния управляющего кода от шифратора. Управляющий код используется также для коммутации входов измерительных преобразователей 16 и 17, благодаря чему подлежащие измерению параметры rij в каждом измерительном цикле жестко закреплены за своим измерительным преобразователем.
Во втором измерительном цикле управляющий код активизирует пару приемопередатчиков измерительной ветви 6-4. Действия элементов схемы такие же. как и в первом цикле, за исключением того, что схема коммутации входов измерительных преобразователей 16 и 17 обеспечивает измерение параметра преобразователем 16 и параметра тм преобразователем 17. По окончании второго измерительного цикла система переводится в третий измерительный цикл загрузкой в регистр состояния управляющего кода, активизирующего третью измерительную ветвь 5-6. В этом цикле действия элементов схемы аналогичны описан- ным для первых деух циклов, за исключением того, что преобразователи 16 и 17 осуществляют соответственно преобразование параметров res г 56, а измерение гидростатического давления не производится. Измерительные циклы повторяются до ручного или автоматического останова системы.
Система измерения интегральной скорости течения позволяет достоверно и оперативно измерять скорость течения в последовательном автоматическом режиме
синхронно с измерением глубины погружа емого контейнера системы и курсом пляву чего средства, а котором осуществляется сбор и обработка информации. 5Формула изобретения
Система измерения интегральной скорости течения, содержащая первый преобразователь, блок синхронизации, блок индикации, плавающее средство, соединен- 0 ное через грузонесущий кабель с погруженным контейнером, в котором установлен первый гидроакустический преобразователь, соединенный с первыми импульсным генератором и приемником, измеритель
5 гидростатического давления, второй гидроакустический преобразователь, соединенный с вторыми импульсным генератором и приемником, подключенными к первому преобразователю сигнала, соединенному с
0 блоком синхронизации, отличающая- с я тем, что, с целью повышения достоверности измерения скорости течения, в нее до- полнительно введены третий гидроакустический преобразователь, сое5 диненный с третьими импульсным генератором и приемником, второй преобразователь сигнала,демодулятор, приемный регистр, блок интерфейса, измерительный преобразователь курса, модуля
0 тор и передающий регистр, первый вход которого соединен с выходом измерителя гидростатического давления, второй вход соединен с выходом первого приемника и вторым входом модулятора, первый вход ко5 торого подключен к выходу передающего регистра, а выход модулятора соединен через грузонесущий кабель с демодулятором первый выход которого соединен с приемным регистром, а второй выход с первым
0 информационным входом блока синхронизации, второй и третий информационные входы которого соединены соответственно с выходами второго и третьего приемников, которые подключены управляющими входа5 ми к соответствующим выходам блока синхронизации, который соединен с блоком интерфейса через первую шину Вход-выход, причем блок интерфейса по второй, третьей, четвертой, пятой и шестой шинам
0 Вход-выход соединен соответственно с измерительным преобразователем курса, приемным регистром, первым и вторым преобразователями сигналов и блоком индикации, при этом второй и третий гидро5 акустические преобразователи размещены соответственно на носу и корме плавающего средства.
w-1
i
И Ы f
ъл - 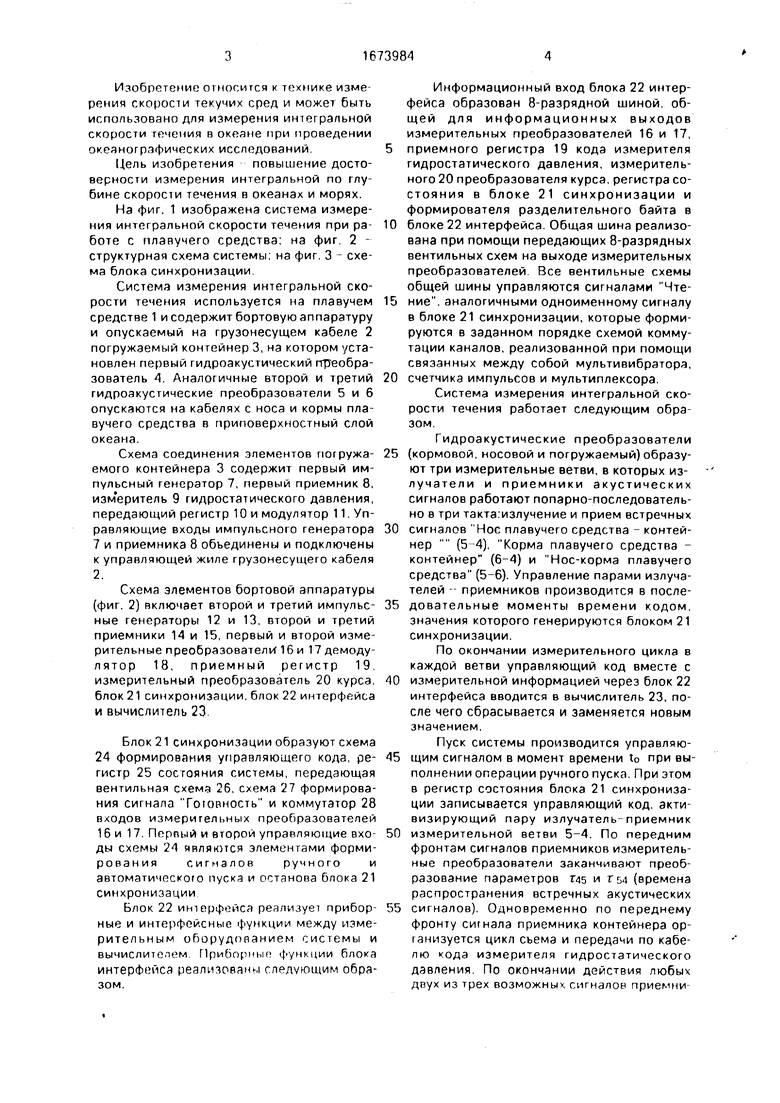
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения интегральной скорости течения | 1980 |
|
SU1084683A1 |
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| Устройство для измерения вертикальной скорости движения воды в стратифицированных водоемах | 1989 |
|
SU1644040A1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
Изобретение относится к технике измерения скорости текучих сред и может быть использовано для измерения интегральной скорости течения в океане при проведении океанографических исследований. Целью изобретения является повышение достоверности измерения интегральной по глубине скорости течения в океанах и морях. Система измерения интегральной скорости течения используется на плавучем средстве 1 и содержит бортовую аппаратуру для обработки информации, опускаемый на грузонесущем кабеле 2 погружаемый контейнер, на котором установлен один из трех гидроакустических преобразователей. Два других гидроакустических преобразователя опускаются с носа и кормы плавучего средства в приповерхностный слой океана. Три гидроакустических преобразователя образуют три измерительные ветви, в которых излучатели и приемники акустических сигналов работают попарно-последовательно в три такта. Управление системой осуществляется с помощью блока синхронизации. Блок интерфейса реализует приборные и интерфейсные функции между блоками системы и вычислителем. Система измерения интегральной скорости течения позволяет достоверно и оперативно измерять скорость течения в последовательном автоматическом режиме синхронно с измерением глубины погружения контейнера системы и курсом плавучего средства. 3 ил.
| Парамонов А | |||
| Н | |||
| и др | |||
| Современные методы и средства измерения гидрологических параметров океана | |||
| Киев, 1979 | |||
| Устройство для измерения интегральной скорости течения | 1980 |
|
SU1084683A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
