Изобретение предназначено для очистки транспортных средств, в частности железнодорожных вагонов.
Известен манипулятор для очистки транспортных средств, содержащий смонтированный с возможностью перемещения на портале очистной рабочий орган.
Недостатком данного манипулятора является ограниченное перемещение рабочего органа и недостаточное качество очистки загрязненных поверхностей вагонов.
Наиболее близким по технической сущности является манипулятор для очистки вагонов, содержащий портальную раму с установленной на ней с возможностью перемещения в горизонтальной плоскости самоходной тележкой и закрепленным на ней телескопическим звеном с рабочим органом и орган управления.
Недостаток данного манипулятора заключается в том, что при очистке рабочий орган перемещается по сложной траектории, кроме того, по углам и на балках нижней обвязки кузова образуются валики остатков груза, что снижает качество очистки вагонов.
Цель изобретения - повышение качества очистки вагонов.
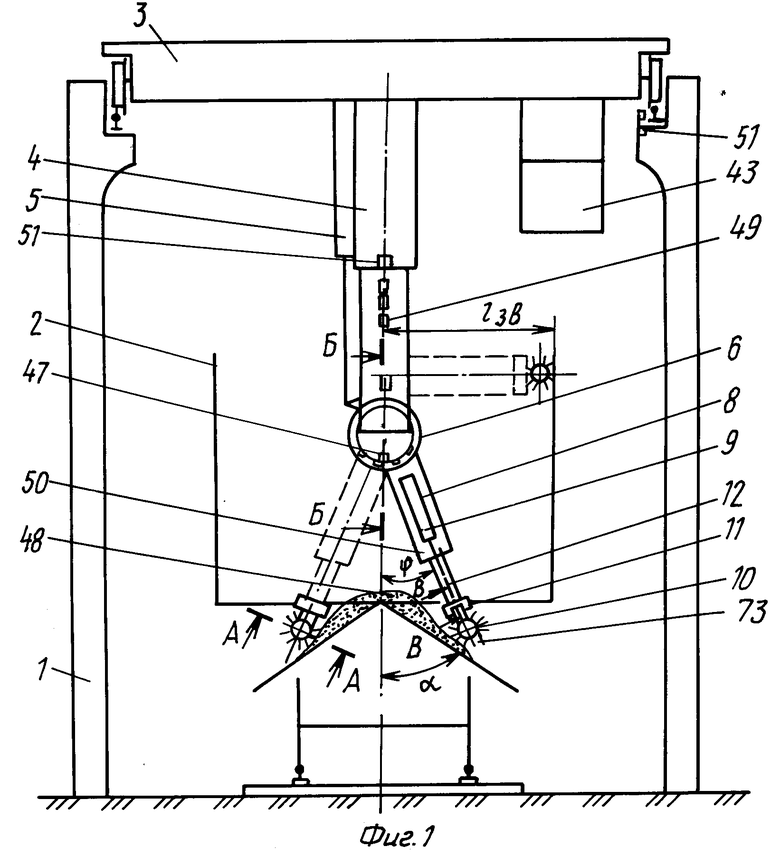
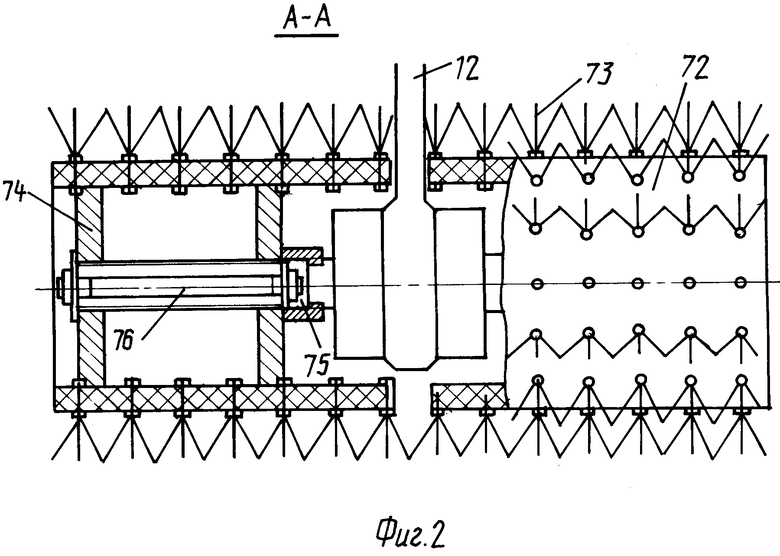
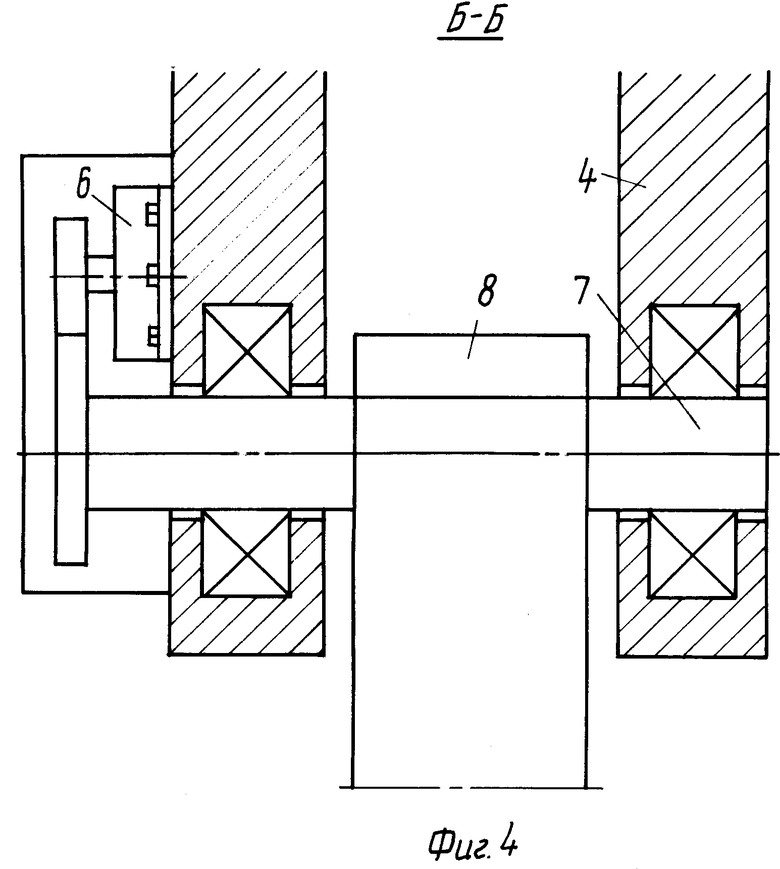
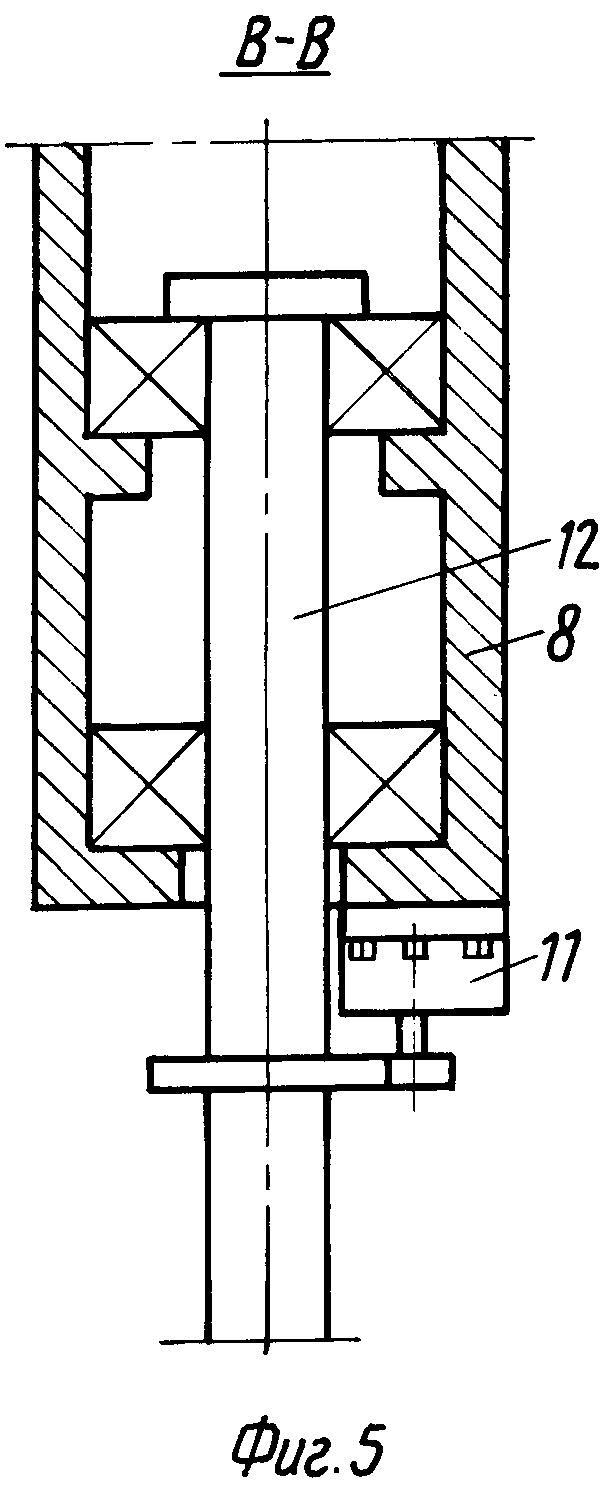
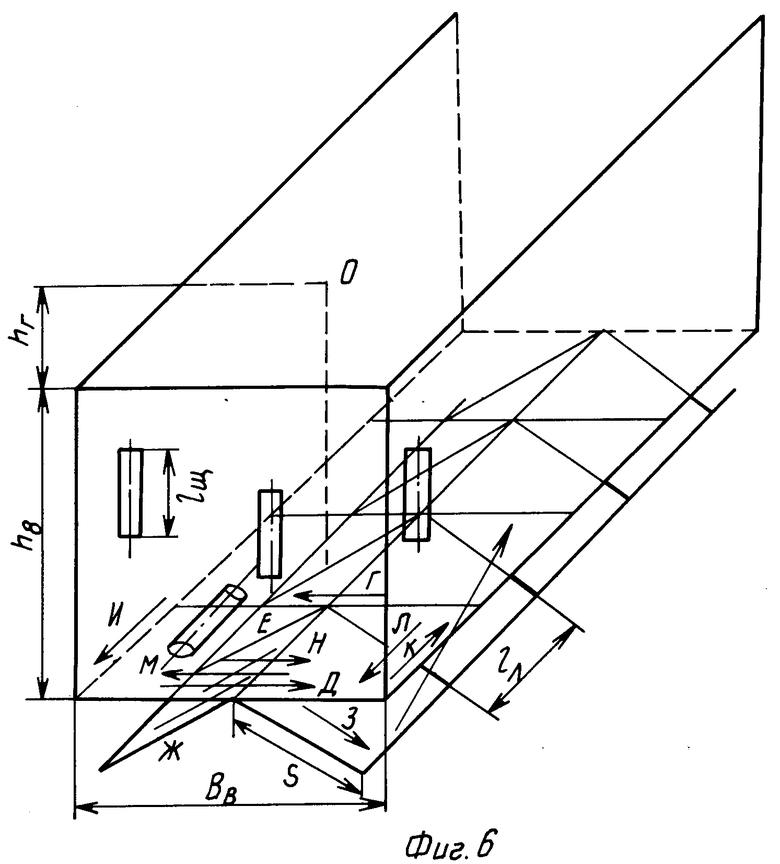
На фиг. 1 изображен описываемый манипулятор; на фиг.2 - сечение А-А на фиг.1; на фиг.3 - привод самоходной тележки; на фиг.4 - сечение Б-Б на фиг. 1; на фиг. 5 - сечение В-В на фиг.1; на фиг.6 - схема перемещений щетки в кузове полувагона; на фиг.7 - гидравлическая схема приводов щетки и тележки; на фиг. 8 - принципиальная схема органа управления манипулятором и на фиг.9 - блок схемы органа управления.
Манипулятор для очистки вагонов содержит портальную раму 1, на верхней части которого установлена с возможностью передвижения вдоль полувагона 2 самоходная тележка 3, несущая закрепленное с нижней стороны телескопическое звено 4 с гидроцилиндром 5 и гидродвигателем 6.
На раздвоенном конце телескопического звена 4 в подшипниках смонтирована ось 7 с консолью, закрепленным зубчатым колесом. С наружной стороны, противоположной гидроцилиндру 5, жестко закреплен гидродвигатель 6, шестерня на валу которого установлена с возможностью зацепления с указанным колесом.
На последнем участке звена 4 установлено с возможностью поворота в вертикальной плоскости гидродвигателем 6 дополнительное телескопическое звено 8 с гидроцилиндром 9 его перемещения, несущее рабочий орган 10. Последний смонтирован с возможностью поворота гидродвигателем 11 вокруг оси перемещения звена 8.
Хвостовик выдвижной рукояти 12 смонтирован в последний участок звена 8 посредством установленных внутри на его выступах подшипников с возможностью удержания фиксаторами. С нижней стороны звена 8 жестко закреплен гидродвигатель 11, шестерня на валу которого установлена с возможностью зацепления с зубчатым колесом, закрепленным на хвостовике рукояти 12.
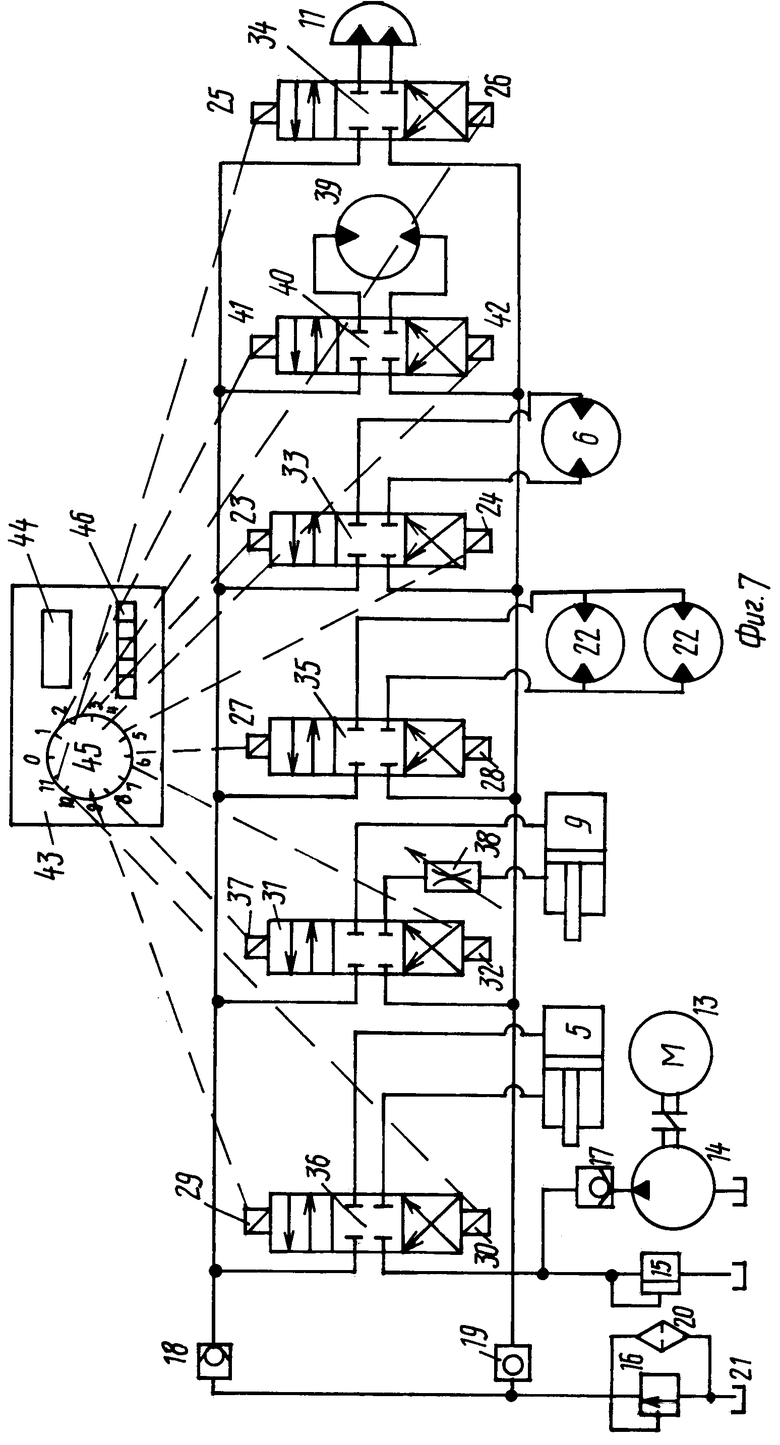
Приводимый от электродвигателя 13 насос 14 соединен через систему трубопроводов с предохранительными 15 и 16 и обратными 17-19 клапанами, фильтром 20, баком 21 и двумя гидродвигателями 22, встроенными в рабочий орган 10.
Гидродвигатели 6, 11 и 22 и гидроцилиндры 5 и 9 подключены посредством системы трубопроводов и управляемых от электромагнитов 23-32 гидрораспределителей 33-37 к указанному насосу 14. При этом гидроцилиндр 9 подключен к гидрораспределителю 37 через дроссель 38. Привод перемещения самоходной тележки 3 состоит из гидродвигателя 39, связанного механической передачей с установленным в подшипниках ее опор валом ведущих колес и подключенного к насосу 14 через гидрораспределитель 40, управляемый электромагнитами 41 и 42.
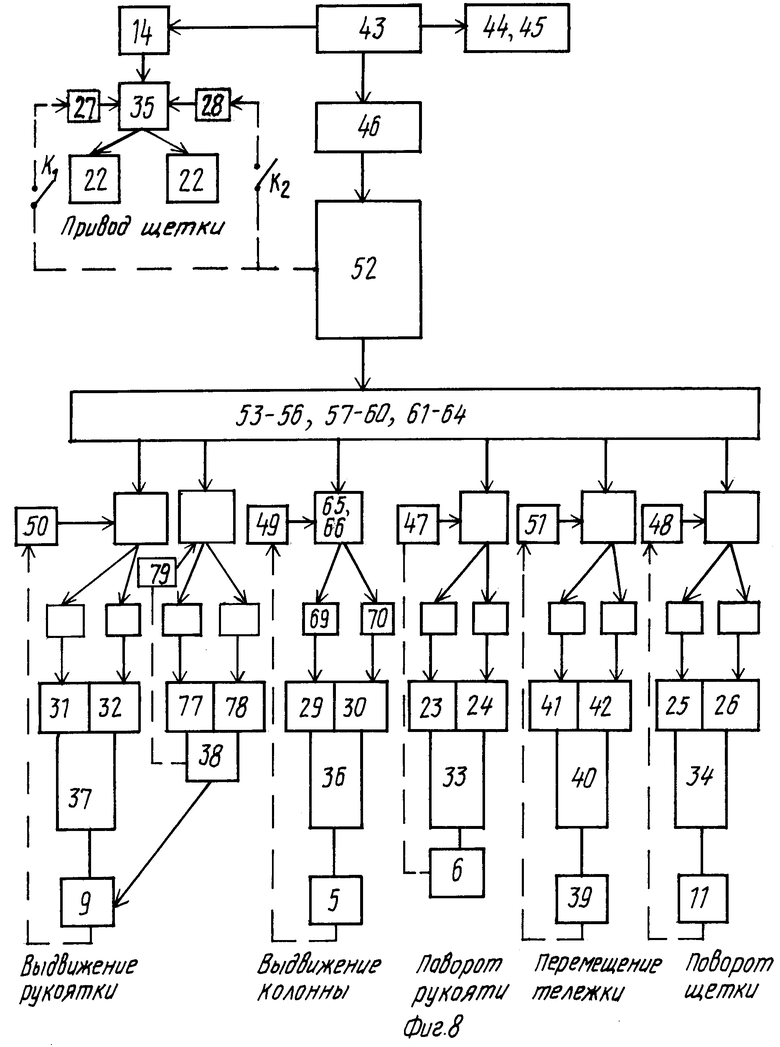
Орган 43 управления манипулятора включает информационное табло 44, к которому подключены провода от электромагнитов 23-32, 41 и 42 и расположены измерительные приборы 45 с кнопками 46 ручного управления "Пуск", "Ручное управление", "Остановка", "Автомат", "Выключен" и с датчиками угловых 47, поворотных 48 и линейных 49 и 50 перемещений рабочего органа 10 и датчик 51 перемещений самоходной тележки 3. Датчики 47-50 выполнены в виде магнитных контактов (герконов), встроенных в подвижные звенья многозвенного механизма из телескопических звеньев 4 и 8, и замыкающих электромагнитов, установленных на их неподвижных звеньях. Магнитные контакты датчика 51 закреплены рядом с рельсовой колеей самоходной тележки 3, а их электромагниты установлены с возможностью взаимодействия с ребордой колеса самоходной тележки 3. Для автоматического включения и выключения сигналов от датчиков 47-51 к исполнительным механизмам манипулятора орган 43 управления снабжен устройством 52 ввода программы, например, аналогично применяемого в ЭВМ фотосчитывающего устройства с перфолентой и микроэлектронным устройством управления, выполненным из RS-триггеров 53-56, дешифраторов 57-60, элементов И-ИЛИ 61-66, соединительных шин 67-70 и инвертора 71.
Рабочий орган 10 выполнен в виде приводной цилиндрической щетки, состоящей из двух барабанов 72 по обе стороны от опоры рукояти 12. Барабаны 72 изготовлены из упругого материала, например конвейерной ленты, по поверхности которой посредством заклепок во втулках закреплены пучки 73 ворса. Торцовые крышки 74 из металла жестко закреплены внутри каждого барабана 72.
На свободном конце выдвижной рукояти 12 с каждой боковой стороны относительно центральной линии закреплено по одному гидродвигателю 22. Вал каждого гидродвигателя 22 расположен перпендикулярно рукояти 12 и через шлицевую муфту 75 соединен с гибким валом 76. На защитной оболочке гибкого вала 76 вставлены и закреплены на них торцовые крышки 74 барабана 72, между которыми посредством винтовых передач с гайками зафиксирован гибкий вал 76.
Для регулирования скорости движения и фиксации звеньев в определенном положении к гидросхеме могут быть подключены дросселирующие устройства и гидрозамки. Например, для выдвижения из дополнительного телескопического звена 8 рукояти 12 гидроцилиндром 9 дроссель 38 имеет электромагниты 77 и 78, включаемые датчиком 79 аналогично включению датчиков 47-50.
Манипулятор работает следующим образом.
Полувагон 2, предназначенный под очистку, устанавливается под портальной рамой 1 и фиксируется в таком положении, чтобы рабочий орган 10 мог касаться его первой торцовой стены. После нажатия оператором кнопки "Пуск" включается от электросети электродвигатель 13 насоса 14 и гидродвигатели 22 вращают цилиндрическую щетку, длина которой равна ширине проема люка, т.е. расстоянию между двумя соседними поперечными балками кузова.
Рабочий орган 10 очищает внутренние поверхности кузова от остатков сыпучих грузов, выметая их пучками 73 ворса в открытые нижние люки. Гибкие валы 76, установленные с обеих сторон выдвижной рукояти 12, позволяют изгибаться барабанам 72 относительно неподвижно закрепленных гидродвигателей 22. Этим самым повышается надежность работы щетки на ребристых (угловых) поверхностях и повышается качество очистки от больших масс груза. В нормальных условиях работы гибкие валы 76 располагаются по одной линии. Для очистки различных по сторонам хребтовой балки крышек люков гидрораспределителем 35 производится реверсирование гидродвигателей 22.
При "Ручном управлении" с органа 43 управления подается питание на электромагнит 29, который включает гидрораспределитель 36, жидкость подается по его верхней полости в бесштоковую полость гидроцилиндра 5 и телескопическое звено 4 с дополнительным телескопическим звеном 8 опускается в кузов вагона до остановки соответствующим размыкающим магнитным контактом датчика 49. При подаче питания на электромагнит 23 включается через гидрораспределитель 33 гидродвигатель 6, который производит поворот последнего звена 8 на определенный угол, заданный соответствующим расположением на нем магнитных контактов датчика 47. После этого оператор подает питание на электромагнит 31, который включает верхнюю полость гидрораспределителя 37, открывая доступ жидкости в бесштоковую полость гидроцилиндра 9. Перемещение рукояти 12 из звена 8 до боковой стены кузова и конца крышки люка осуществляется закрепленным на его боковой стороне гидроцилиндром 9 и фиксируется расположением магнитных контактов датчика 50.
При очистке наклонных крышек люков полувагона скорость выдвижения Vвыдв рукояти 12 регулируется управляемым от датчика 79 дросселем 38 по следующей зависимости:
Vвыдв.=  где S - длина крышки люка;
где S - длина крышки люка;
Vопус - скорость опускания звена 4;
lзв. - длина звена 8 в сложенном состоянии.
В это же время скорость ω поворота гидродвигателем 6 дополнительного телескопического звена 8 должна быть равна
ω =  где ϕ = arctg
где ϕ = arctg  - угол наклона дополнительного телескопического звена 8 к вертикали;
- угол наклона дополнительного телескопического звена 8 к вертикали;
Н = hв + hг - глубина опускания телескопического звена 4, равная сумме высоты hв вагона и верхней границы габарита цилиндрической щетки над вагоном hг;
α - угол наклона крышки люка к вертикали.
П р и м е р 1. Задано S = 1,5 м; lзв = 1 м; Н = 3 м;
Vопус = 1 м/c; α = 30o
Определить скорости Vвыдв и ω.
Vвыдв.=  = 1,5 м/с
= 1,5 м/с
 t
t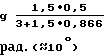 = arctg
= arctg  = arctg 0,174 ≈
= arctg 0,174 ≈
ω =  = 0,173 рад/с
= 0,173 рад/с
П р и м е р 2. Задано S = 1,5 м; lзв = 0,5 м; Н = 3 м;
Vопус = 0,5 м/c; α = 20o.
Определить скорости Vвыдв и ω.
Vвыдв.=  = 1,5 м/с
= 1,5 м/с
 t
t = arctg
= arctg  = arctg 0,116 ≈
= arctg 0,116 ≈
ω =  = 0,115 рад/с.
= 0,115 рад/с.
При подаче питания на электромагнит 41 включается через гидрораспределитель 40 гидродвигатель 39 и самоходная тележка 3 с цилиндрической щеткой перемещается от первого до второго магнитного контакта датчика 51, который срабатывает при наезде на него колеса тележки. Производится очистка следующих пар крышек люков и так далее, пока рабочий орган 10 достигнет второй торцовой стены вагона.
Рабочий орган 10 перемещается по поперечным балкам и наклонным крышкам люков вагона в горизонтальном положении (стрелки Г, Д, Е, Ж, З), а по продольным балкам и торцовым стенам в вертикальном положении (стрелки И, К, Л, М, Н). На фиг.6 предлагается следующая последовательность операций перемещения щетки в кузове четырехосного полувагона от ее "0" положения:
опускание в вагон горизонтальной щетки на hв + hг; очистка 2-й поперечной балки при перемещении тележки на bв (на ширину вагона); подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки на 2lл + bв; поворот обратно на 180о; опускание на 1/2lщ и очистка нижней обвязки вагона при перемещении портала и тележки на 1/2lл + 1,5bв; опускание с подъемом и очистка крышек люков на 0,5lв + 1,0bв; передвижение портала на lл (длину крышки люка);
очистка 3-й поперечной балки при перемещении тележки на 1,5bв; подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки на 2lл + bв; опускание на 1/2lщ и поворот обратно на 180о; опускание с подъемом и очистка крышек люков при перемещении портала и тележки на 1/2lл + 1,5bв; передвижение портала на lл;
очистка 4-й поперечной балки при перемещении тележки на 1,5bв; подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки 2lл + bв;
опускание на 1/2lщ и поворот обратно на 180о; опускание с подъемом и очистка крышек люков при перемещении портала и тележки на 1/2lл + 1,5bв; передвижение портала на lл;
очистка 5-й поперечной балки при перемещении тележки на 1,5bв; подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки на 2lл + bв; опускание на 1/2lщ и поворот обратно на 180о; опускание с подъемом и очистка крышек люков при перемещении портала и тележки на 1/2lл + 1,5bв; передвижение портала на lл;
очистка 6-й поперечной балки при перемещении тележки на 1,5lв; подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки на 2lл + bв; опускание на 1/2lщ и поворот обратно на 180о; опускание с подъемом и очистка крышек люков при перемещении портала и тележки на 1/2lл + 1,5bв; передвижение портала на lл;
очистка 7-й поперечной балки при перемещении тележки на 1,5bв; подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки на 2lл + bв; опускание на 1/2lщ и поворот обратно на 180о; опускание с подъемом щетки и очистка крышек люков при перемещении портала и тележки на 1/2lл + 1,5bв; передвижение портала на lл; очистка последней поперечной балки при перемещении тележки на bв; подъем на 1/2lщ и поворот щетки на 180о; очистка боковых стенок при перемещении портала и тележки на 2lл + bв; опускание на 1/2lщ и поворот обратно на 180о; опускание с подъемом и очистка крышек люков при перемещении портала и тележки на 1/2lл + 1,5bв; подъем из вагона на hв + hг; перемещение тележки к другому вагону.
Для поворота цилиндрической щетки на 90о телескопическое звено 4 поднимается до отметки, при которой срабатывает первый магнитный контакт датчика 49, включающий электромагнитом 30 гидрораспределитель 36 и направляющий поток жидкости в штоковую полость гидроцилиндра 5. Поворот в вертикальное положение осуществляется от гидродвигателя 11, включаемого магнитными контактами датчика 48 через электромагнит 25 гидрораспределителя 34. После очистки торцовых стенок для возврата щетки в горизонтальное положение и при очистке одной из поперечной балок необходимо перемещение самоходной тележки 3 на расстояние, равное половине ширины крышки люка.
Обратное перемещение телескопических звеньев 4 и 8 и поворот цилиндрической щетки производится гидроцилиндрами 5 и 9 и гидродвигателем 11, подключенными посредством электромагнитов 30, 32 и 26 к соответствующим гидрораспределителям 36, 37 и 34. Электромагниты 27 и 28 управляют гидрораспределителем 35 и включают гидродвигатели 22 в ту или иную сторону. Обратное перемещение самоходной тележки 3 производится гидродвигателем 39 через гидрораспределитель 40 с электромагнитом 42.
При нажатии оператором на органе 43 управления кнопки "Автомат" производится автоматическое включение в работу гидроцилиндров 5 и 9 с дросселем 38, гидродвигателей 6, 11, 39 и 22 от датчиков 47-51, 79 и устройства 52 ввода программы.
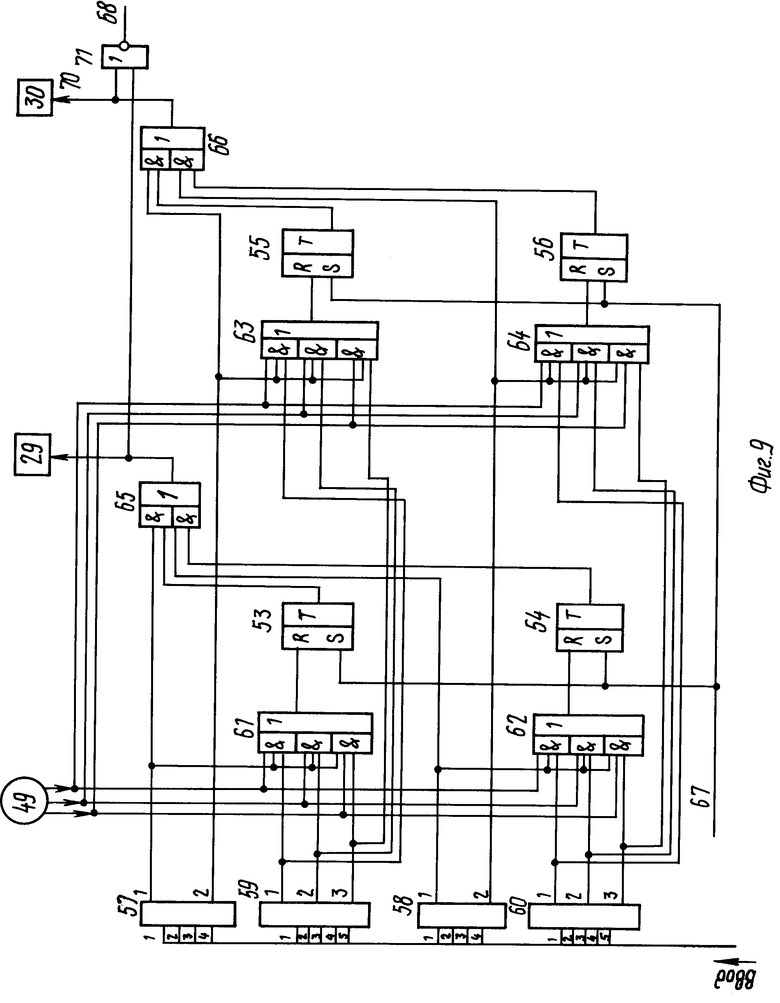
При включенном микроэлектронном устройстве управления асинхронные RS-триггеры 53-56 сбрасываются в нулевое состояние. На осуществляющих, например, включение гидрораспределителя 36 шинах 69 и 70 выставляются нулевые уровни (гидрораспределитель выключен). Затем устройство 52 ввода программы считывает очередную команду, содержащую номера электромагнитов 29 или 30 гидрораспределителя 36, которые должны быть включены, и номера магнитных контактов датчика 49, которые должны быть достигнуты при перемещении гидроцилиндром 5 телескопического звена 4. Эта информация поступает на входы дешифраторов 57-60, два из которых содержат номера электромагнитов 29 и 30 гидрораспределителя 36, а два других - номера магнитных контактов датчика 49, после чего формируется единичный импульс на шине 67 (старт), который переключает триггеры 53-56 в состояние "1". На выходах логических элементов 65 и 66, последовательные номера которых введены в дешифраторы 57 и 58, выставляется напряжение, соответствующее единичному сигналу, и происходит включение одного из электромагнитов 29 или 30 гидрораспределителя 36.
При выдвижении поршня гидроцилиндра 5 на расстояние, определяемое расположенным на телескопическом звене 4 i-м магнитным контактом датчика 49, в логические элементы 61-64 поступает единичный импульс.
Происходит сравнение номера магнитного контакта датчика 49 с номером, хранимым в дешифраторах 59 и 60. При совпадении обоих номеров триггеры 53 и 55 (54 и 56) перебрасываются в состояние "0", сбрасывается сигнал на шинах 69 и 70 и происходит отключение гидрораспределителя 36 соответствующим электромагнитом 29 или 30. Когда электромагниты 29 и 30 гидрораспределителя 36 обесточены, на шине 68 инвертор 71 формирует напряжение логической "1". По данному единичному сигналу и нулевому сигналу шины 67 сбрасываются триггеры 53-56, и устройство 52 ввода программы осуществляет считывание очередной команды. На шине 67 формируется единичный сигнал и описанный цикл повторяется.
Автоматическое управление работой гидроцилиндра 9 с дросселем 38 и гидродвигателей 6, 11 и 39 осуществляется по другим аналогичным блокам микроэлектронного органа управления от датчиков 50, 79, 47, 48 и 51. Таким образом, каждый блок микроэлектронного органа управления содержит электромагниты для включения отдельного гидрораспределителя, датчик перемещения и две цепи, каждая из которых включает в себя первый и второй дешифраторы, первый и второй элементы И-ИЛИ, первый и второй RS-триггеры и третий и четвертый элементы И-ИЛИ. Первый и второй выходы первого дешифратора каждой цепи подключены соответственно к входам первого и второго логических элементов И-ИЛИ. Первый и второй выходы второго дешифратора через соответственно третий и четвертый элементы И-ИЛИ и первый и второй RS-триггеры подключены к первому и второму логическим элементам И-ИЛИ и датчику перемещения. Элементы И-ИЛИ подключены к входам соответствующих электромагнитов гидрораспределителей. При этом выход датчика перемещения подключен к одним из входов первого логического элемента каждой цепи.
Включение и выключение вращения цилиндрической щетки гидродвигателями 22 в обе стороны производится при замыкании и размыкании соответствующих контактов К1 и К2 в цепи питания электромагнитов 27 или 28.
Эффективность манипулятора заключается в качественной очистке вагонов за счет перемещения щетки по всем очищаемым поверхностям и углам кузова вагона и автоматизации процесса очистки.
Данный орган управления позволяет легко переналаживать программу перемещений в кузове вагона, следует только изменить команды на перфоленте устройства ввода программы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ С ДВУХСКАТНЫМ ПОЛОМ | 1989 |
|
RU2026215C1 |
| Устройство для выгрузки сыпучих грузов из вагонов | 1987 |
|
SU1562266A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ЛОТКОВ ТОННЕЛЕЙ В МЕТРОПОЛИТЕНАХ | 1990 |
|
RU2009294C1 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| Устройство для очистки железнодорожных полувагонов | 1983 |
|
SU1181921A1 |
| Устройство для очистки железнодорожных полувагонов | 1983 |
|
SU1260276A1 |
| Вибрационное устройство для очистки вагонов | 1989 |
|
SU1747301A1 |
| Устройство для закрывания и открывания крышек люков железнодорожных полувагонов | 1989 |
|
SU1678676A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВЕРХНЕЙ КРОМКИ ПОЛУВАГОНОВ | 2012 |
|
RU2512129C1 |
Использование: в железнодорожном транспорте. Сущность изобретения: на портале смонтирована самоходная тележка, несущая механическую ручку с очистным рабочим органом в виде цилиндрической щетки. На барабанах смонтированы пучки ворса, а на торцовых крышках закреплены гибкие валы для изгиба цилиндрической щетки. Гидродвигатели приводного механизма установлены по обе стороны от опоры на рукояти механической руки в двух барабанах, в крышках каждого из которых жестко закреплено по одному гибкому валу, соединенному муфтой с валом соответствующего гидродвигателя. 2 з.п. ф-лы, 9 ил.
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
