Изобретение относится к устройствам измерения геометрических характеристик оси буровой скважины, в частности, к гироскопическим инклинометрам, способным работать в непрерывном и точечном режимах измерения траекторных параметров скважин как обсаженных, так и необсаженных без использования магнитного поля Земли.
К числу измеряемых геометрических характеристик оси буровой скважины относятся параметры траектории скважины: зенитный угол и азимут плоскости наклона оси в каждой точке скважины.
Известны инклинометры, в которых азимут определяется с помощью приборов, построенных на основе позиционных гироскопических датчиков, которые основаны на свойстве трехстепенного гироскопа сохранять положение главной оси неизменным в пространстве. Гироскопы размещаются в скважинном приборе и их внешняя ось направлена по оси скважинного прибора. После разгона ротора гироскоп занимает определенное (опорное) положение относительно плоскости меридиана, которое на поверхности Земли требуется точно зафиксировать (В.Х. Исаченко Инклинометрия скважин, М.: Недра, 1982, с. 78-82).
В условиях эксплуатации процесс выставки достаточно сложный и требует времени.
Кроме того, указанные инклинометры имеют ограничения по диапазону зенитного угла, а их погрешность в измерении азимута зависит от величины зенитного угла с его увеличением растет. В связи с малой величиной кинетического момента гироскопа, его уход в статических условиях также растет с увеличением зенитного угла.
Указанные недостатки, особенно связанные с вставкой, отсутствуют в гироскопическом инклинометре, который выбран в качестве прототипа и который содержит скважинный прибор и связанный с ним посредством каротажного кабеля наземный вычислитель. В скважинном приборе расположены двухкомпонентный гироскопический датчик угловой скорости (на основе динамически настроенного гироскопа) и два акселерометра, оси чувствительности которых параллельны между собой и перпендикулярны оси скважинного прибора. Вставка производится автономно при неподвижном относительно Земли скважинном приборе.
Информация о зенитном угле и повороте скважинного прибора вокруг продольной оси поступает с акселерометров вычислительный блок, который определяет зенитный угол и азимут плоскости наклонения оси скважины (см. патент РФ 2004786, кл. E 21 B 47/02, опубл. 1995).
Этот инклинометр обладает всеми известными погрешностями и кроме того он достаточно дорог за счет наличия вычислительного блока. Он требует предварительной выставки трехстепенного гироскопа на поверхности Земли, а погрешность измерения азимута будет зависеть от величины зенитного угла. Курсовой уход гироскопа во времени вводит существенную ошибку на определение азимута.
Целью изобретения является измерение траекторных параметров скважины: зенитного угла и азимута в широком диапазоне с большой точностью и простыми средствами.
Поставленная цель достигается тем, что в гироскопическую систему контроля нефтяных и газовых скважин, содержащую наземную аппаратуру и связанный с ней каротажным кабелем скважинный прибор, содержащий два акселерометра и гироскопический датчик угловой скорости, ось чувствительности которого параллельны оси чувствительности одного из акселерометров и перпендикулярна продольной оси скважины, наружную раму с датчиками момента и угла поворота наружной рамы, установленную на оси параллельной скважине, введены датчик зенитного угла, дополнительный датчик момента, кинематический узел, выполненный из трех шестерен, и тремя параллельными между собой внутренними рамами, шарнирно закрепленными на наружной раме, при этом на первой внутренней раме установлен гироскопический датчик угловой скорости, корпус которого выполнен шарообразным и на котором установлена первая шестерня кинематического узла, на второй внутренней раме установлены дополнительный датчик момента, вторая шестерня кинематического узла и датчик зенитного угла, на третьей внутренней раме установлены первый акселерометр, ось чувствительности которого перпендикулярна оси чувствительности второго акселерометра, установленного на нижней части наружной рамы, при этом на третьей внутренней раме установлена третья шестерня кинематического узла с возможностью взаимодействия с первой шестерней через вторую, причем выходы 1-го акселерометра и датчика зенитного угла электрически подключены с возможностью их чередования ко входам дополнительного датчика момента, а выходы второго акселерометра и датчика угла поворота наружной рамы электрически соединены с возможностью их чередования со входом другого датчика момента.
Сущность изобретения поясняется чертежом, на котором изображена структурная схема гироскопической телеметрической системы контроля нефтяных и газовых скважин.
Система содержит наружную раму 1, установленную на оси 2, которая расположена вдоль оси скважины и на которой установлены датчик 3 угла поворота наружной рамы (СКТ) и датчик момента 4, который устанавливает раму 1 в апсидальной плоскости, гироскопический датчик угловой скорости 5, выполнен двухстепенным и установлен в шарообразном корпусе 6 с первой шестерней 7 кинематического узла на шарнирно закрепленной раме 8, расположенной вдоль вектора кинематического момента и перпендикулярно оси наружной рамы 1, дополнительный датчик момента 9 установлен на второй шарнирно закрепленной внутренней раме 10, на которой размещены вторая шестерня 11 кинематического узла и датчик зенитного угла (СКТ) 12, акселерометр 13 установлен на третьей шарнирно закрепленной внутренней раме 14, таким образом, что его ось чувствительности перпендикулярна оси рамы 14, на которой установлена третья 15 шестерня кинематического узла с возможностью взаимодействия через вторую шестерню 11 с первой 7, акселерометр 16 жестко закреплен на нижней части наружной рамы 1 так, что его ось чувствительности перпендикулярна оси 2.
Выход датчика 3 угла поворота наружной рамы через усилитель и контакт реле подключен ко входу датчика момента 4. к этому же входу тоже через усилитель и контакты того же реле подключен акселерометр 16. Выход датчика зенитного угла 12 через усилитель и контакт реле подключается ко входам дополнительного датчика момента 9 к одному из выходов которого через усилитель и контакт реле подключается выход акселерометра 13.
В рамках данной заявки переключение контактов реле не будет рассматриваться, т. к. управление не является объектом изобретения, а предъявлено на чертеже лишь для понятия взаимодействия датчиков между собой.
Работает система следующим образом.
При отклонении оси чувствительности акселерометра 13 от горизонтальной плоскости на вход датчика момента 9 поступает сигнал, в результате чего повернется внутренняя рама 10, на которой расположены датчик 12 зенитного угла и шестерня 11, которая при взаимодействии с шестерней 7 повернет корпус 6 гироскопического датчика угловой скорости, а через шестерни 11 и 15 повернется внутренняя рама 14 с акселерометром 13. В результате ось чувствительности акселерометра 13 вернется в горизонтальную плоскость (выходной сигнал будет равен 0). Датчик зенитного угла 12 выдаст информацию о величине зенитного угла, а выходная ось гироскопического датчика угловой скорости 5 установится по местной вертикали, а его ось чувствительности в горизонтальной плоскости.
Определение азимута проводится известным способом посредством установки наружной рамы 1 в трех положениях:
в начальном,
после поворота на 90o
после поворота платформы от исходного положения на угол 180o.
В результате получим три измерения гироскопического датчика угловой скорости 5 с тремя неизвестными:
U1 = Ug1 + U0
U2 = Ug2 + U0
U3 = Ug1 + U0
где
Ug1, Ug2 - проекции горизонтальной составляющей угловой скорости Земли Ug на ось чувствительности датчика угловой скорости в соответствующих положениях:
Ug1=Ug•SinA; Ug2=Ug•CosA;
U0 - начальная ошибка датчика угловой скорости постоянная в процессе одного включения (запуска).
 .
.
При зенитном угле ϑ = 90° ось чувствительности датчика угловой скорости совпадает с осью внешней рамы (платформы), поэтому поворот оси чувствительности возможен только при зенитном угле ϑ ≤ 60° .
Таким образом если ϑ > 60° , то необходимо перед измерениями (2) и (3) установить платформу под углом ϑ = 60° , развернуть в положение (2) - на угол 90o и затем восстановить действительный Зенитный угол, подключив через контакты реле P2 датчик момента 9. То же повторить при повороте на угол 180o (измерение 3).
Таким образом заявленное предложение обеспечивает высокую точность измерения горизонтальных проекций вектора угловой скорости Земли за счет ошибок, вызванных дрейфом от:
смещения центра веса гиромотора относительно выходной оси гироскопа,
смещения центра давления относительно центра тяжести,
момента трения в цапфах.
Расположение датчиков указанным образом позволяет уменьшить диаметр скважинного прибора.
Кроме того, алгоритм вычисления азимута содержит минимум операций и существенно сокращает время расчета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ГИРОСКОПИЧЕСКАЯ ИНКЛИНОМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ БУРЕНИЯ | 1997 |
|
RU2128821C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ТРАЕКТОРИИ СТВОЛА СКВАЖИНЫ | 1997 |
|
RU2110684C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ АЗИМУТА УГЛА УСТАНОВКИ ОТКЛОНИТЕЛЯ В ВЕРТИКАЛЬНЫХ СТВОЛАХ СКВАЖИН | 2009 |
|
RU2434132C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
Изобретение относится к измерениям геометрических характеристик оси буровой скважины, в частности, к гироскопическим инклинометрам, способным работать в непрерывном и точечном режимах измерения траекторных параметров скважин, как обсаженных так и необсаженных без использования магнитного поля Земли. При отклонении оси чувствительности акселерометра от горизонтальной плоскости на вход датчика момента поступает сигнал, в результате чего повернется вторая внутренняя рама. На этой раме расположены датчик зенитного угла и вторая шестерня, которая при взаимодействии с первой шестерней повернет корпус гироскопического датчика угловой скорости, а через вторую и третью шестерни повернет третью внутреннюю раму с акселерометром. В результате ось чувствительности этого акселерометра вернется в горизонтальную плоскость (выходной сигнал будет равен 0). Датчик зенитного угла выдаст информацию о величине зенитного угла, а выходная ось гироскопического датчика угловой скорости установится по местной вертикали, а его ось чувствительности в горизонтальной плоскости. Определение азимута проводится известным способом посредством установки наружной рамы в трех положениях - в начальном, после поворота на 90o и после поворота платформы от исходного положения на 180o. 1 ил.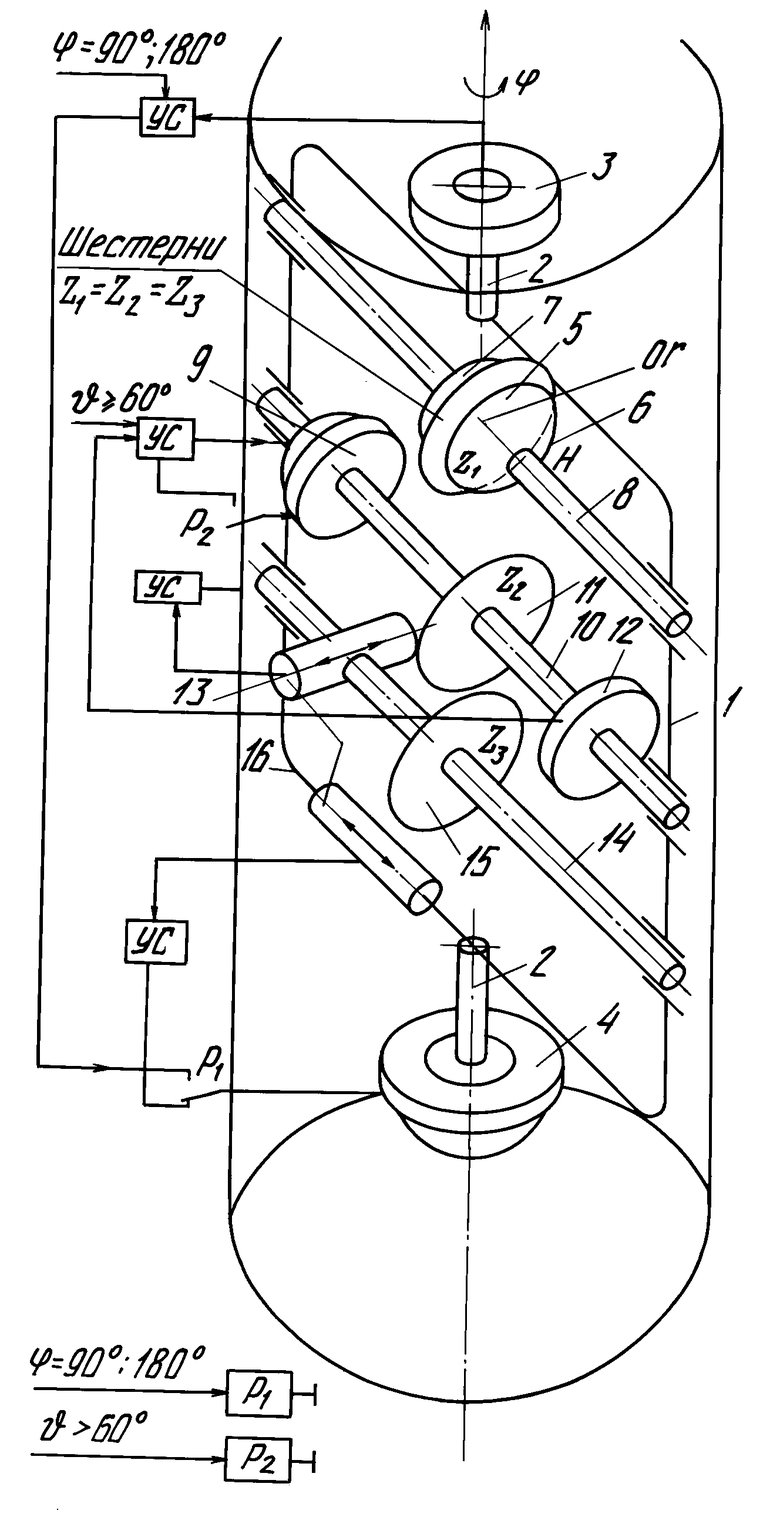
Гироскопическая телеметрическая система контроля нефтяных и газовых скважин, содержащая наземную аппаратуру и связанный с ней каротажным кабелем скважинный прибор, содержащий два акселерометра и гироскопический датчик угловой скорости, ось чувствительности которого параллельна оси чувствительности одного из акселерометров и перпендикулярна продольной оси скважины, наружную раму с датчиком угла поворота наружной рамы и датчиком момента, установленную на оси вдоль оси скважины, отличающаяся тем, что она снабжена датчиком зенитного угла, дополнительным датчиком момента, кинематическим узлом, выполненным из трех шестерен, тремя параллельными между собой внутренними рамами, шарнирно закрепленными на наружной раме, при этом на первой внутренней раме установлен гироскопический датчик угловой скорости, корпус которого выполнен шарообразным и на котором установлена первая шестерня кинематического узла, на второй внутренней раме установлены дополнительный датчик момента, вторая шестерня кинематического узла и датчик зенитного угла, на третьей внутренней раме установлены первый акселерометр, ось чувствительности которого перпендикулярна оси чувствительности второго акселерометра, установленного на нижней части наружной рамы, при этом на третьей внутренней раме установлена третья шестерня кинематического узла с возможностью взаимодействия с первой шестерней через вторую, причем выходы первого акселерометра и датчика зенитного угла электрически подключены с возможностью их чередования к входам дополнительного датчика момента, а выходы второго акселерометра и датчика угла поворота наружной рамы электрически соединены с возможностью их чередования с входом другого датчика момента.
| Исаченко В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1982, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| RU, патент, 2004786, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
