Изобретение относится к гибридной аналоговой вычислительной технике предназначено для автоматическоо решения задач оптимального по быстродействию управления системами с аспределенными параметрами при наичии ограничений на выходные кооринаты .
Цель изобретения - повышение точости.
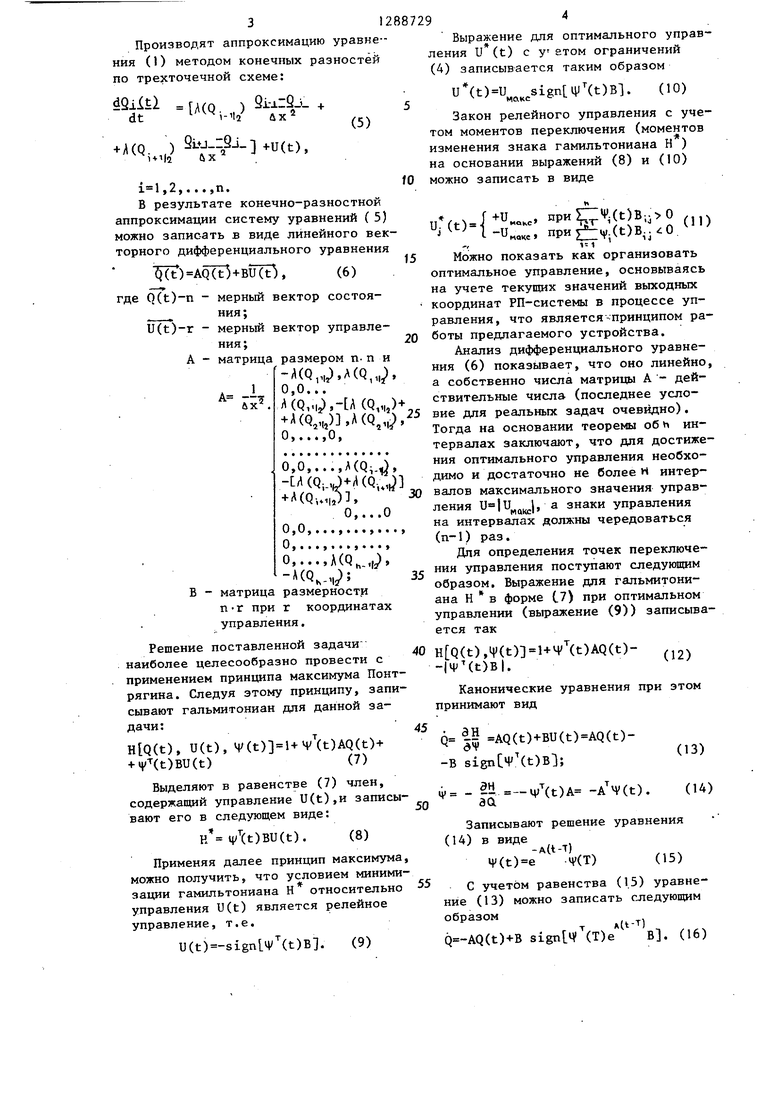
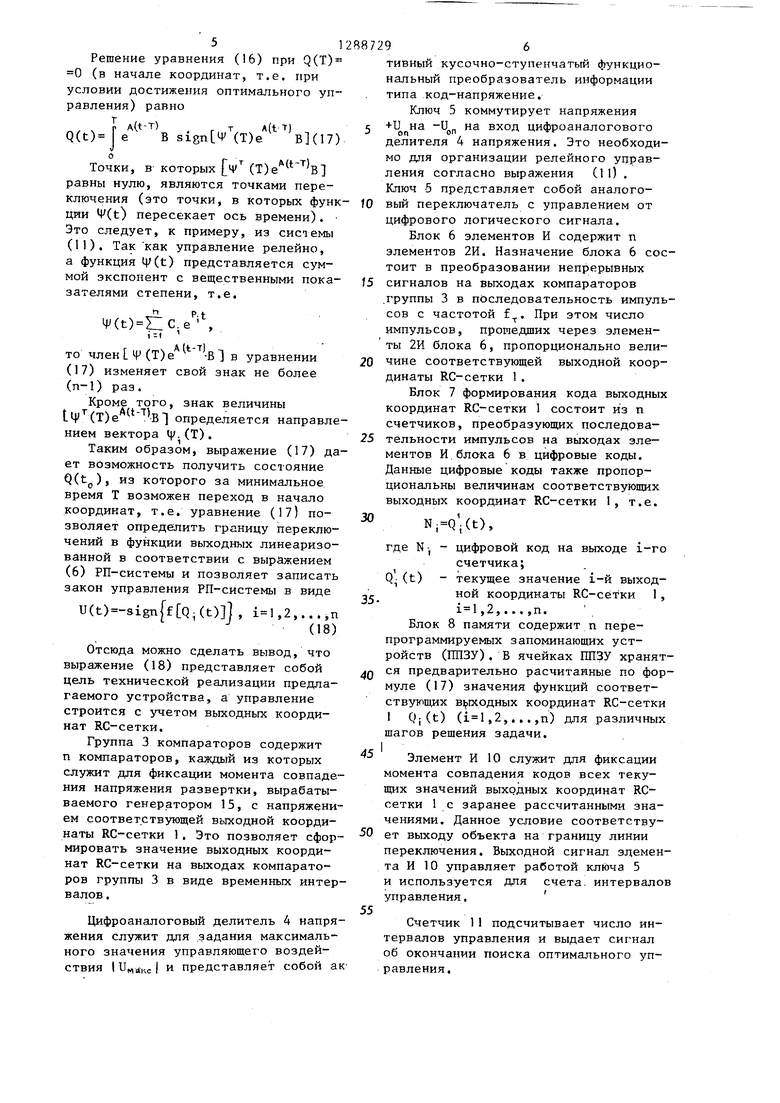
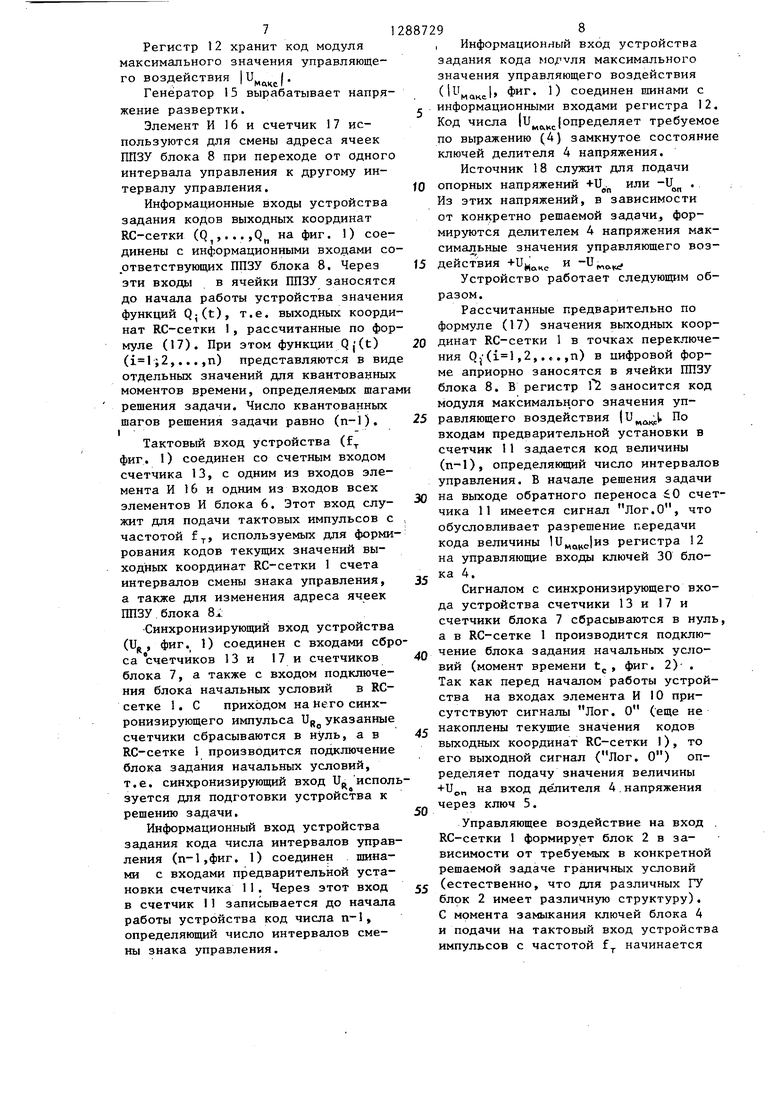
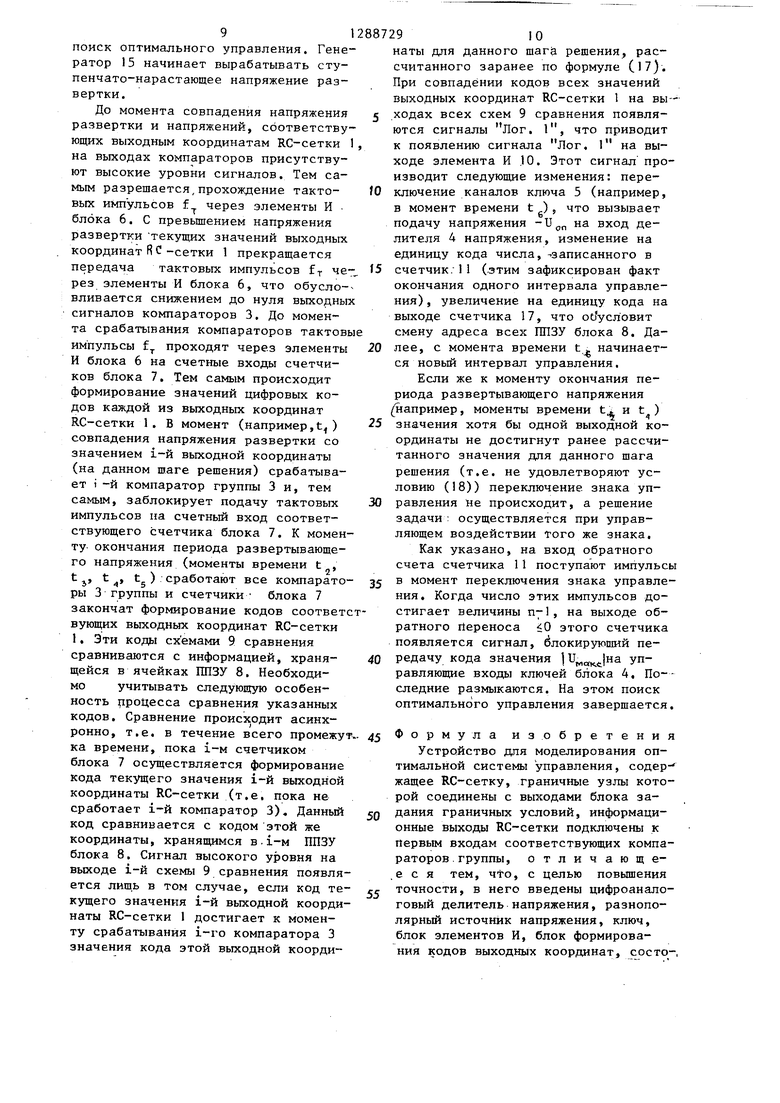
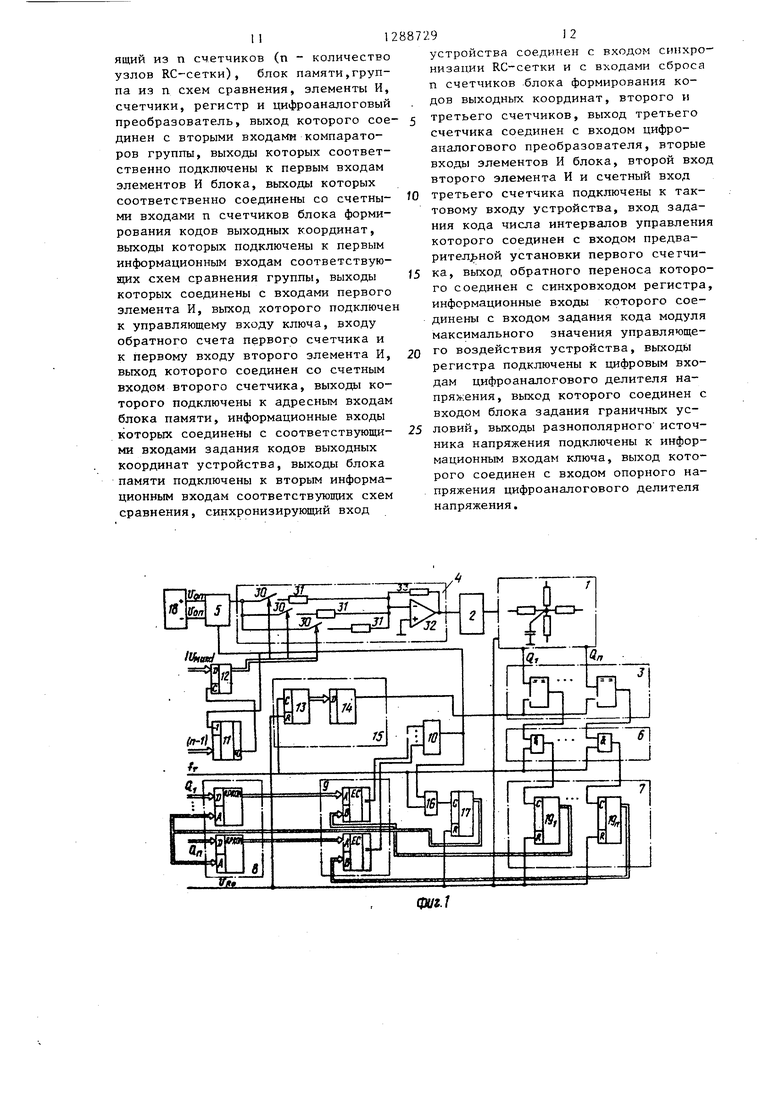
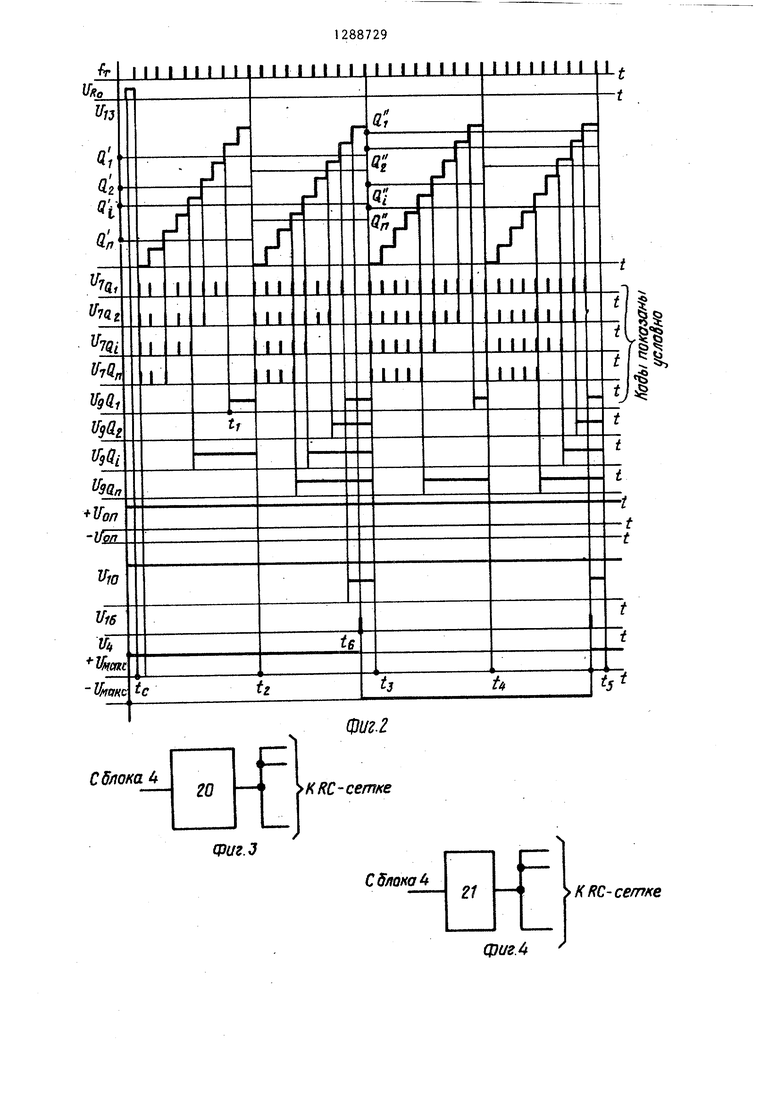
На фиг. 1 представлена блок-схеа устройства; на фиг. 2 - временные иаграммы работы устройства; на фиг. 3-7 - структуры блока граничных условий.
Устройство содержит RC-сетку 1 вместе с блоком задания начальных условий,блок 2 задания граничных условий, группу 3 компараторов, цифро- аналоговый делитель 4 напряжения, ключ 5, блок 6 элементов И, блок 7 формирования кодов выходных координат, блок 8 памяти, группу изW схем 9 сравненияJ первый элемент И 10, первый счетчик 11, регистр 12, третий счетчик 13, цифроаналоговый преобразователь 14 (ЦАП).Совокупность счетчика 13 и ЦАП 14 образуют цифровой генератор 15. Устройство также включает второй элемент И 16, второй счетчик 17, разнополярный источ- ник 18 напряжения, блок 7 включает п счетчиков 19.
С помощью блока 2 можно задавать в RC-сетку 1 граничные условия I-IV рода (ГУ 1-IV). Блок 2 для задания ГУ1 (фиг. 3) представляет собой источник 20 напряжения, задающий потенциал граничных точек сеточной модели; блок 2 для защиты ГУН (фиг.4) представляет собой источник 2 тока, моделирующий поток q для граничных точек сеточной модели; блок 2 для задания ГУЩ (фиг. 5) представляет собой последовательное соединение источника 22 тока и резистивной матрицы 23, резисторы которой моделируют коэффициент теплообмена сС СВт/м блок 2 для задания ryiV (фиг. 6), например, для случая неидеального контакта между поверхностями соприкасающихся тел представляет собой резистивную матрицу 24, резисторы которой служат для моделирования термического контактного сопротивления К.м град/ВтТ.
Во всех перечисленных случаях задания ryi-IV входным сигналом для блока 2 служит сигнал с вь(хода цифроаналогового делителя 4 напряжения (фиг. 1). При этом для указанных блоков, содержащих управляемые источники тока или напряжения, этот сигнал является сигналом управления для соответствующих источников.
Функциональная схема блока 2 для моделирования лучистого теплообмена представлена на фиг. 7, Она позволя- ет технически реализовать процесс лучистого теплообмена и включает пассивные кусочно-линейные цифро- аналоговые функциональные преобразователи 25 и 26 информации, сумматор 5 27 с одним инвертирующим и одним неинвертирующим входами, управляемый источник 28 тока, регистр 29.
Цифроаналоговый делитель 4 напряжения включает ключи 30, резисторы 31, усилитель 32 и резистор 33 обратной связи.
Принцип работы устройства основан на следующих математических зависимостях. Рассматривают эти зависимости для случая, когда решается задача оптимального управления процессом нагрева металлической заготовки::при лучистом теплообмене. Пусть математическая модель процесса теплообмена 0 описывается следующим дифференциальным уравнением в частных производных (для простоты рассматривают одномер- - ный случай):
c(Q) д(д) 3gix,
0
5
5
0
at
5х
Эх
ГО.
LO
xiD(I)
t Т, где И (Q) - коэффициент теплообмена
материала заготовки. Начальные и граничные условия заданы в следующем виде:
д(.д) (t)l -tQ(0,t)f};
О X
45
Шз.1 0- Эх
(2)
Q.(x,0)Q.
Ставится задача перехода к некоторому целевому состоянию при минимизации функционала, характериз.ующего степень достижения этой цели: т л
(x,t)} f(l)dxdt. (3) J j
0,0.
При этом на управление накладывается ограничение
lUli и
Макс
(4)
31288729
Производят аппроксимацию уравнения () методом конечных разностей по трехточечной схеме:
(Q ,-..
QiuiQj
- - +
лх
+A(Q..,.) (t),
i + l|2
UX
,2,...,n.
В результате конечно-разностной аппроксимации систему уравнений ( 5) можно записать в виде линейного векторного дифференциального уравнения
/5
)АоШ+ВиШ.
где Q(t)-n - мерный вектор состояния;
U(t)-r - мерный вектор управления;А - матрица размером п. п и
-A(Q,,,.A(Q,,,, и J и, «
, лх
оптимальное управление, основываясь на учете текущих значений выходных координат РП-системы в процессе управления, что является-. Принципом ра- 20 боты предлагаемого устройства.
Анализ дифференциального уравнения (6) показывает, что оно линейно, а собственно числа матрицы А - действительные числа (последнее усло(Q,.ij),(Q,,,,)+,. .
KQ 1 ) А (Q ) реальных задач очевидно). О . Тогда на основании теоремы об h интервалах заключают, что для достижеП п xfn ния оптимального управления необхо- и,и,... ,л
-t/ (О. j+A(Q )1 димо и достаточно не более и интер- + A(Q-, ; 30 валов максимального значения управления ., а знаки управления на интервалах должны чередоваться (п-1) раз.
Для определения точек переключении управления поступают следующим образом. Выражение для гальмитони- ана Н в форме С7) при оптимальном
О,...О
0,0,...,...,.. О,
o....,A(Q,.,,p.
-(
В - матрица размерности
пг при г координатах управления.
35
управлении (выражение (9)) записывается так
Решение поставленной задачи- наиболее целесообразно провести с применением принципа максимума Понт- рягина. Следуя этому принципу, записывают гальмитониан для данной задачи:
(t), U(t), M(t) l+V(t)AQ(t)+ i-4 (t)BU(t)(7)
Выделяют в равенстве (7) член, содержащий управление U(t),H записывают его в следующем виде:
R 4/(:t)BU(t).(8)
Применяя далее принцип максимума, можно получить, что условием минимизации гамильтониана Н относительно управления U(t) является релейное управление, т.е.
U(t)-sign 4/ (t)Bl. (9)
Выражение для оптимального управления и (t) с У атом ограничений (Д) записывается таким образом
U(t)U (t)B. (10)
Закон релейного управления с учетом моментов переключения (моментов изменения знака гамильтониана Н ) на основании выражений (8) и (10) fO можно записать в виде
и(),. при Ч ДОВ; 0 ( ,)
1-и«окс. npHj; 4 :(t)B..O/
-,1 1
15 Можно показать как организовать
оптимальное управление, основываясь на учете текущих значений выходных координат РП-системы в процессе управления, что является-. Принципом ра- 20 боты предлагаемого устройства.
Анализ дифференциального уравнения (6) показывает, что оно линейно, а собственно числа матрицы А - действительные числа (последнее усло,. .
35
управлении (выражение (9)) записывается так
40 (t),H (t) l+4 (t)AQ(t)- , „. )B|.
Канонические уравнения при этом принимают вид
ан
Q |S AQ(t)+BU(t)AQ(t)- -В (t)Bl;
- )A -A4(t).
ф - §Н
за
(13)
(14)
Записывают решение уравнения (14) в виде
-A(t-T)
iH(t)e H-d) (15)
С учетом равенства (1.5) уравнение (13) можно записать следующим образом
т Alt-T)
(t)-HB signtM (Т)е В. (16)
Решение уравнения (16) при Q(T) 0 (в начале координат, т.е. при условии достижения оптимального управления) равно
Q(t) (Т)(17)
Точки, в которых ч (Т) равны нулю, являются точками переключения (это точки, в которых функции V(t) пересекает ось времени). Это следует, к примеру, из сисаемы (11). Так как управление релейно, а функция V(t) представляется суммой экспонент с вещественными показателями степени, т.е.
р t 4J(t) i:c.e
i-t
ТО член 4 (Т)е -В в уравнении (17) изменяет свой знак не более (п-1) раз.
Кроме того, знак величины llV(T)e определяется направлением вектора Ц/. (Т).
Таким образом, выражение (17) дает возможность получить сосюяние Q(tp), из которого за минимальное время Т возможен переход в начало координат, т.е. уравнение (17) позволяет определить границу переключений в функции выходных линеаризованной в соответствии с выражением (6) РП-системы и позволяет записать закон управления РП-системы в виде
U(t)-signff Q.(t), ,2,...,n
(18)
Отсюда можно сделать вывод, что выражение (18) представляет собой цель технической реализации предлагаемого устройства, а управление строится с учетом выходных координат RC-сетки.
Группа 3 компараторов содержит п компараторов, каждый из которых служит для фиксации момента совпадения напряжения развертки, вырабатываемого генератором 15, с напряжением соответствующей выходной координаты RC-сетки 1. Это позволяет сформировать значение выходных координат НС-сетки на выходах компараторов группы 3 в виде временных интервалов .
Цифроаналоговый делитель 4 напряжения служит для задания максимального значения управляющего воздействия I и представляет собой а
тивный кусочно-ступенчатый функциональный преобразователь информации типа код-напряжение.
Ключ 5 коммутирует напряжения +U на -и „ на вход цифроаналогового
ОП ОП
делителя 4 напряжения. Это необходимо для организации релейного управления согласно выражения (1) . Ключ 5 представляет собой аналоговый переключатель с управлением от цифрового логического сигнала.
Блок 6 элементов И содержит п элементов 2И. Назначение блока 6 состоит в преобразовании непрерывных
сигналов на выходах компараторов
.группы 3 в последовательность импульсов с частотой f. При этом число импульсов, проиедших через элемен- ты 2И блока 6, пропорционально величине соответствующей выходной координаты RC-сетки 1.
Блок 7 формирования кода выходных координат RC-сетки 1 состоит из п счетчиков, преобразующих последова-
тельности импульсов на выходах элементов И блока 6 в цифровые коды. Данные цифровые коды также пропорциональны величинам соответствующих выходных координат RC-сетки 1, т.е.
NrQ i(t),
где N , - цифровой код на выходе i-ro
счетчика;
Q .; (t) - текущее значение 1-й выходной координаты RC-cёtки 1, ,2,...,п. Блок 8 памяти содержит п перепрограммируемых запоминающих устройств (ППЗУ). Б ячейках ПИЗУ хранят- ся предварительно расчитанные по формуле (17) значения функций соответствующих В1; 1ходных координат RC-сетки I QJ(t) (,2,...,п) для различных шагов решения задачи.
I Элемент И 10 служит для фиксации
момента совпадения кодов всех текущих значений выходных координат RC- сетки 1с заранее рассчитанными значениями. Данное условие соответству- ет выходу объекта на границу линии переключения. Выходной сигнал элемента И 1 О управляет работой ключа 5 и используется для счета, интервалов управления.
Счетчик 11 подсчитывает число интервалов управления и выдает сигнал об окончании поиска оптимального управления.
Регистр 12 хранит код модуля максимального значения управляющего воздействия | U |.
Генератор 15 вырабатывает напряжение развертки.
Элемент И 16 и счетчик 17 используются для смены адреса ячеек ППЗУ блока 8 при переходе от одного интервала управления к другому интервалу управления.
Информационные входы устройства задания кодов выходных координат RC-сетки (Р,,...,Р„ на фиг. 1) соединены с информационными входами со- .ответствутощих ППЗУ блока 8. Через эти входы в ячейки ППЗУ заносятся до начала работы устройства значения функций Q;(t), т.е. выходных координат RC-сетки 1, рассчитанные по формуле (17). При этом функции Q ,(t)
(,...,п) представляются в вид отдельных значений для квантованных моментов времени, определяемых шага решения задачи. Число квантованных
шагов решения задачи равно (п-1). Тактовый вход устройства (f
фиг, 1) соединен со счетным входом счетчика 13, с одним из входов элемента И 16 и одним из входов всех элементов И блока 6. Этот вход слу- жит для подачи тактовых импульсов с частотой f-r, используемых для формирования кодов текущих значений выходных координат RC-сетки 1 счета интервалов смены знака управления, а также для изменения адреса ячеек ППЗУ,блока 8i
Синхронизирующий вход устройства (и, фиг. 1) соединен с входами сбрса счетчиков 13 и 17 и счетчиков блока 7, а также с входом подключения блока начальных условий в RC- сетке 1. С приходом на него синхронизирующего импульса и указанные счетчики сбрасываются в нуль, а в RC-сетке 1 производится подключение блока задания начальных условий, т.е. синхронизирующий вход U исползуется для подготовки устройства к решению задачи.
Информационный вход устройства задания кода числа интервалов управления (п-1,фиг. 1) соединен шинами с входами предварительной установки счетчика 1 1 . Через этот вход в счетчик I1 записьшается до начала работы устройства код числа п-1, определяющий число интервалов смены знака управления,
г
5
0
5
5
0 5 0
5
, Информационный вход устройства задания кода максимального значения управляющего воздействия (|и„о1 1, фиг. 1) соединен тинами с информационными входами регистра 12. Код числа (u lопределяет требуемое по выражению (4) замкнутое состояние ключей делителя 4 напряжения.
Источник 18 служит для подачи опорных напряжений +U. или -U . Из этих напряжений, в зависимости от кон1 :ретно решаемой задачи, формируются делителем 4 напряжения максимальные значения управляющего воздействия +иц и -и
Устройство работает следующим образом.
Рассчитанные предварительно по формуле (17) значения выходных координат RC-сетки 1 в точках переключения Qj(,2,...,п) в цифровой форме априорно заносятся в ячейки ППЗУ блока 8. В регистр 15 заносится код модуля максимального значения управляющего воздействия (и. По входам предварительной установки в счетчик 11 задается код величины (п-1), определяющий число интервалов управления. В начале решения задачи на выходе обратного переноса 0 счетчика 11 имеется сигнал Лог.О, что обусловливает разрешение передачи кода величины 1иц,|(,1из регистра 12 на управляющие входы ключей 30 блока 4.
Сигналом с синхронизирующего входа устройства счетчики 13 и 17 и счетчики блока 7 сбрасываются в нуль, а в RC-сетке 1 производится подключение блока задания начальных условий (момент времени t, фиг. 2)- . Так как перед началом работы устройства на входах элемента И 10 присутствуют сигналы Лог. О (еще не накоплены текущие значения кодов выходных координат RC-сетки I), то его выходной сигнал (Лог. О) определяет подачу значения величины +Up на вход делителя 4.напряжения через ключ 5.
Управляющее воздействие на вход . RC-сетки 1 формирует блок 2 в зависимости от требуемых в конкретной решаемой задаче граничных условий (естественно, что для различных ГУ блок 2 имеет различную структуру). С момента замыкания ключей блока 4 и подачи на тактовый вход устройства импульсов с частотой f начинается
поиск оптимального управления. Генератор 15 начинает вырабатывать ступенчато-нарастающее напряжение развертки.
До момента совпадения напряжения развертки и напряжений, соответствующих выходным координатам RC-сетки на выходах компараторов присутствуют высокие уровни сигналов. Тем самым разрешается,прохождение такто- вых импульсов f через элементы И блока 6, С превьшением напряжения развертки текущих значений выходных координат R С-сетки 1 прекращается передача тактовых импульсов fт че рез элементы И блока 6, что обусловливается снижением до нуля выходных сигналов компараторов 3, До момента срабатывания компараторов тактовы импульсы f проходят через элементы И блока 6 на счетные входы счетчиков блока 7. Тем самым происходит формирование значений цифровых кодов каждой из выходных координат RC-сетки 1. В момент (например,t) совпадения напряжения развертки со значением i-й выходной координаты (на данном шаге решения) срабатывает i -и компаратор группы 3 и, тем самым, заблокирует подачу тактовых импульсов па счетный вход соответствующего счетчика блока 7, К моменту окончания периода развертывающего напряжения (моменты времени t , t J, t , t ) сработают все компарато- ры 3 группы и счетчики блока 7 закончат формирование кодов соответсвующих выходных координат RC-сетки 1. Эти коды схемами 9 сравнения сравниваются с информацией, храня- щейся в ячейках ППЗУ 8, Необходимо учитывать следующую особенность fipouecca сравнения указанных кодов. Сравнение происходит асинхронно, т,е. в течение всего промежут ка времени, пока i-м счетчиком блока 7 осуществляется формирование кода текущего значения i-й выходной координаты RC-сетки (т,е, пока не сработает i-й компаратор 3), Данный код сравнивается с кодом этой же координаты, хранящимся в.i-м ППЗУ блока 8, Сигнал высокого уровня на выходе i-й схемы 9 сравнения появляется лищь в том случае, если код те- кущего значения i-й выходной координаты RC-сетки 1 достигает к моменту срабатывания i-ro компаратора 3 значения кода этой выходной координаты для данного щага решения, рассчитанного заранее по формуле (17). При совпадении кодов всех значений выходных координат RC-сетки 1 на выходах всех схем 9 сравнения появляются сигналы Лог, 1, что приводит к появлению сигнала Лог, 1 на выходе элемента И .10, Этот сигнал производит следующие изменения: переключение каналов ключа 5 (например, в момент времени t g), что вызывает подачу напряжения на вход делителя 4 напряжения, изменение на единицу кода числа, записанного в счетчик; 11 (.этим зафиксирован факт окончания одного интервала управления) , увеличение на единицу кода на выходе счетчика 17, что оо усл овит смену адреса всех ППЗУ блока 8, Далее, с момента времени t начинается новьш интервал управления.
Если же к моменту окончания периода развертывающего напряжения (напркмер, моменты времени ti и t ) значения хотя бы одной выходной координаты не достигнут ранее рассчитанного значения для данного шага решения (т,е, не удовлетворяют условию (18)) переключение знака управления Не происходит, а решение задачи : осуществляется при управляющем воздействии того же знака. Как указано, на вход обратного счета счетчика 11 поступают импульс в момент переключения знака управления. Когда число этих импульсов достигает величины п-1, на выходе обратного itepeHOca 0 этого счетчика появляется сигнал, блокирующий передачу кода значения | У равляющие входы ключей блока 4. Последние размыкаются. На этом поиск оптимального управления завершается
Формула изобретени
Устройство для моделирования оптимальной системы управления, содер жащее RC-сетку, граничнь1е узль: которой соединены с выходами блока задания граничных условий, информационные выходы RC-сетки подключены к Первым входам соответствующих компараторов . группы, отличающе- .8 с я тем, что, с целью повьщгения точности, в него введены цифроанало говый делитель напряжения, разнопо- лярный источник напряжения, ключ, блок элементов И, блок формирования кодов выходных координат, состо
ящий из п счетчиков (п - количество узлов RC-сетки), блок памяти,группа из п схем сравнения, элементы И, счетчики, регистр и цифроаналоговый преобразователь, выход которого сое динен с вторыми входами компараторов группы, выходы которых соответственно подключены к первым входам элементов И блока, выходы которых соответственно соединены со счетными входами п счетчиков блока формирования кодов выходных координат, выходы которых подключены к первым информационным входам соответствующих схем сравнения группы, выходы которых соединены с входами первого элемента И, выход которого подключе к управляющему входу ключа, входу обратного счета первого счетчика и к первому входу второго элемента И, выход которого соединен со счетным входом второго счетчика, выходы которого подключены к адресным входам блока памяти, информационные входы которых соединены с соответствующими входами задания кодов выходных координат устройства, выходы блока памяти подключены к вторым информационным входам соответствующих схем сравнения, синхронизирующий вход
0
5
устройства соединен с входом синхронизации RC-сетки и с входами сброса п счетчиков блока формирования кодов выходных координат, второго и третьего счетчиков, выход третьего счетчика соединен с входом цифро- аналогового преобразователя, вторые входы элементов И блока, второй вход второго элемента И и счетный вход третьего счетчика подключены к тактовому входу устройства, вход задания кода числа интервалов управления которого соединен с входом предва- рителдьной установки первого счетчика, выход обратного переноса которого соединен с синхровходом регистра, информационные входы которого соединены с входом задания кода модуля максимального значения управляющего воздействия устройства, выходы регистра подключены к цифровым входам цифроаналогового делителя напряжения, выход которого соединен с входом блока задания граничных ус- 5 ловий, выходы разнополярного источника напряжения подключены к информационным входам ключа, выход которого соединен с входом опорного напряжения цифроаналогового делителя напряжения.
0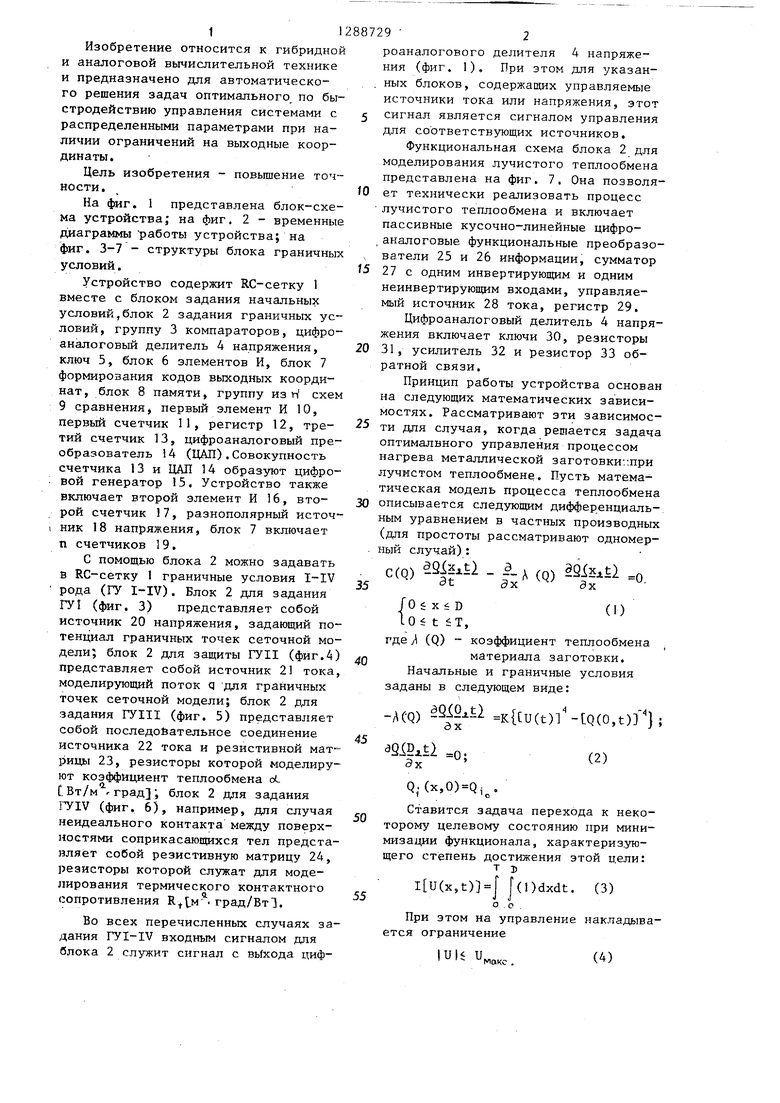
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для моделирования оптимальной системы управления | 1984 |
|
SU1254432A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1270779A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU970397A1 |
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Сеточная модель | 1984 |
|
SU1260981A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для решения обратной задачи теплопроводности | 1988 |
|
SU1522248A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU1023353A2 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1249549A1 |
Изобретение относится к гибридной и аналоговой вычислительной технике. Цель изобретения - повьшение точности. Указанная цель достигается введением в устройство цифроаналого- вого делителя напряжения, разнополярного источника напряжения, ключа, блока элементов, блока формирования кодов выходных координат, блока памяти, группы схем сравнения, элементов И, счетчиков, регистра и цифро- аналогового преобразователя. Поиск оптимального управления осуществляется за (п-1) интервалов управления (смены знака управления). При этом . движение системы реализуется в виде линии в п-мерном пространстве координат состояния (или фазовой траектории) , Смена интервала управления происходит при выходе изображающей точки системы на линию переключения. Координаты изображающей точки системы формируются в результате интегрирования исходньк дифференциальных уравнений, описывающих исследуемый процесс. 7 ил. (Л с: ю 00 сх | ю
С блока и
20
к КС-сетке
Фаг.д
CS/ioKa
KRC-cerrtf(e
фиг4
С блока 4
гг
2Z
(Риг.5
С&юка
/5
г-О
Составитель И.Дубинина Редактор Н.Бобкова Техред М.Ходанич Корректор Т.Колб
Заказ 7811/49 Тираж 694Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ККС сетке
CSflOKu
2
К PC-сетке
иг.6
21
г$
ь
k
. J
| Устройство для моделирования замкнутых распределенных систем управления | 1977 |
|
SU693399A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования оптимальной системы управления | 1981 |
|
SU970397A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
