Изобретение относится к машине-- строению.
Цель изобретения - повышение надежности работы устройства.
На чертеже изображено предлагаемое устройство.
Устройство управления динамической системой содержит установленные на основании 1 объект 2 управления и платформу 3 с гироскопами 4,5 и 6 и датчиками 7,8 и 9 положения платформы,
Объект 2 управления и платформа 3 установлены шарнирно на своих осях 10 и 11, жестко связанных с основа- кием 1, датчики 7,8 и 9 положения платформы размещены меадУ тремя точками 12 (А,В и С) платформы 3, расположенными не на одной прямой, и тремя точками 13 (А, В и С ) ос- нования 1, расположенными не на одной прямой. Объект 2 управления связан с основанием 1 с помощью трех приводов 14, 15 и 16, шарнирно связанных с объектом 2 управления и ос- нованием 1, а по управляющим входам (не показаны) - с датчиками 7,8 и 9 положения платформы.
Приводы 14, 15 и 16 связаны с объектом 2 управления в трех точках 17, расположенных не на одной прямой а с основанием 1 в трех точках 18, также расположенных не на одной прямой. Объект 2 управления и платформа 3 связаны с осями 10 и 11 с помощью шарниров 19 и 20.
Устройство управления динамическо системой работает следующим образом При изменении положения основания 1 в пространстве ппатформа 3 с гиро- скопами 4, 5 и 6 сохраняет свое первоначальное положение в пространстве которое фиксируется тремя датчиками 7,8 и 9 положения платформы. Сигналы с датчиков 7, В и 9 передаются на приводы 14, 15 и 16, которые обеспечивают положение объекта 2 управ
Редактор Е. Копча
Составитель В. Муханов
Техред Н.Бонкало КорректорМ. Иаксимишинец
Заказ 4409/43 Тираж 836 Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
0 5
О
0
5
ления в пространстве такое же, как положение платформы 3.
Таким образом, объект управления синхронно с платформой 3 сохраняет первоначальное положение в пространстве.
Это обеспечивается благодаря креплению датчиков 7, 8 и 9 положения платформы в трех точках основания 1 и платформы 3, расположенных не на одной прямой, а также аналогичному креплению приводов 14, 15 и 16 меяаду объектом 2 управления и основанием 1, так как три точки, расположенные не на одной прямой, определяют положение плоскости в пространстве.
Предлагаемое выполнение устройства позволяет разместить объект 2 управления и платформу 3 с гироскопами на разных осях, что снижает нагрузку в шарнирных соединениях осей и, следовательно, повьшает надежность устройства.
Формула изобретения
Устройство управления динамической системой, содержащее установленные на основании объект управления и платформу с гироскопами и датчиками положения платформы, о т- личающееся тем, что, с целью повьшения надежности, объект управления и платформа установлены шарнирно на своих осях, жестко связанных с основанием, датчики положения платформы размещены между тремя точками платформы, расположенными не на одной прямой, и тремя точками основания, расположенными не на одной прямой, объект управления связан с основанием с помощью трех приводов, шарнирно связанных с объектом управления и основанием, а по управляющим входам - с датчиками положения платформы.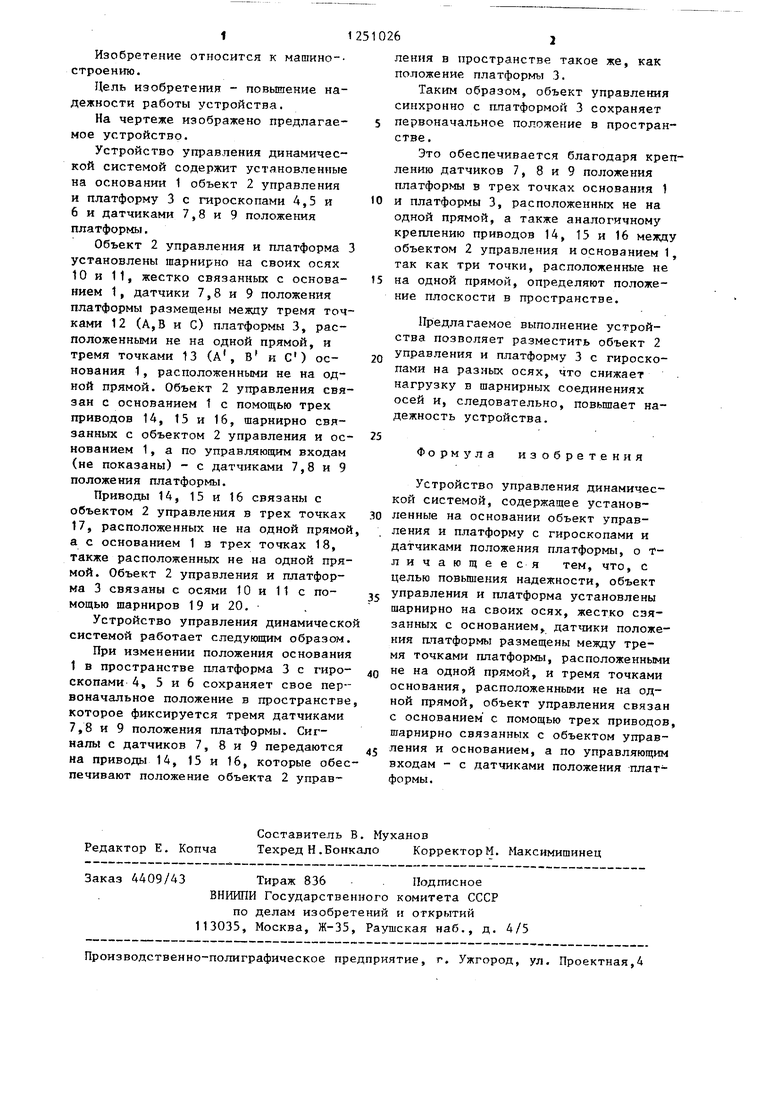
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКОЙ СИСТЕМОЙ | 1992 |
|
RU2073904C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| ГИРОСКОПИЧЕСКАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 1996 |
|
RU2109137C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2343418C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2323136C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
Изобретение относится к области гироскопических устройств стабилизации и позволяет повысить надежность работы путем размещения объекта управления и платформы с гироскопами на различных осях,что снижает нагрузку в шарнирных соединениях осей. Для этого объект управления (ОУ) 2 и платформа 3 установлены шармирно на своих осях 10 и 11, жестко связанных с основанием 1, датчики положения платформы (ДПФ) 7, 8 и 9 размещены между тремя точками 12 платформы 3 и тремя точками 13 основания 1, расположенньми не на одной прямой. ОУ 2 связан с основанием 1 с помощью приводов 14, 15 и 16, шар- нирно связанных с ОУ 2 и основанием 1, а по управляющим входам - с ДПФ 7, 8 и 9. Приводы 14, 15 и 16 связаны с ОУ 2 и с основанием 1 с кахдым в трех точках 17 и 18 и в трёх точках 18, расположенных не на одной прямой. При изменении положения основания 1 в пространстве платформа 3с гироскопами сохраняет свое положение в пространстве за счет работы гироскопов, которое фиксируется ДПФ 7, 8 и 9. Сигналы с ДПФ 7, 8 и 9 передаются на приводы 14, 15 и 16, которые обес печивают положение основания 1 в пространстве такое же, как положение платформы 3. 1 ил. (Л vyT/TTT/y
| Пельпор Д.С | |||
| Гироскопические системы | |||
| М., Высшая школа, 1977, ч | |||
| I, с | |||
| Насос | 1917 |
|
SU13A1 |
| Пельпор Д.С | |||
| Гироскопические системы | |||
| М., Высшая школа, 1977, ч | |||
| II, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
