(5) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОПТИМАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU970397A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU1023353A2 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1249549A1 |
| Устройство для моделирования оптимальной системы управления | 1984 |
|
SU1254432A1 |
| Термостатирующее устройство | 1980 |
|
SU940141A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Термостатирующее устройство | 1983 |
|
SU1193647A1 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1288729A1 |
| Устройство для моделирования оптимальной системы управления | 1984 |
|
SU1233188A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
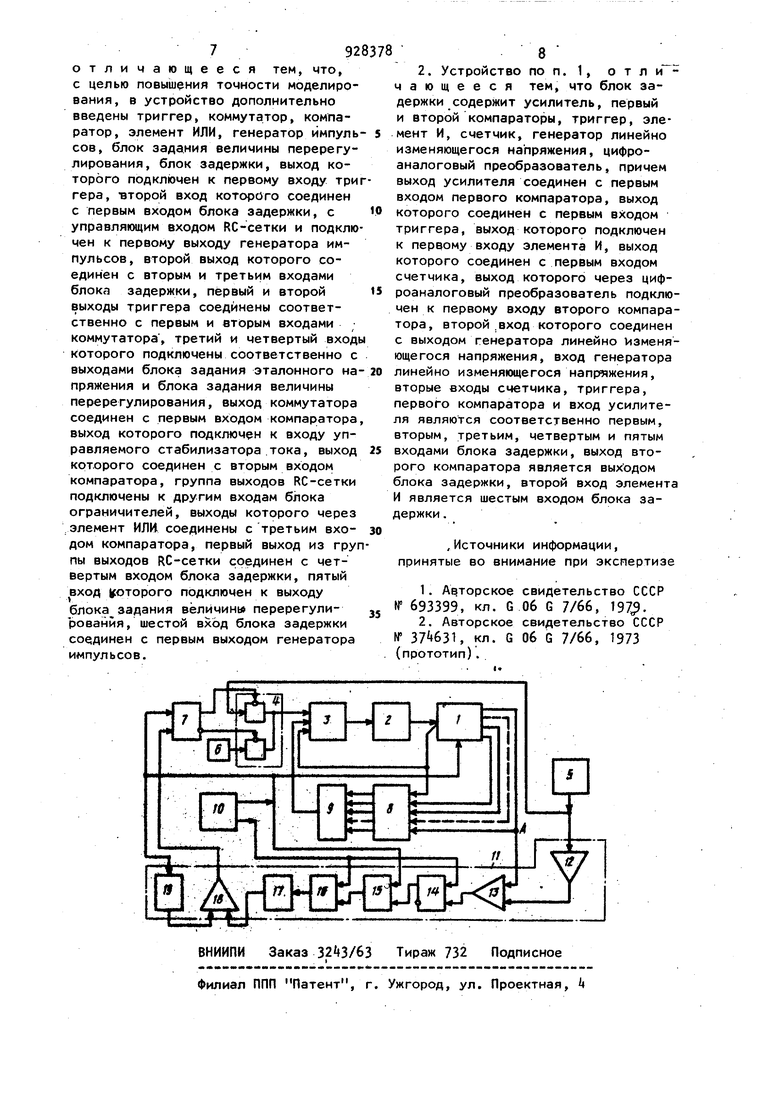
Изобретение относится к гибридной вычислительной технике и предназначено для автоматического решения задач оптимального по быстродействию управления системами с распределенными параметрами при наличии множества ограничений на входные и выходные координаты. Известно устройство для моделирования замкнутых респределенных систем управления, содержащее источники эталонного напряжения, блоки сравнения, блок моделирования регулятора температуры, элемент ИЛИ, ключи, RC-еетку .напряжения, триггер lj. Недостатком этого устройства является низкая точность моделирования оптимального управления. Наиболее близким по технической сущности к предлагаемому является устройство для моделирования оптималь ного управления, содержащее блок формирования эталонного напряжения, блоки ограничителей, управляемый .стабилизатор тока, RC-сетку, усилитель постоянного тока . Недостатком этого устройства является низкая точность моделирования. Цель изобретения - повышение том- ности моделирования оптимального управления. Поставленная цель достигается тем, что в устройство для моделирования оптимального управления, содержащее блок задания эталонного напряжения, управляемый стабилизатор тока, выход которого соединен с информационным входом RC-сетки и с первым входом блока ограничителей, дополнительно введены триггер, коммутатор, компаратор, элемент ИЛИ, генератор импульсов, блок задания величины перерегулирования , блок задержки, выход которого подключен к первому входу триггера , второй вход которого соединен с первым входом блока задержки, с управляющим входом RC-сетки и подключен к первому выходу генератора импульсов, второй выход которого соеди нен с вторым и третьим входами блока задержки, первый ивторой выходы три гера соединены соответственно с первым и вторым входами коммутатора, тр тий и четвертый входы которого подключены соответственно к выходам бло ка задания эталонного напряжения и блока задания величины перерегулирования, выход коммутатора соединен с первым входом компаратора, выход которого подключен к входу управляемог стабилизатора тока, выход которого с единен с вторым входом компаратора, третий вход которого через элемент ИЛИ подключен к выходам блока ограни чителей , группа входов которого соединена с входом RC-сетКи, первый выход которой соединен с четвертым входом блока задержки, пятый вход которого подключен к выходу блока задания величины перерегулирования. Кроме того, блок задержки содержит усилитель, первый и второй компараторы, триггер, элемент И, счетчик, генератор линейно изменяющегося напряжения, цифроаналоговый преобразователь, причем выход усилителя соеди нен с первым входом первого компаратора, выход, которого соединен с первым входом триггера, выход которого подключен к первому входу элемента И, выход которого соединен с первым входом счетчика, выход которого чере цифроаналоговыйпреобразователь подключен к первому входу второго компа ратора, второй вход которого соединен с выходом генератора линейно-изменяющегося напряжения, вход генератора линейно-изменяющегося напряжени вторые входы cчetчикa, триггера, пер вого компаратора и вДод усилителя яв ляются соответственно первым, вторым третьим, четвертым и пятым входами блока задержки, выход второго компаратора является выходом блока задерж ки, второй вход элемента И является шестым входом блока задержки. На чертеже представлено устройстУстройство содержит RC-сетку 1 вместе с блоками задания граничных и начальных условий управляемый ста билизатор 2 тока, компаратор 3, коммутатор k напряжений j блок 5 задания эталонного напряжения, блок 6 величины перерегулирования, формирующий триггер 7, блок 8 ограничителей элемент ИЛИ 9, генератор 10 импульсов , блок 11 задержки. Блок 11 задержки содержит усилитель 12, первый компаратор 13, управляющий триггер 1, элемент И 15, счетчик 16 импульсов, цифроаналоговый преобразователь 17j второй компаратор 18, генератор 19 линейно изменяющегося напряжения, Устройство работает следующим образом. Генератор 10 импульсов, вырабатывая импульс времени решения С(, производит в RC-сетке 1 подключение блоков задания граничных и начальных условий, которые задают в ее узлы начальное и граничное условия, известные из исходных данных задачи. Кроме того, импульс f с выхода генератора 10 импульсов поступает в управляемый блок 11 задержки, а своим передним фронтом переводит формирующий триггер 7 в единичное состояние.. После этого коммутатор под действием управления с формирующего триггера 7 подключает, выход блока 6 задания величины перерегулирования ко входу компаратора 3, а выход блока 5 задания эталонного напряжения при этом отключает. На остальных входах компаратора 3 напряжение в начальный момент равно нулю. Таким образом, компаратор 3 перевоит управляемый стабилизатор 2 тока на полную мощность, определяя тем самым начало форсированного выхода объекта в режим. Решение задачи начинается в момент подачи на вход компаратора 3 с блока 6 задания величины входного перерегулирования скачка напряжения заданной амплитуды, которое соответствует максимально допустимому напряжению на входе объекта. На второй и третий входы компаратора 3 поступают сигналы отрицательной обратной связи с выхода и входа RC-сетки 1. При этом компаратор 3 перебрасывается в другое состояние, как только напряжение на входе объекта достигнет своего предельного значения, равного амплитуде сформированного скачка напряжения, а также компаратор срабатывает, если сработает хотя бы один, из ограничителей блока 8. Последний,срабатывает, как только градиент любой выходной точки объекта относительно входной превысит допустимую величину. Таким образом, до того,момента, пока входные и выходные координаты объекта не достигнут своих предельных значений, объект движется к конечноиу состоянию с максимальной скоростью при предельном значении управляющего воздействия. Как только хотя бы одна из координат объекта достигнет своего предельного значения, то управляющее воздействие ни выходе компаратора 3 меняет свой знак на обратный. Объект начинает двигаться в обратную сторону, и снова при переходе границы области допустимых значений его координат управляющее воздействие меняет свой знак. Таким образом,, организуют движения объекта по границе области допустимых значений его.входных и выходных координат до окончания переходного пррцесса. В процессе решения этой задачи регулятор и моделируемый объект управления представляет собой замкнутую систему, удерживающую входные и выход ные координаты объекта на допустимых значениях. Теперь, по истечении определенного времени с начала переходного процесса, задержанный импульс T с выхода блока 11 задержки своим передним фронтом устанавливает формирующий.триггер 7 в нулевое состояние, который, в свою очередь, производит переключение каналов коммутатора k. При этом выход блока 6 задания величины перерегулирования отключается от входа компаратор 3, а выход блока 5 задания эталонного напряжения подключается. Таким образом, момент ерабатывания Фоомиоующего триггера 7 Свидетельствует об окончании форсированного раз-гона управляемого объекта в режим и начало режима стабилизации его на конечном уровне. Начиная с этого момента компаратор 3 отрабатывает ошибку рассогласования, компенсируя запасенную энергию объекту регулирования. . Поиск оптимального управления объектами с распределенными параметрами на предлагаемом устройстве заключается в пошаговом изменении времени задержки импульса С1( с помощью управляемого блока 11 задержки. В начальный момент каждого периода решения импульс -tTx) с выхода генератора 10 импульсов запускает генератор 19 линеино изменяющегося напряжения и -поступает на второй вход элемента И15, а в самом начале решения задачи с другого выхода генератора 10 импульсов на вторые входы счетчика 16 импульсов и управляющего триггера k поступает установочный сигнал, кототорый заносит в счетчик начальные условия, а управляющий триггер 1 устанавливают в исходное единичное состояние . В свою очередь, единичный сигнал с выхода управляющего триггера k поступает на элемент И15, разрешая прохождение импульсов tr на вход счетчика 16 импульсов, который суммирует импульсы t (количество периодов решения) с начальйыми условиями . В каждом из периодов решения f на втором компараторе 18 происходит сравнение сигнала с выхода цифроаналогового преобразователя 17с сигналом линейно возрастающего напряжения с выхода генератора 19. .Момент сравнения на выходе второго компаратора 18 определяет время задержки импульса и конец форсированного разгона объекта в режим. Таким образом, счет импульсов tr (периодов решения) и пошаговое (итерациями) изменение времени задержки мпульса f происходит до тех пор, пока перерегулиррвание на выходе объекта (RC-сетки превысит допустимое. При этом с выхода усилителя 12 на вход первого компаратора 13 поступает заданное допустимое перерегулирование для заданной точки объекта (RC-сетки), а н второй вход компаратора 13 поступает напряжение с основного выхода RC-сетки (точка А). В момент равенства этих напряжений первый компаратор 13 сработает и перебросит управляющий триггер 1Д в нулевое состояние, запрещая тем самым дальнейшее прохождение импульсов Х на вход счетчика 16 импулъсов. Процесс поиска оптимального управления на этом закончился. Предлагаемое устройство, благодаря наличию новых элементов и связей между ними, позволяет повысить томность моделирования оптимального управления. Формула изобретения 1. Устройство для моделирования оптимальной системы управления, содержащее блок задания эталонного напряжения, управляемый стабилизатор тока, выход которого соединен с информационным входом RC-сетки и с одним входом блока ограничителей,
