Изобретение относится к устройствам для очистки железнодорожных полувагонов.
Цель изобретения - расширение функциональных возможностей.
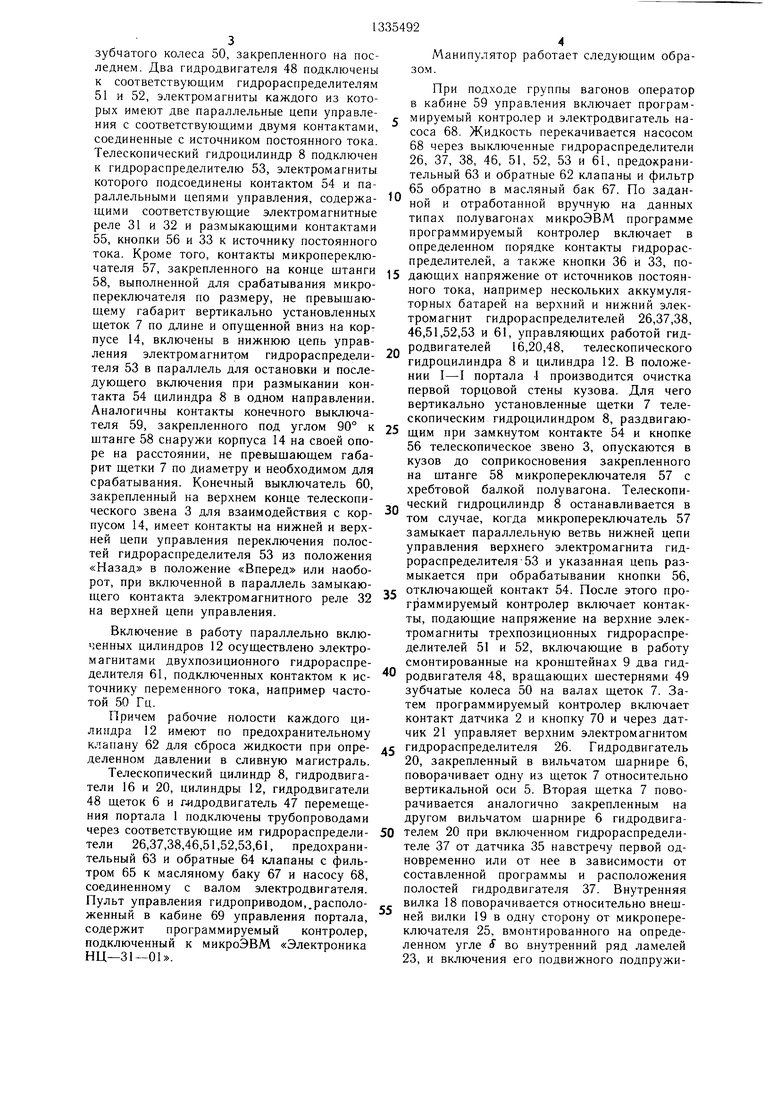
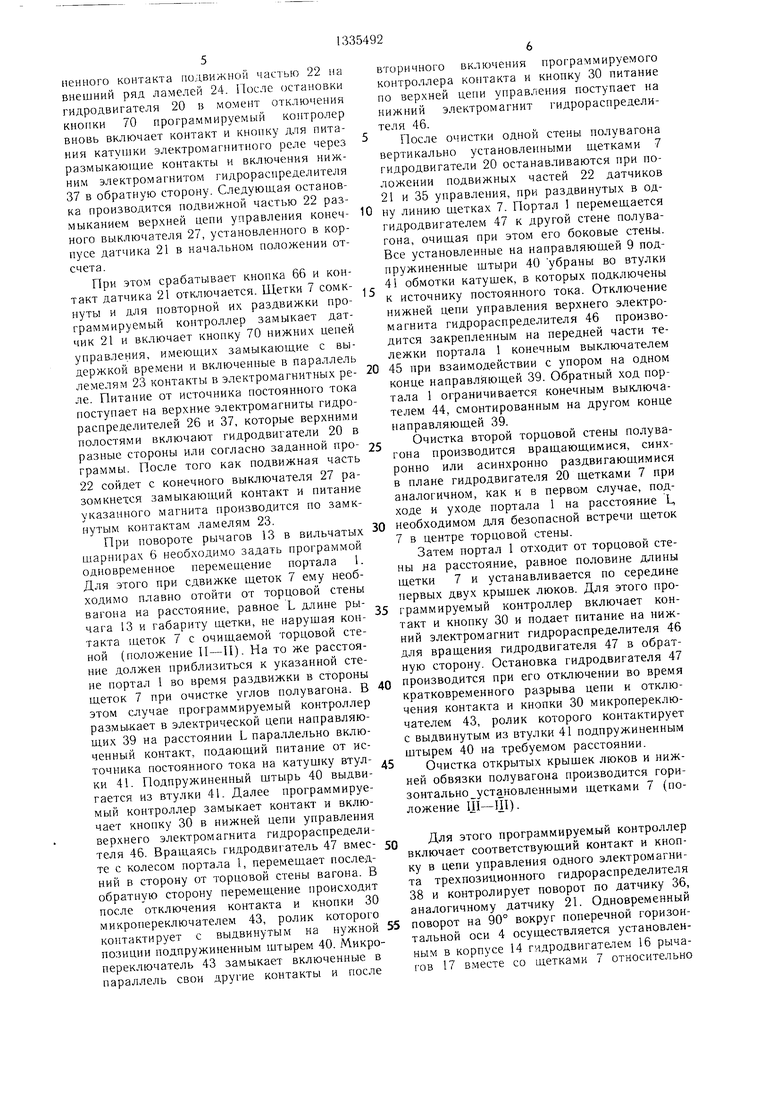
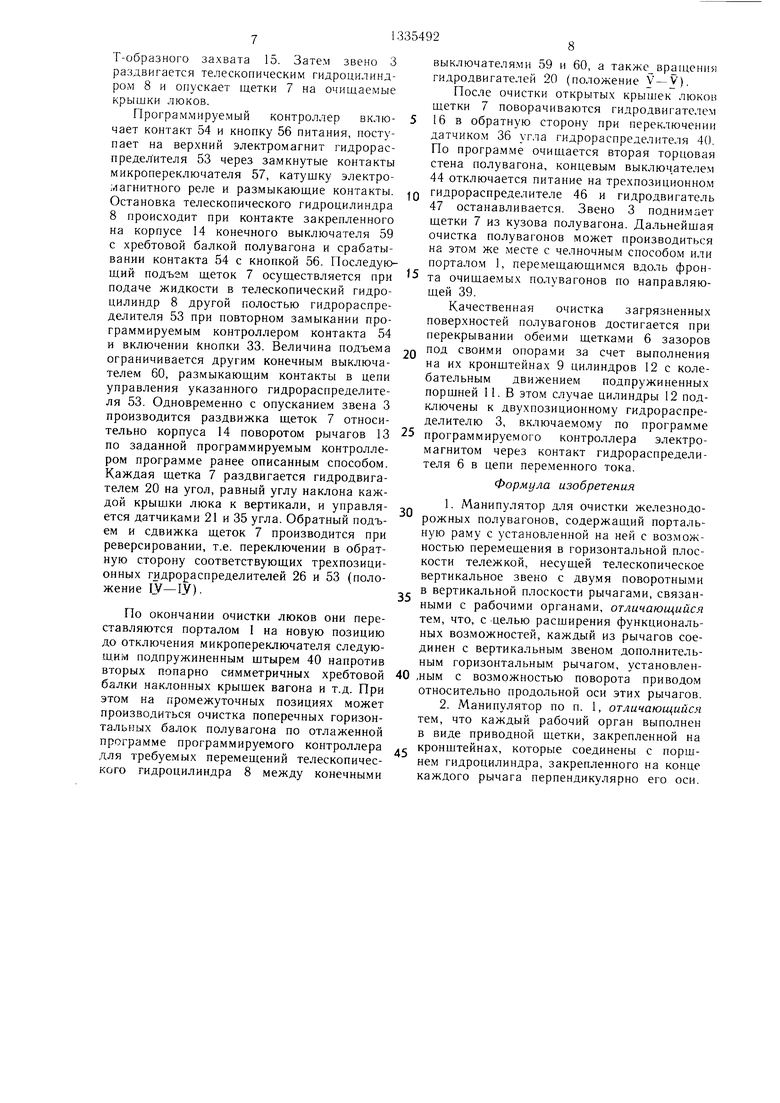
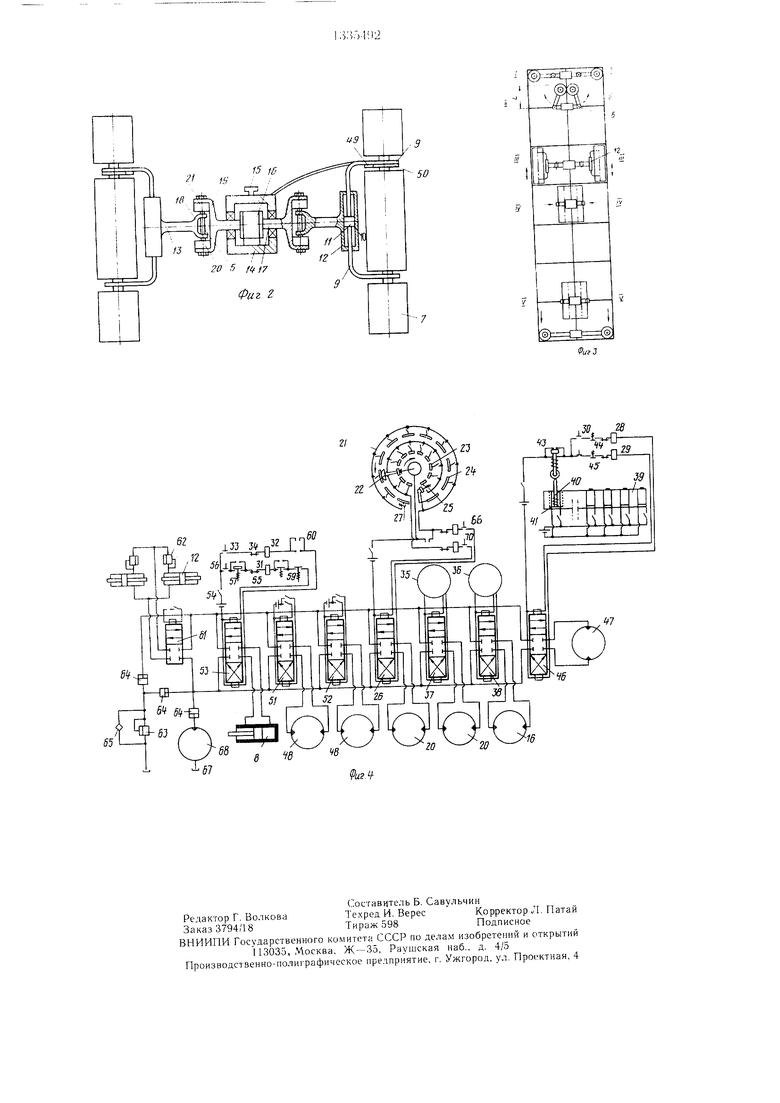
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - рабочий орган; на фиг. 3 - схема перемещений рабочего органа; на фиг. 4 - схема управления.
Манипулятор содержит самоходный портал 1 с кодрвой частью 2, телескопическое звено 3, на нижнем конце которого выполнены с возможностью поворота вокруг горизонтальной поперечной оси 4 в вертикальной плоскости и дополнительного поворота относительно перпендикулярных первой оси 4 осей 5 вильчатых шарниров 6 цилиндрические щетки 7 и телескопическом звене 3 смонтирован телескопический гидроцилиндр 8. Каждая цилиндрическая щетка 7 разделена на три части и за среднюю часть соединена с двумя кронштейнами 9, соединенными между собой жесткой связью 10, через подпружиненный с одной стороны поршень 11, установленный в цилиндре 12. На рычагах 13, расположенных по обе стороны от корпуса 14, снабженного Т-образным захватом 15 для подвески на телескопическое звено 3, жестко закреплено по одному цилиндру 12. В корпусе 14 смонтирован гидродвигатель 16, имеющий редуктор с выходящими в разные стороны двумя дополнительными рычагами 17, соединенными посредством вильчатых шарниров 6 с соответствующими рычагами 13. Между внутренней 18 и внешней 19 вилками каждого вильчатого шарнира 5 установлен на последней гидродвигатель 20. Выходной вал гидродвигателя 20 удлинен для монтажа на нем оси 4 с жестко закрепленной внутренней вилкой 18, а с другой его стороны аналогичным образом смонтирован датчик 21 угла, являющийся второй опорой оси 4 одного вильчатого шарнира 5. Подвижная часть 22 каждого датчика 21 жестко закреплена на конце оси 4 выходного вала гидродвигателя 20, который установлен в подшипниках датчика 21 угла в виде подвижного реохорда сопротивлений.
В корпусе датчика 21 угла, предназначенного для поворота рычага 13, выполнено по окружности два ряда ламелей 23 и 24, один из которых расположен внутри. Ламели 23 и 24 соединены в каждом ряду параллельно через двойные контакты с возможностью включения и отключения подвижной частью 22. Между собой указанные ряды ламелей 23 и 24 соединены последовательно через микропереключатель 25 и подключены двумя параллельными цепями управления различных электромагнитов гидрораспределителя 26 и контактом к источнику постоянного тока. На конце наружного ряда ламелей 24 в верхнюю цепь управления установлены контакты конечного выключателя
27 с возможностью ее отключения подвижной частью 22 нижнег о электромагнита гидрораспределителя 26 и остановки гидродвигателя 20 при обратном его повороте против часовой стрелки. Верхняя цепь управления содержит электромагнитное реле 28, размыкающей контакт 29, кнопку 30. Для включения гидродвигателя 20 по часовой стрелке нижняя цепь управления имеет электромагнитное реле 31, размыкающий кон0 такт 32, кнопку 33 «Пуск 2, и замыкающий контакт 34 с выдержкой времени, равной времени схода подвижной части 22 с конечного выключателя 27.
Датчики 35 и 36 угла, соответственно
5 установленные во втором вильчатом шарнире 5 и с другой стороны корпуса 14 с возможностью поворота подвижной части рычага 17 и предназначенные для управления гидрораспределителями 37 и 38 вторым гидродвигателем 20 и гидродвигателем 16, вклю чают элементы аналогичные датчику 21 угла.
Параллельно рельсовому пути самоходного портала 1 уложена направляющая 39 с расположенными в ряд подпружиненными штырями 40 в виде выступающих за преде5 лы электромагнитов сердечников, установленных во втулках 41, обмотки которых подключены параллельно через контакты к источнику постоянного тока, с возможностью подъема и опускалия датчиком 42 переме- щений, закрепленным снизу на тележке портала 1. Датчик 42 перемещений состоит из микропереключателя 43, закрепленного в корпусе на подпружиненном стержне с роликом на конце, и двух установленных спереди и сзади на тележке самоходного пор5 тала с возможностью включения упорами на направляющей 39 конечных выключателей 44 и 45, подключенных по отдельности к двум параллельным цепям управления различных электромагнитов гидрораспределителя 46 для гидродвигателя 47.
Контакты микропереключателя 43 включены параллельно впереди указанных цепей управления и предназначены для периодического включения кнопок 30 и 33 при пропуске ролика датчика 42 перемещений по
5 подпружиненным штырям 40 направляющей 39. В параллельные цепи управления включены размыкающие контакты конечных выключателей 44 и 45 для выключения соответствующих электромагнитов гидрораспределителя 46 из положений «Вперед
0 или «Назад и остановки портала 1.
У гидродвигателя 47, смонтированного на тележке портала 1 соосно одному ее колесу, выходной вал жестко соединен с осью этого колеса.
г На одном из кронщтейнов 9 каждой щетки 7 закреплено по гидродвигателю 48, выходной вал которого в закрытом кожухе имеет жестко насаженную на нем шестерню 49 и связан с валоп щетки 7 посредством
зубчатого колеса 50, закрепленного на последнем. Два гидродвигателя 48 подключены к соответствующим гидрораспределителям 51 и 52, электромагниты каждого из которых имеют две параллельные цепи управления с соответствующими двумя контактами, соединенные с источником постоянного тока. Телескопический гидроцилиндр 8 подключен к гидрораспределителю 53, электромагниты которого подсоединены контактом 54 и параллельными цепями управления, содержащими соответствующие электромагнитные реле 31 и 32 и размыкающими контактами 55, кнопки 56 и 33 к источнику постоянного тока. Кроме того, контакты микропереклю10
Манипулятор работает следующим образом.
При подходе группы вагонов оператор в кабине 59 управления включает программируемый контролер и электродвигатель насоса 68. Жидкость перекачивается насосом 68 через выключенные гидрораспределители 26, 37, 38, 46, 51, 52, 53 и 61, предохранительный 63 и обратные 62 клапаны и фильтр 65 обратно в масляный бак 67. По заданной и отработанной вручную на данных типах полувагонах микроЭВМ программе программируемый контролер включает в определенном порядке контакты гидрораспределителей, а также кнопки 36 и 33, почателя 57, закрепленного на конце щтанги ,5 дающих напряжение от источников постоян- 58, выполненной для срабатывания микро- например нескольких аккумуляторных батарей на верхний и нижний электромагнит гидрораспределителей 26,37,38, 46,51,52,53 и 61, управляющих работой гид- jf, родвигателей 16,20,48, телескопического гидроцилиндра 8 и цилиндра 12. В положении I-I портала -1 производится очистка первой торцовой стены кузова. Для чего вертикально установленные щетки 7 телескопическим гидроцилиндром 8, раздвигаю- теля 59 закрепленного под углом 90 к 25 щим при замкнутом контакте 54 и кнопке щтанге 58 снаружи корпуса 14 на своей опо- 56 телескопическое звено 3, опускаются в ре на расстоянии, не превышающем габапереключателя по размеру, не превышающему габарит вертикально установленных щеток 7 по длине и опущенной вниз на корпусе 14, включены в нижнюю цепь управления электромагнитом гидрораспределителя 53 в параллель для остановки и последующего включения при размыкании контакта 54 цилиндра 8 в одном направлении. Аналогичны контакты конечного выключа35
РИТ щетки 7 по диаметру и необходимом для срабатывания. Конечный выключатель 60, закрепленный на верхнем конце телескопического звена 3 для взаимодействия с кор- 0 пусом 14, имеет контакты на нижней и верхней цепи управления переключения полостей гидрораспределителя 53 из положения «Назад в положение «Вперед или наоборот, при включенной в параллель замыкающего контакта электромагнитного реле 32 на верхней цепи управления.
Включение в работу параллельно включенных цилиндров 12 осуществлено электромагнитами двухпозиционного гидрораспре- делителя 61, подключенных контактом к источнику переменного тока, например частотой 50 Гц.
Причем рабочие полости каждого цилиндра 12 имеют по предохранительному клапану 62 для сброса жидкости при опре- 45 деленном давлении в сливную магистраль.
Телескопический цилиндр 8, гидродвигатели 16 и 20, цилиндры 12, гидродвигатели 48 щеток 6 и глдродвигатель 47 перемещения портала 1 подключены трубопроводами
40
кузов до соприкосновения закрепленного на щтанге 58 микропереключателя 57 с хребтовой балкой полувагона. Телескопический гидроцилиндр 8 останавливается в том случае, когда микропереключатель 57 замыкает параллельную ветвь нижней цепи управления верхнего электромагнита гидрораспределителя 53 и указанная цепь размыкается при обрабатывании кнопки 56, отключающей контакт 54. После этого программируемый контролер включает контакты, подающие напряжение на верхние электромагниты трехпозиционных гидрораспределителей 51 и 52, включающие в работу смонтированные на кронщтейнах 9 два гидродвигателя 48, вращающих щестернями 49 зубчатые колеса 50 на валах щеток 7. Затем программируемый контролер включает контакт датчика 2 и кнопку 70 и через датчик 21 управляет верхним электромагнитом гидрораспределителя 26. Гидродвигатель 20, закрепленный в вильчатом щарнире 6, поворачивает одну из щеток 7 относительно вертикальной оси 5. Вторая щетка 7 поворачивается аналогично закрепленным на другом вильчатом щарнире 6 гидродвигачерез соответствующие им гидрораспредели- 50 телем 20 при включенном гидрораспределители 26,37,38,46,51,52,53,61, предохрани-теле 37 от датчика 35 навстречу первой одтельный 63 и обратные 64 клапаны с фильтром 65 к масляному баку 67 и насосу 68, соединенному с валом электродвигателя. Пульт управления гидроприводом,,расположенный в кабине 69 управления портала, содержит программируемый контролер, подключенный к микроЭВМ «Электроника НЦ-31-01.
55
повременно или от нее в зависимости от составленной программы и расположения полостей гидродвигателя 37. Внутренняя вилка 18 поворачивается относительно внещ- ней вилки 19 в одну сторону от микропереключателя 25, вмонтированного на определенном угле S во внутренний ряд ламелей 23, и включения его подвижного подпружи0
Манипулятор работает следующим образом.
При подходе группы вагонов оператор в кабине 59 управления включает программируемый контролер и электродвигатель насоса 68. Жидкость перекачивается насосом 68 через выключенные гидрораспределители 26, 37, 38, 46, 51, 52, 53 и 61, предохранительный 63 и обратные 62 клапаны и фильтр 65 обратно в масляный бак 67. По заданной и отработанной вручную на данных типах полувагонах микроЭВМ программе программируемый контролер включает в определенном порядке контакты гидрораспределителей, а также кнопки 36 и 33, по5 дающих напряжение от источников постоян- например нескольких аккумуляторных батарей на верхний и нижний электромагнит гидрораспределителей 26,37,38, 46,51,52,53 и 61, управляющих работой гид- f, родвигателей 16,20,48, телескопического гидроцилиндра 8 и цилиндра 12. В положении I-I портала -1 производится очистка первой торцовой стены кузова. Для чего вертикально установленные щетки 7 телескопическим гидроцилиндром 8, раздвигаю- 5 щим при замкнутом контакте 54 и кнопке 56 телескопическое звено 3, опускаются в
5 дающих напряжение от источников постоян- например нескольких аккумуляторных батарей на верхний и нижний электромагнит гидрораспределителей 26,37,38, 46,51,52,53 и 61, управляющих работой гид- f, родвигателей 16,20,48, телескопического гидроцилиндра 8 и цилиндра 12. В положении I-I портала -1 производится очистка первой торцовой стены кузова. Для чего вертикально установленные щетки 7 телескопическим гидроцилиндром 8, раздвигаю- 5 щим при замкнутом контакте 54 и кнопке 56 телескопическое звено 3, опускаются в
5
0
5
0
кузов до соприкосновения закрепленного на щтанге 58 микропереключателя 57 с хребтовой балкой полувагона. Телескопический гидроцилиндр 8 останавливается в том случае, когда микропереключатель 57 замыкает параллельную ветвь нижней цепи управления верхнего электромагнита гидрораспределителя 53 и указанная цепь размыкается при обрабатывании кнопки 56, отключающей контакт 54. После этого программируемый контролер включает контакты, подающие напряжение на верхние электромагниты трехпозиционных гидрораспределителей 51 и 52, включающие в работу смонтированные на кронщтейнах 9 два гидродвигателя 48, вращающих щестернями 49 зубчатые колеса 50 на валах щеток 7. Затем программируемый контролер включает контакт датчика 2 и кнопку 70 и через датчик 21 управляет верхним электромагнитом гидрораспределителя 26. Гидродвигатель 20, закрепленный в вильчатом щарнире 6, поворачивает одну из щеток 7 относительно вертикальной оси 5. Вторая щетка 7 поворачивается аналогично закрепленным на другом вильчатом щарнире 6 гидродвига
повременно или от нее в зависимости от составленной программы и расположения полостей гидродвигателя 37. Внутренняя вилка 18 поворачивается относительно внещ- ней вилки 19 в одну сторону от микропереключателя 25, вмонтированного на определенном угле S во внутренний ряд ламелей 23, и включения его подвижного подпружипенного контакта подвижной частью 22 на внешний ряд ламелей 24. После (остановки гидродвигателя 20 в момент отключения кнонки 70 программируемый контролер вновь включает контакт и кнонку для питания катун1ки электромагнитного реле через размыкающие контакты и включения нижним электромагнитом гидрорасиределителя 37 в обратную сторону. Следующая остановка производится подвижной частью 22 размыканием верхней цепи управления конечного выключателя 27, установленного в кор- нусе датчика 21 в начальном положении отсчета.
При этом срабатывает кнонка 66 и контакт датчика 21 отключается. Щетки 7 сомкнуты и для повторной их раздвижки программируемый контроллер замыкает датчик 21 и включает кнопку 70 нижних цепей управления, имеющих замыкающие с выдержкой времени и включенные в параллель лемелям 23 контакты в электромагнитных реле. Питание от источника постоянного тока поступает на верхние электромагниты гидрораспределителей 26 и 37, которые верхними полостями включают гидродвигатели 20 в разные стороны или согласно заданной программы. После того как подвижная часть 22 сойдет с конечного выключателя 27 разомкнется замыкающий контакт и питание указанного магнита производится по замкнутым контактам ламелям 23.
При повороте рычагов 13 в вильчатых шарнирах 6 необходимо задать программой одновременное перемещение портала 1. Для этого при сдвижке щеток 7 ему необходимо плавно отойти от торцовой стены вагона на расстояние, равное L длине рычага 13 и габариту щетки, не нарушая контакта щеток 7 с очищаемой торцовой стеной (положение И-И). На то же расстояние должен приблизиться к указанной стене портал 1 во время раздвижки в стороны щеток 7 при очистке углов полувагона. В этом случае программируемый контроллер размыкает в электрической цепи направляющих 39 на расстоянии L параллельно включенный контакт, подающий питание от источника постоянного тока на катущку втулки 41. Подпружиненный штырь 40 выдвигается из втулки 41. Далее программируемый контроллер замыкает контакт и включает кнопку 30 в нижней цепи управления верхнего электромагнита гидрораспределителя 46. Вращаясь гидродвигатель 47 вместе с колесом портала 1, перемещает последний в сторону от торцовой стены вагона. В обратную сторону перемещение происходит после отключения контакта и кнопки 30 микропереключателем 43, ролик которого контактирует с выдвинутым на нужной позиции подпружиненным штырем 40. Микропереключатель 43 замыкает включенные в параллель свои другие контакты и после
вторичного включения программируемого контроллера контакта и кнопку 30 питание по верхней цепи управления поступает на нижний электромагнит гидрораспределителя 46.
После очистки одной стены полувагона вертикально установленными щетками 7 гидродвигатели 20 останавливаются при положении подвижных частей 22 датчиков 21 и 35 управления, при раздвинутых в од0 ну линию щетках 7. Портал 1 перемещается гидродвигателем 47 к другой стене полувагона, очищая при этом его боковые стены. Все установленные на направляющей 9 подпружиненные штыри 40 убраны во втулки 41 обмотки катушек, в которых подключены к источнику постоянного тока. Отключение нижней цепи управления верхнего электромагнита гидрораспределителя 46 производится закрепленным на передней части тележки портала 1 конечным выключателем
0 45 при взаимодействии с упором на одном конце направляющей 39. Обратный ход портала 1 ограничивается конечным выключателем 44, смонтированным на другом конце направляющей 39.
5 Очистка второй торцовой стены полувагона производится вращающимися, синхронно или асинхронно раздвигающимися в плане гидродвигателя 20 щетками 7 при аналогичном, как и в первом случае, подходе и уходе портала 1 на расстояние L,
0 необходимом для безопасной встречи щеток 7 в центре торцовой стены.
Затем портал 1 отходит от торцовой стены на расстояние, равное половине длины щетки 7 и устанавливается по середине первых двух крыщек люков. Для этого про5 граммируемый контроллер включает контакт и кнопку 30 и подает питание на нижний электромагнит гидрораспределителя 46 для вращения гидродвигателя 47 в обратную сторону. Остановка гидродвигателя 47
0 производится при его отключении во время кратковременного разрыва цепи и отключения контакта и кнопки 30 микропереключателем 43, ролик которого контактирует с выдвинутым из втулки 41 подпружиненным щтьфем 40 на требуемом расстоянии.
5 Очистка открытых крыщек люков и нижней обвязки полувагона производится горизонтально установленными щетками 7 (положение ill-П1).
г) Для этого программируемый контроллер включает соответствующий контакт и кнопку в цепи управления одного электромагнита трехпозипионного гидрораспределителя 38 и контролирует поворот по датчику 36, аналогичному датчику 21. Одновременный
поворот на 90° вокруг поперечной горизонтальной оси 4 осуществляется установленным в корпусе 14 гидродвигате 1ем 16 рычагов 17 вместе со щетками 7 относительно
10
Т-образного захвата 15. Затем звено 3 раздвигается телескопическим гидроцилиндром 8 и оиускает щетки 7 на очищаемые крышки люков.
Программируемый контроллер включает контакт 54 и кнопку 56 питания, поступает на верхний электромагнит гидрорас- предел ителя 53 через замкнутые контакты микропереключателя 57, катушку электромагнитного реле и размыкающие контакты. Остановка телескопического гидроцилиндра 8 происходит при контакте закрепленного на корпусе 14 конечного выключателя 59 с хребтовой балкой полувагона и срабатывании контакта 54 с кнопкой 56. Последующий подъем щеток 7 осуществляется при 5 подаче жидкости в телескопический гидроцилиндр 8 другой полостью гидрораспределителя 53 при повторном замыкании программируемым контроллером контакта 54 и включении Кнопки 33. Величина подъема ограничивается другим конечным выключателем 60, размыкающим контакты в цепи управления указанного гидрораспределителя 53. Одновременно с опусканием звена 3 производится раздвижка щеток 7 относи20
выключателями 59 и 60, а также вращения гидродвигателей 20 (положение V-V).
После очистки открытых крышек люков щетки 7 поворачиваются гидродвигателем 16 в обратную сторону при переключении датчиком 36 угла гидрораспределителя 40. По программе очищается вторая торцовая стена полувагона, концевым выключателем 44 отключается питание на трехпозиционном гидрораспределителе 46 и гидродвигатель 47 останавливается. Звено 3 поднимает щетки 7 из кузова полувагона. Дальнейщая очистка полувагонов может производиться на этом же месте с челночным способом или порталом 1, перемещающимся вдоль фронта очищаемых полувагонов по направляющей 39.
Качественная очистка загрязненных поверхностей полувагонов достигается при перекрывании обеими щетка.ми 6 зазоров под своими опорами за счет выполнения на их кронщтейнах 9 цилиндров 12 с колебательным движением подпружиненных поршней П. В этом случае цилиндры 12 подключены к двухпозиционному гидрораспределителю 3, включаемому по программе
тельно корпуса 14 поворотом рычагов 13 25 программируемого контроллера электро- по заданной программируемым контролле-магнитом через контакт гидрораспределиром программе ранее описанным способом.теля 6 в цепи переменного тока.
Каждая щетка 7 раздвигается гидродвига-Формула изобретения
телем 20 на угол, равный углу наклона каждой крыщки люка к вертикали, и управля- п ется датчиками 21 и 35 угла. Обратный подъем и сдвижка щеток 7 производится при реверсировании, т.е. переключении в обратную сторону соответствующих трехпозици- онных гидрораспределителей 26 и 53 (положение ly-IV).
35
1. Манипулятор для очистки железнодорожных полувагонов, содержащий портальную раму с установленной на ней с возможностью перемещения в горизонтальной плоскости тележкой, несущей телескопическое вертикальное звено с двумя поворотными в вертикальной плоскости рычагами, связанными с рабочими органами, отличающийся тем, что, с -целью расширения функциональных возможностей, каждый из рычагов соединен с вертикальным звеном дополнительным горизонтальным рычагом, установлен1. Манипулятор для очистки железнодорожных полувагонов, содержащий портальную раму с установленной на ней с возможностью перемещения в горизонтальной плоскости тележкой, несущей телескопическое вертикальное звено с двумя поворотными в вертикальной плоскости рычагами, связанными с рабочими органами, отличающийся тем, что, с -целью расширения функциональных возможностей, каждый из рычагов соединен с вертикальным звеном дополнительным горизонтальным рычагом, установленПо окончании очистки люков они переставляются порталом 1 на новую позицию до отключения микропереключателя следую- щ.им подпружиненным щтырем 40 напротив
вторых попарно симметричных хребтовой 40 ,ным с возможностью поворота приводом балки наклонных крыщек вагона и т.д. При относительно продольной оси этих рычагов, этом на промежуточных позициях может2. Манипулятор по п. 1, отличающийся
производиться очистка поперечных горизон-тем, что каждый рабочий орган выполнен
тальных балок полувагона по отлаженнойв виде приводной щетки, закрепленной на
дс кронштейнах, которые соединены с
программе программируемого контроллера для требуемых перемещений телескопического гидроцилиндра 8 между конечными
поршнем гидроцилиндра, закрепленного на конце каждого рычага перпендикулярно его оси.
0
5
0
выключателями 59 и 60, а также вращения гидродвигателей 20 (положение V-V).
После очистки открытых крышек люков щетки 7 поворачиваются гидродвигателем 16 в обратную сторону при переключении датчиком 36 угла гидрораспределителя 40. По программе очищается вторая торцовая стена полувагона, концевым выключателем 44 отключается питание на трехпозиционном гидрораспределителе 46 и гидродвигатель 47 останавливается. Звено 3 поднимает щетки 7 из кузова полувагона. Дальнейщая очистка полувагонов может производиться на этом же месте с челночным способом или порталом 1, перемещающимся вдоль фронта очищаемых полувагонов по направляющей 39.
Качественная очистка загрязненных поверхностей полувагонов достигается при перекрывании обеими щетка.ми 6 зазоров под своими опорами за счет выполнения на их кронщтейнах 9 цилиндров 12 с колебательным движением подпружиненных поршней П. В этом случае цилиндры 12 подключены к двухпозиционному гидрораспределителю 3, включаемому по программе
5 программируемого контроллера электро- магнитом через контакт гидрораспредели
1. Манипулятор для очистки железнодорожных полувагонов, содержащий портальную раму с установленной на ней с возможностью перемещения в горизонтальной плоскости тележкой, несущей телескопическое вертикальное звено с двумя поворотными в вертикальной плоскости рычагами, связанными с рабочими органами, отличающийся тем, что, с -целью расширения функциональных возможностей, каждый из рычагов соединен с вертикальным звеном дополнительным горизонтальным рычагом, установленкронштейнах, которые соединены с
поршнем гидроцилиндра, закрепленного на конце каждого рычага перпендикулярно его оси.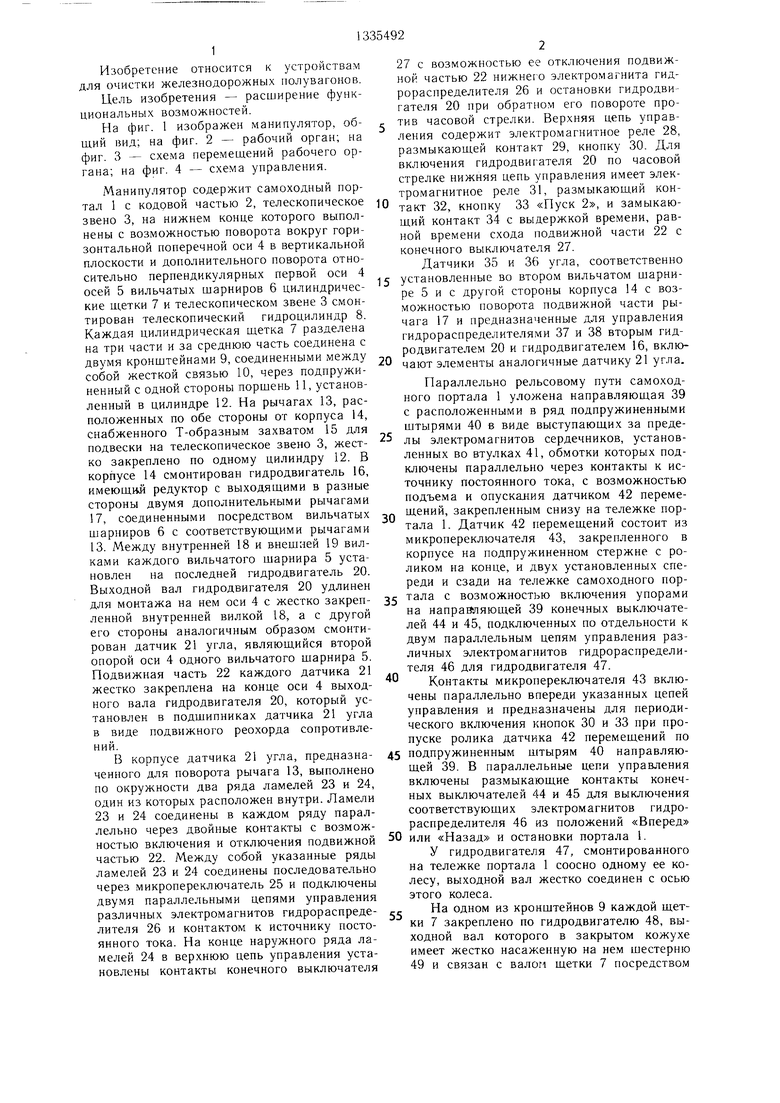
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ С ДВУХСКАТНЫМ ПОЛОМ | 1989 |
|
RU2026215C1 |
| Устройство для выгрузки сыпучих грузов из вагонов | 1987 |
|
SU1562266A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВЕРХНЕЙ ОБВЯЗКИ ПОЛУВАГОНОВ | 2023 |
|
RU2821200C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВЕРХНЕЙ КРОМКИ ПОЛУВАГОНОВ | 2012 |
|
RU2512129C1 |
| Устройство для очистки железнодорожных полувагонов | 1983 |
|
SU1260276A1 |
| Манипулятор | 1990 |
|
SU1764983A1 |
| Стенд для испытания дискретных распределителей с рычажным управлением | 2023 |
|
RU2823755C1 |
| АВТОМОБИЛЬНЫЙ ТРЕНАЖЕР | 1971 |
|
SU310288A1 |
| Устройство для очистки полувагонов от остатков сыпучих грузов | 2022 |
|
RU2784124C1 |
Изобретение относится к устройствам для очистки полувагонов. Цель изобретения - расширение функциональных возможностей. Манипулятор содержит рабочий орган в виде двух симметрично смонтированных щеток 7 на вертикальном телескопическом звене 3, который установлен на самоходном портале 1. Щетки 7 смонтированы с возможностью очистки люков, торцовых и боковых стен полувагона. Управление производится от микроэвм программируемым контроллером по заданной программе. При установке полувагона на позицию очистки оператор вводит внутрь кузова щетки и по заданной программе производится очистка полувагона. 1 з.п. ф-лы, 4 ил. сл со со СП N( со ts5 ///////// ////// /W ////// ///////// /// /// . 1
16
| Манипулятор | 1978 |
|
SU770784A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
