Изобретение относится к транспортным средствам, в частности к механизму их ворота, и может быть иснользовано для повышения маневренности специализированных транснортных средств, применяемых в стесненных услоЕ иях, например самоходных маиинуляторов.
Це.л .-ю 113обретеиия является улуч111сние мансврсмпиюти манипулятора.
На фиг. 1 показана гидрскииематиче- ская схема механизма поворота самоходного манипулятора; ка фиг. 2 -- принципиальная электрическая схема управления механизмом поворота; на фиг. 3 и 4 - схемы соединения поворотных валов со звездочками нри помощи муфт; на фиг. 5 - кинематическая схема связи поворотных валов при HOMOHiH двух пепных передач, в аксонометрии; па фиг. 6-- 8 - г арианты маневрирования самоходного мапипу.. 1ятора в стесненных условиях.
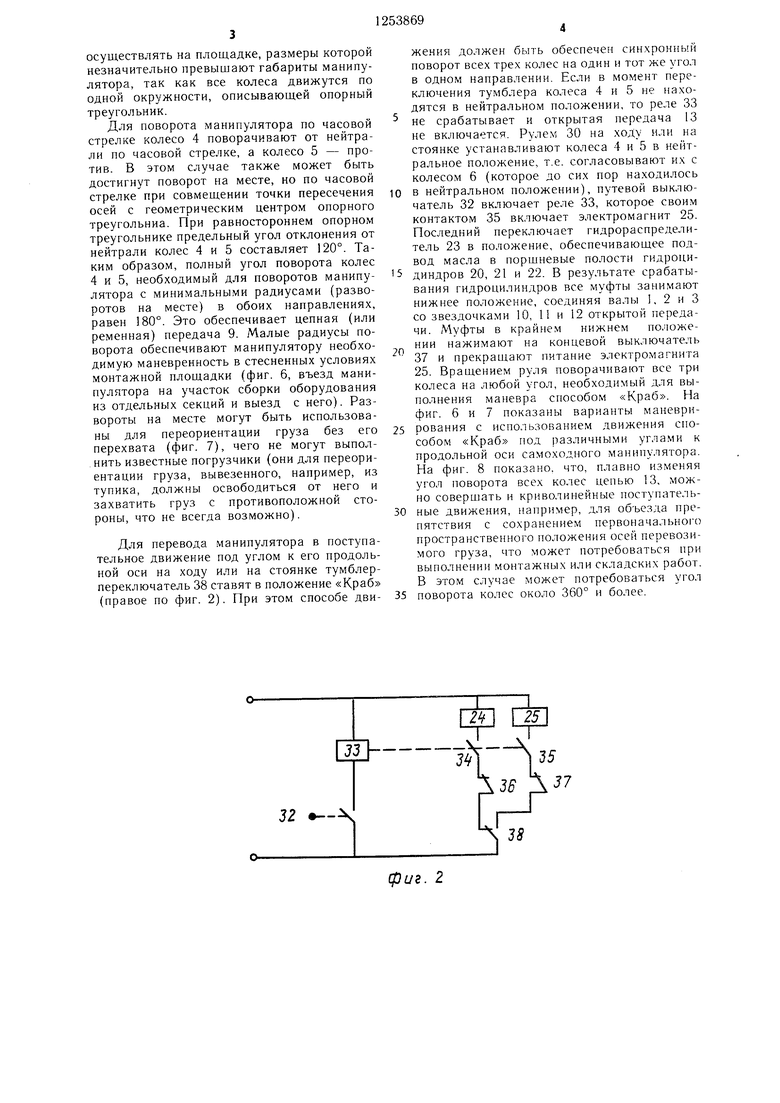
А ехапиз -1 поворота самоходного манипулятора содер/к Г - три поворотных вертикальных вала 1, 2 и 3, онираюпгиеся на ходовые ко/|::ч-.;-; 4, 5 и 6. Сверху на валах 1 и 2 установлены звездочки (или шкивы) 7 и 8, связанные между собой нерекрестно 1-покС й сиязыо. иап) цепью или зубча- 1-ым pevit e i 9, а сакже звездочки (|пкпвы|
10и it, :;оторыс: совместио с установ- леппой lia iui.iiy 3 звездочкой (шкивом) 12 oxBa -iciHj HtMibio (ремнем) .3 (открытая передача). Вал i снабжен управляемой .муфтой 14, naiip Uviep кулачковой. В верхнем и нижнем положениях муфта своими кулачками может взаимодействовать с кулачками звездочек 7 и 0. Подобная му1{)та 5 установлена на валу 2 между звездочками 8 и
11(фиг. 3). На валу 3 установлена муфта 16 (фиг. 4), которая в верхнем положении сцепляется с рычагом 17, зафиксированным относительно рамы 18 самоходного манипулятора, а в нижнем - со звездочкой 12. Муфты связаны двуплечими рычагами 19 с гидроцилиплфами 20, 21 и 22, рабочая жидкость к которым подается через трехпози- ционный гидрораспределитель 23 с управлением от двух электромагнитов 24 и 25 (фиг. l). Вал имеет привод в виде низкооборот- пог о (вьк окомоментного) гидромотора 26 е реверсивным потоком, соединенного магистралями через трехпозиционны.и гидрораспределитель 27 рулевого .мехапизма с насосом 28 и гидробаком 29. Гидрораспре;1,е, 1ите;1ь 27 связан с рулем 30, уст;1Н01злепным на пульте 3 управления в каСитие самохо.- ного мани 1улятора. Вал i :H dCi/Kcn датчиком нейтрального положения колеса 4 -- путевым выключателем 32, который расположен в цепи обмотки )еле 33 с двумя за- мь5каюи1ими контак ; а ли 34 и 35. Эги контакты )а:;мегцеиы в пени питания электромагнитов 24 и 25. На муфтах установлены концевые выключател л с )азмыкаюп1имч контактами 36 и 37, кото; ь е установлены в
цепи нитания магнитов 24 и 25. В электросхему введен тумблер-переключатель 38 вида движения самоходного манипулятора, расположенный на пульте 31 управления.
Механизм поворота работает следуюпшм
образом.
Для обычного способа движения самоходного манипулятора, т.е. вдоль его продольной оси и с поворотами, тумблер-переключатель 38 ставят в положение «Норма
(например левое положение но фиг. 2). При нейтральном положении колес путевой выключатель 32 подает питание на обмотку реле 33, которое замыкает свои контакты 34 и 35. Контакт 34 подает питание на электромагнит 24, который переключает гидрораспределитель 23 в положение, обеспечивающее подвод масла в нл оковые полости гидроцилиндров 20, 21 и 22. Последние переводят муфты 14 15 п 16 в верхнее положение (как изображено на фиг. 3, 4 и 5), при котором срабатывает концевой выключатель 36 и размыкает цепь питания электромагнита 24. Гидрораспределитель 23 возвращается в исходное (нейтральное) положение, фиксируя посредством запертых гидроцилиндров муфты в верхнем положении. В результате
валы 1 и 2 связываются перекрестной не- редачей, а вал 3 фиксируется относительно рамы. Вращая руль 30, воздействуют на гидрораспределитель 27, который подает рабочую жидкость в гидромотор 26, заставляя его и вал 1 вращаться в соответетвующем направлении. Цепь 9 обеспечивает синхронный поворот колес 4 и 5 па одг.нако- вые углы, но в противоположных нанран.е ПИЯХ. При этом углы поворота колег не ограничены и манипулятор может осуществлять маневрирование с любыми радиусами
поворотов в обоих нанравлениях. Так, п:ги движении влево (по фиг. 1), отк тоняя от нейтрали передпее колесо 4 против часовой стрелки, а заднее колесо 5 - в противоположном направлении, обеспечивают поворот
самоходного манипулятора против часовой стрелки. С увеличением отклонения колес 4 и 5 от нейтрали радиус поворота манипулятора уменьщается за счет перемещения точки нересечепия осей Ko;iec 4 и 5 вдоль оси иеноворачиваемого колеса 6 из бесконечности К опорному треугольнику. При совмещении точки пересечения осей колес 4 и 5 с ко- .лесом 6 радиус поворота манипулятора близок к ве,личине его колеи и обеспечивается поворот манипулятора вокруг колеса 6. Дальнейщий поворот колес 4 и 5 уменыпает
радиус поворота. Предельным яв.чяется угол поворота колес 4 и 5 от нейтрали (для равностороннего опорного треугольника этот угол равен 60), при котором точка пересечения осей колес совмещена с геометрическим центром опорного треугольника. В этом случае радиус поворота равен нулю и обеспечивается разворот манипулятора на месте против часовой стрелки. Такой разворот мож;чо
осуществлять на площадке, размеры которой незначительно превышают габариты манипулятора, так как все колеса движутся по одной окружности, описывающей опорный треугольник.
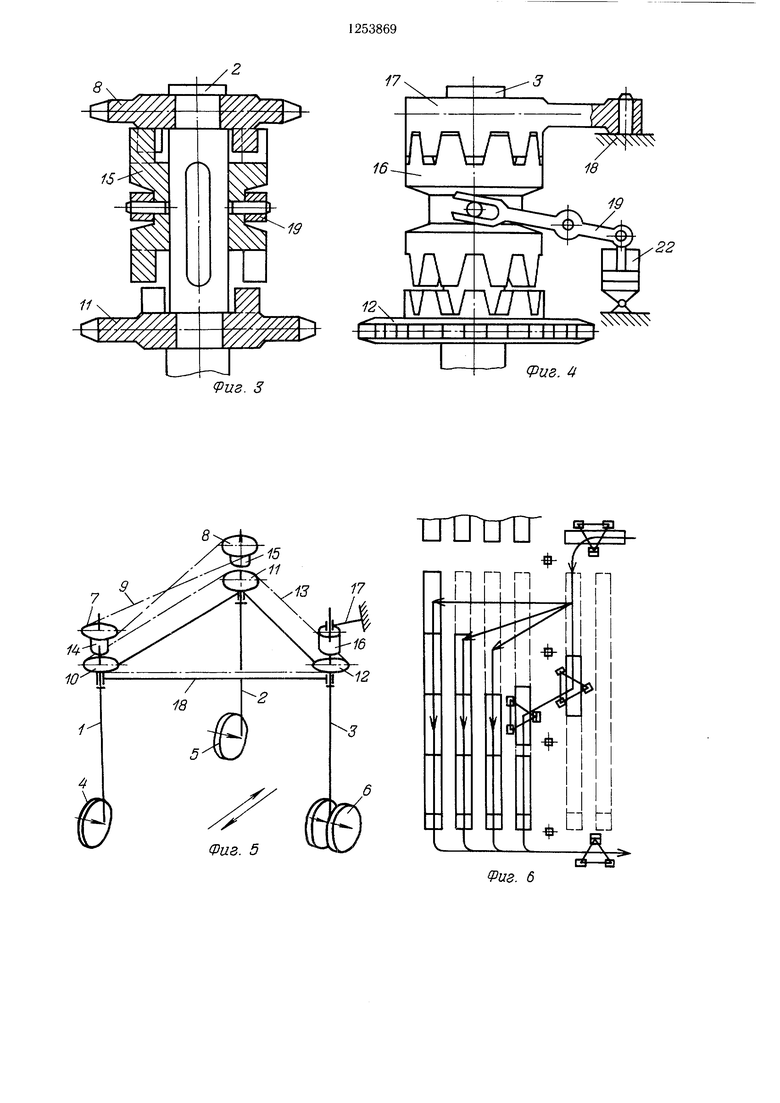
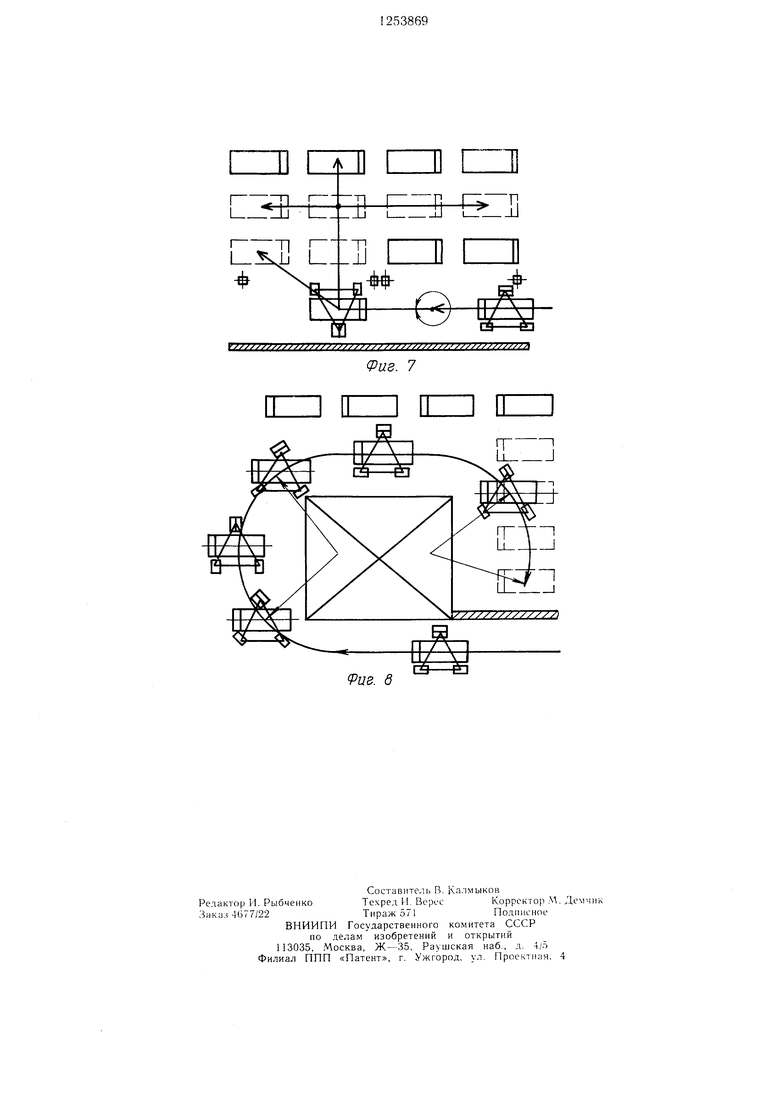
Для поворота манипулятора по часовой стрелке колесо 4 поворачивают от нейтрали по часовой стрелке, а колесо 5 - против. В этом случае также может быть достигнут поворот на месте, но по часовой стрелке при совмещении точки пересечения осей с геометрическим центром опорного треугольниа. При равностороннем опорном треугольнике предельный угол отклонения от нейтрали колес 4 и 5 составляет 120°. Таким образом, полный угол поворота колес 4 и 5, необходимый для поворотов манипулятора с минимальными радиусами (разворотов на месте) в обоих направлениях, равен 180°. Это обеспечивает цепная (или ременная) передача 9. Малые радиусы поворота обеспечивают манипулятору необходимую маневренность в стесненных условиях монтажной площадки (фиг. 6, въезд манипулятора на участок сборки оборудования из отдельных секций и выезд с него). Развороты на месте могут быть использованы для переориентации груза без его перехвата (фиг. 7), чего не могут выполнить известные погрузчики (они для переориентации груза, вывезенного, например, из тупика, должны освободиться от него и захватить груз с противоположной стороны, что не всегда возможно).
Для перевода манипулятора в поступательное движение под углом к его продольной оси на ходу или на стоянке тумблер- переключатель 38 ставят в положение «Краб (правое по фиг. 2). При этом способе движения лТ,олжен быть обеспечен синхронный поворот всех трех колес на один и тот же угол в одном направлении. Если в момент переключения тумблера колеса 4 и 5 не находятся в нейтральном положении, то реле 33 не срабатывает и открытая передача 13 не включается. Рулем 30 на ходу или на стоянке устанавливают колеса 4 и 5 в нейтральное положение, т.е. согласовывают их с колесом 6 (которое до сих пор находилось
в нейтральном положении), путевой выключатель 32 включает реле 33, которое своим контактом 35 включает электромагнит 25. Последний переключает гидрораспределитель 23 в положение, обеспечивающее подвод масла в поршневые полости гидроцидиндров 20, 21 и 22. В результате срабатывания гидроцилиндров все муфты занимают нижнее положение, соединяя валы 1, 2 и 3 со звездочками 10, 11 и 12 открытой передачи. Муфты в крайнем нижнем положении нажимают на концевой выключатель 37 и прекрап1ают питание электромагнита 25. Вращением руля поворачивают все три колеса на любой угол, необходимый для выполнения маневра способом «Краб. На фиг. 6 и 7 показаны варианты маневрирования с использованием движения способом «Краб под различными углами к продольной оси самоходного манипулятора. На фиг. 8 показано, что, плавно изменяя угол поворота всех колес цепью 13, можно совершать и криволинейные поступательные движения, например, для объезда препятствия с сохранением первоначально|-о пространственного положения осей перевозимого груза, что может потребоваться при выполнении монтажных или складских работ. В этом случае может потребоваться угол
поворота колес около 360° и более.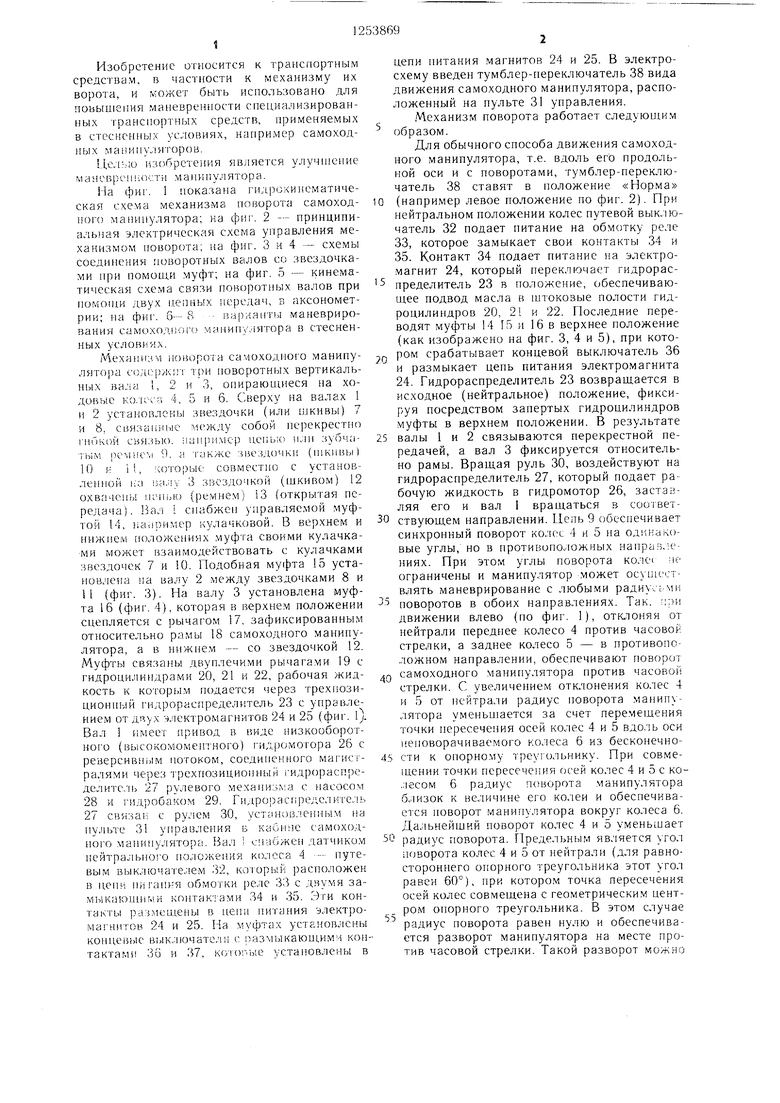
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая часть грузоподъемного средства | 1981 |
|
SU992395A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU872366A1 |
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| ВЕЗДЕХОД | 2007 |
|
RU2347708C2 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |

32 -фиг. 2
1
ДА АЛ
ж
16
19
PU8. 4
15 11
Фиг. 5
иишг г
Га
17
Г
П Г1
П
Ф|.
йЬ
Фиг. 6
3-F
I-1
Риг. 7
VU8. 8
И-а
| Выложенная заявка ФРГ № 3035004, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
