1
Изобретение относится к машиностроению и может быть использовано в станках с программным управлением.
Целью изобретения является повышение точности и уменьшение габаритов устройства.
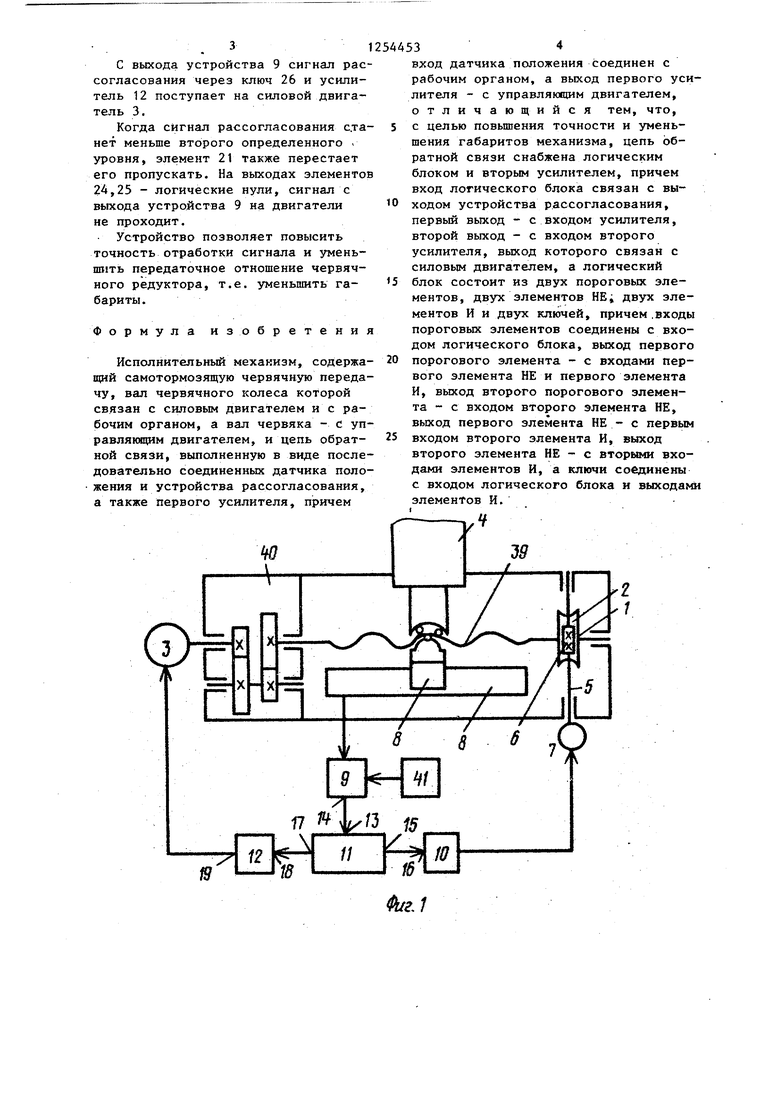
На фиг.1 изображена схема устройства; на фиг.2 - схема логического блока.
Исполнительный механизм содержит самотормозящую червячную передачу, вал 1 червячного колеса 2 которой связан с силовым двигателем 3 и с рабочим органом 4, а вал 5 червяка 6 - с управляющим двигателем 7, и цепь обратной связи, выполненную в виде последовательно соединенных датчика 8 положения и устройства 9 рассогласования, а также усилителя 10, причем вход датчика положения соединен с рабочим органом 4, а выход усилителя 10 - с управляющим двигателем 7.
Цепь обратной связи снабжена логическим блоком 11 и вторым усилителем 12, причем вход 13 логического блока 11 связан с выходом 14 устройства 9 рассогласования, первьй выход 15 - с входом 16 усилителя 10, второй выход 17 - с входом 18 второго усилителя 12, выход 19 которого связан с силовым двигателем 3.
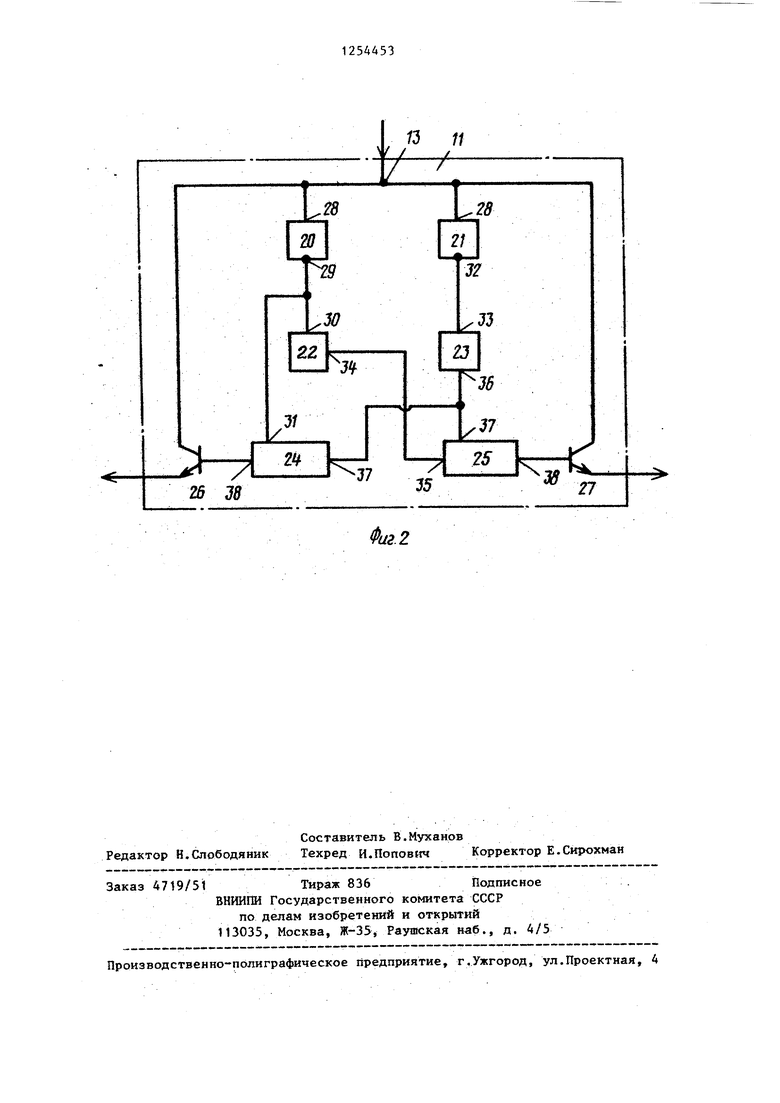
Логический блок 11 состоит из двух пороговых элементов 20 и 21,
10
15
чиком 41, связанным с устройством 9 рассогласования.
Механизм работает следуюпщм образом. Силовой двигатель 3 вьркимает всю кинематическую цепь 40,39,2 на червяк 6, как на жесткий упор. При включении управляющего двигателя 7 червяк 6 работает в режиме отторма- живания, управляя положением и скоростью рабочего органа 4. Датчик 8 контролирует положение рабочего органа 4 и подает сигнал, соответствующий этому положению, на устройство 9 рассогласования. Последнее формирует сигнал рассогласования между заданием (сигнал задатчика 41) и отработкой (сигнал датчика 8), который через логический блок 11 и первый усилитель 10 поступает на управляющий двигатель 7.
Когда сигнал рассогласования станет меньше некоторой критической величины, соответствующей зоне нечувствительности, двигатель 7 и червяк 6 остановятся, остановят всю кинематическую цепь 40,39,2 и рабочий орган 4. Сигнал рассогласования, формируемый устройством 9 перестает изменяться. Этот факт используется логическим блоком 11 для подачи сигнала рассогласования через второй усилитель 12 на силовой двигатель 3.
Последний, увеличивая натяг кинематической цепи 40,39,2, управляет
20
25
30
тает следующим образом.
Пусть сигнал рассогласования будвух элементов НЕ 22 и 23, .двух зле- 35 (ее деформацией и обеспечивает отра- ментов И 24, 25 и двух ключей 26 и ботку задания с высокой точностью. 27, причем входы 28 пороговых элемен- При этом логический блок 11 рабо- тов 20 и 21 соединены с входом 13 логического блока 11, выход 29 первого порогового элемента 20 - с входами 40 дет высокого уровня. .Тогда на выхо- 30, 31 первого элемента НЕ 22 и пер- дах элементов 20 и 21 будут логичес- вого элемента И 24, выход 32 второго порогового элемента 21 - с входом 33 второго элемента НЕ, выход 34 первого
45
элемента НЕ 22 - с первым входом 35 второго элемента И, выход 36 второго элемента НЕ - с вторыми входами 37 элементов И 24, 25, а ключи 26 и 27 соединены с входом 13 логического блока 11 и выходами 38 элементов И 24 и 25. Вал 1 червячного колеса 2, связан с силовым двигателем 3 через ходовой винт 39 и редуктор 40, рабочий орган 4 и датчик 8 положения связаны с ходовым винтом 39 и перемещаются синхронно вдоль него при его вращении. Необходимое перемещение рабочего органа задается задат50
55
кие нули. На выходе элемента 24 - логический нуль. На выходе элементов 22 и 23 - логические единицы и, следовательно, на выходе элемента 25 - также логическая единица.
Выходной сигнал устройства 9 че- .рез ключ 27 первый усилитель 10 проходит на управляющий двигатель 7.
Когда сигнал рассогласования уменьшается до некоторого определенного уровня, элемент 20 перестает его пропускать и, следовательно, у него на вьЬсоде будет лргическая единица. На выходе элемента 24 - единица, на выходе элемента 22 - нуль, на выходе элемента 25 - нуль.
10
15
254453J
чиком 41, связанным с устройством 9 рассогласования.
Механизм работает следуюпщм образом. Силовой двигатель 3 вьркимает всю кинематическую цепь 40,39,2 на червяк 6, как на жесткий упор. При включении управляющего двигателя 7 червяк 6 работает в режиме отторма- живания, управляя положением и скоростью рабочего органа 4. Датчик 8 контролирует положение рабочего органа 4 и подает сигнал, соответствующий этому положению, на устройство 9 рассогласования. Последнее формирует сигнал рассогласования между заданием (сигнал задатчика 41) и отработкой (сигнал датчика 8), который через логический блок 11 и первый усилитель 10 поступает на управляющий двигатель 7.
Когда сигнал рассогласования станет меньше некоторой критической величины, соответствующей зоне нечувствительности, двигатель 7 и червяк 6 остановятся, остановят всю кинематическую цепь 40,39,2 и рабочий орган 4. Сигнал рассогласования, формируемый устройством 9 перестает изменяться. Этот факт используется логическим блоком 11 для подачи сигнала рассогласования через второй усилитель 12 на силовой двигатель 3.
Последний, увеличивая натяг кинематической цепи 40,39,2, управляет
20
25
30
тает следующим образом.
Пусть сигнал рассогласования буее деформацией и обеспечивает отра- ботку задания с высокой точностью. При этом логический блок 11 рабо- дет высокого уровня. .Тогда на выхо- дах элементов 20 и 21 будут логичес-
ее деформацией и обеспечивает отра- ботку задания с высокой точностью. При этом логический блок 11 рабо- дет высокого уровня. .Тогда на выхо- дах элементов 20 и 21 будут логичес-
кие нули. На выходе элемента 24 - логический нуль. На выходе элементов 22 и 23 - логические единицы и, следовательно, на выходе элемента 25 - также логическая единица.
Выходной сигнал устройства 9 че- .рез ключ 27 первый усилитель 10 проходит на управляющий двигатель 7.
Когда сигнал рассогласования уменьшается до некоторого определенного уровня, элемент 20 перестает его пропускать и, следовательно, у него на вьЬсоде будет лргическая единица. На выходе элемента 24 - единица, на выходе элемента 22 - нуль, на выходе элемента 25 - нуль.
.3
с вькода устройства 9 сигнал рассогласования через ключ 26 и усилитель 12 поступает на силовой двигатель 3.
Когда сигнал рассогласования станет меньше второго определенного , уровня, элемент 21 также перестает его пропускать. На выходах элементов 24,25 - логические нули, сигнал с выхода устройства 9 на двигатели не проходит.
Устройство позволяет повысить точность отработки сигнала и уменьшить передаточное отношение червячного редуктора, т.е. уменьшить габариты.
Формула изобретения
Исполнительный механизм, содержащий самотормозящую червячную передачу, вал червячного колеса которой связан с силовым двигателем и с рабочим органом, а вал червяка - с управляющим двигателем, и цепь обратной связи, выполненную в виде последовательно соединенных датчика положения и устройства рассогласования, а также первого усилителя, причем
10
544534
вход датчика положения соединен с рабочим органом, а выход первого усилителя - с управляющим двигателем, отличающийся тем, что, с целью повьштения точности и уменьшения габаритов механизма, цепь обратной связи снабжена логическим блоком и вторым усилителем, причем вход логического блока связан с выходом устройства рассогласования, первый выход - с входом усилителя, второй выход - с входом второго усилителя, выход которого связан с силовым двигателем, а логический блок состоит из двух пороговых элементов, двух элементов НЕ; двух элементов И и двух ключей, причем .входы пороговых элементов соединены с входом логического блока, выход первого порогового элемента - с входами первого элемента НЕ и первого элемента И, выход второго порогового элемента - с входом второго элемента НЕ, выход первого элемента НЕ - с первым входом второго элемента И, выход второго элемента НЕ - с вторыми входами элементов И, а ключи соединены с входом логического блока и выxoдa al элементов И.
15
20
25
Ч i /М
пи / rtx
; x4-.
/
J9
/
12
Щ Щ
J
W
11
8
д
.0
15
5Э 16
Фиг,1
10
Составитель В.Муханов Редактор Н.Слободяник Техред И.Попович Корректор Е.Сирохман
Заказ 4719/51Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое йредприятие, г.Ужгород, ул.Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления рабочим органом станка и привод подачи станка | 1985 |
|
SU1340914A2 |
| Привод подачи станка | 1983 |
|
SU1174165A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Устройство для автоматической настройки дугогасящего плунжерного реактора | 1986 |
|
SU1390704A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2259505C1 |
| Механический усилитель | 1979 |
|
SU868732A1 |
Изобретение относится к области устройств управления. Цепь изобретения - повышение точности и уменьшение габаритов. Исполнительный ме- ханизм содержит червячную передачу, связанную с силовым и управляющим двигателями, а также с рабочим органом, обратную связь в виде последовательно соединенных датчика положения, устройства рассогласования и усилителя между рабочим органсж и управляющим двигателем. Повышение точности и уменьшение габаритов обеспечивается тем, что обратная связь снабжена логическим блоком и вторым усилителем, причем, вход логического блока связан с выходом устройства рассогласования, первь) выход - с входом усилителя, второй выход - с входом второго усилителя, выход которого связан с силовым двигателем. 2 ил. сл ел 4i 4i Oi 09
| Лещенко В.А | |||
| и др | |||
| Станки с числовым программным управлением | |||
| М., Машиностроение, 1979, с.15-23, рис.1.5 | |||
| Механический усилитель | 1979 |
|
SU868732A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
