эталонного напряжения и выходом RC- сетки 1 соответственно, третий вход блока 12 определения окончания переходного процесса подключен к инверсному выходу первого генератора 10 импульсов, выход блока 12 соединен с первым входом блока 13 оптимизации, второй и третий входы которого подключены к прямому и инверсному выходам первого генератора 10 импульсов соответственно, четвертый вход блока 13 оптимизации, как и второй вход цифрового блока 14 регулируемой задержки, подключен к выходу второго генератора 11 импульсов, выход блока 13
Изобретение относится к гибридной вычислительной технике и предназначено для автоматического решения задач оптимального по быстродействию управления системами с распределительными параметрами при наличии множеств ограничений на входные и выходные координаты.
Цель изобретения - повышение точ- 1НОСТИ моделирования.
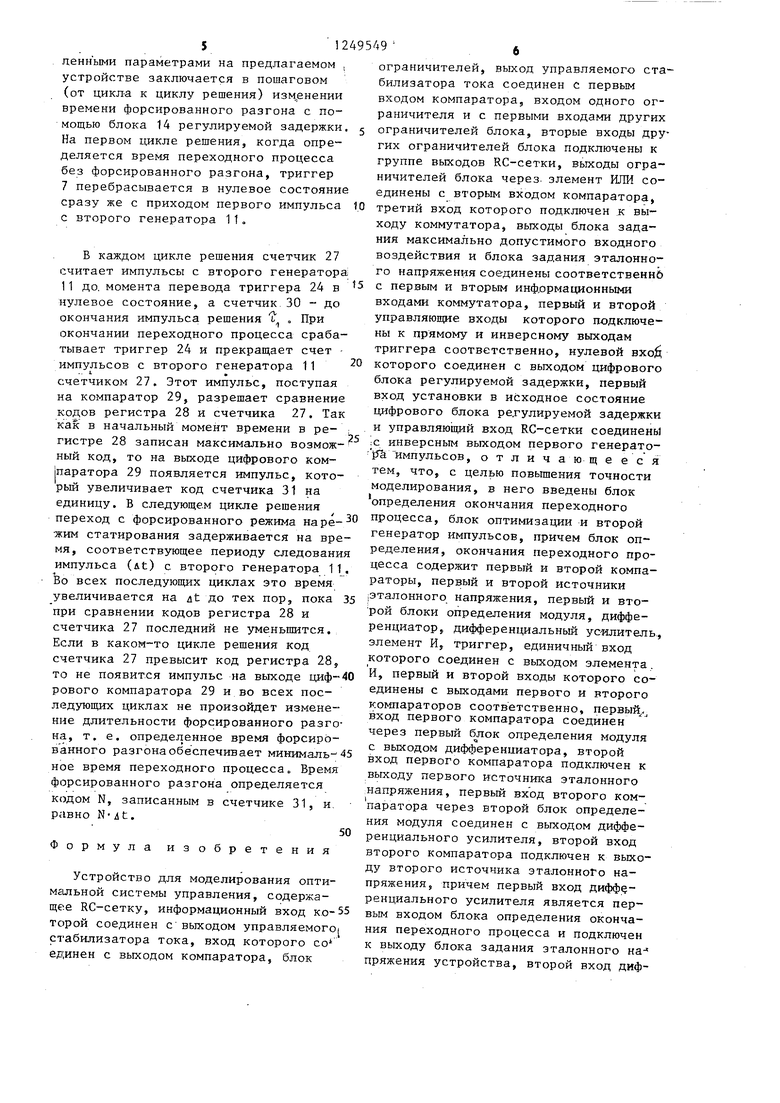
На фиг.1 изображена функциональная схема устройства для моделирования оптимальной системы управления на фиг.2 - временные диаграммы, поясняющие его работу.
Устройство содержит RC-сетку 1 вместе с блоком задания начальных у,С ловий, управляемый стабилизатор 2 тока, компаратор 3, коммутатор 4, блок 5 задания максимально допустимого входного воздействия, блок 6 задания эталонного напряжения, триггер 7, блок 8 ограничителей, элемент ИЛИ 9, первый генератор 10 импульсов, второй генератор 11 импульсов, блок 12 определения окончания переходного процесса, блок 13 оптимизации, цифровой блок 14 регулируемой задержки.
Блок 12 определения окончания переходного процесса содержит дифференциатор 15, первый блок 16 определения модуля, первый источник 17 эталонного напряжения, первый компаратор 18, второй компаратор 19, второй источник 20 эталонного напряжения, второй
оптимиза1Д1и соединен с третьим входом цифрового блока 14 регулируемой задержки. Введение в устройство дополнительных блоков и связей между ними обеспечивает поиск оптимального управления, исходя из минимизации времени переходного процесса при переводе объекта из начального установившегося состояния в заданное конечное, что позволяет повысить точность решения. Устройство может быть использовано для определения оптимального по быстродействию программного управления для теплофизического объекта . 2 ил.
блок 21 определения модуля, диффере: циальный усилитель 22, элемент И 23, ;Триггер 24.
Блок 13 оптимизации содержит диф- .ференцирующую цепочку 25, элемент И 26, счетчик 27, регистр 28, цифровой компаратор 29. Цифровой блок 14 регулируемой задержки содержит первый счетчик 30, второй счетчик 31, цифровой компаратор 32.
RC-сетка 1 является основным блоком устр.ойства, состоит из узловых емкостей и резисторов и включает в себя блок задания начальных условий. В результате интегрирования исходных уравнений на RC-сетке 1 формируется текущее значение вектора состояния 1управляемого объекта.
Блок 8 ограничителей состоит из отдельных независимьпс ограничителей, причем порог срабатывание каждого из них равен напряжению, соответствующему допустимой скорости изменения входной регулируемой величины для .-ог- раничителя 8,1 или допустимому уровню температурного градиента для заданных точек для огран;чителей о-. 8.2 до 8.k.
Блок 12 служит для определения момента времени окончания переходного процесса. Перевод объекта из одного в другое установившееся состояние нэ фазовой плоскости (х, и х), где
dU
и.
- и.
X ,
trr
ч dt - напряжение, соответсти.г-„ tT кт
причем (Uj.
вующёе температуре статирования напряжение, соответствующее температуре в контрольной точке), представляет собой перевод изображающей точки из некоторого исходного состояния в некоторую Е-окрестность начала координат (I х Е и I Xj I Е) . Момент попадания изображающей точки фазовой траектории в Е-окрестность классифицируется блоком 12 как момент окончания переходного процесса, т„ е. выхода объекта в режим.
Блок 13 оптимизации служит для реализации алгоритма поиска времени форсажного разгона, при котором обеспечивается минимальное время переходного процесса. После каждого перевода объекта из начального состояния в конечное блок 13 произодит сравнение времени переходного процесса для пре- дьщущего и текущего циклов решения.
и триггер 24 в единичное состояние, . также производит перезапись кода с выхода сметчика 27 в регистр 28. Пе-/ редким фронтом импульса решения и
5 с прямого выхода первого генератора импульсов производится установка триг гера 7 в единичное состояние и через дифференцирующую цепочку 25 счетчик 27 сбрасывается в нуль. Под действием
to импульса с единичного выхода триггера 7 коммутатор 4 подключает выход блока 5 задания максимально допустимого входного возмущения к входу компаратора 3, а выход блока 5 задания эта15 лонного напряжения при этом отключается. На остальных входах компаратора 3 напряжения в начальный момент времени равны нулю. Таким образом, компаратор 3 переводит управляемый
20 стабилизатор 2 тока на полную мощность, определяя тем самым начало форсированного выхода объекта в режим. На второй и третий входы компа-. ратора 3 поступают сигналы отрицательВ результате сравнения блок 13 прини- ° обратной связи с выхода и входа мает одно из двух решений. Если выпол- КС-сетки 1..При этом.компаратор 3 пе- няется условие, что время переходного ребрасывается в другое состояние в процесса в текущем цикле меньше аре- случаях: при достижении предель- мени переходного процесса в предьщу- «о допустимого значения напряжения
30 на входе объекта или при срабатьшании хотя бы одного из ограничителей блока 8. Последний срабатывает при пре- вьшгении градиента любой выходной точки объекта относительно входной или
щем цикле, то увеличивается время форсажного разгона на временной шаг и осуществляется следующий цикл решений. Если условие не выполняется, то это означает, что время переходного
процесса при найденном времени форсаж-35 превьшгении допустимой величины
ного разгона является минимальным.
Цифровой блок 14 регулируемой задержки служит для задания в процессе Поиска времени форсированного разго- ,на, т. е. момента переключения управления с форсированного разгона в режим статирования.
Устройство работает следующим об- р азом. :
Рассмотрим работу устройства, где ,в качестве объекта управления возь- мем, например, термостатирующее устройство.
До начала работы оператор устанав- ливает счетчик 31, определяющий время задержки, в нулевое состояние и записывает в счетчик 27 максимально возможный код.
Импульс подготовки f с инверсно-55 его входных и выходных координат до го выхода первого генератора импуль- окончания переходного процесса. сов устанавливает начальные условия в Поиск оптимального по быстродей- RC-сетке 1, устанавливает счетчик 30; ствию управления объектом с распреде
2495494
и триггер 24 в единичное состояние, . также производит перезапись кода с выхода сметчика 27 в регистр 28. Пе-/ редким фронтом импульса решения и
5 с прямого выхода первого генератора импульсов производится установка триггера 7 в единичное состояние и через дифференцирующую цепочку 25 счетчик 27 сбрасывается в нуль. Под действием
to импульса с единичного выхода триггера 7 коммутатор 4 подключает выход блока 5 задания максимально допустимого входного возмущения к входу компаратора 3, а выход блока 5 задания эта15 лонного напряжения при этом отключается. На остальных входах компаратора 3 напряжения в начальный момент времени равны нулю. Таким образом, компаратор 3 переводит управляемый
20 стабилизатор 2 тока на полную мощность, определяя тем самым начало форсированного выхода объекта в режим. На второй и третий входы компа-. ратора 3 поступают сигналы отрицательскорости нарастания входного напряже- ния.
Таким образом, до того момента, пока входные и выходные координаты не достигнут своих предельных значений, объект движется к конечному сое тоянию с максимальной скоростью при предельном значении управляющего воздействия. Как только происходит превышение хотя бы одного из наложенных ограничений, то управляющее воздействие на выходе компаратора меняет :свой знак на обратный. Объект начинает двигаться с максимальной скоростью в обратную сторону и снова при переходе границы области допустимых значений его координат управляющее воздействие меняет свой знак. Таким образом организуют движение объекта на границе области допустимых значений
ленными параметрами на предлагаемом , устройстве заключается в пошаговом (от цикл-а к циклу решения) изм енении времени форсированного разгона с помощью блока 14 регулируемой задержки, j На первом цикле решения, когда определяется время переходного процесса без форсированного разгона, триггер 7 перебрасывается в нулевое состояние сразу же с приходом первого импульса 10 с второго генератора 11.
В каждом цикле решения счетчик 27 считает импульсы с второго генератора
ограничителей, выход управляемого стабилизатора тока соединен с первым входом компаратора, входом одного ограничителя и с первыми входами других ограничителей блока, вторые входы других ограничителей блока подключены к группе выходов RC-сетки, выходы ограничителей блока через, элемент ИЛИ соединены с вторым входом компаратора, третий вход которого подключен .к выходу коммутатора, выходы блока задания максимально допустимого входного воздействия и блока задания эталонного напряжения соединены соответственнб
1
20
11 до момента перевода триггера 24 в 5 с первым и вторым информационными нулевое состояние, а счетчик 30 - до входами коммутатора, первый и второй
управляющие входы которого подключены к прямому и инверсному выходам триггера соответственно, нулевой которого соединен с выходом цифрового блока регулируемой задержки, первый вход установки в исходное состояние цифрового блока ре.гулируемой задержки и управляющий вход RC-сетки соединень) с инверсным выходом первого генерато- ра импульсов, отличающееся тем, что, с целью повьппения точности
окончания импульса решения t , При окончании переходного процесса срабатывает триггер 24 и прекращает счет - импульсов с второго генератора 11 счетчиком 27. Этот импульс, поступая на компаратор 29, разрешает сравнение кодов регистра 28 и счетчика 27. Так как в начальный момент времени в ре- : гистре 28 записан максимально возмож- ный код, то на выходе цифрового ком- Ьаратора 29 появляется импульс, который увеличивает код счетчика 31 на единицу. В следующем цикле решения переход с форсированного режима наре- жим статирования задерживается на время, соответствующее периоду следования импульса (At) с второго генератора 11, Во всех последующих циклах это время увеличивается на At до тех пор, пока 35 при сравнении кодов регистра 28 и счетчика 27 последний не уменьшится. Если в каком-то цикле решения код счетчика 27 превысит код регистра 28,
моделирования, в него введены блок определения окончания переходного процесса, блок оптимизации и второй генератор импульсов, причем блок определения, окончания переходного процесса содержит первый и второй компараторы, первый и второй источники Эталонного напряжения, первый и вто- рой блоки определения модуля, дифференциатор, дифференциальный усилитель, элемент И, триггер, единичный вход которого соединен с выходом элемента.
то не появится импульс на выходе циф-40 И, первый и второй входы которого сорового компаратора 29 и во всех последующих циклах не произойдет изменение длительности форсированного разгона, т. е. определенное время форсированного разгона обеспечивает минималь- 45 ное время переходного процесса. Бремя форсированного разгона определяется
кодом N, записанным в счетчике 31, и, равно N it.
Формула изобретения
Устройство для моделирования оптимальной системы управления, содержащее RC-сетку, информационный вход ко-55 вым входом блока определения окончаторои соединен с выходом управляемого/ стабилизатора тока, вход которого со единен с выходом компаратора, блок
ограничителей, выход управляемого стабилизатора тока соединен с первым входом компаратора, входом одного ограничителя и с первыми входами других ограничителей блока, вторые входы других ограничителей блока подключены к группе выходов RC-сетки, выходы ограничителей блока через, элемент ИЛИ соединены с вторым входом компаратора, третий вход которого подключен .к выходу коммутатора, выходы блока задания максимально допустимого входного воздействия и блока задания эталонного напряжения соединены соответственнб
моделирования, в него введены блок определения окончания переходного процесса, блок оптимизации и второй генератор импульсов, причем блок определения, окончания переходного процесса содержит первый и второй компараторы, первый и второй источники Эталонного напряжения, первый и вто- рой блоки определения модуля, дифференциатор, дифференциальный усилитель элемент И, триггер, единичный вход которого соединен с выходом элемента.
единены с выходами первого и второго
к.омпараторов соответственно, первый, вход первого компаратора соединен
через первый определения модуля с выходом дифференциатора, второй вход первого компаратора подключен к выходу первого источника эталонного напряжения, первый вход второго компаратора через второй блок определения модуля соединен с выходом дифференциального усилителя, второй вход второго компаратора подключен к выходу второго источника эталонного напряжения, причем первый вход ренциального усилителя является перния переходного процесса и подключен к выходу блока задания эталонного на- пряжения устройства, второй вход дифференциального усилителя и вход дифференциатора являются вторым входом блока определения окончания переходного процесса и соединены с соответствующим выходом группы RC-сетки, единичный вход триггера является третьим входом блока определения окончания переходного процесса и подключен к инверсному выходу первого генератора импульсов, выход триггера является выходом блока определения окончания переходного процесса и соединен с первым входом блока оптимизации, включающего элемент И, дифференцирующую цепочку, счетчик, регистр, компаратор первый информационный вход которого соединен с информационным выходом регистра, информационный вход которого и второй информационный вход компаратора соединены с информационным выходом счетчика, счетный вход и вход установки нуля которого подключены к выходам элемента И и дифферен- ци ующей цепочки соответственно, причем первый вход элемента И .и стробиг рующий управляющий вход компаратора являются первым входом блока оптимиРедактор Л.Гратилло Заказ 4327/51
Техред В.Кадар
Корректор
Тираж 671 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,. Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
зации, вход дифференцирующей цепочки и второй вход элемента И являются вторым входом блока оптимизации и соединены с прямым выходом первого генератора импульсов, вход разрешения записи регистра, третий вход элемента И и вход записи максимального кода счетчика являются третьим, четвертым и пятым входами блока оптимизагши соответственно, выход которого является выходом компаратора и подключен к входу определения времения форсированного разгона цифрового блока регулируемой задержки, информационный вход
которого соединен с выходом второго генератора импульсов, выход которого подключен к четвертому входу блока оптимизации, инверсный выход первого генератора импульсов соединен с третьим входом блока оптимизации, прямой выход первого генератора импульсов подключен к единичному входу триггера устройства, установочный вход устройства соединен с пятым входом
блока оптимизации и с вторым входом установки в. исходное.состояние цифрового блока регулируемой задержки.
Техред В.Кадар
Корректор М.Демчик

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU970397A1 |
| Устройство для моделирования оптимальной системы управления | 1984 |
|
SU1254432A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU1023353A2 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1270779A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Термостатирующее устройство | 1981 |
|
SU1004995A1 |
| Система экстремального регулирования электронно-лучевым вентилем | 1980 |
|
SU938257A1 |
| Термостатирующее устройство | 1980 |
|
SU928318A2 |
| Термостатирующее устройство | 1980 |
|
SU940141A1 |
Изобретение относится к гибридной вычислительной технике. С целью повьшения точности моделирования оптимального управления объектом с распределенными параметрами в устройство введены блок 13 оптимизации, второй генератор 11 импульсов и блок 12 определения окончания переходного процесса, первь1й и второй входы которого- соединены с выходом блока 6 задания W Фиг.
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU1023353A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
