Изобретение относится к автомати- ке к вычислительной технике и монет быть, использовано в системах для чиг лового программного управления рабочими и установочными перемещенияни планшайбы спектиальньк тяжелых товарных станков с заданной скоростью5 а также для позиционирования планшайбы карусельных станков и поворотных столов координатно-расточных, сверл -ль
ных и фрезерных станков.
Цель изобретения - повьшеняе надежности функционирования и расширение области применения а
Сущность изобретения состоит в дос тижении указанной цели путем распшре ния номенклатуры резвимов управления; -.перемещением объекта обеспечения контроля исходного состояния объекга и выполнения в нем определ нных Зло- кировок, организации: контроля недопустимого перебега при заданной величине перемещения, учета износа датчиков перемещения объекта и коррекции на этой основе результатов измергния .параметров, характеризую1дих его поло жение обеспечения регистрации л индикации текущего угла поворота, углов поворота от абсолютного нуля и поворота в приращениях, значения ко™ эффициента коррекции обкатного устройства (ролика), организации оперативного контроля величины тек:/й5е:: о угла поворота от базового значения к ее соответствия требуемому зкачеяи)0г
Отличительными особенностями функционирования данной системы яв аягатс.я обеспечение плавного разгона призо/за до 3заданной скорости S и осутдествле-- ние с этой скоростью заданного перемещения 6аI осуществление перемещения с постоянными фр1ксироваиными скоростями в различных режимах; органи-- зация выполнения группь режимов ковьк перемещений с заданным тпагом;; обеспечение непрерьшного .Бращения с заданной скоростью к выполнение наладочного поворота для определения коэффициента коррекции обкат.ного устройства организация в цешях г.говьш а- ния надежности и безопасности функционирования контроля величин перебега текущего угла поворота от базового значения, требуемого исходного состояния объекта перед началом его пере- мещекия, а также оперативггаго отображения: информацщ-f о з:яачении осноЕигых. параметров„
25409
На фиг, П1я1прпенл структурная
схема cKCTRt-n,i для ирот-раммного управления; ил фиг., 2-9 - функциональные схемы плока зада1 ия режима, формиро нания Т1рограг-1м, блока определения нап- равлен:ня вращения объекта, арифметического устройств; 5 устройства уп- равлен я скоростью, устройства связи .,г, с приводом,, блока передачи кода уп- равлек:ия и блока кс.1чмутр ции соответ-, ственно; на фиг, 10 &; - функциональная схема блока синхронизации; на фиг. 1П 5 - зремениая диагра -чма его
.- работы; на фиг,. 11--15 -- функциональные сх1; -мь соответственно исполнительного yi: тронс;тва S блока регистрации, б.пока пуска поворота, измерительного устройства и блока коррекция обкатного устройства; на фиг, 16-20 - функ- ционал:ьные схемы блоков управления каЕ{Тро 1я и триггеров, формирователей операнда и результата а15Ифметического устройства с.оответс твенно i;a фиг,2171- 25 - функциональные схемы соответственно блокоЕ: -умножения, задания мер- Шзгх перемете НИИ 5 фсрмирователя задакг- щг-гх имг ульсов, блоков к зррекглии скорости и задан.ия скорости устройства
Q у:аравления скоростью; на фиг„ 26-28 функциональные схекы блоков умножения эадер: :1 и и дешифрации устройства с.вязи с приводом ссответстзенно; rta ф)-5Г. 29 и 30 04 к 5 - фуь:кциональные узла конца обрабог-ки блока де- шифра1дш:, блока синхронизации устрой- ства связи с приводом и его временная диг1грам:ма соответственно; на фиг, З -ЗЗ - функцкона.гп,ные схет-Фг блока нулевого положени5, узлов сравнения фаз и выработки и myльcoв измерительного устройства соответственно,; на фиг. 34--36 - временнь е диаграммы ,функц:ионирова ния блока управления арр фмет:ическо о устройства, блока щпевого гголожени.ч п блока - сигналов датчикг. измерительного устройства.
Система для программного управления перемей1ением обьектг: (фиг„ 1) со-- .цвржит блок 1 задания ре:жима5 форми- роватех:ь 2 laporpat-rM, блс К 3 определения направления )а.цения: объекта, арифметическое устройстЕю 4..устрой- ::ТБа управления скорость.ю 5 и связи с привсдон б, б.по;-си передачи кода уи- ойвлени.я 7, куг.а..;ии i, скнхрониза-- фги 9 и индикаьу-1и tj исполнительное устройство 11 J блок 12 регистрации,, объект 13 контроля -; упсавления, блок
35
45
50
14 пуска поворота, измерительное устройство 15, блок 16 коррекции обкат- иого устройства, датчики нулевого положения шпинделя 17, угла поворота объекта 18 и исходного состояния объекта 19, группу выходов 20 режима первьй 21 и второй 22 выходы направления вращения, выход 23 базового i значения, выход 24 управления индика цией, группу выходов 25 кода коррекции, выход 26 коррекции скорости, певый 27 и второй 28 выходы режима блока 1 задания режима, выход 29 пуска, выход 30 заданного угла поворота, ne вый выход 31 режима, выход 32 знака, второй выход 33 режима, выход 34 останова, выход 35 кода скорости формирователя 2 программ, первый 36 и второй 37 выходы блока 3 определения направления вращения объекта, информационный выход 38, группу 39 управ- лягадих выходов 39.1-39.4, выход 40 отказа, управляющий выход 41 арифметического устройства 4, выход 42 уст- ройства 5 управления скоростью,первый 43 и второй 44 информационные выходы, управляющий выход 45, первый 46 - третий 48 выходы группы выходов устройства 6 связи с приводом, выход 49 блока 7 передачи кода управления, третий 50.1 - восьмой 50.6, первый 50.7, второй 50.8, девятый 50,9 и десятый 50.10 выходы блока 9 синхронизации, выход 51 системы, первый 52 - третий 54 выходы блока 12 регистрации, цервый 55.1, второй 55.2 и третий 56 входы системы, первый 57.1 четвертый 57.4 выходы группы выходов блока 14 пуска поворота, 58 и второй 59 выходы нулевого положения, первый 60 и второй 61 информационные выходы измерительного устройства 15, первый 62.1 - третий 62.3 информационные входы, первый 63.1 и второй 63.2 управляющие выходы измерительного устройства 15, первый 64 и второй 65 информационные выходы и выход 66 кода коррекции блока 16 коррекции обкатного устройства и группу выходов 67 датчиков 19 исходного состояния объекта. Блок 1 задания режима (фиг. 2) содержит генератор 68 единицы, который через первьй 69 - третий 71 тумблерные регистры соединены с выходами 23, 25 и 26 блока 1 соответственно, первый 72 и второй 73 элементы ИЛИ, одновибратор 74, переключатель 75,
5 0 Q ,
5
5
первую группу тумблеров 76.1-76.7 режимов, вторую группу тумблеров ,77.1-77.9 , первый 78.1 и второй 78,2 тумблеры задания направления вращения, первый 79.1 и второй 79.2 тумблеры режима и кнопку 80.
Формирователь 2 программ (фиг. 3) содержит генератор 81 единицы, первый 82 и второй 83 тумблерные регистры, первый 84 и второй 85 элементы ИЛИ, одновибратор 86, групповой переключатель, состоящий из переключателей 87.1-87.6, тумблер 88, кнопку 89 пуска, кнопку 90 останова и систему 91 управления верхнего уровня.
Блок 3 определения направления вращения объекта (фиг. 4) содержит коммутатор 92, первый 93 - четвертый 96 триггеры, первый 97 и второй 98 элементы И. Первый 99.1 и второй 99.2 входы группы входов 20 блока 3 определения направления вращения.
Арифметическое устройство 4 (фиг.5) содержит блок 100 управления, блок 101 контроля, блок 102 триггеров, формирователи операнда 103 и результата 104, регистры заданного перемещения 105 и результата 106, счетчик 107, сумматор 108, генератор 109 константы, коммутатор 110, элемент И 111,, и элемент ИЛИ 112, первый 113.1 тринадцатый 113.13 выходы-группы выходов блока 100 управления, первый 114 и второй 115 выходы блока 101 контроля, первый 116 - четвертый 119 выходы блока 102 триггеров, выход . 120 формирователя 103, первый 121 и второй 122 выходы формирователя 104, выход 123 регистра 106, информационный выход 124 и выход 125 переполнения сумматора 108, выход 126 элемента ИЛИ 112, первый 127.1 и второй 127.2 входы группы входов 20 режима арифметического устройства 4.
Устройство 5 управления скоростью (фиг, 6) содержит блоки умножения 128 и задания мерных перемещений 129, формирователь 130 задающих импульсов, блоки коррекции скорости 131 и задания скорости 132, первый 133 и второй 134 счетчики, блок 135 сравнения, первый 136 и второй 137 элементы И, элемент ИЛИ 138, выход 139 блока 128 умножения, выход 140 блока 129 толчковых перемещений, выход 141 блока 131 коррекции скорости, первый 142,1 и второй 142.2 входы элемента ИЛИ 138 г;руппы входов 143-145 режима
5:3
блоков 132, 129 и 130 соответственно, вход 146 пуска блока 129„
Устройство 6 связи с приводом (фиг. 7) содержит первый 147 четвертый 150 блоки умножения частоты,, блок 151 задержки, блок 152 дешифрации, блок 153 синхронизации, блок 154 коммутацииJ счетчики рассогласования 155 и результата 136,, первый 157 и второй 158 коммутаторы.; четвер тый 159.1 - шестой и седьмой 160 выходы блока 152 дешифрации, первый 161 - третий 163 выходы блока 153 синхронизации, первьй 164 и второй 165 выходы бхюка 154 ко1чмутации,
Блок 7 передачи кода управления (фиг. 8) содержит коммутатор 166 первый 167 и второй 168 генераторы констант и элемент И-НЕ 169
Блоков коммутации (фиг. 9) выпол- ней на основе группы элементов 4И - ИЛИ 170„
Блок 9 синхронизации (фиг, lOd) содержит генератор 171 импульсЪв первый 172 - пятьпл 176 счетчики (де- лители частоты) 5 первый Г77-четвер- тьй 80 триггеры, первый 13 - пятый 185 элементы И,
Исполнительное устройство I1 (фиГо 11) содержит последовательно соединенные цифроана/юговый преобразователь 1865 тиристорный :1реобразо-- ватель 187s двигатель 188, Второй вход 47 исполнительного устройства соединен с обмоткой реле 139д через нормально разомкнутьй контакт 190 которого положительный потенциал источника питания подключен :: входу дистанционного перек.ггючателя i 9 1
Блок 12 регистрации (фиг, 12) со-- держит регистры абсолютного положения 192 и текущего угла поворота 193э счетчики абсолютного ПОЛОЖЕНИЯ 194 к приращения 195 и перньй 19 : я второй 197 коммутаторы..
Блок 14 пуска поворота (фиг„ 13) содергкнт коммутатор 198,, первый 199- третий 201 элем&нты И., перзый 202 - TpeTHil 204 элементы ИЛ4,, Первый 205, четырнадцатьй 205.14 входы группы входов 20 режима блока 14 ггуска по}зо- рота, а тахсже первый 206. 1 - третий 206,3 входы группы информационньгх. входов 6/ блока 14 пускг поворота,
Измерительное устройство 15 (фиг, 14) содержит первый 207 и второй 208 блоки сигналов датчика и блок 209 нулевого положения.
Блок 207 (208) сигналов датчика кзмерительногч) устройства содержит узел 210 срзЕнения фаз узел 211 вы- работки импульсовj делитель 212 частоты, узел 213 датчика,фильтр .214 и формирователь 2 15. В блоке сигналов датчика измерительного устройства первый 216.1 и второй 216.2 выходы узла сравнения фаз,первый 217,второй 2 1 8 и третий 2 1 9 вькоды узла 211 выработки импульсов и выход 220 формирователя 215.
Блок 16 коррекции обкатного устройства (фиг, 15) содержит первьй 221 и второй 222 счетчики начального положения, счетчики импульсов 223 и задания 224 первьм 225 и второй 226 делители частоты, узел 227 дешифрации, элемент И 228 элемент ШШ 229, первьй 230 и второй 231 одновибраторы.
Блок 100 управления арифметического устройств (фиГ; 16) содержит регистр 232 сдвига, коммутатор 233, элемент И 234 и одновибратор 235 и пер- вьш 236,1 - четвертый выходы регистра 232,
Клок 101 контроля арифметического устройства (фиг 17) содержит первый 237 и второй 238 триггеры, первый 239 - Т1:1етий 241 элементы И элемент ИЛИ 242 и одновибратор 243.
Блок 102 триггеров арифметического устройства (фиг. 18) содержит пер- зьш 244 - третий 246 триггеры,коммутатор 247J первьм 248 - третий 250 з.пе.менты И эпемент ИЛИ 251 и элемент НЕ 252,,
Формргрователь 103 операнда арифметического устройства (фиг . 19) содержит преобразовател.ь 253 двоично-деся- кода в код с избытком три и коммутатор 254,
Формирователь 104 рез льтата арифметического устройст,8а (фиг« 20) содержит преобразовате.пь 25 5 кода с избытком три и .коммутатор 256, .
Блок 128 умноже:-.ия устройства 5 управ.ленил скоростью (фит , 21) содер- /кят первый 257о1 - п-й 257.п десятичные разрядЫ), ,цый ,з которого состоит из десятичного ;четч:ика 258 с первым Q - четвертым Q ц. выходами, подключенными к :г1е зваму - четвертому входам первой группы информационных входов узла 259 совпадения а также элемент ИЛИ 1оО. взсодами которого являются первые выходы 2б1„1-261.п первого 257-, 1 - п-го 25 7. п десятич.ыых
разрядов. Второй выход 262.i i-rg де- сятичного разряда 257.1 (, п-1) подключен к счетному входу (1+1)-го десятичного разряда 257.1+1.
Счетным входом первого десятичного разряда 257.1 является вход синхронизации блока 128. Первый 263.1 - п-й 263.п входы информационного входа блока 128 соединены с информационными входами ( q) первого 257.1 - п-го 257.п и десятичных разрядов соответственно. Выход элемента ИЛИ 260 является выходом 139 блока 128 умножения. Выход 262.п п-го десятичного разряда 257.п не используется.
Блок 129 задания мерных перемещений устройства 5 управления скоростью (фиг. 22) содержит первый 264.1 - пятый 264.5 счетчики, первый 265 и второй 266 триггеры, первый 267 и второй 268 коммутаторы, элемент И 269, первый 270.1 - седьмой 270.7 входы группы входов 144 режима.
Формирователь 130 задающих импульсов устройства 5 управления око- РОСТЬЮ (фиг. 23) содержит коммутатор 271, первый 272 и второй 273 триггеры, первый 274 и второй 275 элементы ИЛИ, группу управляющих входов 276.1- 276.4, группу входов режима 277.1- 277.5.
Блок 131 коррекции скорости устройства 5 управления скоростью (фиг.24)
Блок 152 дешифрации устройства 6 связи с приводом (фиг. 28) содержит дешифратор 310, узел 311 конца обрасодержит счетчик 278, выход которого
соединен с первым информационным вхо- 35ботки и первый 312 - четвертый 315
дом схемы 279 сравнения. Выход 281элементы ИЛИ. последней является выходом 141 блока
131 и через элемент 280 задержки сое- Узел 311 конца обработки (фиг. 29)
динен с установочным входом счетчикасодержит первьш триггер 316, едикич- 278. Информационный вход блока 1 со- 40|Ным и нулевым входами которого являединен с вторьтм информационным вхо- ются первый и второй входы узла 311
дом схемы 279. Вход синхронизации бло-соответственно, а нулевой выход соека 131 соединен со счетным входомДИнен с единичным (I) входом второсчетчика 278 и управляющим входом схе-го триггера 317 и первым входом эле- мь 279. 45 мента ИЛИ 318. Третий вход узла 311
Блок 132 задания скорости устрой-соединен с вторым входом элемента став 5 управления скоростью (фиг.25) содержит коммутатор 282 с выходом 283, первый 284 - четвертый 287 генератоШШ 318, выход которого соединен с входом синхронизации триггера 317, выход которого является первым выходом
ры ко нстант с выходами 288-291 соот- 50 47 узла 311. Выход генератора 319 еди- ветственно, первьй 292 - третий 294 ницы соединен с нулевым (К) входом
триггера 317. Вторым выходом узла 311 задержки является единичный выход триггера 316.
элементы ИЛИ с выходами 295 - 297 соответственно и первый 298.1 - тринадцатый 298.13 входы группы входов 143 режима блока 132.
Блок 147 (148-150) умножения час- тоты устройства ,6 связи с приводом (фиг. 26) содержит первый 299-1 - п-й 299.п десятичные разряды и эле
-
мент ИЛИ 300. Каждьй десятичньй разряд 299.1 содержит десятичный счетчик 301, генератор 302 константы, выходы которых. и Ч,14 соединены с информационными входами блока 303 совпадения. Первые выходы 304.1 - 304.п десятичных разрядов 299.1-299.п соединены с первым - п-м входами элемента ИЛИ 300, выход которого являет- ся выходом блока 147. Вторые выходы 305.1 десятичных разрядов (кроме 305.п) соединены со счетными входами последукщих разрядов..Вход 160 блока 147 соединен с установочными входами
5 десятичных разрядов 299.1-299.
Блок 151 задержки устройства 6 связи с приводом (фиг. 27) содержит счетчик 306, выход которого Соединен с единичным входом и входом синхронизации триггера 307. Инверсный выход триггера 307 соединен с первым входом элемента И 308, выход которого является счетным входом счетчика 306. Вход 50.7 синхронизации блока 151 задержки соединен с вторым входом элемента И 308, управляющий вход 47 соединен с третьим входом элемента И 308, а через одновибратор 309 - с нулевым входом триггера 307, единичный
0 выход которого является выходом 48 блока 151 задержки.
Блок 152 дешифрации устройства 6 связи с приводом (фиг. 28) содержит дешифратор 310, узел 311 конца обра0
47 узла 311. Выход генератора 319 еди- ницы соединен с нулевым (К) входом
триггера 317. Вторым выходом узла 311 задержки является единичный выход триггера 316.
Блок 153 синхронизации устройства 6 связи с приводом (фиг. 30 а) содержит первый 320 - третий 322 узлы син- хронизаш-ш, первый 323 и второй 324 элементы НЕ.
Узел 320 (321 или 322) синхронизации состоит из первого триггера 3255 йыход которого соединен с информаци- Ьнкым входом второго триггера 326, ход генератора 327 единии., первьй - третий входы узла 320 соединены соответственно с информационным входом триггера 325, входами синхронизации триггеров 325 И 326 и первым входом элемента И 328,, Выход триггера 326 соединен с нулевым входом триггера 325 и вторым входом элемента И 328j, выход которого является выходом -зя.а 320 синхронизации., Н,а фиг, 30 о использованы обозначенг Ш, введенные з:а фиг. 30«,.
Блок 209 нулевого пололсения (фиг„ 31) измерительного устройстза 15 содержит узел 329 сравнения фаз, первьй 330 и второй 331 счетч лки,, первый 332 третий 334 риггеры nepHbDi: 335 - пятый 339; зпестой ,-1 и седьмой 340.2 элементы И и элемент ИЛИ 341.
Узел 210 (329) сравнения фаз (фиг. 32) содержит первый 342 и второй 343 триггеры, первый 344 и второ 345 элементы И,
Узел 211 выработки импульсов блс;- ка 207 сигналов датчика (ф«г 33) со держкт первый 346 - третий 348 триг-- геры, первый 349 - сгдьмой 355 ajie-- ненть Иэ первьп 356 л второй 357 эле менть I ffll I, первьш 35В и второй 359 одновибраторы.
На фиг, 34-36 использованы обозначения, принятые яа фиг, I--33.
Приндип действия и общий алгоритм функционирования системы,,
Режи:м л работы кО мамды пуска-останова и необходимости значения переменных задаются блокам 1 задания режима и формирозатех1е.м 2 програ да, Вращение объекта (планшайбы,) 13 контролируется с помощью датчиков 18 и 17, фиксирующих угол поворота J и вое положение объекта НИ,.,.о
Измерительное устройстгю :5., пользуя эту информацию) а также пульсы синхронизадии, формирует налы обратной связи по r., саналам 60 и 61 ( f Г, и f соответственно)
Hv/ief:.
ке:
и - и - при враш,ении по часс вой стрел;, fу, - при вращении против чассзвой стрелки, а также нулевые импульсы ИИ и НИ2 (выходы 58 и 59), возникающие при пересечении объектом кулевого положения. Информация об утм:овогч полег-женин корректируется блоком 16 с уче- определенного paftee коз ||фициента тсоррекцин обкат -:о1 о устройства (датчик 18) и выдается: в виде двух последовательностей игчггульсов f и f, ,на выходах 64 и 65 „
Исхо1:1;ной информацией для системы
5
0
5
0
b
G
является заданный угол поворота 0, и скорость 5,1 , на (зрой этот угол необходимо отработать. Эта информация .адается фор(-шроват(;лем 2 программ и блоком 1 либс генераторами констант |;/стройства 5 управления скоростью в зависимости; от выбранных режимов функ- :-1ионирования.
Команда Пуск должна иницкирйвать работу системы только в том случае, если осуществлены олределеннью блокировки механизмов перемещения и исход- HONf положении инcтpy 5eнтa что фикси- Р уется датчиками 19 и анализируется элоком 14J кэторьй при выполнении -ЭТИХ условий формирует сигнал Пуск аоворота (выход 57,1).
С псявлеиием сигнала Пуск поворота необходимо начать движение объек- та 13 со скоростью 3,,, Плавный разгон
е
привода обеспечивается устройством 5 /правления скоростью которое осуществляет ее нарастание по линейному закону в течение :зацанного времени. -1нформация о скорости в виде последо- в;1тельности импульсов f , параметры которой соответствуют выбранным ре- ;кимам функционирозания (вьогоды 20 олока I и 33 блока 2) и входным константам (выходы 26 блока 1 и 35 блока 2), поступает --ta вькод 42 устройства 5 и далее на входы арифметического устройства 4 и устройства 6 связи с ПрИ)ЗОДОМо
Величина заданного угла поворота 9 г с выходя 30 формиро1 ателя 2 программ подается в арифметическое устройстве- 4; куда :-фоме того, поступает информация о коде см€ щения базы 9g с Bbrxoj:,a 23 блока 1 и кода абсолютного зна :ения угла поворота 8,. с выхода 12 регистрации.
А.рифметическое устройстве 4 выполняет: определение величины текущ,е- го угла, поворота .эт базы б i
55
(1)
константы А,
cpaBHfij-iHe величин)
бО :
коду одного полного , . выдачу сигнала отказа при б А (выход 40), по этому сигналу осуществляется останов системы формирователем 2; вычисление рассогласования по перемещению (пути) лв
й тб
в
(2)
В некоторых режимах величина и б может формироваться как / 9 © ( ©я значение заданного в приращениях угла поворота) или как / б б ,
Результат вычисления ив записывается в счетчике арифметического устройства 4, вследствие чего сигналом на выходе 41 разрешается выдача устройством 5 и myльcoв f, , количество которых; точно соответствует заданию по пути Л 6 .
Устройство 6 связи с приводом, на которое подаются импульсы f, , в соответствии с сигналами обратной связи f 1 и , поступающими из блока 16 коррекции обкатного устройства, а также с сигналами о выбранном направле- НИИ вращения, поступающими с выходов 36 и 37 блока 3, формирует значение рассогласования по пути. Блок 3 определяет направление вращения по часовой стрелке (ПЧ) и против часовой стрелки (ПРЧ) на выходах 36 и 37 в соответствии со знаками величин и ив (выходы 39 арифметического устройства 4), заданным знаком или Р, g (выход 32 фор1 ирователя 2 программ) или сигналами на выходах 21 и 22 блока 1 в зависимости от заданно- .го режима работы (выход 20 блока 1),
В соответствии с кодом рассогласо- вакия по пути на выходах 43 и 44 уст- ройства 6 связи с приводом выдается управляющая информация, поступающая на исполнительное устройство 11 Млад- шие разряды управляющих кодов подаются на исполнительное устройство 11 через блок 7 передачи кода управления, которые в зависимости от направления вращения и величины рассогласования (выходы 45 и 47 устройства 6 связи с приводом) выдает их без изменения на выход 49 или заменяет их при малом рассогласовании кодами Дотяж- ка, соотзетствующими фиксированной скорости Дотяжка и формируемы ш генераторами хонстант.
Устройство 6 связи с приводом, кроме того, производит оперативньй анализ величины рассогласования и в соответствии с его результатами выда
о 5 g
Q ,-
0
5
ет сигналы конца обработки (выходы 47 и 48) и запрета сверления (выход 46), Сигналами конца обработки может осуществляться останов (приведение в исходное состояние отдельных узлов) системы и выключенное исполнительног о устройства, а сигна.пом с выхода 46, поступающим в формирователь 2 и свидетельствующим о недопустимом перебеге, производ - тся запрет сверления.
В ходе функционировг.ния системь блоко.м 12 рег1;страции в соответствии с управляющ 1ми сигналами от арифметического устройства 4 и блоков 3 и 14 а также сигналадяг на выходе 38 арифметического устройства 4 и и -тульсны- №1 последовательностями f и f, (выходы 64 и 65 5лока 16) организуется формирование и хранение информации об абсолютном положении объекта 9д , угле поворота в приг ящениях 9г,р , а также текущем угле от базы , , Эта информация, а также код коррекции с выхода 66 блока 16 через блок 8 коммутации, управляемьп сигналами с выхода 24 блока 1, подается для визуального контроля оператором в блок 10 нн- дикацш.
Синхронг-гзация работы системы обеспечивается блоком 9, который формирует сетку синхроимпульсов различной часто- ть и скважности.
НазначениеJ состав и алгоритм функционирования отдельных устройств, блоков и узлов системы.
Блек 1 задания режима фиг. 2) предназначен для: задания способов отсчета перемещения в абсолютных (ОА) при инкрементальных (ОИ) размерах, т.е. размерах в приращениях с помощью тумблеров 76,1 и 76.2 соответственно: задания рода работы - Подача (ОД) при котором отработка ведется со скоростью S, за,даБаемой формирователем 12 пpoгpa M5 чл Позиционирование (ПВ), при котором отработка ведется с жестко заданной скоростью (тумблеры 76,3 и 76.4 соответственно), задания режимов наладочного поворота (НЛП),, непрерьшного врашения (НВ) и возврата в абсолютной нуль (ВА) с помощью тумблеров ,7 соответственно, задания режимов медленных (ITH), средних (2ТП) и быстртлк (ЗТП) толчковых перемещенийJ соответствующих немерным толчковым перемещениям (НТП). Эти режимы задаются тумблерами 77. и элементом ИЛИ 72 соответственно за-
Дания режимов мерных толчковых пере-- мещений (МТП элемент ИЛИ 73) с различным maroMj например, с ;иагом 0,001 (4ТП - тумблер 77.4); 0,01- (5ТП - тумблер 71,5), 0,1 (бТП - тумблер
77.6), 1 (7ТП - тумблер 77„7)
10
(8ТП - тумблер 77,8) и 100(9ТП -тумблер 77.9); задания направления вращения - По часовой стрелке (ВПЧ - тумблер 78.1) и против часовой стрелки (ВПРЧ - тумблер 78,2). Эти сигналы вырабатываются в режимах толчковых перемещений (ТП)5 НЛП и НВ; задания кода базового значения - помощью тумблерного регистра 69; управления выбором индицируемого параметра с помощью переключателя 75, ламели 1-4 которого соответствуют выбору данных поступающих на входы 52-54,66 блока 8 (фиг. 9)I задания коэффициента коррекции обкатного устройства с помощью- тумблерного регистра 70, который записывается в счетчик 224 блока 16 по импульсу, формируемому кнопкой 80 и одновибратором 74 з :дания кода р:ор- рекции скорости с поьющью тумблерного регистра 71; задания режимов работь - автоматического (АР) и покадрового считывания (ПС) с помощью тумблеров 79,1 и 79,2 соответственно.
Формирователь 2 niporpaMM (фиг, 3) служит для: выдачи с1 гнала пуска (кнопка 89 и одно&ибратор 36) и останова (кнопка 90)I фop шpoвaния заданного угла поворота ( умблерный регист 82)I выдачи знака угла поворота (тумблер 88); задания кода скооостл (тум- блерньш регистр 83), Эти сигналы и коды формируются в ручном режиме (РР) указанными техническими средствами, а в автоматическом режиме и режиме по кадрового считывания, т.е., при поступ лении сигналов на входы 27 и 28 со-- ответственно, - системой 9 i,, в качестве которой может использоваться система числового npcirpaMMHoro управления токарны п и сверлильными суппортами, например, типа Размер 2М- 1201, Выбор ручного реж1- ма осуществляется переключ ат ; лями 3 7 i -8 7 .. 6 „
Кроме Toroj формирователем 2 программы выдаются: сигнал Р | APVnCvpp на выходе злемента ИЛИ 84,; сигнал Р2 ориентированного останова шпинделя, поступающий на выход 33; снгнз,п останова на выходе элемента ИЛИ 85 при поступлении сигналов на входы и 48 формирователя 2,
0
5
0
в
0
i
Блок 3 определ(;ния направления вращения объекта (фиг, 4) предназначен для автоматического определения направления вращения объекта в различных режимах работы и вьщачи сигналов Вращение по часовой стрелке (ПЧ) и Вравцение против часовой стрелки (ПРЧ).
Триггер 93, элементы И 97 и 98 используются для формирования сигнала . нулевого значения в-г, а триггер 94 - для записи одиночного сигнала, соответствующего знаку + величины 9,-g . Триггер 95 устана шивается в единичное нулевое состояние при йб 7 О (ив 0) , Знаки их величин определяются по наличию сигнала на входе 39«2 (сигнала переноса Р.- на выходе 125 сумматора 108 арифметического устройства 4 - фиг. 5) и соответствующих сигналов синхрониза1дии на входах 39. 1 и 39,3,,
Триггер 96 осушествляет хранение знака величины 0| (зход 32), кото- рьй записывается в него по сигналу на входе 39„4.
Триггеры 93 и 94 в режиме ОИ (вход
99.1)постоянно под ерживаются в нулевом состоянии, а :з режиме ОА (вход
99.2)в них разрев1ается запись инфор мадии.
Коммутатор 92 фо 5мирует на выходах 36 и 37 блока 3 сигналы ПЧ и ГГРЧ в соответствии со следующими логическими функциями:
ПЧ (MTnv НТП V ИВ) ВПЧ V Р1 Р1 (Т94 Т95 - ОА V Т96 ОИ) V Р2 ,
(3)
V (МТЛ V НТП V НВ) в ПРЧ V VP1- p :Z -(T93 OAV T94 T95-OAV VT96 ОИ),(4)
-сигналы на выходах трихтеров 93-98 соот- ветс .т зенно;
-сигналы на входах 21 и 22 с:о(5тветственно р
Р2 - сигналы на входах 31 и 57,2 соответственно
где Т93-Т96
ВПЧ,ВПРЧ
Р1 0 ОИ,ОА,Н11П
МТП,,НТП,, НВ
сигналы на входах 99,1- 99,6 1 руппы входов 20- режима соответственно. Apифмeти ::ecкoe ус;тройсТво 4 (фиг, 5) служит для; вычисления величин g и а б по формулам (1) и (2); осуществления отсчета, временного интерва- j-a5 пропорционально: о в соответствии
пocJ eдoвaтeльнocтьн импульсов t
i-t
1
поступающей от устройства 5 управления скоростью; формирования сигнала блокировки при А; выдачи управляющих сигналов, соответствующих определенным операциям производимых вы числений, в блоки 3 и 12 и устройство 6,
Величина б, вводится в арифметическое устройство через регистр 105, величина б - через вход 23, а константа А задается генератором 109, которьй может быть выполнен на основе генератора единицы и элемента НЕ. Число выводов генератора единицы (элемента НЕ) определяется числом единичных; (нулевых) разрядов кода кон- станты. Аналогично могут быть выполнены остальные генеработы констант, имегациеся в системе,
Блок 100 управления (фиг, 16) осуществляет формирование управляющих сигналов и выполнен на основе схемы кольцевой регистр 232 сдвига - коммутатор 233. Элемент И 234 при поступ- лении сигнала на вход 125 и отсутствии запрещающего импульса на выходе одновибратора 235 формирует сигнал переноса Р, который выдается на выход 113,1 блока 100, На второй вьпсод 113.2 этого блока поступает импульс с прямого выхода одновибратора 235, формируемый при появлении единичного сигнала на выходе 236,1 регистра 232
Коммутатор 233 обеспечивает выдач управляющих сигналов на блоки 101- 104, регистр 106, коммутатор 110 в зависимости от одного из четьфех тактов работы блока (сигналов Г, - t на выходах 236,1-236,4 регистра 232 сдв га), управляющих сигналов z и сигналов режима ОА, ОИ на входах 116, 127.1, 127,2 соответственно и синхроимпульсов tp на входе 50,7. Он может быть описан следукщими логическими функциями (х. - сигнал на выходе 113.1):
(5) (6)
Х5 t,Tj;(7)
х (8)
х, (9)
Х5 ,;(10)
О ,
хэ Р(); (11)
х,„ t, (z,-OHvOA);(12)
х, ( VGA);(13)
х f (z.jOH VGA);(14)
Хз -o-t,.(15)
xj t(,C, ;
09
16
5 0
о 5
0
5
Временная диаграмма работы блока
100управления, поясняющая порядок формирования управляющих сигналов, noKasatia на фиг. 34.
Блок 101 контроля (фиг, 17) предназначен для формирования сигнала отказа в случае, когда , а также сигнала записи кода (9j в регистр 105 при наличии исходного состояния и поступления сигнала пуска поворота.
Если STS входе 113.1 блока
101появляется единичный сигнал при выполнении соответствующей операции (сигнал на входе 113.6) в режимах работы Р1 (сигнал на входе 31) и способе отсчета GH (сигнал на вход 127.1), Это приводит к срабатыванию триггера 238, который формирует сигнал отказа на выходе 114 и через элемент f-ШИ 242 обнуляет триггер 237,
Триггер 237 устанавливается в единичное состояние и формирует посредством одновибратора 243 импульс записи на выходе 115 блока 101 контроля при поступлении сигнала пуска поворота на-вход 57,1 и наличии высокого потенциала на входе 47. В этом случае появляется сигнал на выходе элемента И 239, проходящий на S-вход триггера 237.
Если к моменту окончания сигнала пуска на входе 57.1 не произойдет появление нулевого сигнала на входе 47, что свидетельствует о срабатьтании устройства 6 связи с приводом,включение триггера 237 блокировано (для этого он имеет задержку срабатьюания по единичному входу), Если сигнал на вход 47 придет после конца отработки, то срабатывают элементы И 240, ИЛИ 242 и триггер 237 устанавливается в нулевое состояние,
Блок 102 триггеров (фиг, 18) служит для формирования сигналов управления счетчиком 107 (выходы 117 - 118) и выдачи оповестительных сигналов в блок 100 (выход 116) и на вьосод 41 арифметического устройства 4 (выход 117) .
Основными элементами блока 102 являются триггеры 245 и 246, которые формируют сигналь на выходах 117, 119 и 116 (через элементы И 249 и НЕ 252), При поступлении импульса на вход 115 устанавливается в единичное состояние триггер 244, разрешая прохождение единичного сигнала через элемент И 248. Этот сигнал проходит на
единичньй ,вход триггера 2U5 при появлении импульса на входе 1 13,4, что приводит к йоявлению нулевого сигнала на выходе 116 (срабатывают эжгмен- ты И 249 и НЕ 252) , Одновременно от- крьшается ком1 тутатор 247,, которьй эе- алиэз/ет логическую функцию
Т246 (Р2 X,, . Р2 х
где Т245 (Т246)
к, .X
Р2 след ;. Ю1цеи .л о ги ч е с к о и
(16 сигнал ма единичном (нулевом) д€; триггера 245 (246);
сигналь на входах , 13 „ 3, 113 о 7 и 5 7„ соответственно„
Единичный сигнал с выхода коммутатора 247 поступает на выход 118 блок 102, по которому производится запис ь информации в счетчик 107 и устанавливает (по зaднe fy фронту) в единичное состояние триггер 246, Обнуление триггеров 244-246 осуществляется сигналом на входе 114 или сигналом на входе 126j поступакхци 1 на вход элемента И 250 и далее на элемент HJili 251,
Коммутатор 110 управляет подачей операндов в вычислитель арифметического устройства 4j состоящий из фор- 1чирователей 103 и 104, регистра 106 и сумматора 108. Работа ксмчутатора 110 описывается функцией:
К1 10 8ух. где 8,. , 9.„ е,
,, v 9 X5 а
пост пают с выхода регис:тра 105, выходов 23 и 52 устройства 4,, выхода генератора 109 констант.
Вычислит ел Е. арифметического устройства 4 предназначен для определения величины S0 посредство1ч выполнения операций по форг-гулам (1) и (2), Для работы вычислителя п ;инят двоично-де- сятичньм код с. избытком три, позволяющий в наибольшей степени упростить алгоритм работы и схему 108 сумматора. В связи с этим формирователь 103 операнда (фиг„ 19) ос тцествляет преобразование исход1Гого двоично-деслтичного кода в дво ично-деслтичный код тей в д:ругих режимазс работы систерФг; с избытком три с помощью преобразо- формиро:;;ания импульсов f; пропорци- вателя 253 и выдает его в прямом или обратном коде в зависимости от сигнала на управляющем входе 113„4 комму-ональньп с заданной скорости o-i , 1течения линейного pcisroHa заданной скорости Sr,
Si; обес- привода до
татора 254, а фop f r::lORaтeль 104 ре- зультата (фиг, 20) производит выдачу прямого или обратно ( О кода с избытком три на вь0сод 121 в зависимости от сиг- игла на управляющем входе 113,9 коммутатора 256 и обеспечивает его преобразование 3 ДВОЕ5ЧНЬЙ код с ПОМОЩЬЮ
преобразователя 255 и выдачу на выход 122.
Работа десятичных разрядов преобразователей ходов 253 и 255 описьгоа- ется следуюцими системами логических функций:
0
0
0
v VK,-, , ;
j АЗ -, Я} .-М,
4 3 м , v;;
(18)
rz 21 I
; v;5:v)i vo;-vi.v;
,
(19)
5
5
Где ,M;(,u j - входные (выходные) сигналы преобразователя 253 .(255);
Oj( J-) - выходные (входные) сигналы преобразовател я 233 (255), В регистре 106 осуществляется хранение проме5 еуточн)1х результатов вычислений, а их окончатальные результаты - колЧы Л б (при способе отсчета ОА) или Лб (при способе отсчета ОИ или режиме Р2) - вьщаются на вых;од 122 форми- )ователя 104
Счетчик 107 совместно с элементами 1-1ЯИ 1 12 и И 111 предназначен для отсчета интервала в земени, пропорционального в«гличине ив (лб ) в соответствии с частотой импульсов fi , поступающих на вход 42, После занесения в счетчик 107 кода Дб (Л0) на выходе 126 элемента ИЛИ 112 появляется единичный сигнгш разрешает пос0
f
с входа 42 четупление импульсов рез элемент И 1 1 1 на вычитакщий вход счетчика 107 и вьщачу блоком 102 единичного сигнала на выход 41 арифметического устройстве
Устр:1Йство 5 управления скоростью (фиг. 6) предназна.чено для: приема кода управления скоростью S от формирователя 2 программ в ре:кимах ПД и ИВ| выб.:)ра постоянно заданных скоростей в д:ругих режимазс работы систерФг; формиро:;;ания импульсов f; пропорци-
ональньп с заданной скорости o-i , 1течения линейного pcisroHa заданной скорости Sr,
Si; обес- привода до
Ввод кода заданного значения скорости Sj осущестЕляется блоком 32 задания скорости (фиг. 25). Коммутатор 282 в зависимости от режима работы формирует на выходе 283 код заданной скорости Sj в соответствии со следующей логической функцией:
Sj S(imv НВ)у5ф, (1Tnv2Tn)v Stj I Hnnv БфзПВ V S(P2Y3Tnv ATHV.. ... v9Tn),(20
причем код S поступает на вход 35, коды фиксированных значений скорости S(,,- Зф4 выдаются на выходах 288-291 генераторов 284-287 констант соответственно, сигналы ПД, НВ, 1ТП, 2ТП, НЛП, ПВ, ЗТП9ТП и Р2 формируются на входах 298.1-298.13 и 33 соот- ветственно и подаются на управляющие входы коммутатора 282 или с выходов 295-297 элементов ИЛИ 292-294 или непосредственно.
Счетчики 133 и 134, блок 135 срав нения и элемент И 136 образуют схему линейного разгона, которая обеспечивает плавное увеличение, скорости. Эт происходит следующим образом. Код скорости S,, выбранный блоком 132, поступает на блок 135 сравнения, на второй вход которого подается информация от счетчика 135. Содержимое в счетчике 134 формируется на основании импульсов fp , поступающих с выхода переполнения счетчика (делителя частоты) 133 через элемент И 136. .Коэффициент пересчета счетчика 133 устанавливается в зависимости от выбранного кода разгона, определяющего время линейного разгона (с учетом частоты импульсов, которые поступают на вход 50.9 устройства 5 управления скоростью).
Подача импульсов fр с выхода эле- мента И 136 разрешается при наличии единичного сигнала на входе 41 до тех пор, пока код в счетчике 134 не станет равным коду скорости S, . При
этом элемент И 136 закрывается и дальнейшее изменение содержимого счетчика 134 запрещается. Код, записанный в счетчике 134, принимается за рабочий код скорости Sjp.
Код SJP с выхода счетчика 134 поступает на информационный вход бло- .ка 128 умножения. На вход синхронизации этого блока поступает частота умножения f,j с входа 50.10 устройства 5. На выходе 139 блока 128 умножения форьтируется частота f , про- п орциональная заданной скорости.
Блок 128 умножения (фиг, 21) выполнен на основе десяти шьгх разрядов умножения 257,1-257.п, схема которых построена по принципу совпадения сигналов, поступающих с входов 263.1 (q ...q ) и выходов Q десятичного счетчика 258 (Q , q - значения младших разрядов),
Блок 128 осуществляет операцию
ЕЫ -Sif- (21)
Для одной де-кады а 10, а Sjp может принимать значения 0-9, для двух декад с 100, а Sj 0-99 и т.д.
Выходные сигналы десятичного разряда блока 128 умножения формируются узлом 259 совпадения, который реализует на выходах 261.1 и 262.i логические функции А и А, соответственно:
Л,€ ,,(q qjQ,,-Q,v q Vq,; (22)
{, f., Q,- Q, .
(23)
Сигнал Л 2 является сигналом переноса в следующий разряд, исключающий потерю информации.
Сигналы AT с выходов 261.1-261.п суммируются на элементе ИЛИ 139 и подаются на выход 139 блока 128 умножения.
В режиме НВ или при ПД иногда требуется произвести коррекцию скорости (частоты импульсной последовательности ц,). Эта задача решается с помощью блока 151 коррекции скорости и элемента ИЛИ 138. Импульсы f проходят через элемент И 137 только в режимах НВ или ПД, что фиксируется элементом ИЛИ 138 (на его входах 142.1 или 142.2 в этом случае присутствует единичный сигнал),
Блок 131 коррекции скорости (фиг. 24) осуществляет деление часто- ты импульсов в соответствии с кодом коррекции, поступающим на вход 26 устройства 5. После достижения счетчиком 278 кода К очередной импульс проходит через схему 279 сравнения, так как информация на ее информационных входах П, и Dj совпадает. Импульс с выходя. 28 схемы 279 сравне ня выдается на выход 14 блс-- ка 131, а через элемент 230 задержки (время задержки этог о зле;чента выбирается таким образом, чтобы обеспечить на,цежную выдачу импульса) производит установку единицы н младтем разряде счетчика 278 (чтобы исключить потерю одного импульса) и об1зуля2т остальные его разряды. Таким образоМ; на выходе 141 формируется последовательность импульсов f,, , причем
- 1
кГ
f
(xj
(24)
Импульсы с выхода 139
Олока
128 поступают также в блок 129 тол1.д ковьп: перемещений,, абеспечиванлдий выдачу на выход 140 импульсов f,, коли чество которых определяется заданным режимом работы ТП,,
Блок 129 задания мерньи; перемещений (фиг. 22) предназначен для управления мерными перемеи еггиямк с различным шагом (назначение блока 1 задания режима) , Напри:чер5 при перемещении на 0,001 (режим 4ТП, вход 270,2) он должен обеспечить выдачу , при: перемещении 5ТП, вход 27С,3) f , 5 при переме1:;енн (режим бТП,, зход 270.4) - импульсов f, и т.д. Коммутатор 267 и триггеры 265 к 266 управляют подачей импульсов f,.
1л
через И 269 на входы коммутатора 268 и вход сче гчика 264,1 C le чика 264„1-264,.5 осуществляют л.еле ние частоты fj таким образом, чтобы обеспечить прохождение через элемент И 269 нужного числа импульсов„ Коммутатор 268 формирует сигнал конца тол1ковьгх; перемещений., причем
одного импульса f (режим
на 0,01
десяти импульсов
0,1°
f
на ста
де f.
,, 4ТПЛ ОРР, 5ТПУ , , .л OFF,- 9111
/ С
V -i Ь /
сигналы на выходе элемента И 269 (выходе 40 блока 129)j
сигнал переполне iii H счетчика . , ,„5;
т пм
OFF. 4ТП-9ТП - сигналы-«а входах 270,, 2- 270Л блока 129 соответственно.
Для рассмотренного примера счетчики 264 о 1-264„5 должны иметь хоэф- фидиенты деления5 раненые десяти.
0
0
Коммутатор 2п7 реализует на своих а ;рвом - третьем выходах следующие логические с)ункции:
K267s МТП Т2б 3- ПЛ;
К267я1 nil Т266 V ОСТ;(26)
К267., ОСТ V К263,
где ЖП, ПП; ОСТ - сигналы режима МТП,
луска поворота и эстанова, поступа- :о1дие на входы 270,1 146 и 34 со ответственно,
Т265 (Т266) - сигналы на нулевом зьгходе триггера 265 (266).
При поступлении сигнала ПП триггеры 265 и 266 устанавливаются в единичное состояние,, при этом выдача сигнала на первом выходе, блокируется низким потен:циалом с выхода триггера
265для предотвращечия повторного прохо5{ дения сигнала ПП до окончания
5 выбранного толчкового перемещения Единич 1ьй сигнал с выхода триггера
266открывает элемент И 269 и разрешает прохождением и;-тульсов с, на выход 140 блока 129 и на вход цепоч- jcii счетчиков 264„1-264.5.
S зависимости от заданного режима сигнал на выходе KciMi ryTaTopa 288 появляется герез определенное число им-ь
пуяьсов
f,
w триггера
и производится обнуле- 266,, а затем триггера
0
0
265 (при отсутствии сигнала ПП).
И fflyльcныe последовательности f , 1;, и f-rr,цл,с. выходов 139s 141 и 140 блоков 128s 131 и 139 соответственно поступают на инф|эрмационные входы формирователя 130 задающих импульсов (фиг 23) 5 которьй 13 зависимости от режима работы коммутирует одну из них на выход 42 устройства 5 управления скоростью.
При режиме ЕД ( 276;4) и НВ (вход 277„5) используются импульсы f- , поступающие на нход 141, при отработке нерньЕх то/ Ч1совьЕх перемещений - импульсы f гпм, вх(5да 140, в осталь- ь ых случаях - импул зсы t с входа 139,
Количество постуцивпшх им лульсов в режимах ПД , ПВ (вход 276.3) возврата к нулю Р2 (вход 276.2) опре- l:eляeтcя длительностью сигна:аа ДА на входе 41 блока 130,, в ре:1киме НВ (вход 277 „4) - длительностью сигна-гта разрешения непрерывногс нращения Т272 на
23132546924
выходе триггера 272, в режиме немер- Узел 322 синхронизации в канале ) толчковых перемещений (сигнал НТП f синхронизируется импульсами f ha выходе элемента ИЛИ 275) - длитель костью сигнала ПП на входе 276.1, а в режиме наладочного поворота НЛП (вход 277.5) - длительностью единич.(выход элемента НЕ324) и f 50.2).
TI
(вход
ного сигнала Т273 на выходе триггера 273.
Временная диаграмма работы узла 320 синхронизации приведена на фиг. 30 б . По переднему фронту импульса на входе 64 устанавливается в Триггеры 272 и 273 устанавливают- IQ единичное состояние триггер 325, а ся в единичное состояние сигналом на по переднему фронту и шульса на вы- входе 276.1, а устанавливаются в нуль ходе элемента НЕ 323 - триггер 326. сигналами с выхода элемента ИЛИ 274 (т.е. сигналом останова на входе 34 и нулевого положения на входе 59) и с входа 34 соответственно.
Таким образом, коммутатор 271 реПервый импульс с входа 50.3 проходит через элемент К 328 на выход 16 узла
15 синхронизации. Обнуление триггеров 325 и 326 осуществляется единичным сигналом с выхода триггера 326 и передним фронтом импульсы с выхода эле мента НЕ 323.
ализует следующую логическую функцию
K271 f n VT272-f НЛПУНТП-fц ПП VP2 - f -flAvnB v f(-flAVHB-f,.T273v
(27)
VПД f.,- ДА.
2Q Блок 154 коммутации обеспечивает ввод кода рассогласования в счетчик 155, что достигается передачей импульсов f только на суммирукяций вход счетчика 155 и коммутацией сйг25 налов обратной связи f
WK
в СОУстройство 6 связи с приводом (фиг. 7) обеспечивает: определение рассогласования между заданным и истинным положениями объекта; формирование управляющих кодов, соответствующих этому рассогласованию, и переда- и f,j( подключаются к разным входам чу их совместно с блоком 7 передачи зо счетчика 155, что предотвращает на- кода управления на исполнительное уст- копление ошибки при вибрации ротора ройство 11; выдачи сигнала конца от- датчика обратной связи.
ответствии с выбранным направлением вращения (сигналы ПЧ и ПРЧ на входах 36 и 37 соответственно) . Сигналы f
работки (СКО) и задержанного сигнала СКО (СКОЗ), а также сигнала запрета сверления (СЗС) при недопустимом перебеге.
На входы 64 и 65 устройства 6 и блока 153 синхронизации этого устройства поступают импульсы ьбратной связи f ик и fwk. от блока 16, на вход 42 - импульсы задания f, , а на входы 50.2 и 50.3 - импульсы f . с выходов блока 9.
Блок 153 синхронизации (фиг. ЗОа) обеспечивает разнесение во времени сигналов f. , f йк и сигналов f , что необходимо для правильной работы схемы устройства 6 связи с приводом. Блок 153 построен на трех идентичных узлах 320-322 синхронизации, формирующих разнесенные во времени сигналы fuK fUK f v выходах 161-163 соответственно.
Узлы 320 и 321 синхронизируются одними и теми же импульсами f,(выход элемента НЕ 323), f (вход 50.3) поскольку сигналы f y и fj заведомо не совпадают во времени.
Узел 322 синхронизации в канале f синхронизируется импульсами f
.(выход элемента НЕ324) и f 50.2).
TI
(вход
Временная диаграмма работы узла 320 синхронизации приведена на фиг. 30 б . По переднему фронту импульса на входе 64 устанавливается в единичное состояние триггер 325, а по переднему фронту и шульса на вы- ходе элемента НЕ 323 - триггер 326.
Первый импульс с входа 50.3 проходит через элемент К 328 на выход 16 узла
синхронизации. Обнуление триггеров 325 и 326 осуществляется единичным сигналом с выхода триггера 326 и передним фронтом импульсы с выхода элемента НЕ 323.
Блок 154 коммутации обеспечивает ввод кода рассогласования в счетчик 155, что достигается передачей импульсов f только на суммирукяций вход счетчика 155 и коммутацией сйги f,j( подключаются к разным входам счетчика 155, что предотвращает на- копление ошибки при вибрации ротора датчика обратной связи.
налов обратной связи f
WK
в СОи f,j( подключаются к разным входам счетчика 155, что предотвращает на- копление ошибки при вибрации ротора датчика обратной связи.
и f,j( подключаются к разным входам счетчика 155, что предотвращает на- копление ошибки при вибрации ротора датчика обратной связи.
ответствии с выбранным направлением вращения (сигналы ПЧ и ПРЧ на входах 36 и 37 соответственно) . Сигналы f
35
Блок 154 коммутации описывается следующими логически1-1и функциями по выходам 164 и 165:
f V f;; . iT4v f;J прч;
. --ч
f:,-nP4Vf- ,.
ПЧ,
(28)
Во время отработки в счетчике 155 накапливается код рассогласования, а после ее окончания хранится величина перебега,
Блок 152 дешифрации (фиг. 28) анаизирует состояние счетчика 155 и выабатывает сигналы Лр (нулевое рассогласование) , Л,, Л и
dj на выхо
ах 45, 159.1-159.3 дешифратора 310 и элементов ИЛИ соответственно, указьгоающие в каком из диапазонов находится величина рассогласования, а также формирует сигнал СЗС на выходе 46. Входы элементов И.ПИ 312- 312-315 подключены к выходам дешифратора 310, соответствующих значениям рассогласования, накопившегося в счет счетчике 155,
251325А
Узел 31,1 блока 152 (фиг, 29) формирует сигналы СКО и сброса бло-ксв 147-150 на выходах 160 и 47,
Триггер 316 устанавливается в единичное состояние сигналом .jp на РХОДС Д5, что приводит к срабатыванию триггера 317 (по заднему фронту импульса, проходяп(его на вход I и через элемент ИЛИ 318 на К-вход этого тригге- -JQ pa). Обнуление триггера 316 происходит по сигналу с выхода дешифратора 3tO, соответствующего единичному состоянию счетчика 155, а триггера 317 - импульсом на входе 39.4,
По сигналу СКО на выходе 47 блока дешифрации блок 151 задержки (фиг,27) формирует задержанный сигЕчал СКОЗ, предназначенный для сообщения системе 91 (фиг, 3) о том. что отработка jo закончена Блок 151 построен на основе счетчика 3065 коэффициент пересчета которого определяет необходимое время задержки. При поступлении сигнала на вход 47 счетчик 306 заполня- 25 ется импульсами,, проходящими с входа 50,7 через элемент И 308 Tlocjie появления сигнала переполнения счетчика 306 устанавливается в е;г,иничмое состояние триггер 307, который выдает ЗО сигнал СКОЗ на выход 48 и закрьпзпет элемент И 308 „ После окончания сигг,- -- ла СКО срабатывает одиовибратор 309 и обнуляет триггер 307 с :-задержкой,, обеспечивающей формт-пзование сягиала ,.j. СКОЗ требуемой длительности,,
В соответстви с ; прав,ллю1ии п- сиг
налами на выходах 1 59 „ Г- 59 „-3 на входы счетчика 156 поступаюо: имггульсы с выходов 164 и 165 б,лока 154 и вы- др ходов блоков 147 - 150 умножения частоты соответственно„ Это обеспечивает реализацию кусогшо-линейной зависимости между информацией,, содержащейся в счетчике 155 (рассог ласс;ва- ц кием), и управляющим -: кодами, форми- рующи1 1ися в счетчике 156,
Конструкция и ,:;ействия блоков 147-150 (умнсчкеник частоты (фиг. 26) аналогичны Злоку 128. Ог- Q личие состоит в том, что С игна.пь; задаются в блока5 147-50 ;:: помо- щью генераторов 302 конст,ант.
Таким образом, ка выходах 43 и 44 счетчика 156 и устр01 ;ствг 6 формиоу- .г
CD
ются управляюпр1е коды, связанные заанной зависимостью с величиной рассогласования требуемглм к еским значениями перемещения об-ь; кт г:.
0926
Блсгл 7 перелзчу кода управления (фиг. 8) предназигчсл для управления передачей младшг;х разрядов управляющего кода на исполнительное устройство I 1 в зависимости С)Т направления вра- гаения (сигналы ПЧ и ПРЧ на входах 36 м 37), тзеличпны рг.ссогласования (сигнал, соответствующи; А на входе 45) и | аличия сигнала конца отработки (вход 47) . .
/5,31 СКО , на выходе элемента И-НЕ :69 присутствует единичньй cnrHaj-i, который p;i3peniaeT прохождение кода с входа 43 иг; выход 49 коммутатора 116 для изменения о Если
СКО
- о, на вьгх.од ком утатора 16 проходит код Дотяжка, с выхода генератора 167 (168) константы при () Зто позволяет обеспечить выдачу млад- игих разрядов управляющего кода с учетом характеристик исполнительного устройства 1 1 ,
Блок 8 ко№1утации (фиг, 9) управ- ,ляет передачей в блок 10 индикации в соотве.тствии с сигналами на входе 24 (положения переключателя 75 в блоке 1 задания режима)„
Блок 9 синхронизации (фиг, 10а) формирует тактовую сетку системы и обеспеч-чвает синхронное функциониро- нанрге ее основных ус:тройств н блоков.
Генег атор 171 последователь iiocTb импульсов f,- высокой частоты, поступающей на выход 50,1 (фиг, 10б)„ Эта частота д елится счетчиками 172 - 76 до 5 еобход, величины. Триггеры 77-180 по с1- гналам переполнения со- ответствую1ии с счет чиков формируют импульсные последовате.льности типа Ме- , 1ндр и з-правляют работой элементов И 81-184.
Блок 10 ин;: икаци1- предназначен ,г,ля отображения икфсфмации, поступа- к)и1ей с выхода блока В коммутации. Блок :0 может 6biTij построен на основе пос- едовательнс1 о соедр нен,ия дешифратора и инднкгторн,:ых лакп (или светодиоИсполпитсльное устройст;зо 1 1 |,фиг , I 1) ос у1цестЕ;ляе ; преобразование гсода поступающегг с. выходов 49 блока 7 передает, код;; правления и 44 устройства 6 св. г, приводом, в электрический посредством цифро- ,;1на,логового преобразователя 186 о С вы- :кода цифроапало оЕОгс преобразовате™- ;(я 186 сигнйл псхп упает в тиристор- ь 8 7 , котор1 ш обеспечивает усиление сигнала и его выдачу на двигатель 188 механизма углового позиционирования объекта (планшайбы), перемещение которого контролируется датчиками Г/ и 18.
Отключение двигателя 188 производится контактами реле 191 (дистанционного переключателя), которое срабатывает при замыкании нормально ра- зомкнутых контактов 190 реле 189. Реле 189 срабатьшает при поступлении сигнала на вход 47 исполнительного устройства 1 1.
Блок 12 регистрации (фиг, 12) поз- воляет осуществлять формирование и регистрацию кодов, соответствующих у ловьм перемещениям объекта, отсчитанным от абсолютного нуля 9„ (счетчик
194 и регистр 192), от выбранного ба-
зового значения - текущего угла поворота (регистр 193) и приращениям угловых перемещений планщайбы (коммутаторы 196 и 197, счетчик 195),
Информация о перемещении, отсчитанном от нуля , накапливается в реверсивном счетчике 194, на счетные входы которого поступают импульсы
ик Mit входов 64 и 65 блока 1/ регистрации соответственно , формируется в счетчике 194 за счет того, что его сброс осуществляется по импульсу НИ2, поступающему на вход 59 блока 12. Импульс НИ2 (импульс нулевой отметки) привязан к определенному положению объекта планшайбы.
Принцип формирования импульса НИ2«
Информация о значении 9-го о сигналу на входе 39.5 блока 12 регистрации переписьтается из счетчика 194 в регистр 192 и выдается на выход 52 блока 12 и далее в арифметическое устройство 4 и блок 8 коммутации.
В регистре 193 хранится код о перемещении 9f, отсчитанном от выбранной базы, который поступает с выхода 38 арифметического устройства и записывается в регистр 193 по управляющему сигналу на входе 39,5 блока 12 регистрации.
Информация о приращении угла поворота б „р накапливается в реверсивном
195 в соответствии с импульКод
счетчике сами f
и f .j , поступающими на входы 64 и 65, и сигналами ПЧ и ПРЧ, определяющими направление вращения и подаваемыми на входы 36 и 37 блока 12 регистрации.
Поскольку при вращении против (по) часовой стрелки формир ьтотся импульсы йк) на входе 64 (65), а импульсы (f ) появляются только при вибрациях планшайбы, то коммутаторы 196 и 197 описываются следующими логическими функцияьш:
f, . ГП Ч Vf
ИИ
ПРЧ Vf ,
ПЧ;
пч,
(29)
Таким образом, в режиме приращений основная инфopмaIJ я поступает только на суммирующий вход счетчика 195, что исключает нозможность искажения информации при заполнении этого счетчика по вычитающему входу 06нуление
счетчика Т95 входа 57.1 и
производится сиг- блока 12 регистналом с рации.
Коды 9-г 5 и 8 пр с выходов 53 и 54 регистра 193 и счетчика 195 соотвёт- ственно подаются в блок 8 коммутации.
Блок 14 пуска поворота (фиг. 13) предназначен для: запрещения прохождения команды Пуск при отсутствии сигналов, подтверждающих вьшолнение
30 определенных блокировок в объекте и исходное состояние инструмента в заданных режШ ШХ функционирования; формирования сигнала пуска поворота (ПП) при выполнении блокировок, выдачи 22 сигналов модифицированных режимов работы Р2
ПВ
и ПД .
0
5
0
5
Сигнал ПП формируется на выходе 57,1 блока 14 коммутатором 198 при наличии сигналов пуска (П) на входе 29 и блокировки механизма перемещения (БМ) на входе 206,3 группы информационных входов 67 блока 14, во всех режимах работы устройства. Конъюнкция сигналов П и БМ реализуется элементом И 201,
Запрещение выдачи сигнала ПП коммутатором 198 производится при: отсутствии сигнала исходного положения инструмента ПП на входе 205.1 в режимах толчковых перемещений 1ТП-9ТП (входы 205.5-205,13), наладочного поворота НЛП (вход 205,14), режиме Р1 (вход 131) при задании рода работы ПВ (вход 205.2) и отсутствии сигнала Р2 на входе 33, и режимах возврата в (вход 205.4) и Р2 (вход 33), Б этом случае единичные сигналы с выходов элементов И 200, ИЛИ 203 и 204 не проходят на выход 57.1 коммута29
тора 198; отсутствии сигнала ровкн вращения (БВ) на яходе 206„2 блока 14 в режиме непрер,1вного вращения (сигнал НВ на входе 205,3) и режиме Р1 (вход 31) при задании рода работы ПД (вход 205 o i) и отсутствии сигнсша Р2 на входе 33. При этом е/,н ничные сигналы с выходов злементов И 199 и ИЛИ 202 не проходят чере:) коммутатор 198.
Таким образом, условия формирования сигнала ГШ на выкоде .: 7 „ 1 коммутатора 198 описываются следующр.й логической функцией;
БМ . (НЛП V1ТПS 2ТП „ . о v9ТП VBpVP2vnB-P1- Р2)- (НВУГЩ-1 Ъ Р2) -БВ .(30)
Кроме сигнала ПП,, на вь ходах 57/2 57,Д блока 14 поворота элементами ИЛИ 203J И 200 и И 199 соответственно выдаются сигналы ьюдифици- рованных режимов Р2 , ПВ и ПД j условия формирования которьк описываются выражениями
;Р2 BOV Р2;;
|ПВ ПВ (31)
ПД Щ-Р1- Р2.
Измерительное устройство 15 (фиг, 15) слл. для; формирова;;ия последовательностей кмпульсов f и f (зыходы 60 и 61), параметры которьк лропорциональнь углозому перемещению объекта, в соответствии с ин форма:аиеЙ5 поступающей от датчика 18 обкатного устройства,; выдачи импульсов нулевого положения НИ1 н НИ2 (выходы 38 и 59) при повороте на 360 и 720 соответственно в соответствии с Информацией, формируемой датчиком 17 шпинделя формирования питающих напряткений :5адан;-юй частоты для датчиков 17 и 18..
Б состав измерительного ус ройст- ва 15 входит два блока 207 и 208 С1-;Г налов датчика, выполкгннык по идентичной схеме, и бло: с 209 нулевого положения. Блоки 207 и 208 ciirnsinoB датчика формируют двухфазные сигналы, питающие датчики 17 и 18 соответственно (выходы 63,1 и 63,2),, и преобразуют угол сдвига фаз мехзду н;-г- Пульсами fg (вход 50„6) и входными импульсами датчиков 17 и 18, поступающими на входы 62„1 и 62,2 измеритель ног о устройства, в код, несущ гн ин-25А09 3
формацию о частоте вращения вала датчиков ,
Блок 207 (208) работй.ет следующим образом.
Схема блока 207 представляет со- .бой следящую систему регулирования рассогласования ф;;1з опорного сигнала -л вьгаодного сигнала фазовращателя
1П ФВ (датчик работает в режиме фазовращателя), пропорционального частоте :зращения вала ФВ, которая поддерживается постоянной и равной частоте опор- чого сигнала.
f Вьс одной сигнал датчика поступает г, входа 62, в -узел формирования сигнала датчика;, состоящий из последо- зательно соединеннык фильтра 214 и срормирователя 215„ Фильтр 215 может
2Q бь1ть выполнен, например, в виде двух последовательно включенных активных (Ьильтроз верхних частот второго по- эядка и сл 7кит для выработки первой | армо1шки напряжения с выхода датчи25 ка. Сигнал с выхода фильтра 214 поступает в фор1 ШроВ 1Т12ль 215, преобразующий синусоидальное напряжение в прямоугольное. Форм 1рователь 215 мо- лет быть выполнен, например, на осно30 ве усилителя и транзисторного ключа, предназначе нного цпп получения крутого фронта импульсов f..,,,. несущих ин0 ЬЛ
формацию о П(зложе - ии датчика,
Узел 210 (фиг, S .l и 36) осуществ-Г яеf
0
:равне - ие фаз сигналов г
и
g.;,,. И формл-фует сигнал Q(Q ) на вы- 216.1 (216„2) в случае опережения (отставания) гю фазе сигналом Г и,, с входа 50,6 сигнала f, , посту- Г ающего с выхода .220 формирователя 215.
Это происходит следующим образом, В исходном состоян.ии триггеры 342 и 343 обнулены по входу 320, Если пер- поступае- слггу.ап f вих вход : 0,6 (220)5 после прихода сигнала
Г
(f
1
о,г
па вход 2.С (50.6) узла по- :п 1яетск единичнг ю с:игна.п на выходе злементг. К 344 (345, которьм триггер 342 (343) ус;танавливаетсч в единичное состоя1п- е, Б результате на выходе 2 1 о „ I (216,2) поянл :ется единичный сигнал, который закс.пчивается после скопчанкя спг нала HS. входе 220 и установки триггера 342 (343) в нуль. Б гечение времени, Ь-Огда триггер 342 (343) находится в ес.иничмом состоя- };и1а, элемент И 345 (344) остается
31
закрытым и запрещает установку в единичное состояние триггера 343 (342).
Сигналы Q и Q с выходов 216.1 и 216.2 узла 210 сравнения фаз поступают на информационные входы узла 211 выработки импульсов.
Узел 211 вьфаботки импульсов (фиг. 33 и 37) в соответствии с сигналами Q и Q от узла 210 и синхроим пульсами, поступакхцими с входов 50.4 50.6 измерительного устройства 15, формирует последовательности импульсов f{, м S выходах 218 и 219 соответственно, число которых пропорционально разности фаз опорных сигналов {„п и чика , импульсов f, , поступакщих с выхода
Qf, п выходных сигналов дат а также последовательность
217 через делитель 212 частоты и узе 213 питания датчика на выход блока 207.
В узле 211 могут быть выделены: канал формирования импульсов f. , состоящий из триггера 348, элементов И 351, 353 и 355, элемента ИЛИ 357 и одновибратора 358. Триггер 348 устанавливается в единичное состояние по гтереднему фронту сигнала f на входе 50.6, по которому одновибратор 358 формирует импульс, проходяпшй через открытый элемент И 357 (сигнал рл 0) на единичньй вход этого триггера. В течение интервала времени до поступления сигнала Q на вход 216.1 триггер 348 остается в единичном срстоянии и через элемент И 353 на выход 218 поступают импульсы f. с входа 50.5, образуя последовательность f, Триггер 348 обнуляется сигналом с выхода элемента ИЛИ 357 при поступлении сигнала Q на вход элемента И 351 и наличии синхросигнала fpjj на входе 50.4 или поступлении сигнала Qj на вход 216.2 узла 211; канал формирования импульсов f содержащий триггеры 346 и-347, элементы И 349, 352 и 354, а также одно вибратор 359. При поступлений .сигнал QI на вход 216.2 одновибратор 359 формирует импульс, который проходит через открытый элемент И 354 (сигнал fgn на входе 50.6 отсутствует) и устанавливает триггер 347 в единичное состояние. Первым импульсом „.- ,поступающим на вход 50о 5 и далее через элемент И 352, происходит установка в единичное состояние триггера 346. В результате открывается элемент И
325Д09
32
-,. -
349 и импульсы f,
осн
с входа 50.4 поступают на выход 219 узла 211, образуя .последовательность f„; канал формирования импульсов fj., содержащий элементы И 350 и ИЛИ 356.
Частота импульсной последовательности f, равна алгебраической сумме частот последовательностей синхроимпульсов f д„ и коррекции f . Если сигналы f
и коррекции . опережают сигналы f
$Ь()1
т.е. работает канал формирования им- Ьульсов f, через элементы И 350 и ИЛИ 356 на выход 217 проходят импуль- 15 сы последовательности f„, с выхода элемента И 353, синхронизируемые импульсами и последовательности - входами 50.4. Следовательно в этом случае увеличивается частота последо0
вательности f, Если же сигналы
по f
on
отношен 1ю отстают
к f
от
слн сиг
налов f gdiv, работает канал формирования fц ив течение времени нахождения триггера 346 в единичном состоя- НИИ блокировано прохождение импульсов
последовательности „.„ через элемент
осн
или 356. Это обеспечивает уменьшение частоты последовательности f по отношению к fjcK . Таким образом обеспечивается регулирование рассогласова- . ния фаз опорных сигналов и выходного сигнала датчика.
Импульсная последовательность f- с выхода 217 узла 211 поступает на елитель 212 частоты, который преобразует ее в последовательность импульсов fy питания датчика, поступа- ющую на узел 213. Последний может быть вьтолнен на основе счетчика с пе- рекрестными связями, вырабатьшающих
тельно друга на 90 , и двух последовательно включенных со счетчиком усилителей мощности (по числу фаз.питания датчика).
С первого - третьего информационных выходов блока 207 (выходов 218 и 219 узла 211 и выхода 220 формирователя 215) сигналы f , f и f поступают на первый - третий информа- ционные входы блока 209 нулевого положения, который формирует импульсы НЙТ и НИ2 на выходах 58 и 59 измерительного устройства 15.
Сигналы ft, и fм с первого и второго информационных выходов блока 208 вьщаются на выходы 60 и 61 измерительного устройства 15.
5
0
5
33
Рассмотрим назначея ие. npHFn.i,Hn построения и функционирования блока 209 нулевого положения (фиг , 31 и 35). Блок 209 нулевого положения предназначен для формирования сигналов нулевого положения (нулевых импульсов НИ1 и НИ2) об7:,екта - г лани1ЛЙ бы, жестко привязанньп к определенному ее положению, относительно которого задается и отрабатываете ч угол поворота.
Для формирования сигнала нулевой отметки в схеме испол:ьзована привязка к полюсам датчика положения планшайбы путем формирования цифрового кода положения в пределах у:г лового перемещения ротора датчика 17 относительно статора на пару полюсов,
Информация об углоном положегши ротора датчика относительно статора в пределах перемещения на пару полюсов заключена в рассогласовании фаз опорного и питающего датчик напряжг- ний, сравнения которых осуществляете узлом 329. Код положения в пределах пары полюсов формируется при стоящей планшайбе на счетчике 330, на зход|,1 которого подается последовательность импульсов с фиксированной частотой следования в течение интервала ни, соответствующего рассогласованию фаз опорного и питающего наггряжени ;, поступающих на входы 50,6 и: 220 уз- ла 329.
Конструктивное выполнение и при г- цип действия узла 329 полностью идентичны узлу 210 (фиг„ 32),, Кг.ли импульсы опорной частоты f (отстают) по фазе импульсь:
( Г1ережа1:1Т
СП
ЪЫ ледовательность импульсов , с вгчОда 50,4 через элемент И 335 (336) проходит на суммирующий (вычитаьлщий) вход счетчика 330„
Выходные сигналы f
и Г., Х ЗЛсЧ
и
211 выработки импульсоз, посгупаю1цке на входы 218 и 219, несут информацию об угловом перемещении ротора датчика 17 относительно пром знольного взаимного положения ротора и статора в момент начала движения. Эта ннфор - мация отсчитывается в счетчике 331 .
Как угловое положение рот ора в г:е вом случае, так и его относительное смещение во втором, выражены в одних и тех же единицах отсчета, поскольку цяя измерения временных интервалов (рассогласования фаз) Е) обоих случа25409ЗА
ях используется и та же залолня- ,а ч частота .
Таким образом, Е{ачи)ая отсчет углового перемещения ротора не с нуля, а с зафиксироЕЗниого в момент начала диижения кода положеьия ротора датчика относительно статора, можно получать периодически повторяющуюся Р раз
-jQ за оборот (Р - число пар полюсов датчика) кодовук информацию о взаимном . расположении ротора и статора датчика в пределах одной парь: полюсов
JiTH устранения неоднозначности 15 используется сигнал нулевого отсчета датчика, поступающий на вход 62.3, которьгй формируется при перемещении целевой диафрагмой насаженного на ось датчика диска оптической оси 2Q n:ap.i светодиод - фотодиод.
Угловая ширина S д. диафрагьо,; выбс / 360° ,. рана так, что S ---, Совпадение
5
импульсного сигнала, вьщeJ7eннoгo из кода на пару полюсов на вьгходе счетчика 331j с сигналом нуле}зого отсчета датчика, поступающим на вход 62,3, элементе И ,1 принимается за ну- 1свую отметку углового положения плак- 1 ;лй5ы (импульс НИ 1 . ВЫХОД 58 блока 209) ,
Кроме то го 5 каждьй второй импульс liin проходит через элемент И 340,2 я образует на выходе 59 импульс НИ2. Формирование импульса НИ2 ос тнествля- ется с помощью Т-триггера 334з разре- мюш.его прохож;1.ение через элеме гт И 3 iO,2 каждого пторсго импульса пе- ррполнения счетчика 331.
Счетчики 330 и 331 могут быть соб- раь:, на микросхемах К 155 ИЕ 6, Счет- ч.ик 330 один раз за период опорной последовательности импульсов f вычисляет код yi noBoro положения путем 1одс:чета иг-отульсов f и f ,5 формируемых на вьпсодах элементов И 335 и
0
Эти импульсы поступают на выходы элеь ентов И 333 и 336 только при низком уровне сигнала f ,,, на Еходе 50,6
За время положительного полупери- эд.1 сигнала f,,,, производится парал- лгхтьная порезались кода псложения ро- TOjia неподвижного датчика в пределах пары полюсов ;-t счетчика 330 в счет- .:;-:к 331. При этом отк;рьшается эле- MPiiT И 339,, поско.пыгу триггер 332 ранее устанав,аиваетс;я Е единичное
. 35
состояние нулевым сигналом fp а триггер 333 - сигналом с входа 48, формируемым только при стоящей планшайбе .
После перезаписи кода из счетчика 330 в счетчик 331 (обнуления сигнало оси проходящим с входа 50.4 через элемент И 337, триггера 332 и появления заднего фронта сигнала на С-вход счетчика 331) производится обнуление счетчика 330 и подготовка его к последующему циклу отсчета. Сигнал на установочный вход счетчика 330 проходит через элемент И 338 с входа 50.5 и представляет собой конъюнкцию сигналов fj,n и всп
Первьй импульс fj, (fи ) , поступающий на вход 218 (219), запрещает формирование сигнала Запись, поскольк проходит через элемент ИЛИ 341 на нулевой вход триггера 333. Таким образом, к началу движения объекта (планшайбы) в счетчике 331 обеспечивается наличие кода начального отсчета.
Блок 16 коррекции обкатного устройства (фиг. 15) служит для компенсации ошибок измерительного устройства 15, вызванных износом обкатного ролика датчика 18, допусками на изготовление ролика и измерительного пояска планшайбы и ошибок, вызванных разницей температур ролика и ппан- шайбы.
Для упрощения схемы компенсации v ошибок допуск на изготовление ролика должен быть со знаком -, а допуск на измерительный поясок планшайбы со
1
знаком +, что приводит к увеличени количества импульсов с выхода датчика, вырабатьшаемых за один оборот планшайбы, по отношению к требуемому 1 (например, 1 360000).
Перед началом позиционирования в режиме наладочного поворота НЛП осуществляется один полный оборот планшайбы, которому Соответствует два импульса кодовой привязки НИ1 (один импульс НИ2) планшайбы к выбранному угловому положению.
В интервале времени между двумя импульсами НИ1 счетчиком 221 осуществляется подсчет количества импульсов п, поступивших с обкатного измерительного устройства. Счетчики 221 - 224 являются двоично-десятичными де- зсадными счетчиками и могут быть выполнены на микросхемах К 155 ИЕб.Учи
м е Q
132540936
тывая, что количество лишних импульсов не превьш ает р (например, 1000), разрядность счетчика 221 выбирается равной 1 IgpC, и по окончании одного оборота планшайбы в счетчик 221 записывается разность
m п
п - 360000.
С приходом второго импульса НИ1 на вход 58 счетчик 221 обнуляется сигналом с выхода одновибратора 230. Перед этим осуществляется перезапись кода га из счетчика 221 в счетчик 222. Одновибратор 231 формирует короткий сигнал по переднему фронту иМпульса на входе 58, а одновибратор 230 - по заднему фронту этого импульса с задержкой, необходимой для надежного гп срабатывания счетчика 222. Формирователи 230 и 231 вьтолнены по известным интегральным микросхемам.
По полученной разности m вычисля5 ется коэффициент коррекции
К
(К
Кор
пор
1), который запоминается на
время очередного поворота планшайбы: m
К
Кор
1
360000 - m 360000
6
0
5
0
5
0
Узел коррекции состоит из счетчи- 1ка 224, счетчика 223 и узла 227 дешифрации.
В счетчике 224 формируется код коррекции, в счетчике 223 накапливаются импульсы f н f , поступакшц е с входов 60 и 61с Узел 227 дешифрации осуществляет коррекцию импульсных последовательностей f к f у в соответствии с кодом коррекции, записанньи в счетчике 224 и количеством импульсов, поступивйих в счетчик 223. Для этого он равномерно по мере углового перемещения планшайбы запрещает поступление п -1 импульсов на выходы 64 и 65.
Код с выхода счетчика 224 поступает на выход 66 блока 16 и далее через блок 8 коммутации на индикацию. Код коррекции в счетчик 224 может быть также занесен с выхода 2.5 блока 1 задания режима.
Делители 225 и 226, элементы И 228, ИЛИ 229 предназначены для управления формированием в счетчике 224 кода коррекции. При выбранных для примера величинах 1 , т, п счетчики 223 и 224 должны быть шестиразрядны- ми, т.е. иметь емкость 1000000, а де3713
лители 225 и 226 - коэффициенты деления 100 и 36.
Формирование кода коррекции в счетчике 224 осуществляется следующим образом. Импульсы высокой частоты,,
тупающиеся на вход 50„1 через открытый единичным сигналом с выхода элемента ИЛИ 229 на элемент И 228 (ка выходе элемента ИЛИ 229 единичны сигнал появляется после записи в счетчик 222 кода числа т), Лодаются на ВХОДЫ делителей 225 и 226. На счетный йход счетчика 222 проходит для рассматриваемого примера ка;адьй со- тый, а на счетный вход счетчика 224 - калодый тридцать шестой импульс появляющийся на выходе элемента И 228, После обнуления счетчика 222 на выходе элемента. ИЛИ 229 формируется нулевой сигнал,, который запреишет прохождение импульсов через элемент И 228 о К этому в счетчике 224 записывается код
1000000
too
° 36
НОСТИ и ,
пульсов f 1 и f.
Это соответствует то.чУ(, что на каждые 360000 импульсов на выход узла 227 дешифрации проходит 360000 - )г. импульсов,
Узел 227 дешифрации представляет собой комбинационную схемУ; которая формирует импульсные последовагель- при поступлении имОна может быть также Построена по декадному принципу„ содержать столько однотипных разрядов5 сколько разрядов имеется в счетчиках 223 и 224,, Выходы однотипных; разрядов собираются на элементе ИГК и стробируются сигналами f и ( на управляющих входах 60 и 61
Условия функционирования одного разряда узла 227 дешифрации: описыг а- ются следующей таблицей.
0. О О О О О О О О G О
10000000001
2 ooioo;OiOOO
Продолжение таблицы
О 1 О О О 1 О 0 1 1 О I О 1 О I О О
I О 1 О 1 6 О 1 111011100 111011101 111011110
1 1 1 13 1 1 1 I I
Выходной сигнал (здного разряда узла 227 корреккдии ога сывается следующей логической функ1.ц1ей
с е V е,, V е.Ч к,
(32)
е„ q,Q,(Q,Q,v Q,Q,Qi).,
е, qгQ1C L
е, q,Q, (., V Q jQ.Q j), (33) е, сц- (Q,Q., V С зОЛг).
где q, - Е ыходы десятичного разряда счетг ика 223 Qi Q выходы десятичного разря-
да счет :ика 224.
Условия формировс.ния сигнала перекоса из i-ro разряди, узла 227 дешифрации в (1-4-1)--й разряд счетчика 223 описьшаются следующей логической функцией
-о. -п -1-я ч
С
р%
причем
р - п р р
J- .-41 - Ч } - ч ., -ч , ..
Г) о Ч X
3 -, QrV p; Qi Q;- QJ f;;,
Q Q;- Q
(i 1, Гэ i: -- разрядность счетчика 223)
Таким образом, выходные сигналы f АЧ и: (выходы 64 F; 65) узла
227 депифрации описываются следующи- jviH логическими функциями:
ик
V i«i
f:.
(34)
V с,. f,, ,
i i
где с, - значение сигнала на выходе . i-ro разряда, вычисляемое по формулам (31), (32).
Датчик 17 нулевого положения шпинделя предназначен для выработки сигнала нулевой отметки углового положения планшайбы. В качестве датчика 17 может использоваться датчик ЦИ50 - 10000Н.
Датчик 18 угла поворота объекта служит для измерения углового положения планшайбы и может быть вьшолкен на основе датчика ЦИ50-10000 в совокупности с обкатным устройством, которое представляет, собой измерительный ролик, находящийся на валу датчика и обкатывающийся по измерительно- 25 лютных или инкрементальных размерах му пояску планшайбы.с помощью тумблеров 76.1 и 76.2; род
работы - подача (ДЦ) или позиционирование (ПВ) (с помощью тумблеров 76.3 и 76.4). Для. случая ПД код скорости S задается или тумблерным регистром 83 в режиме РВ или системой 91 в режимах АР и ПК. Если выбран род работы ПВ, отработка ведется с постоПрименение обкатного устройства для позиционирования планшайбы позволяет уменьшить дискретность позиционирования. Угол Поворота планшайбы о/ f,n определяется по формуле
30
о/п, dp- ---,
(35)
янно заданной скоростью, код которой формируется блоком 132 устройства Б управления скоростью.
где df - угол поворота обкатного ролика;
d. - диаметр ролика; D - диаметр обкатываемой поверхности измерительного пояса планшайбы.
Выбором соотношения диаметров d и D достигается требуемая дискретность измерения,
Датчики 19 исходного состояния объекта предназначены для контроля исходного состояния и проверки выполнения соответствующих блокировок. Они могут быть выполнены на основе реле, цепи питания которых коммутируются при наличии требуемого исходного состояния и блокировок.
Особенности алгоритмов работы системы в различных режимах.
Система может работать в следующих основных режимах.
Автоматический режим (АР), когда работа ведется от перфоленты с автоматическим переходом от кадра к кадру;
Режим покадрового считывания (ПК) с остановкой в конце выполнения каждого кадра.
Режимы АР и ПК задаются переключателями 79.1 и 79.2 блока 1 задания и реализуются под управлением системы 91 числового программного управления верхнего уровня. Б этом случае переключатель 87 переключается таким образом, что к выходам 29, 30, 32 - 35 подключаются выходы СЧПУ 91.
Режим ручного ввода (РВ), когда задание поступает с тумблерных реги- стров формирователя 2 программ. В режимах АР, ПК и РВ всегда задается: угол поворота 9(с помощью тумблерного регистра 82 в режиме РВ или системой 91 в режимах АР и ПК); знак за- данного угла поворота К 9 (с помощью тумблера 8 в режиме РВ или системой 91 в режимах АР и ПК); способ отсчета - абсолютный (ОА) или в приращениях (СИ), т.е. в абсо30
35
янно заданной скоростью, код которой формируется блоком 132 устройства Б управления скоростью.
Режим возврата в абсолютньй нуль, который задается либо тумблером 76.7 блока 1 или на выходе 33 системы 91.
Режим наладочного поворота (НЛП), который задается тумблером 76.5 и используется в частности, для определения значения коэффициента коррекции рбкатного устройства.
Режим непрерывного вращения (НВ), задаваемый тумблером 76.6. В этом режиме обеспечивается непрерывное вращение с заданной скоростью S от нажатия кнопки 89 Пуск до нажатия кнопки 90 Стоп в направлении, заданном тумблерами 78.1 и 78.2.
Режимы немерньк толчковых перемещений (НТП): быстрых со скоростью S (тумблер 77.3 блока 1); средних со скоростью dS (тумблер 77.2 блока 1), О oi : 1; медленных со скоростью (тумблер 77.1 блока 1), О /J : ci .
41
Режимы МТП, реал1 ;зуемьк; с помг1 дью тумблеров 77.4-77,9 блока 1 задания реткикэ-.
Для облегчения анализа работы системы и определения соответствия Еьгео дов и входов внутренних з.пементоЕ бл коп и устройств на некоторых фигурах в скобках указывается номер,, укалывающий, с каким элементом (или его лхо- дом, в л ходом) связан выход элемента данного блока.
Например, на фиг, 4 рядом с числом 99,1, соответствующим К входак триггеров 92 и 94 и входом кокмутато pa 92, в скобках указано число 76.2 Это означает, что сигнал на зход 99 блока 3 определения направления вращения поступает с выхода тумблера /6 блока 1 задания режима,
Технические преимущества яаявляе- мого объекта по отнопениго к известному состоят в обеспечении более высокой надежности функционирования и более широкой области применения. благ даря выигрьшу в достоверности функционирования, обеспечиваемому за счет организации оперативного контроля величины текущего угла поворота от базвого значения, соответствия его требуемому значению, орл аниза1дии опера-- тивного контроля недо:пусти1-юго персб га; выигрышу в средне; времени безотказной работы, достигаемому путем организации контроля исходного состс; янияЯ наличия необходимых блокировок, а также обеспечению возмохоюсти коррекции показаний датчика обкатного устройства в процессе эксплуатации без замены самого датчика,
Данная система для программного управления имеет более широкую об-- ласть применения благодаря paciimjje--- нию номенклатуры режимов функционирования (режимов управления переиещ - нием объекта) и обеспечению рсгис-:- рации и индикации текз щего угла поворота, углов поворота от абсолютного нуля к поворота в приращениях„
Формула и 3 о б р е т з н
1„ Система для программного ynpai-i- ления, содержащая фор1иирователь про;. - рамм, блок определения направления вращения объекта, арифметическое устройство, блок передачи кода упрапле- лия, блок синхронизации,, исполнительное устройство, бх;ок оегистрации,
ft 2
10
jt, 20
2Ь
30
35
0
5
О
мерительн(зе устройство, датч-ик нулевого положенил шпинделя,, датчик угла поворота объекта, причем вькод задания угла поворота объекта и первый выход задания режима формирователя nporpaMhs соединены соответственно с первым информационным и управляющими входами арифметического устройства, и}1формационньм выход которого соеди- с первыми ит формациопными входами блоков регистрации и блока определения направления вг)а пения объекта, пер- и второй выходы которого соедине- 4hi с первым и управляющими пходами блока передачи кода управления соответственно5 первый выход блока регистраг ии со« дмнен с первым ин- форман,ионным входом блока коммутации, первый и второй выходы блока синхронизации соединены с первым и вторым входами синхронизации арифметического устройства, информационные входы датчика нулевогсз положения шпинделя и датчика угла noBopo - a объекта являют- с-.я первьгм и ггорым «ходом системы, а их информационные выходы соединены с;оответстве1П1о с первым и вторым ин- формацио1 ными входами измерительного устройства, первый У второй управля- вьЕходы которого соединены с управляющими входами ,г;атчика нулевого положения шпинделя (-; датчика угла по- горота объекта cooTneTCTBeiiHOs о т - J . и ч а ю- щ в. я с я тем, чтод с це- ;if;io расц-лрения области применения и позьт ения надежности функционирова- ПИЯ, дополнительно содержит блок за- ,иа: ия режима, устрюйство упраЕшения скоростью устройство связи с приводом, блок индикации, блок пуска поворота, блок коррекции обкатного уст- .ройства, датчики исходного состояния объекта, причем -группа выходов режима блоков задания режима соединена с группами входов режимов блока определения } аправлекия вргщения объекта,, арифметического устройства, устройства управления скорос:тью и блока пуска поворота, первьп и второй выходы направления вра дения: соединены с первым и вторым управляющими входа- M-,i блока определения направления вра- щгния объекта соот:зетстве:нно5 первый и второй вьгходы которого соединены с :1 Г вь:м и вторым у1т;оавля1ощими входами устройства связи с приводом соответственно, первый выход блс Ка задания ))ежима соединен с ;зтэрьгм информационным входом арифметического устройства, управляющий вькод которого соединен с первым управляющим входом устройства управления скоростью, вто- рой выход соединен с первым управляющим входом формирователя программ, первьм выход группы управляющих выходов арифметического устройства соединен с первыми входами групп управ- ляющих входов блоков определения направления вращения объекта и блока регистрации второй и третий выходы группы управляющих выходов соединены с вторыми и третьими входами группы управляющих входов блока определения направления вращения объекта соответственно, четвертый выход группы управляющих выходов соединен с четвертым входом группы управляющих входов блока определения направления вращения и третьим управляющим входом устройства связи с приводом, пятый выход группы управляющих выходов соединен с вторым входом группы управляю- щих входов блока регистрации, выход управления индикацией блока задания режима, второй и третий выходы блока регистрации, выход кода коррекции обкатного устройства соединены с управ- ляющим и с вторым, третьим и четвертым информационными входами блока коммутации соответственно, выход которого соединен с входом блока индикации, группа выходов коррекции блока зада- ния режима соединена с группой информационных входов блока коррекции обкатного устройства, первый информационный выход которого соединен с первым информационным входом устройства связи с приводом и вторым информационным входом блока регистрации, второй информационный выход соединен с вторым информационным входом устройства связи с приводом и третьим информаци- онным входом блока регистрации, выход коррекции скорости блока задания режима соединен с первым информационным входом устройства управления скоростью, выход которого соединен с. третьим информационным входом арифметического устройства и третьим информационным входом устройства связи с приводом, первый и второй вькоды режима блока задания режима соёдине- ны соответственно с первым и вторым информационными входами формирователя программ, выход пуска которого соединен с входом пуска блока пуска поворота, первый выход режима формирователя программ соединен с входом режима блока определения направления вращения и первым входом режима блока пуска поворота, группа выходов которого соединена с группой управляющих входов устройства управления скоро- стью, выход знака формирователя программ соединен с вторым информационным входом блока определения направления вращения объекта, выходы останова и кода скорости соединены соответственно с входом останова и вторым информационным входом устройства управления скоростью, второй выход режима формирователя программ соединен с входом режима устройства управления скоростью и вторым входом режима блока пуска поворота, первый выход группы выходов которого соединен с первым управляющим входом блока регистрации и входом пуска арифметического устройства, второй выход соединен с ВТОРЫМИ управляющими входами блока регистрации и арифметического устройства, а также с третьим управ- лякщим входом блока определения направления вращения объекта, первый и второй выходы блока определения направления вращения объекта соединены соответственно с вторым и третьим управляющими входами блока регистрации, первый выход которого соединен с четвертым информационным входом арифметического устройства, первый информационный и управляющий выходы устройства связи с приводом соединены соответственно с информационным и третьим управляющим входами блока передачи кода управления, выход которого соединен с входами младших разрядов группы входов исполнительного устройства, а второй информационный выход устройства связи с приводом соединен с входами старших разрядов группы входов исполнительного устройства, первый выход группы выходов устройства связи с приводом соединен с вторым управляющим входом формирователя программ, второй выход блока передачи кода управления соединен с входом исполнительного устройства, с входа- .ми Конец обработки арифметического устройства и входами устройства уп равления скоростью и четвертым управ- лякЕцим входом блока передачи кода управления, третий выход которого соединен с третьими управляющими входаА5П
ми формирователя программ и измерительного устройства, первьд и информационные вьпсоды и перЕый выхс;д сигнала Нулевое положение блока передачи кода управления соединены со- .ответственно с первым и вторым HHCPOJ: - мационными и управля1а:1,им BJ:одами блока коррекции обкатного устройства, с третьего по десятый нькодь блока с. хронизации соединены соответственно с входом синхронизацир блока коррекции обкатного устройства,, с первРзцч и вторым В5:одами синхронизации устройства связи с приводом, первым, Еторык и третьим входами синхрониза1г,ии измерительного устройства; 1тервы и втот)ым входами синхронк1задик устройства управления скоростью, ЕОСЬМОК ВЬКОД
блока синхронизации соеди5 | ен такгге с третьим входом синх:ронизг;ции ус ; - ройства связи с приводом, третий вход системы соединен с входами датчиков исходного состояния объекта 5 группа выходов которых соединена с грЛ/ппой информационных входов блока пуска поворота выход нулевого положен;:;я датчика 1улевого положения 1ппи:нде,п.я со- единен с третьим информационны. - ; вхо-- дом измерительного устройства, второй выход нулевого по.поженк я KOTOI;O-- го соединен с 4eT.BepTtiM управяя-шдпч входом блока регистрации и .зтаг),1м уп- равляювтим входом устройсчта уттрал- ления СКОРОСТЬЮ:
2, Система по п., 1;. о г л : : ч :: иг- щ а я с я темд что бпок стуре слеичп направления вращезньт cojjei)- жкт комм% таторJ первый - четвептьй-; триггеры; первьп : и второй элементы И,, причем первый информационнь й вход блока определения направле ;ия зраще- 1ШЯ объекта соединен с входами пер- вого злемеита И,, к.о гор)го динен с информатхионны/ Г БХОРОМ псфго-- го триггера вькод которого соеди;ке1-; с первым инфopмa J юнп IM вxoдo : кокку- татора первый вход груг/пь; входов ре-жима блока опредсле т-тя калоавлени -: вращеьмя объекта соедкке -; с:: входоь; режима коммутатора и иуле. входа- ми первого и второг о триггера.; . которого соединен с вторьг информй онньп входом коммутатора5 второй -- шестой входы группы входов рржкма блока определения нап; авления праа.е-- Ш1Я объекта соединены соотг етствеинс С перЕ;ым входом второго элеме-ита И v. первцм - четвертьп : управля: Ш1И.М : ( Гс 5409-6
МП коммутй. J ne l BiDi и второй ныхо- .;:;; которого соединены с первыь и вторым выходами Е5лока определения направлг;ния в ращения п5ъе К : я,. первый - тре- 5
Tiiv i управляю; ;не вхс.дьц рход режима
г ервый - четверТ1,тй вг,:одь группр т управ- .гигющнх входов блока определения вап-- равления вра1Ц(;ник об-.екта сое..динены ,-, состветственнс с пу;тым - вось-чьм уп-U
равляю ци( в5:ода( к -;ммутатора, вто Р ык входом второго j.rief ieHTa И, инфор- мп ияонным вход,ом Е1- о 7огс триггера; нходами cHHxpoKH3SL H i третьего и четi вертого риггерор. в лходы которых со- е.цинены с третьим -- четвартьи Инфор- маи.ион.ным входами комм-утатора соот- витственно,, второй вход группы управ- .пр;ю11у- х вХ ОДов к второй информ.
Q иый вход блока опред.еления направлг- кия вр)а1цения :)бъекта соединены соот- :ii 7стве.нно с -гнфС р;пац 10Нньгт И .входами )-ретьего и чствертс гэ триггеров, выход второ-го эле;чен Г И соединен с
В вхсдам.и стгнхрониза.:,ии первого к второго триггеров,
3s CncTeNia ло и, i о т л и ч а го- щ .3 .л с я трл- Ц что арифметическое устройство содержкч- блок управления,
0 3;-(С К контроля, триггеров, пователи счперанда s; 15езультата,, реги- С пгы заданного пере .мещения и резуль- -i-a-i a, счетчик H/ nyjvbcoB „ суг маторз --i iicpaTop к.очс тантыз ком -гутатор зле ;-;i: V i Pi и элемент ИЛИ, гфичем первый :: горой и тре ;ч-ч икфо1 ма1дюннь й входы tiрифметичаск ого уса-ройства соединены соответс -гвекмо с хлйормационным вхо ::-:о1ч регистра перем д ения, с первым
1Г) инф ормацгтонньп-;: входо1 1 ко-ммутатора и -аервы м входом элемента И, выходы ко- {(jphix соединены соответственно с вто- р:-|- и} 1ф Ормацт-1оннь м входом коммутато ра. и.нформа;1 ( в содоГ формирова-
г -1 еля операнда и сч :т51ым входом счет- ,; первьш к 3 rovoi входы синхрони- -arjHn.; первьй и втсфой зходь; гр; Т1ПЫ П.КОДОВ режима арнфме :-ичес кого устрой- ,i neiiBbn вькол блока триггеров и
-.р ныход переполпкгнкя сум мзтэра соедине- П:- соств ;тст.;;:енно с ттервым и вторым г;ходами c:H;ixpf;;iHj3. первым.; вторым .: третьи:- ут1.к-. :Я-г. и инфобмациок- .i входами блоьй ч правлеьпм,, зьсходы
,:: упра 1 ля1оп1нх выходов которого ее-ед1 Пгешл с :;с5отве;: твующими входами .-. -;)уппы у1- :раБЛЯ ощих входов комг-гутато- т ;.ч . блока три1- .:-еро ;-,, блока контроля, L :;о .-лстс -;-.;уюп,ики Шгхопак- -; т руппы уп-
47132540948
равляющих входов арифметического уст- ростью соединены соответственно с ин- ройства, управляющими входами форми- формационными входами блоков коррек- рователей операнда и результата, вхо- .ции и задания скорости и входом режи- дом си1гхронизации и установочным вхо- ма блока задания скорости, выход кото- дом регистра результата, вход конца рого соединен с первым входом блока обработки, первый управляющий вход, сравнения, первый управляющий вход первый вход группы входов режима и устройства управления скоростью сое- вход пуска арифметического устройства динен с первым входом первого элемен- соединены соответственно с первого по ig та И и первьм управляющим входом фор- четвертый входами блока контроля, вы- мирователя задающих импульсов, второй (ХОД отказа которого соединен с первым управляющий вход соединен с вторым уп- информационным входом блока триггеров равляклцим входом формирователя задаю- .и является выходом отказа арифметичес- щих импульсов, выход которого являет- кого устройства, выход записи соеди- g ся выходом устройства управления ско- нен с первым управляющим входом блока ростью, первый вход синхронизации уст- триггеров, с соответствующим выходом ройства- управления скоростью соединен группы управляющих выходов арифмети- с входом первого счетчика, выход пе- ческого устройства и входом синхрони- реполнения которого соединен с вто- зации регистра заданного перемещения, 20 входом первого элемента И, выход выход генератора константы, четвер- блока сравнения соединен с третьим тый информационный и второй управля- входом первого элемента И, выход ко- ющий входы арифметического устройст- тррого соединен со счетньм входом ва соединены соответственно с третьим второго счетчика импульсов, выход - и четвертым информационньп входами 25 второго счетчика соединен с вторым коммутатора и вторым управляющим вхо- входом блока сравнения и информацион- дом блока триггеров, второй,третий и ным входом блока умножения, выход ко- четвертый выходы которого соединены торого соединен с первым входом вто- соответственно с установочным входом рого элемента И, входом синхрониза- и входом синхронизации счетчика, а зо блока задания мерных перемещений также с управляющим выходом арифмети- и Первым информационным входом форми- ческого устройства, выходы формирова- рователя задающих импульсов, соответ- теля операнда и регистра результата ствующие входы группы входов режима соединены соответственно с первым и устройства управления скоростью сое- вторым входами сумматора, информаци- динены с входами групп входов режима онный выход которого соединен с ин- блока задания скорости, блока задания формационным входом формирователя мерных перемещений и формирователя за- .результата, первый выход формировате- дающих импульсов, а также с аервым и ля результата соединен с информаци- вторым входами элемента ИЛИ,выход ко- онным входом регистра результата, о соединен с вторым входом вто- второй выход соединен с информаци- рого элемента И, выход второго эле- онным выходом арифметического устрой- мента И соединен с входом синхрониза- ства и информационным входом счетчи- Ции блока коррекции скорости, выход ка импульсов, выходы которого соеди- которого соединен с вторым информаци- нены с входами элемента ИЛИ, выход д онным входом формирователя задающих элемента ИЛИ соединен с вторым входом импульсов, второй вход синхронизации элемента И и вторым информационным устройства управления скоростью сое- входом блока триггеров.динен с входом синхронизации блока
4, Система по п. 1, отличаю- умножения, вход конца обработки сое- щ а я с я тем, что устройство управ- Q динен с установочным входом второго ления скоростью содержит блок умноже- счетчика, группа управляющих входов ВИЯ, блок задания мерных перемещений, соединена с группой управлякадих вхо- формирователь задающих импульсов, блок дов формирователя задающих импульсов, коррекции скорости и задания скорое- первый вход группы управляющих вхо- ти, первый и второй счетчики импуль- gg дов соединен с входом пуска блока сов, блок сравнения, первый и второй задания мерных перемещений, вход ос- элементы И, элемент ИЛИ, причем пер-, танова соединен с входами останова вый и второй информационные входы и формирователя задающих импульсов и вход режима устройства управления ско- блока задания мерных перемещений, вы49
ход которого соединег с третьим информационным входом фпрмироватрля за- дакщик импульсов.
5, Система по п, 1 о т л и ч а- ю щ а я с я тем, что устройство связи с приводом содержит первый - чет- вер тьй блоки умножения частоты, блов эадерл;ки, блок деи ифрации5, блок синхронизации, блок коммутации, счетчик рассогласования и результата; перный , и второй коммутаторь, причем первьй - третий управляюпгие входы устройстБ;а связи с приводом соединены соответственно с первым и вторым управляЮ1ци н: BXCA aNM блока кoмmтa J,ии и управляющим входом блока дешифрации, nepBbrii шестой выходы которого соединень; соответственно с упра.вл. тющим выходрк. первым и вторым выходами группы вьссс- - дов устройства связи с приводок.;Ттср- - третьим управляющими входами первого и второго комн утаторов, пер- ;вый - третий информационньге вхс ды и первый - третий входь сияхронкз ацик устройства связи с приводом соед лнен :. соответственно с первым третг им формационными входами, первым и гзто- рым входами синхронизации блока за- держкИр выход которого соедчнер: с третьим выходом группы выходов устроит ства связи с приводом, первый - третий выходы блока синхронизаид-п-т соед ----- иены соответственно с первым - третьим информациоины(м Е ходам5 блока коммутации первый выход которого соединен с входо м счетчика рассогласованияэ счетными зходггми первого и второго блоков умножения час- тоты и первым информационным входом первого коммутатора, второй выход соединен с вьгчитаюп 1м входом счетчика рассогласования, счетньЕми входами третьего и четвертого блоков умножения частоты и nepBbiM информагьионнкм входом второго комлмутатора, третлЧй выход блока дешифрации соединен с управляющим входом блока задержки и установочным входом счетчика результата выходы младших и старп:их paspHJioa которого соединены соответст:вр.нно с первым и вторым информационныт. ;и тгогходами устройства связи с приводом; седьмой выход блока дешифрации соеди-неи с усг- тановочными входами п(: рвого - четвертого блоков умножения частоть;, вьхс;- ды которых соединены с вторым и третьим информационными входами первсгс и вторым и третьим информационными
409
пходамк второг о К(5 ; Г тлтороп, выхолы ie:pBoro и BTfjpcro ког- мутатороБ соеди- 1-ены cooTiseTC,прение г сукчипующиг- и вьгчитакядим входами с -:е гчи;ка резуль- то.та.
6,, Системе ;, по п, , о т л и ч а ю- ш, а я с я тем,, что блок регистрации содержит рег нстрь; абсолютного положе- -|g пня и текущего yiMiK поворота, счетчи- кн абсолютного положения н приращения, первый и иторс Й ко мутаторь. ::ричем первый икформациот-шый пход,, ггервый и второй вхс ДМ 1 руппы управля|с кя.чих входов блока регис7 рации еоеди- нень соответс.твеннС с; информаиионньпч 35-;одон регистра renyiiero угла поворота и входами синхронизации регистров текущего угла поворота и абсолютного
Q пс Ложения, которых являются
первым и зторы пьгходами блока регист- 1 М МИ соответственно, первый управля- киаий блока рег исграции соединен L устаноиС Чньгт Г вхо;:ок счетчика прира/5 |дения, выход, которого является третьим выходок блока регистрации, второй уттравляю ций вход блока регистра- ци;- соед1-п-;ен с; первыми управляющими входами nepBoi o и Е;торого KONff-iyTaToГ С выходы которьк соединены с сум- ;Т1 уго 1 ,им и вычитаюгп.и.м входами счетчика прк;рао;ени)ч соотгетственно третий упра зляюци вход б-;ока регистрации г. лгдинен с вторыми управляющими вхо-
,jj.. ,;f-:iMTi первого и BToi- o: o коммутатороЕ, и гверть1й упрг1зляющий вход соединен ; установочкы ;зхо,:;,ом счетчика абсо- .улотного положения, второй информаци- о1;ньш вход соедикеи с первыми инфор..г| laциoкlIыми вхсздами первого и второ- ком утатО ров и сумкирующим входом сч:етчика абсолютког о положения, тре- гмй информационный вход соединен с BToptjMi иг1формациоииыми входами пер,,5г вого и второго коммутаторов и Бычи- т;1юии-1м входом счетчика абсолютного положении,, которого соединен -; информ ционным регистра аб- сс лютного r(OJ :o KeHMsi ,
rf, 7„ Систем;; по п, , о т л и ч а ю щ а я с я тем что блок коррекции обкатного у с тг) о и г: ТВ а содержит первый -; второй счетчики начального положа- п1-(я, счетчик ;: импульсов и задания,
гс рвый и втогоГ делители частоты, упел де1 гифра : ги,, элемент И; элемент n.iCi, перный и второй одновибраторы, тгатчем у;:-;рлвл: Ю дий вход блока коррек- :;;-:и обкат иого устрсй( тва соединен с
51
установочным входом счетчика импульсов, через первый одновибратор - с установочным входом первого счетчика начального положения, а через второй одновибратор - с входом синхронизации второго счетчика начального
с первым информационным входом узла дешифрации, информационным входом второго счетчика начального положения и входами элемента ИЛИ соответственно, первый информационный вход блока коррекции обкатного устройства соединен с суммируюсцими входами nep-t вого счетчика начального положения и счетчика импульсов, а также с первым управляющим входом узла дешифрации, первьм и второй выходы которого являются первым и вторым информационными выходами блока коррекции обкатного устройства, второй информационный вход блока коррекции обкатного устройства соединен с вычитающим входом счетчика импульсов и вторым управляющим входом узла дешифрации, вход синхронизации соединен с первым входом элемента И, вход кода коррекции и вход записи группы информационных входов соединены соответственно с информационным входом и входом синхронизации счетчика задания, выход которого соединен с вторым информационным входом узла дешифрации и является
выходом кода коррекции обкатного уст- 5 ход которого соединен с входом син45
ройства, выход элемента ИЛИ соединен с вторым входом элемента И, выход которого соединен с входами первого и второго делителей частоты, выходы первого и второго делителей частоты сое- Q динены со счетными входами второго счетчика начального положения и счетчика задания соответственно.
8, Система по пп, 1-3, отличающаяся тем, что блок управления арифметического устройства содержит регистр сдвига, коммутатор, элемент И и одновибратор, причем пер- вьй - третий управляющие входы, первый и второй входы синхронизации блока управления соединены соответственно с первым - третьим управляющими входами и входом синхронизации коммутатора и входом синхронизации регистра сдвига, первый - четвертый выходы gg соединены с первьм - четвертым информационными входами коммутатора, информационный вход блока управления и инверсный выход одновибратора соеди50
хронизации второго триггера, единичный выход второго триггера соединен с выходом отказа блока контроля, вто рым входом элемента ИЛИ и инверсным входом первого элемента И, четвертый вход блока контроля соединен с вторым входом первого элемента И и ин- версным входом второго элемента И.
10. Система по пп. 1-3, отличающаяся тем, что формирователь операнда арифметического устройства содержит преобразователь дво ично-десятичного кода в код с избытком три и коммутатор, причем ийфор- мационный вход формирователя операнда соединен с входом преобразователя двоично-десятичного кода в код с избытком три, выход которого соединен с информационным входом коммутатора, управляющий вход формирователя операнда соединен с управляющим входом коммутатора, выход которого является выходом формирователя операнда.
52
немы соответственно с первым и вторым входами элемента И, выход которого соединен с четвертым управляющим входом коммутатора и является первым выходом группы выходов блока управления, nepsbrfj выход регистра сдвига соединен с входом одновибратора, прямой выход которого соединен с вторым выходом группы выходов блока управления, первый - одиннадцатый выходы коммутатора являются третьим - тринадцатым выходами группы выходов блока управления соответственно.
9, Система по пп, 1-3, отличающаяся тем, что блок контроля арифметического устройства содержит первый и второй триггеры, первьй - третий элементы И, элемент ИЛИ и одновибратор, причем первый вход блока контроля соединен с первыми входами первого и второго элементов И, выходы которых соединены с единичным входом первого триггера и первым входом
элемента ИЛИ, быход элемента ИЛИ соединен с нулевым входом первого триггера, выход которого через одновиб- ратор соединен с выходом записи бло- ка контроля, первьм и второй входы
группы управляющих входов, второй и третий входы блока контроля соединены соответственно с информационным входом второго триггера, первым - третьим входами третьего элемента И, вы-
5
Q
g
0
хронизации второго триггера, единичный выход второго триггера соединен с выходом отказа блока контроля, вторым входом элемента ИЛИ и инверсным входом первого элемента И, четвертый вход блока контроля соединен с вторым входом первого элемента И и ин- версным входом второго элемента И.
10. Система по пп. 1-3, отличающаяся тем, что формирователь операнда арифметического устройства содержит преобразователь двоично-десятичного кода в код с избытком три и коммутатор, причем ийфор- мационный вход формирователя операнда соединен с входом преобразователя двоично-десятичного кода в код с избытком три, выход которого соединен с информационным входом коммутатора, управляющий вход формирователя операнда соединен с управляющим входом коммутатора, выход которого является выходом формирователя операнда.
53П25АО
11,Система по пп, 1-3, о т л и- чающаяся теМ;, что формирователь результата арифметического устройства: содержит преобразователь ко- . да с избытком три в двоичный код и
коммутатор, причем ииформационньп упраиляющий входы формироиателя результата соединены сэответстве шо с. информационным и управляющими входа-- - Q ми коммутатора, выхс.гд которого является первым выходом формирователя результата и соединен :; входом преобразователя кода с избытком три в двоичный , выход которэго является вто- -J5 рым выходом формирователя: результата ,
12,Система :по пп, , о т л и - чающаяся тем, что блок зггда- ния мерных перемещений устройства п-- равл€ .ния скоростью содержит первый - 2о пятьй счетчики, первый и второй триг- герЫд первый и второй ком утаторы5 элемент И, причем первый - седьмой входы группы входов режима блока задания мерных перемещений соединены со- 75 ответственно с первьгм управляющим входом первого коммутатора и первь г - шестым управляющими входами втогюг о коммутатора, выход которого соеднп1:;.н
с первым информационным входом пефЕО- зо го коммутатора,, вход1э1 пуска и остзлсо-- ва блока задания мерных переме1цет;и: : -: и нулевые выходь пер:зого и второ1 о три:ггеров соединены соот:о:етстг. ; вторым и третьим упр.авляюшими, вторым . и третьим информа.цио 1ныь и вхо.гичми первого комм татора5, пер:в-ый вьжод которого соединен с единичными Е1Хо|„ами первого и второго тр--::ггеров, второй и третий выходы. соед; ;нены с нулвЕ.ыми Q входами первого и второго тригг ероя соответственно,, ед,ин1- :чнь0Ч- выход Б-ТС- рого триггера и вход синхронизации блока, задания мерных перемещек й соединены соответственно с первым к д,: вторкм входа ми элеме:и:та И выход которого является выходок блока пере- мещений и соединен с первы:м инфcp a- ipiOHHbw входом второго коммутатора и счетным входом ,, - выход переполнения i-ro счетчика ее- единен с (i-f-l)-M инфсрмаи.иоьпи-лм ЕХС- ом второго коммутатора и сче;гнп0 -: входом (i-f-l)-ro счетчика (i,)} нь1- од переполнения пятого счетчика со- ,. единен с шестым информационньм в:хо- ом второго коммутатора.
. 13. Система по пп, 1-4, о т л и - чающаяся тем. что формирсва.ф з .Ч 1 ъ--:
г п в к 1-: д с г; м в с .: т
5.
тель задающих имп /.чьсов устройства упраг ления скарос ью со/,ерясит коммутатор, первый и в :-орой триггеры, первый и второй элемерггы причем первый - третий информационные входы .формирователя зада-ю цих импульсов сое;1инены соответстнс нио с первым - третьим информа.цисннгьми входами коммута- TOpaj, выход :котор(зго является выхо- ;iOM формиро1з.г,теля задающих импульсов первый яход группы управляюптпх входов фсф1чиро1зания задающих имлульсов соединен с первым уиравляктшим входом . :кг1ммутатора и; единичными входами пер- ::зого и иторо:го триггеров выходы которых соединены с вторым и третьим уг:равляющим1.{ входг1ми коммутатора : зторой чет: ертьй входы группы управляющих входов S и второй управ- ля кндие входы формирователя задающих 1тмпульсов соединены соответственно с четвертым - седьмым управляюгцими вхо- гтами коммутатора н первым входом пер пего элемента ИЛИ, выход которого со- с динен с нулевым входом первого трих- гера, вход о :ганова формирователя за- импу/п-сов с:оед,инен с вторым пходом nepBoi o эл :мента ИЛИ и нулевым входом второго триггера, первый - пя- .ЧУЙ входы группы входов режима формирователя задающих импульсов соедине- };ы соотиетственно с первым - третьим гьчодами втсрсзго элемента. ИЛИ, восьмым и девятым управляки1р-1 ч и входами комму атора, выход втогого элемента ИЛИ со 1 ътинен с десятым правля1ош;ям входом :--:оммутатора „
Система г;о пп, 1-4, о т л и - г а ю щ я я с; я leN;, что блок задания скорости устройства управления скоростью сс1держ.ит коммутатор, пер- р.ый - четвертый генераторы констант, первый - олементь И, причем информа1ционнь й вхсд блока задания скорости, вьгхо;;,ы первого - четвертого г енератс)ра констант сое.д:лне.ны соответственно с первь м - п.ятым информа- ционны -о-:: вхсг,ам:и коммутатора, выход которого явля:ется выходо б..пока зада- 1-:ия скорости 5 первьгй - четвертый входы группы ВХО.ЦОВ режима Злока задания скорости сосдииень; соответстйенно с г;ервым и вторым входами первого элемента i-ШИ; ) и вторым входами второго элеке:пта ИЛР , которых с о-злиг ены соответственно с первьгм и .:т:)рым управляю1,ими входами коммутатора, пятый - гринадп, входы группы входов режима и вход режима блока задания скорости соединены соответственно с третьим и четвертым управля- юв;ими входами коммутатора, первым - восьмым входами третьего элемента ИЛИ, выход которого является пятым управляющим входом . коммутатора.
15. Система по пп. 1-9, отличающаяся тем, что блок сигна- ,Q лов датчика измерительного устройства содержит узел сравнения фаз, узел выработки импульсов, делитель часпервого счетчика и нулевым входом первого триггера, второй вход синхро- .низации блока нулевого положения соединен с nepBoLM входом четвертого элемента И,выход которого соединен с установочным входом первого счетчика, третий вход синхронизации блока нулевого положения соединен с вторым входом узла сравнения фаз, инверсными входами первого и второго элементов И, вторь ми входами третьего и четвертого элементов И, первым входом пятого элемента И и единичным входом втототы, узел питания датчика, фильтр и формирователь, причем информационный 15 Рого триггера, выход которого соеди- вход блока сигналов датчика через по- ней с вторым входом второго триггера, следовательно соединенные фильтр и формирователь соединен с первым входом уэла сравнения фаз, первый и втовыход которого соединен с вторым входом пятого элемента И, управляющий ВХОД, первьй и второй информационные
рой выходы которого соединены соот 20 входы блока нулевого положения со- ветственно с первым и вторым информационными входами узла вьфаботки импульсов, первьй и ВТОРОЙ входы синхронизации блока сигналов датчика соединены соответственно с первым и вторым входами синхронизации узла выработки импульсов, первый выход которого через делитель частоты и узел питания датчика соединен с управляединены соответственно с единичным входом второго триггера, суммир п-эщи и. вычитающим входами второго счетчи ка, выход переполнения которого сое 25 динен с входом третьего триггера и первыми входами шестого и седьмого элементов И, выход элемента ИЛИ сое динен с нулевым входом второго триг гера, выход которого соединен с тре
ющим выходом блока сигналов датчика., 30 тьим входом пятого элемента И, выходы
третий вход синхронизации блока сигналов датчика соединен с вторым входом узла сравнения фаз и третьим входом синхронизации узла выработки импульсов, второй и третий выходы кото- 35 ционный вход блока нулевого положе- рого, а также выход формирователя со- ния соединен с вторыми входами седь- единены соответственно с первым - мого и шестого элементов И, выход ко- .третьим информационными выходами бло- торого является первым выходом блока ка сигналов датчика.нулевого положения, выход третьего
16. Система по пп. 1-9, о т л и - 40 триггера соединен с третьим входом
чающаяся тем, что блок нулевого положения измерительного устройства содержит узел сравнения фаз первый и второй счетчики импульсов, пер- вьй - третий триггеры, первый - седь- мой элементы И, элемент ИЛИ, причем первый - третий информационные входы блока нулевого положения соединены соответственно с первым и вторым входами элемента ИЛИ и первь1м входом узла сравнения фаз, первый и второй выходы которого соединены с первыми входами первого и второго элементов Й,первь1й вход синхронизации блока нулевого положения соединен с вторыми входами первого и второго элементов И и первым входом третьего элемента И, выходы которых соединены соответственно с суммирующим и.вычитающим входами
первого счетчика и нулевым входом первого триггера, второй вход синхро- .низации блока нулевого положения соединен с nepBoLM входом четвертого элемента И,выход которого соединен с установочным входом первого счетчика, третий вход синхронизации блока нулевого положения соединен с вторым входом узла сравнения фаз, инверсными входами первого и второго элементов И, вторь ми входами третьего и четвертого элементов И, первым входом пятого элемента И и единичным входом втоРого триггера, выход которого соеди- ней с вторым входом второго триггера,
Рого триггера, выход которого соеди- ней с вторым входом второго триггера,
выход которого соединен с вторым входом пятого элемента И, управляющий ВХОД, первьй и второй информационные
входы блока нулевого положения со-
единены соответственно с единичным входом второго триггера, суммир п-эщим и. вычитающим входами второго счетчика, выход переполнения которого сое- динен с входом третьего триггера и первыми входами шестого и седьмого элементов И, выход элемента ИЛИ соединен с нулевым входом второго триггера, выход которого соединен с трепятого элемента И и первого счетчика соединены соотвественно с входом синхронизации и информационным входом второго счетчика, четвертый информа5Q
седьмого элемента И, выход которого является вторым выходом блока нулевого положения.
17. Система по пп. 1, 9 и 15, отличающаяся тем, что узел выработки импульсов блока сигналов датчика содержит первьш - третий триггеры, первый - седьмой элементы И, первый и второй элементы ИЖ, первый и второй одновибраторы, причем нулевой и единичный выходы первого триггера соединены соответственно с пер-, выми входами первых элементов ИЛИ и И, выходы которых являются первым и вторым выходами узла выработки импульсов, первый вход синхронизации узла выработки импульсов соединен с вторым входом первого элемента И,пер-
57I325
вым инверсным входом элемента И и лер- вым входом третьего элемента И,, выход которого соединен с первым вхо-- дом второго элемента ИЛИ второй вход ,. синхронизации узла выработки импульсов соединен с первьсми входами четвертого и пятого элементов И, выходы которых соединены соо светстзенно с еди- ничньлм входом первого триггера и тре-- IQ тьйм выходом узла вьфаботки импульсов, выход пятого элемента И соединен с вторьЫ инверсным ;зходом второго элемента И, вьсход которого соединен с вторым входом первого элемента ИЛИ, ts третий вход синхронизации узла выработки импульсов соединен с нулевыми входами первого и в 1 орого т эиггеров,, инверсным входом шестого элемента И, ,а через первый одновибратор - с ий- 20
0958
версным входом третьего элемента И и прямььм входом седьмого 1лемента И, выход, которого соединен с единичным входом третьего триггера, выход второго триггера соединен с вторым входом четвертого элемента И, первый информационный вход узла выработки им- |пульсов соединен с вторым входом третьего элемента И, второй информацион- вход соединен с вторым входом
второго элемента ЯПИ, инверсным входом седьмого элемента И,, а через второй одиовибратор - с прямым входом шестого элемента И, выход которого соединен с единичным входом второго триггера, выход второго элемента ИЛИ соединен с нулевым входом третьего триггера, вькод которог(з соединен с вторым входом пятого элемента И,













| название | год | авторы | номер документа |
|---|---|---|---|
| Микропрограммное устройство управления с контролем | 1983 |
|
SU1142832A1 |
| Система для контроля и управления | 1985 |
|
SU1273932A1 |
| Устройство для программного управления | 1984 |
|
SU1198461A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ НАРАБОТКИ НА ПОЛНЫЙ ОТКАЗ СТРУКТУРНО-СЛОЖНОЙ СИСТЕМЫ | 1992 |
|
RU2041493C1 |
| Система для контроля и управления | 1985 |
|
SU1270767A1 |
| Система для отладки программ | 1987 |
|
SU1481774A1 |
| Устройство для программного управления | 1987 |
|
SU1432461A1 |
| Устройство для контроля | 1985 |
|
SU1293739A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1130864A1 |
| Устройство для формирования спектров с постоянным относительным разрешением по направлениям | 1984 |
|
SU1229775A1 |
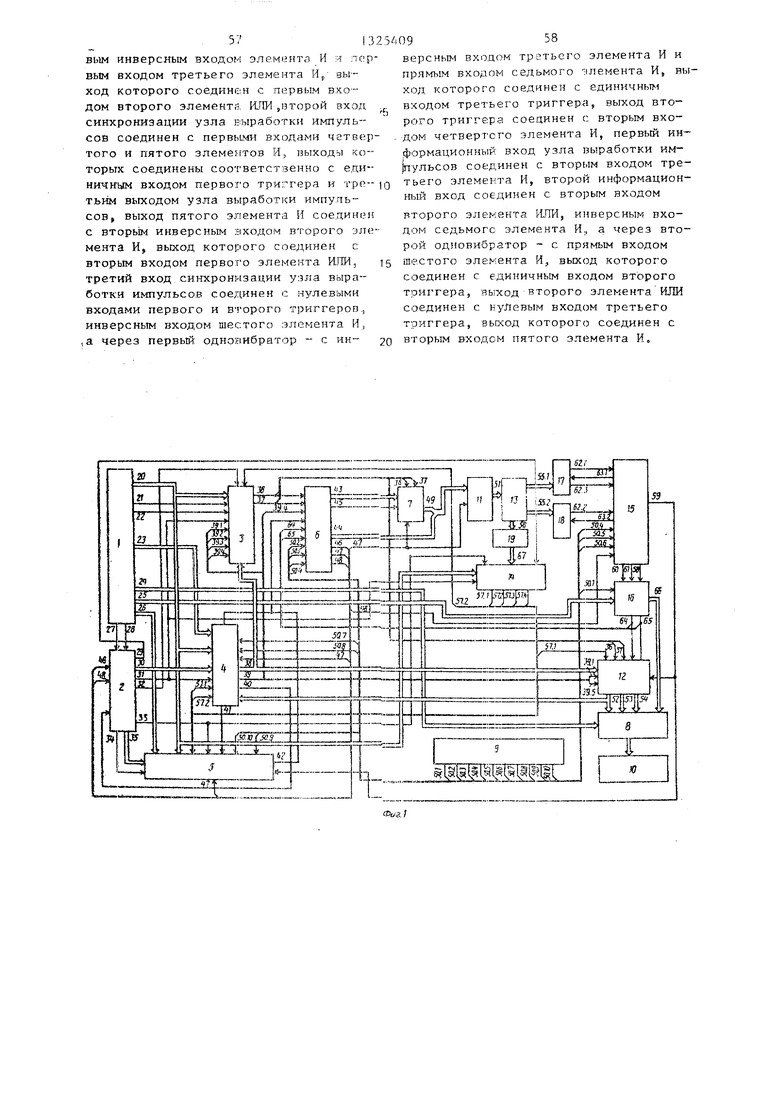





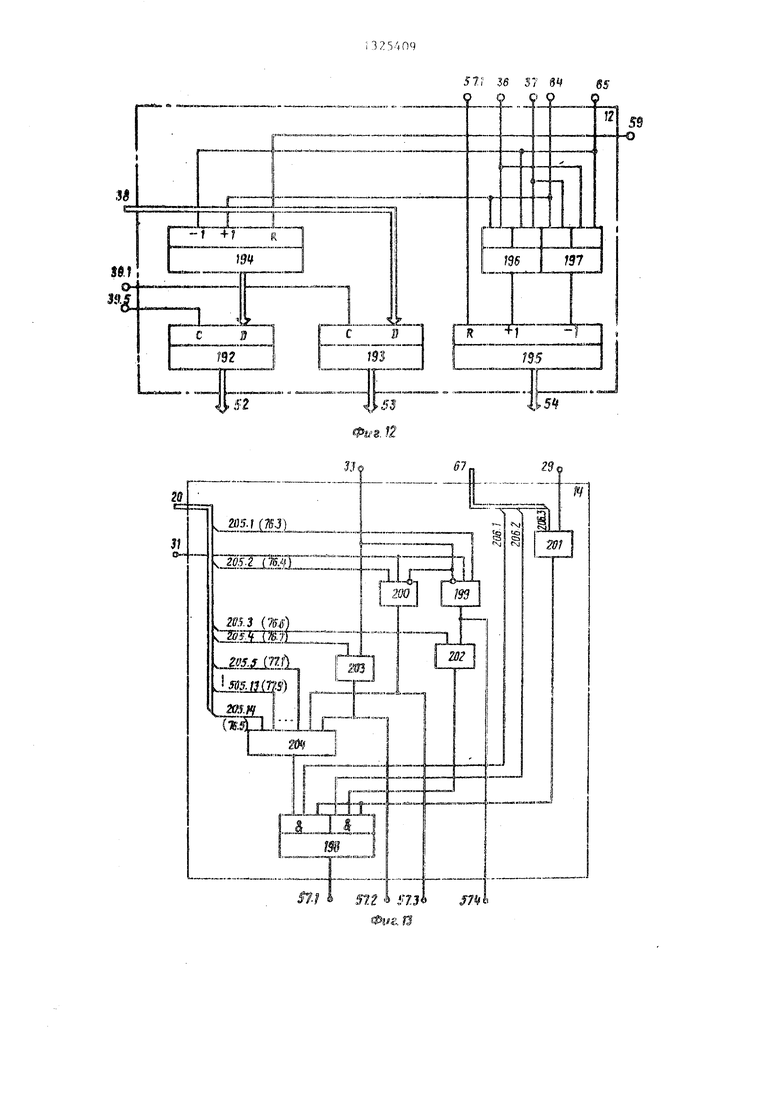









Изобретение относится к автома-- тике и вычислительной технике и может быть использовано в системах для числового прогр.аммного управления бочими и установочными перемещениями планшайбы специальных тяжелых токарных станков с заданной скоростью, а также для позиционирования планшайбы карусельных станков и поворотных столов координатно-расточных, сверлильных и фрезерных станков. Цель изобретения - повыше-ние надежности функционирования системы и расширение .области применения. Отличительными особенностями являются: обеспечение плавного разгона привода до заданной скорости S и осущаствлениа с этой скоростью заданного перемещения; осуществление перемещения с постоянными фиксированными скоростями в различных peжнмax организация выполнения группы режимов толчковых: перемеш,ений с заданньш шагом обеспечен ие непрерывного вращения с заданной скоростью и вьтолне- ние наладочного поворота для определения коэффициента коррекции обкатного устройства; организация в целях повьшения надежности и безопасности функционирования контроля величин перебега, текущего угла поворота от базового значения, требуемого исходного состояния объекта перед началом его перемещения, а также оперативного отображения информации о значении основных параметров. 16 з.п. ф-лы, 1 табл., 36. ил.
п
4в
12
к
S7.f.
zi
Е
ММ-С
2t
3t
г
Xj
я
за
-т
32
95 I
1LJ
J
Узя
Фил If
ФЛ.3
с, го
1325409
J.7 О W О JJ р9 .VrUftQ , ifl 9
«i
0 О
I
5
5 ОnL...
5
f)ff
SlL:
IMMMMt-ll-tl-tt-l - It-ll-lt-l- |1-||-|ММММ1-1
III I I «I
t I I
I I - II I I
Фи,г.Ю
Фиги&I 61 58
n f.t С о9
ffiiO 6 If3
ll
ч - л. «,.М1-.
«1
:L
рО гзз 1 I-f-I 1-,,-J
Chilhoxa ТЮ
Г1
от.ч т
.J L
ъОт
Г
пПЧ )ПЗЗ
т}
О-1
255
Е
25S
Ф
Фм.20
I
.J
рI 258
4
-WT
259
2$7.7
LfiJ
i
33
.m M
f57.ri
,
hf
„|W.ft
Фи.21
Фиг. К
-J - Ha :S
(Риг. IS
160 О
.7
г:
567
308
ФилЯ
(МW7
k-)
OFF
Г
Тс X
307
Х L
4в
Фи9.27
Фиг.г9
Kf
«
Нг Из
)
ffit
г/ 213
22
й/а. 3f
39
S9 -о
5
П.1
ФилЗЗ
Фиг.Ч
о- to & 54 S4 Щ
Ъ g Si g Ъ Ь Ъ и k
«« tQ trirr e4;P4t ciJ j
eS
eS
«M
Режим ЛТ ОРежим
Фиг.36
Редактор Н, Рогулич
Составитель В. Харченко
Техред л.Сердюкова Корректор И. Муска
Закйз 3106/41Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам нагобретений и открытий 113035, Москва Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4




| Самомонтирующийся козловой кран | 1974 |
|
SU516619A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программное задающее устройство | 1979 |
|
SU824145A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| „Патент США № 4109185, кл, 318-571, 1978 | |||
| Электрохимический индикатор | 1987 |
|
SU1531179A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР № 913337, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
