Изобретент1е относится к гибридной вычислительной технике, в частности к электрическим самонастраивающимся системам управления, и предназначено для автоматического решения задач оптимального по быстродействию управления объектами с распределенными параметрами при на- лк ши множества ограничений на фазовые координаты объекта.
Цель изобретения - повышение точности моделирования оптимального управления.
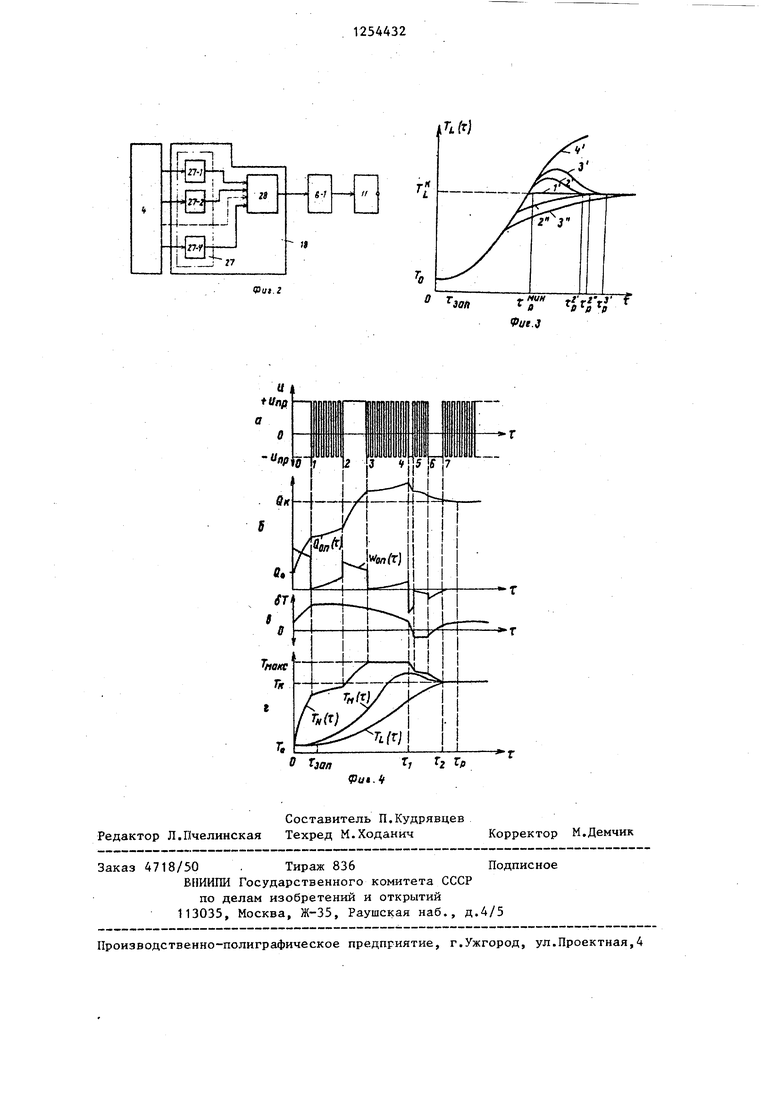
На фиг, 1 приведена функциональная схема устройства, автоматически осуществляющего поиск оптимального управления объектом с распределенными параметрами; на фиг. 2 - функциональная схема формирователя среднего значения температуры тела; на фиг. 3 - переходные процессы в L - точке (точка объекта с максимальным временем запаздывания) в процессе поиска оптимального управления; на фиг. 4 - графики переходных процессов при оптимальном управлении объектом с распределенными параметрами по граничным условиям второго рода.
Устройство содержит элемент ИЛИ 1, первый компаратор 2, управляемый стабилизатор 3 тока, RC -сетку 4, первый блок 5 дифференциальных усилителей, первый блок 6 компараторов, блок 7 задержки, триггер 8, генератор 9 импульсов, второй компаратор 10, первый элемент ИЛИ-НЕ 11, первый элемент И 12, второй блок 13 дифференциальных усилителей, второй блок 14 компараторов, второй элемент ИЛИ- НЕ 15, второй элемент И 16, третий компаратор 17 и формирователь 18 среднего значения температуры.
Блок 7 задержки образует четвертый компаратор 19, второй триггер 20 третий элемент И 21, счетчик 22 им- пульсов, цифроаналоговый преобразователь (ЦАП) 23, пятый компаратор 24, генератор 25 линейно изменяюще- г ося напряжения и блок 26 задания величины выходного перерегулирования
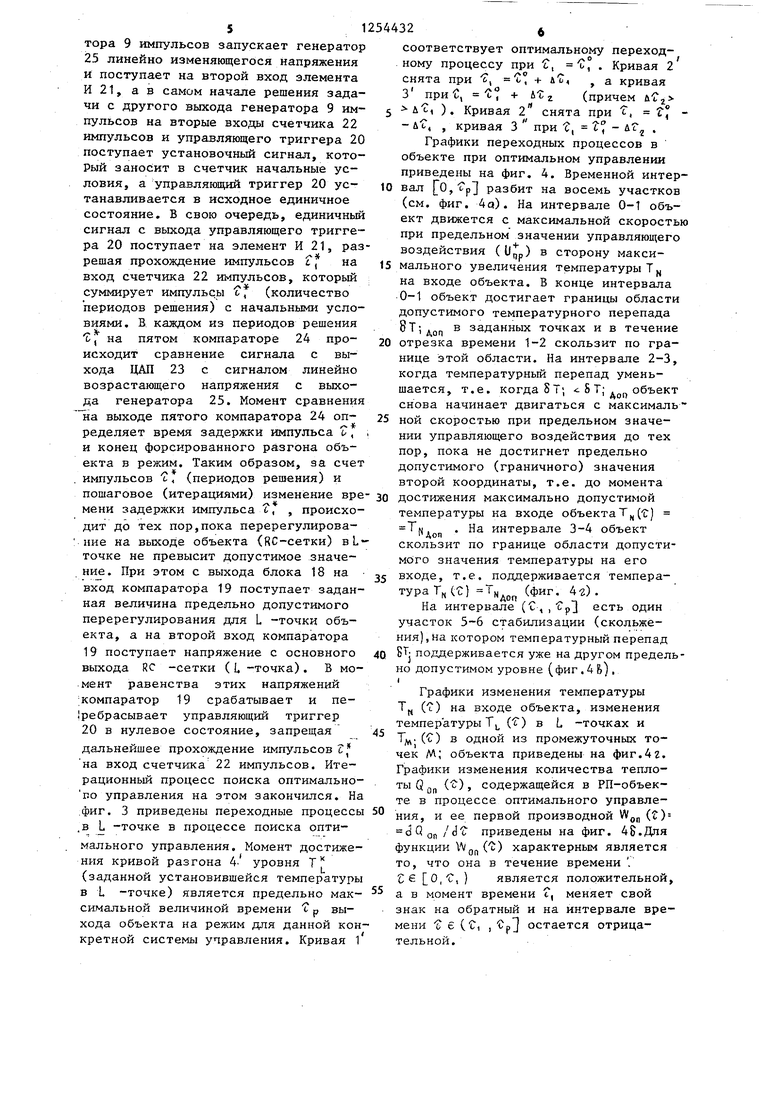
Формирователь 18 среднего значения температуры состоит из блока 27 аттенюаторов напряжения и сумматора 28 напряжения.
RC-сетка 4, являющаяся основным блоком устройства,содержит блок задания граничных и начальных условий а также узловые резисторы и емкости
и предназначена для интегрирования уравнений, описывающих динамику теплового поля в исследуемой области. В результате интегрирования исходных уравнений на ЙС -сетке образуются текущие значения некоторых компонент вектора состояний управляемого объекта с распределенными параметрами. Например, на RC -сетке определяется нестационарное тепловое состояние элементов конструкции в процессе выхода на режим термостата. Выходными наблюдаемыми координатами V объекта с распределенными параметрами являются температура Т в точке N (на входе объекта), температурные перепады в различных точках М; относительно точки N , T.e.T.-Tfj .
При решении задач оптимального управления температурными полями в твердых телах возникает необходимость учета ограничений на температурное расширение тела (детали) в определенном направлении. В предлагаемом устройстве учет такого ограничения осуществляется последовательным соединением блока 27 аттенюаторов напряжения, сумматора 28 напряжения и одного из компараторов блока 6 компараторов, на второй вход которого подается эталонное напряжение, соответствующее допустимому предельному значению средней температуры тела Т;,р . Блок 18 осуществля- ет формирование среднего значения температуры телаТ, (t). При этом сумматор 28 суммирует входные напряжения U; ( t)/n, поступающие с выходов аттенюаторов напряжения, так что напряжение U (-р (Z) на выходе сумматора 28 соответствует средней температуре Tj, () тела, т.е.
45
V b-Ucp(t):; rU;lt),
/де h - количество узлов RC -сетки 4, подключаемых к такому же количеству аттенюаторов блока 27.
На вторые входы блоков 6 и 14 компараторов подаются эталонные напряжения, соответствующие допустимьм предельным значениям температурных перепадов ST; (не показано). На второй вход второго компаратора 10 напряжения подается напряжение, соответствующее предельно допустимой температуре на входе РП-объекта, т.е.
соответствующее Т , а на второй вход третьего компаратора 17 подается напряжение,соответствующее заданной конечной температуре статирова- ния Т. Таким образом, на выходах компараторов в зависимости от значений наблюдаемьпк выходных координат Ч; объекта присутствуют О и 1, которые далее поступают на логические элементы ИЛИ-НЕ П и 15.
Пусть и,, и соответственно нижний и верхний уровни сигналов, соответствующие логическим сигналам О и 1, поступающим с выхода элемента ИЛИ 1. Тогда на второй вход компаратора 2 подается опорное напряжениеу (J
ииио„-и, ,т.е .
Поэтому в зависимости от того, в каком состоянии находится элемент ИЛИ 1, управляемый реверсивный стабилизатор 3 тока выдает ток той ипи иной поляр ;ости.
Генератор 9 импульсов на первом выходе формирует периодически повторяющуюся временную программу решения и подготовки к решению в виде импульсов , . Импульсами с, с выхода генератора 9 триггер 8 и блок 7 задержки устанавливаются в исходное состояние.
Устройство работает следующим образом.
го предельного значения Y
Посл
10
1 Доп
ЭТОГО входное воздействие уменьшает ся и регулируется (релейно) так, чтобы выходная координата не превыш ла допустимого значения, то есть скользила по границе области допустимых значений координат объекта,. И так продолжается до определенного фиксированного момента времени ь, бС, Темп подвода энергии к объекту в этот промежуток времени превьшает темп распространения тепла (выравнивания) по объекту, поэто му теплота Б основном сконцентриров 15 на на входе объекта. Этот промежуто времени назван временем форсированного разгона объекта в режим. К кон цу этого промежутка времени объект обладает энергией, большей той, которая соответствует его заданному конечному состоянию.
В момент времени f, задержанный импульс Сброс с выхода блока 7 задержки перебрасывает триггер 8 в другое состояние. В свою очередь,- триггер 8 запрещает прохождение импульсов с выхода первого элемента ИЛИ-НЕ 11 на вход элемента ИЛИ 1, прохождение импульсов с выхода второго элемента ИЛИ-НЕ 15 при этом разрешено.
Таким образом, в момент времени Г, подается предельное управляющее
го
25
30
воздействие и„. до тех пор, пока Генератор 9 импульсов,вырабатывая 35 хотя бы одна из выходных координат
импульс времени решения о дит в сетке 4 подключение блоков задания граничных и начальных условий, которые задают в ее узлы начальные и граничные условия, известные из исходных данных задачи. Кроме того, с выхода генератора 9
произво- объекта не достигнет предельного
значения. Далее.идет скольжение по, границе области допустимых значений координат объекта. Как только по- 40 следняя координата объекта переместится с границы области 51ц допустимых значений внутрь этой области, на объект снова подается предельное управляющее воздействие Unp И так
импульс
поступает в блок 7 и своим передним, фронтом переводит триггер 8 в исходное состояние. В свою очередь, триг- 45 продолжается до тех пор, пока темпе- гер 8 разрешает прохождение импуль- ратура Т, на входе объекта (в N - сов с выхода первого элемента ИДИ-НЕ 11 на вход элемента ИЛИ 1, прохожде- ,ние импульсов с выхода второго эле50
..мента ИЛИ-НЕ 15 при этом запрещено.
Устройство в переходном режиме работает следующим образом.
При оптимальном быстродействии на вход объекта с начального момента
точках) не достигнет заданного конечного значения. Этот промежуток времени назван временем форсированного торможения объекта.
Поиск оптимального управления объектом с распределенными параметрами на предлагаемом устройстве заключается в шаговом изменении време времени подается максимальное управ- 55 ни задержки импульса С, с помощью ляющиее воздействие , до тех пор, управляемого блока 7 задержки. В пока хотя бы одна из выходньк коор- начальный момент каждого периода динат Y; объекта не достигнет свое- решения импульс 2 с выхода генера2544324
го предельного значения Y
После
10
1 Доп
ЭТОГО входное воздействие уменьшается и регулируется (релейно) так, чтобы выходная координата не превышала допустимого значения, то есть скользила по границе области допустимых значений координат объекта,. И так продолжается до определенного фиксированного момента времени ь, бС, Темп подвода энергии к объекту в этот промежуток времени превьшает темп распространения тепла (выравнивания) по объекту, поэтому теплота Б основном сконцентрирова- 15 на на входе объекта. Этот промежуток времени назван временем форсированного разгона объекта в режим. К концу этого промежутка времени объект обладает энергией, большей той, которая соответствует его заданному конечному состоянию.
В момент времени f, задержанный импульс Сброс с выхода блока 7 задержки перебрасывает триггер 8 в другое состояние. В свою очередь,- триггер 8 запрещает прохождение импульсов с выхода первого элемента ИЛИ-НЕ 11 на вход элемента ИЛИ 1, прохождение импульсов с выхода второго элемента ИЛИ-НЕ 15 при этом разрешено.
Таким образом, в момент времени Г, подается предельное управляющее
го
25
30
продолжается до тех пор, пока темпе- ратура Т, на входе объекта (в N -
точках) не достигнет заданного конечного значения. Этот промежуток времени назван временем форсированного торможения объекта.
Поиск оптимального управления объектом с распределенными параметрами на предлагаемом устройстве за5
тора 9 импульсов запускает генератор 25 линейно изменяющегося напряжения и поступает на второй вход элемента И 21, а в самом начале решения задачи с другого выхода генератора 9 импульсов на вторые входы счетчика 22 импульсов и управляющего триггера 20 поступает установочный сигнал, КОТОРЫЙ заносит в счетчик начальные условия, а управляющий триггер 20 устанавливается в исходное единичное состояние, В свою очередь, единичный сигнал с выхода управляющего триггера 20 поступает на элемент И 21, раз
решая прохождение импульсов с
i
на
вход счетчика 22 импульсов, который суммирует импульсы Tf (количество периодов решения) с начальными условиями. В каждом из периодов решения С J на пятом компараторе 24 происходит сравнение сигнала с выхода ЦАП 23 с сигналом линейно возрастающего напряжения с выхода генератора 25. Момент сравнения на выходе пятого компаратора 24 определяет время задержки импульса , и конец форсированного разгона объекта в режим. Таким образом, за счет импульсов t, (периодов решения) и
15 мального увеличения температуры Т на входе объекта. В конце интерва 0-1 объект достигает границы обла допустимого температурного перепад 8Т;,д в заданных точках и в течен отрезка времени 1-2 скользит по г нице этой области. На интервале 2 когда температурный перепад умень шается, т.е. когда 5Т; 8 Т объ снова начинает двигаться с максим ной скоростью при предельном знач нии управляющего воздействия до т пор, пока не достигнет предельно допустимого (граничного) значения второй координаты, т.е. до момент
пошаговое (итерациями) изменение вре- зо достижения максимально допустимой мени задержки импульса , , происхотемпературы на входе объекта Т ( С) Tfj . На интервале 3-4 объект скользит по границе области допус мого значения температуры на его 35 входе, т.е. поддерживается темпер тура ) ндоп )дит до тех пор,пока перерегулирова- ние на выходе объекта (RC-сетки) вЬ- точке не превысит допустимое значение. При этом с выхода блока 18 на вход компаратора 19 поступает заданная величина предельно допустимого перерегулирования для L -точки объекта, а на второй вход компаратора
19 поступает напряжение с основного 4D поддерживается уже на другом предель- выхода RC -сетки (I, -точка). В момент равенства этих напряжений 19 срабатывает и
пе; компаратор ребрасывает управляющий триггер 20 в нулевое состояние, запрещая
дальнейшее прохождение импульсов на вход счетчика 22 импульсов. Итерационный процесс поиска оптимально- г.о управления на этом закончился. На
но допустимом уровне (фиг .46),
Графики изменения температуры
Tj () на входе объекта, изменения . температуры Tj ( Г) в L -точках и (С) в одной из промежуточных точек М; объекта приведены на фиг.4г. Графики изменения количества теплоты Q д„ ( 2 ), содержащейся в РП-объек- те в процессе оптимального управлеTj () на входе объекта, изменения . температуры Tj ( Г) в L -точках и (С) в одной из промежуточных точек М; объекта приведены на фиг.4г. Графики изменения количества теплоты Q д„ ( 2 ), содержащейся в РП-объек- те в процессе оптимального управлефиг. 3 приведены переходные процессы 50 - gg первой производной (г) .в L -точке в процессе поиска опти dQon /d c приведены на фиг. 48.Для функции onCZ) характерным является то, что она в течение времени . ее О, Т,) является положительной, а в момент времени с, меняет свой знак на обратный и на интервале времени t е (С, , СрЗ остается отрицательной.
мального управления. Момент достижения кривой разгона 4. уровня Т (заданной установившейся температуры в L -точке) является предельно мак- симальной величиной времени t р выхода объекта на режим для данной конкретной системы управления. Кривая 1
соответствует оптимальному переходному процессу при г
снята при ь,
3 при€, 1 + А-С.
-г + A j,
5 А-г:, ). Кривая 2
Кривая 2 а кривая (причем д Г,
о
1
снята при t, при с, t° - дГ
ххО
t;
-At, , кривая 3
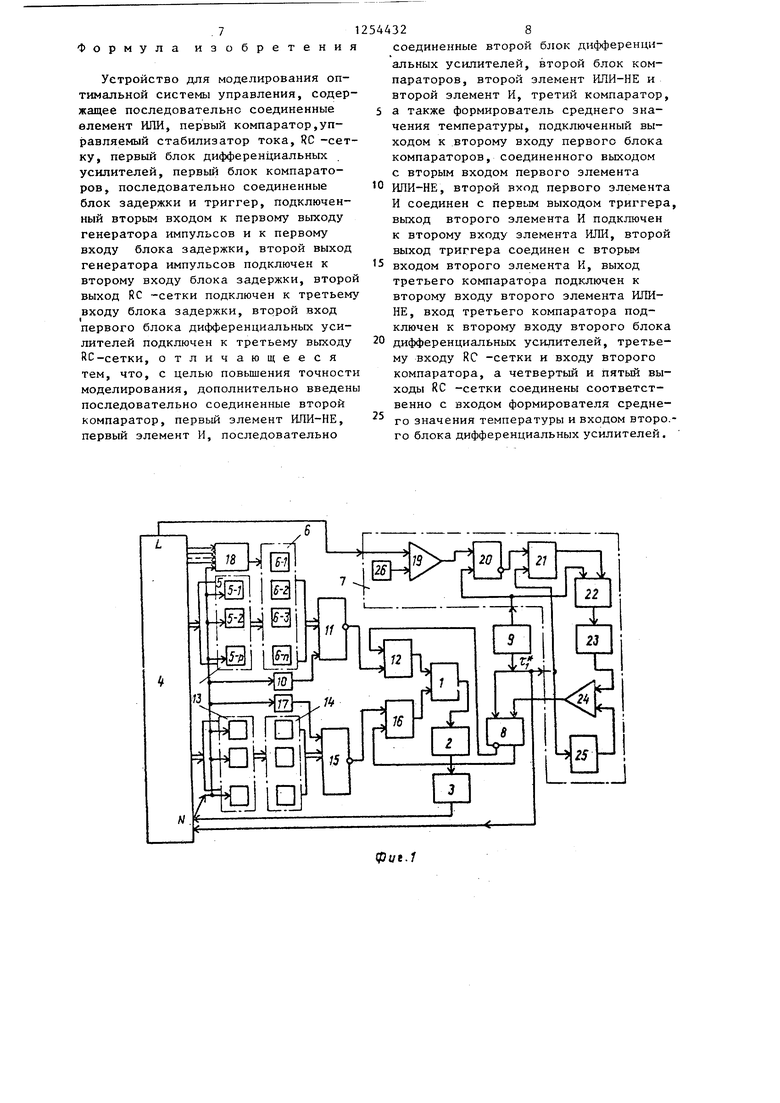
Графики переходных процессов в объекте при оптимальном управлении приведены на фиг. 4. Временной интер0 вал fOj Tp разбит на восемь участков (см. фиг. 4а). На интервале 0-1 объект движется с максимальной скоростью при предельном значении управляющего воздействия (UiJ p) в сторону макси5 мального увеличения температуры Т на входе объекта. В конце интервала 0-1 объект достигает границы области допустимого температурного перепада 8Т;,д в заданных точках и в течение отрезка времени 1-2 скользит по границе этой области. На интервале 2-3, когда температурный перепад уменьшается, т.е. когда 5Т; 8 Т объект снова начинает двигаться с максималь ной скоростью при предельном значении управляющего воздействия до тех пор, пока не достигнет предельно допустимого (граничного) значения второй координаты, т.е. до момента
0
5
достижения максимально допустимой
достижения максимально допустимой
температуры на входе объекта Т ( С) Tfj . На интервале 3-4 объект скользит по границе области допустимого значения температуры на его входе, т.е. поддерживается температура ) ндоп )На интервале (С, , ТрЗ есть один участок 5-6 стабилизации (скольжения), на котором температурный перепад
поддерживается уже на другом пред
но допустимом уровне (фиг .46),
Графики изменения температуры
поддерживается уже на другом предель
Tj () на входе объекта, изменения температуры Tj ( Г) в L -точках и (С) в одной из промежуточных точек М; объекта приведены на фиг.4г. Графики изменения количества теплоты Q д„ ( 2 ), содержащейся в РП-объек- те в процессе оптимального управле- gg первой производной (г)
dQon /d c приведены на фиг. 48.Для функции onCZ) характерным является то, что она в течение времени . ее О, Т,) является положительной, а в момент времени с, меняет свой знак на обратный и на интервале времени t е (С, , СрЗ остается отрицательной.
Формула изобретения
Устройство для моделирования оптимальной системы управления, содержащее последовательно соединенные елемент ИЛИ, первый компаратор,управляемый стабилизатор тока, RC -сетку, первый блок дифференциальных усилителей, первый блок компараторов, последовательно соединенные блок задержки и триггер, подключенный вторым входом к первому выходу генератора импульсов и к первому входу блока задержки, второй выход генератора импульсов подключен к второму входу блока задержки, второй выход RC -сетки подключен к третьему ВХОДУ блока задержки, второй вход первого блока дифференциальных усилителей подключен к третьему выходу RC-сетки, отличающееся тем, что, с целью повьшения точности моделирования, дополнительно введены последовательно соединенные второй компаратор, первый элемент ИЛИ-НЕ, первый элемент И, последовательно
соединенные второй блок дифференциальных усилителей, второй блок компараторов, второй элемент ИЛИ-НЕ и второй элемент И, третий компаратор, 5 а также формирователь среднего значения температуры, подключенный выходом к второму входу первого блока компараторов, соединенного выходом с вторым входом первого элемента
Ш1И-НЕ, второй вход первого элемента И соединен с первым выходом триггера, выход второго элемента И подключен к второму входу элемента ИЛИ, второй выход триггера соединен с вторым
5 входом второго элемента И, выход третьего компаратора подключен к второму входу второго элемента ИЛИ- НЕ, вход третьего компаратора подключен к второму входу второго блока
0 дифференциальных усилителей, третьему входу RC -сетки и входу второго компаратора, а четвертый и пятый выходы RC -сетки соединены соответственно с входом формирователя среднего значения температуры и входом второ.- го блока дифференциальных усилителей.
5
Фие.
Ри.г
г;.
0
о т
зон
«V f
Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1249549A1 |
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU970397A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU1023353A2 |
| Термостатирующее устройство | 1983 |
|
SU1193647A1 |
| Термостатирующее устройство | 1980 |
|
SU940141A1 |
| Термостатирующее устройство | 1980 |
|
SU928318A2 |
| Термостатирующее устройство | 1980 |
|
SU943666A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1288729A1 |
Изобретение относится к области автоматики и предназначено для авто- матическо.го решения задач оптимального по быстродействию управления объектами с распределенными параметрами при наличии ограничений на фазовые координаты. Цель изобретения - повышение точности моделирования. Сущность изобретения заключается в том, что в устройство дополнительно введен формирователь среднего значения температуры, что позволяет в период форсированного нагревания объекта до средней предельно допустимой температуры ограничивать ее на этом уровне. Введение в устройство еще одного блока дифференциальных усилителей позволяет осуществлять ограничение последних на заданном предельно допустимом уровне и в период форсированного охлаждения (торможения) . объекта. 4 ил. сл 4 ОО N3
Составитель П.Кудрявцев Редактор Л.Пчелинская Техред М.Ходанич Корректор М.Демчик
Заказ 4718/50 . Тираж 836Подписное
ВПИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU970397A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
