1
Изобретение относится к машиностроению и может быть использовано в станках преимущественно с программным управлением, автоматических приборах и установках, например в приводе основного зеркала антенной системы радиотелескопа, а также в других машинах, имеющих автоматически управляемые исполнительные меха- низмы .для точной установки (позиционирования) рабочего органа с,
Цель изобретения - довьшение точности позиционирования рабочего ор- .гана за счет увеличения вторично прикладываемой нагрузки на постоянную величину, учитывающую величину рассогласования между заданной и текзтцей координатами рабочего органа, и податливость кинематической цепи о
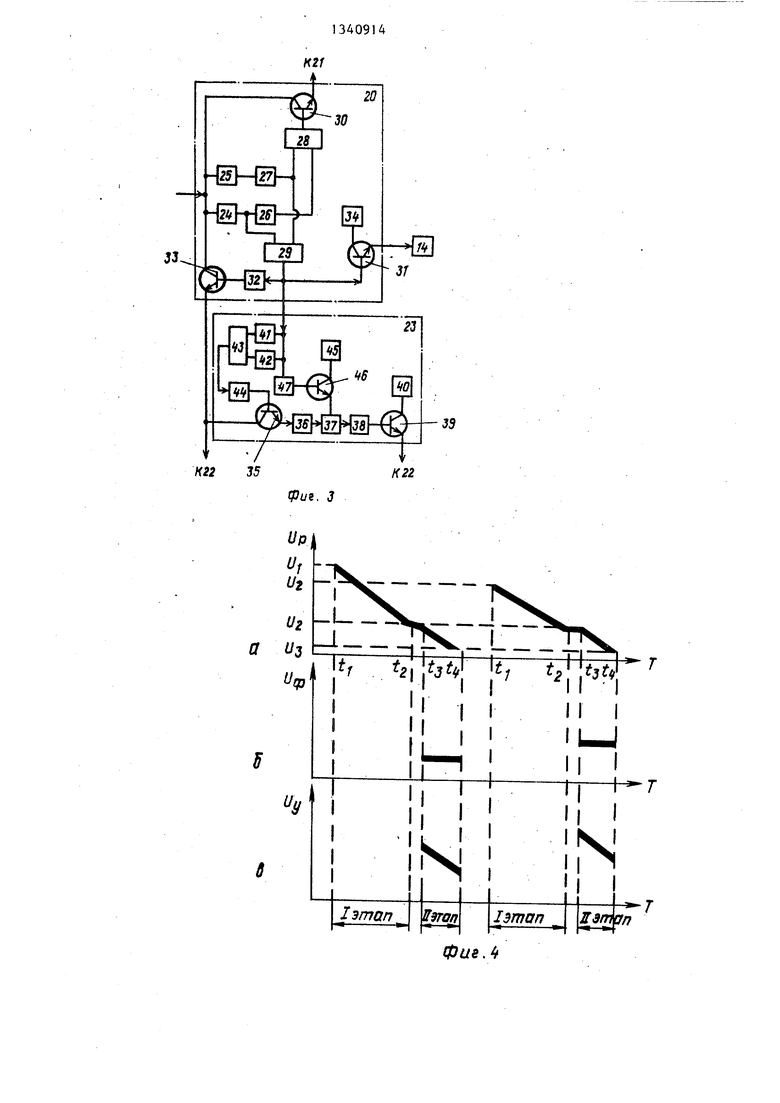
На фиГо изображен график, поясняющий осуществление способа; на фиг„2 схема привода; на фиг.З - блок-схема формирователя дополнительного усилия и логической схемы при их аппаратной реализации; нд фиг.4 - график временных диаграмм преобразования рассогласования между заданной и текущей координатами рабочего ор- гана; на фиг.З -.блок-схема алгоритма формирователя и логической схемы при их программной реализациис
График, изображенный на фиг«1, показывает зависимость перемещения рабочего органа от приклады.ваемого к нему усилия
Пусть задано перемещение в координату . Отработку задания осуществляют в два этапа„ На первом этапе к рабочему органу прикладывают нагрузку (на графике не показана В результате рабочий орган начинает перемещаться и, например, останавливается в точке 1 с координатой ,„ Из-за наличия зоны нечувствительности далзьнейшее перемещение в точку 2 с координатой невозможное
Формальные признаки окончания первого этапа - либо постоянство сигна- ла рассогласования5 либо достижение им некоторого наперед заданного значения,, Для позиционирования в точку ((„) рабочий орган фиксируют,, после чего вторично прикладывают к нему нагрузку ,, ве.пичина которой на графике отмечена точкой 3, Упомянутая нагрузка деформирует кинематическую цепЬо
42
Величину (отрезок 1,3) нагрузки Р определяют из соотношения;
РФ -
где k tg Ы (см„фиг,1) - некоторый определенный коэффициент усиления.
Таким образом, отрезок 3,2 - график 4 изменения нагрузки, приложенной к рабочему органу, при его перемещении из точки 1 в направлении точки 2
Однако, вследствие увеличения де- формации кинематической цепи ее сопротивление возрастает. При линейной зависимости сопротивления кинемати- :ческой цепи от деформации ее вели ш- ну сопротивления определяют из соотношения:
р.---,
где Р - величина сопротивления кинематической цепи; ь - величина деформации кинематической цепи; е - податливость кинематической
цепи.. Из графика фиг - tgS Тогда
отрезок 1,5 - есть график 6 изменения сопротивления кинематической цепи о
Графики 4 к 6 пересекаются в точке .5, вследствие чего рабочий орган может переместиться: на величину S ,
U,
Для перемещения рабочего органа в точку 2 на втором этапе после фиксации рабочего органа вторично прикладываемую нагрузку увеличивают на постоянную величину Рд, (отрезок точки 3,7) определяемую из соотношения:
Р .
доп. g
Из фиг„1 видно, что в результате графики 4 - изменения нагрузки на рабочий орган и 6 - сопротивления кинематической цепи: пересекаются в точ:ке 8, абсцисса которой совпадает с координатой, в которую требовалось переместить рабочий орган
Значение Рдоп течение второго эта:па отработки заданного перемещения должно оставаться постоянным, поскольку Sm для каждого задания случайно меняющаяся величина, значение Рдрп выбирают при отработке ка:ж;п,ого задания заново с
313
Таким образом, точность отработки заданного перемещения определ;яет- ся точностью выбора значения дополнительной нагрузки Рдд, о
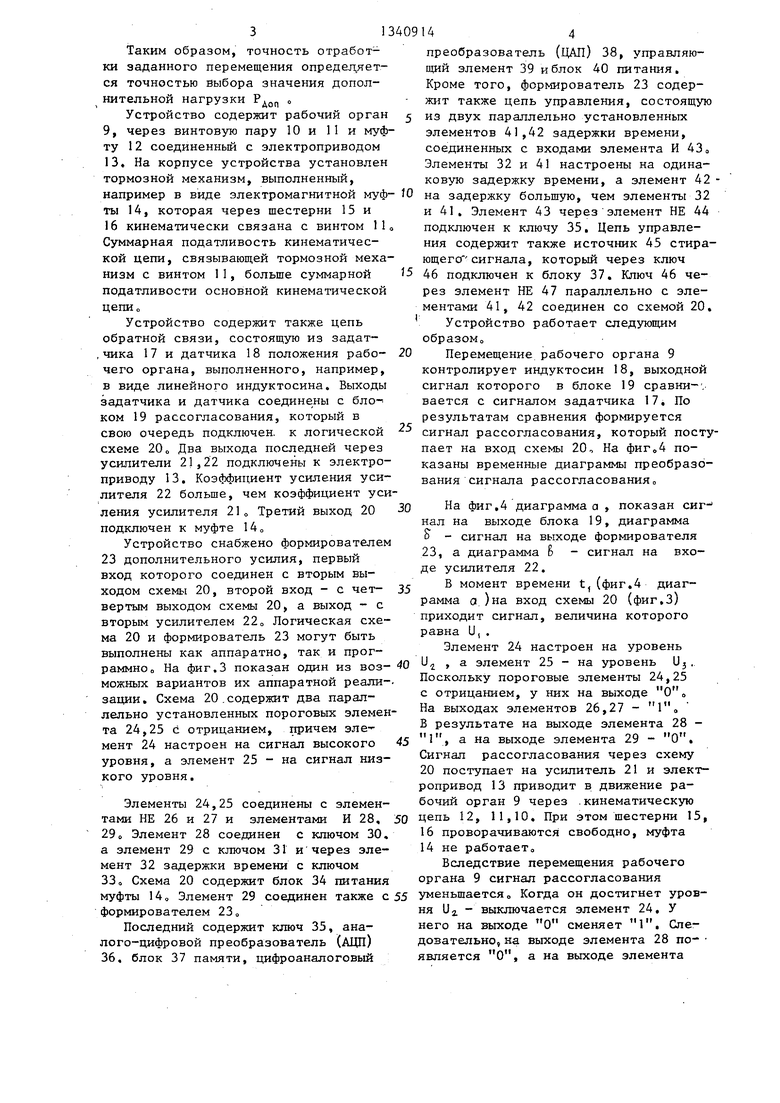
Устройство содержит рабочий орган 9, через винтовую пару 10 и 11 и муфту 12 соединенный с электроприводом 13, На корпусе устройства установлен тормозной механизм, выполненный.
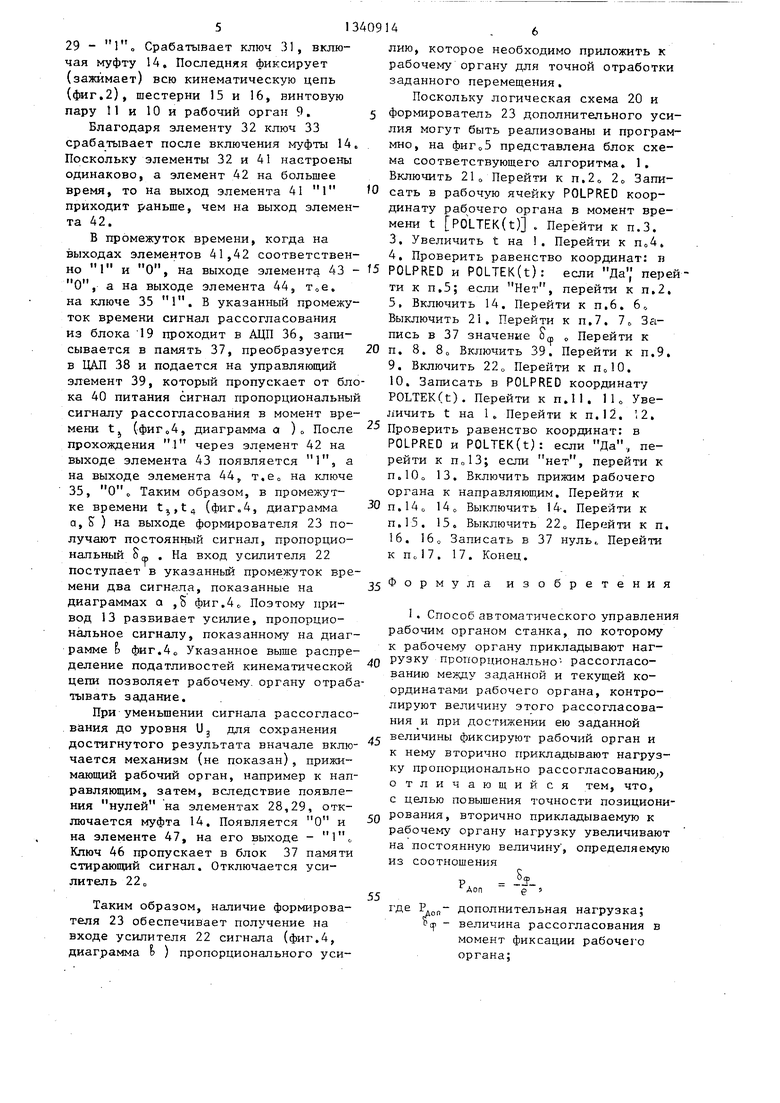
преобразователь (ЦАП) 38, управляющий элемент 39 и блок 40 питания. Кроме того, формирователь 23 содержит также цепь управления, состоящую из двух параллельно установленных элементов 41,42 задержки времени, соединенных с входами элемента И 43Q Элементы 32 и 41 настроены на одинаковую задержку времени, а элемент 42
например в виде электромагнитной муф- Ш на задержку большую, чем элементы 32
20
25
ты 14, которая через шестерни 15 и 16 кинематически связана с винтом По Суммарная податливость кинематической цепи, связывающей тормозной механизм с винтом 11, больше суммарной J5 податливости основной кинематической цепи о
Устройство содержит также цепь обратной связи, состоящую из задат- ,чика 17 и датчика 18 положения рабочего органа, выполненного, например, в виде линейного индуктосина. Выходы задатчика и датчика соединены с блоком 19 рассогласования, который в свою очередь подключен, к логической схеме 20,, Два выхода последней через усилители 21,22 подключены к электроприводу 13. Коэффициент усиления усилителя 22 больше, чем коэффициент усиления усилителя 21 о Третий выход 20 -30 подключен к муфте 14о
Устройство снабжено формирователем 23 дополнительного усилия, первый вход которого соединен с вторым выходом схемы 20, второй вход - с чет- 35 вертым выходом схемы 20, а выход - с вторым усилителем 22 Логическая схема 20 и формирователь 23 могут быть выполнены как аппаратно, так и программно На фиг.З показан один из воз- 40 можных вариантов их аппаратной реали-- зации. Схема 20.содержит два параллельно установленных пороговых элемента 24,25 с отрицанием, причем элемент 24 настроен на сигнал высокого 45 уровня, а элемент 25 - на сигнал низкого уровня.
Элементы 24,25 соединены с элементами НЕ 26 и 27 и элементами И 28, 50 29 о Элемент 28 соединен с ключом 30. а элемент 29 с ключом 31 и через элемент 32 задержки времени с ключом 33 о Схема 20 содержит блок 34 питания муфты 14 о Элемент 29 соединен также с 55 формирователем 23„
Последний содержит ключ 35, аналого-цифровой преобразователь (АЦП) 36, блок 37 памяти, цифроаналоговый
и 41. Элемент 43 через элемент НЕ 44 подключен к ключу 35. Цепь управления содержит также источник 45 стирающего сигнала, который через ключ 46 подключен к блоку 37, Ключ 46 через элемент НЕ 47 параллельно с элементами 41, 42 соединен со схемой 20,
Устройство работает следующим образомо
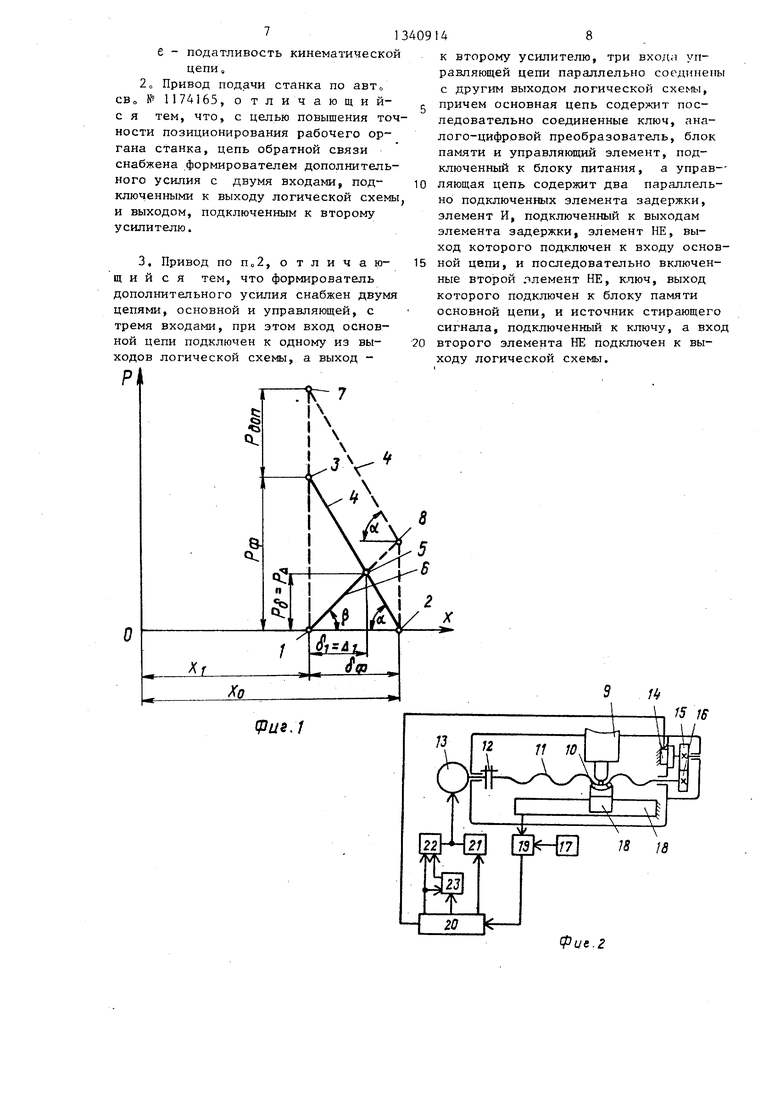
Перемещение рабочего органа 9 контролирует индуктосин 18, выходной сигнал которого в блоке 19 сравни- , вается с сигналом задатчика 17, По результатам сравнения формируется сигнал рассогласования, который поступает на вход схемы 20, На фиг«4 показаны временные диаграммы преобразования сигнала рассогласования
На фиг,4 диаграмма а , показан сиг- нал на выходе блока 19, диаграмма 0 - сигнал на выходе формирователя 23, а диаграмма & - сигнал на входе усилителя 22,
В момент времени t,(фиг,4 диаграмма а )на вход схемы 20 (фиг,3) приходит сигнал, величина которого равна и,.
Элемент 24 настроен на уровень и , а элемент 25 - на уровень Uj, Поскольку пороговые элементы 24,25 с отрицанием, у них на выходе О На выходах элементов 26,27 - I В результате на выходе элемента 28 - 1, а на выходе элемента 29 - О, Сигнал рассогласования через схему 20 поступает на усилитель 21 и электропривод 13 приводит В1 движение рабочий орган 9 через .кинематическую цепь 12, 11,10, При этом шестерни 15, 16 проворачиваются свободно, муфта 14 не работает
Вследствие перемещения рабочего органа 9 сигнал рассогласования уменьшается Когда он достигнет уровня и 2. - выключается элемент 24, У него на выходе О сменяет 1. Следовательно, на выходе элемента 28 по- является О, а на выходе элемента
4
преобразователь (ЦАП) 38, управляющий элемент 39 и блок 40 питания. Кроме того, формирователь 23 содержит также цепь управления, состоящую из двух параллельно установленных элементов 41,42 задержки времени, соединенных с входами элемента И 43Q Элементы 32 и 41 настроены на одинаковую задержку времени, а элемент 42 на задержку большую, чем элементы 32
0
5
5
0
5
и 41. Элемент 43 через элемент НЕ 44 подключен к ключу 35. Цепь управления содержит также источник 45 стирающего сигнала, который через ключ 46 подключен к блоку 37, Ключ 46 через элемент НЕ 47 параллельно с элементами 41, 42 соединен со схемой 20,
Устройство работает следующим образомо
Перемещение рабочего органа 9 контролирует индуктосин 18, выходной сигнал которого в блоке 19 сравни- , вается с сигналом задатчика 17, По результатам сравнения формируется сигнал рассогласования, который поступает на вход схемы 20, На фиг«4 показаны временные диаграммы преобразования сигнала рассогласования
На фиг,4 диаграмма а , показан сиг- нал на выходе блока 19, диаграмма 0 - сигнал на выходе формирователя 23, а диаграмма & - сигнал на входе усилителя 22,
В момент времени t,(фиг,4 диаграмма а )на вход схемы 20 (фиг,3) приходит сигнал, величина которого равна и,.
Элемент 24 настроен на уровень и , а элемент 25 - на уровень Uj, Поскольку пороговые элементы 24,25 с отрицанием, у них на выходе О На выходах элементов 26,27 - I В результате на выходе элемента 28 - 1, а на выходе элемента 29 - О, Сигнал рассогласования через схему 20 поступает на усилитель 21 и электропривод 13 приводит В1 движение рабочий орган 9 через .кинематическую цепь 12, 11,10, При этом шестерни 15, 16 проворачиваются свободно, муфта 14 не работает
Вследствие перемещения рабочего органа 9 сигнал рассогласования уменьшается Когда он достигнет уровня и 2. - выключается элемент 24, У него на выходе О сменяет 1. Следовательно, на выходе элемента 28 по- является О, а на выходе элемента
513
29 - I Срабатывает ключ 31, включая муфту 14, Последняя фиксирует (зажимает) всю кинематическую цепь (фиг.2), шестерни 15 и 16, винтовую пару 11 и 10 и рабочий орган 9.
Благодаря элементу 32 ключ 33 срабатывает после включения муфты 14 Поскольку элементы 32 и 41 настроены одинаково, а элемент 42 на большее время, то на выход элемента 41 1 приходит раньше, чем на выход элемента 42.
В промежуток времени, когда на выходах элементов 41,42 соответственно 1 и О, на выходе элемента 43 - О, а на выходе элемента 44, Тое, на ключе 35 1. В указанный промежуток времени сигнал рассогласования из блока 19 проходит в АЦП 36, записывается в память 37, преобразуется в ЦАП 38 и подается на управляюпщй элемент 39, который пропускает от блока 40 питания сигнал пропорциональный сигналу рассогласования в момент времени tj (фиго4, диаграмма а )о После прохождения 1 через элемент 42 на выходе элемента 43 появляется 1, а на выходе элемента 44, т.е„ на ключе 35, О Таким образом, в промежутке времени t,t4 (фиг«4, диаграмма а, S ) на выходе формирователя 23 получают постоянный сигнал, пропорциональный Sm . На вход усилителя 22 поступает в указанньй промежуток времени два сигнала, показанные на диаграммах а ,5 фиг.4с. Поэтому привод 13 развивает усилие, пропорциональное сигналу, показанному на диаграмме S фиг.4о Указанное выше распре
п-
деление податливостеи кинематической цепи позволяет рабочему, органу отрабатывать задание.
При уменьшении сигнала рассогласования до уровня Uj для сохранения достигнутого результата вначале вклю чается механизм (не показан), прижимающий рабочий орган, например к направляющим, затем, вследствие появления нулей на элементах 28,29, отключается муфта 14. Появляется О и на элементе 47, на его выходе - 1 Ключ 46 пропускает в блок 37 памяти стирающий сигнал. Отключается усилитель 22 о
Таким образом, наличие формирователя 23 обеспечивает получение на входе усилителя 22 сигнала (фиг.4, диаграмма & ) пропорционального уси
5
JO 520-303545
1А.6
ЛИЮ, которое необходимо приложить к рабочему органу для точной отработки заданного перемещения.
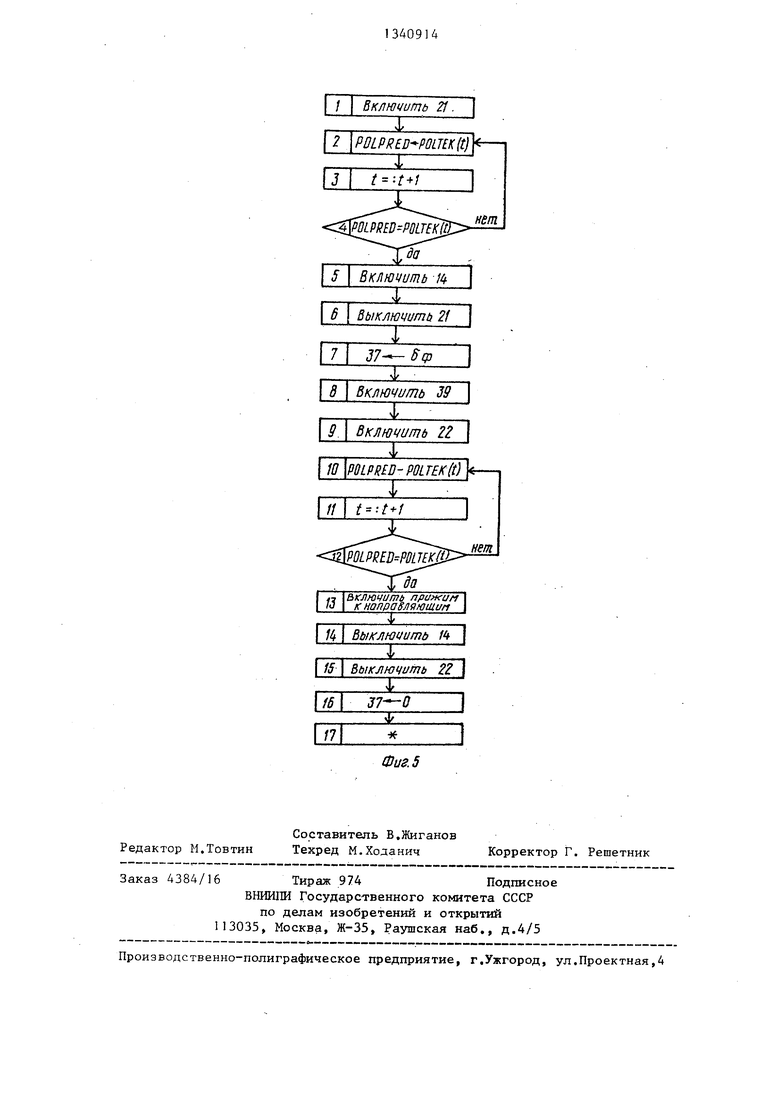
Поскольку логическая схема 20 и формирователь 23 дополнительного усилия могут быть реализованы и программно, на фиг о5 представлена блок схема соответствующего алгоритма, 1. Включить 21 о Перейти к п.2о 2 Записать в рабочую ячейку POLPRED координату рабочего органа в момент времени t pdLTEK(t) . Перейти к п.З.
3.Увеличить t на 1. Перейти к По4,
4.Проверить равенство координат: в POLPRED и POLTEK(t): если Да , перейти к п.5; если Нет, перейти к п.2.
5.Включить 14. Перейти к п.6. 6 Выключить 21. Перейти к п.7. 7 Запись в 37 значение 5 ф „ Перейти к
п. 8. 8о Включить 39. Перейти к п.9.
9.Включить 22о Перейти к ПоЮ.
10.Записать в POLPRED координату POLTEK(t). Перейти к п,11. По Увеличить t на 1„ Перейти к п.12. 12. Проверить равенство координат: в POLPRED и POLTEK(t): если Да, перейти к По 13; если нет, перейти к п. 10о 13. Включить прижим рабочего органа к направляющем. Перейти к
п. 14 о 14 о Выключить 14-. Перейти к п.15. 15, Выключить 22„ Перейти к п. 16. 16 „ Записать в 37 нуль,. Перейти к По 17. 17. Конец.
Формула изобретения
1 . Способ автоматического управления рабочим органом станка, по которому к рабочему органу прикладывают наг- Q рузку пропорционально рассогласованию между заданной и текущей координатами рабочего органа, контролируют величину этого рассогласования и при достижении ею заданной величины фиксируют рабочий орган и к нему вторично прикладывают нагрузку пропорционально рассогласованию, отличающийся тем, что, с целью повышения точности позиционирования , вторично прикладываемую к рабочему органу нагрузку увеличивают на постоянную величину , определяемую из соотношения
Аоп
дополнительная нагрузка;
Рср - величина рассогласования в момент фиксации рабочего органа;
713409
е - податливость кинематической
цепи,
2о Привод подачи станка по авт., сВо № 1174165, о т л и ч а ю щ и й- с я тем, что, с целью повышения точности позиционирования рабочего органа станка, цепь обратной связи снабжена .формирователем дополнительного усилия с двумя входами, под- ю ключенными к выходу логической схемы и выходом, подключенным к второму усилителю.
3, Привод по п„2, отличаю- щ и и с я тем, что формирователь дополнительного усилия снабжен двумя цепями, основной и управляющей, с тремя входами, при этом вход основной цепи подключен к одному из вы- ходов логической схемы, а выход
8
к второму усилителю, три вход;) управляющей цепи параллельно соединены с другим выходом логической схемы, причем основная цепь содержит последовательно соединенные ключ, аналого-цифровой преобразователь, блок памяти и управляющий элемент, подключенный к блоку питания, а управляющая цепь содержит два параллельно подключенных элемента задержки, элемент И, подключенный к выходам элемента задержки, элемент НЕ, выход которого подключен к входу основной цепи, и последовательно включенные второй ллемент НЕ, ключ, выход которого подключен к блоку памяти основной цепи, и источник стирающего сигнала, подключенный к ключу, а вхо второго элемента НЕ подключен к выходу логической схемы.
Фие.2
К 22
фие. J
Up
Uj U2
U2
a i/j (p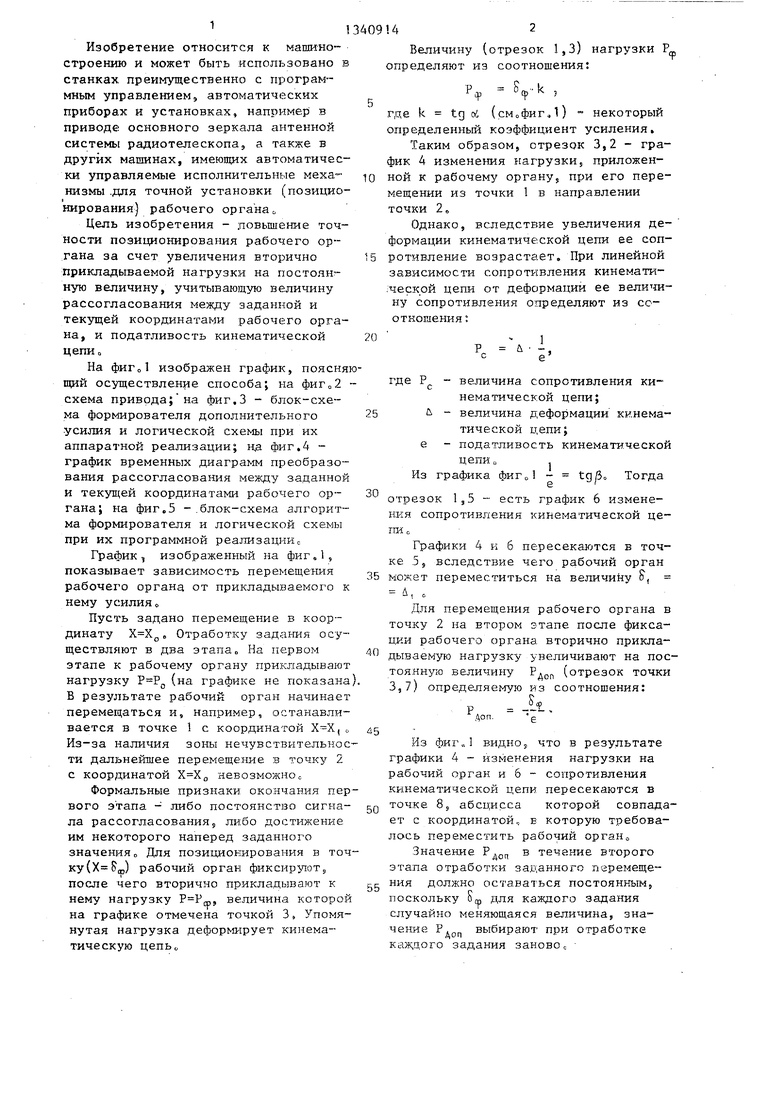
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Привод подачи станка | 1983 |
|
SU1174165A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Преобразователь постоянного напряжения | 1985 |
|
SU1361686A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Преобразовательная установка | 1986 |
|
SU1418874A1 |
| Термостатирующее устройство | 1983 |
|
SU1193647A1 |
| Регулятор переменного напряжения | 2024 |
|
RU2832860C1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1372516A1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
Изобретение относится к машиностроению и может быть использовано в станках с программным управлением , автоматических приборах и устройствах, например в приводе основного зеркала антенной системы радиотелескопа, а также в других машинах, имеюпшх автоматически управляемые исполнительные механизмы для установки рабочего органа Цель изобретения - повьппение точности позиционирования рабочего органа за счет увеличения вторично прикладываемой нагрузки на постоянную величину, учитьгоаю- щую величину рассогласования между заданной и текущей координатами рабочего органа и податливость кинематической цепи о Отработку заданного перемещения осуществляют в два этапа. На первом этапе к рабочему органу прикладывают нагрузку, пропорциональную рассогласованиюо При достижении сигналом рассогласования либо постоянного значения, либо наперед заданной величины рабочий орган фиксируют, после чего вторично прикладывают нагрузку, пропорциональную рассогласованию, увеличивая ее на постоянную величину, определяемую из соо гноше- РЛОП ф/е где Рдо„ - дополнительная нагрузка; S - величина рассогласования в момент фиксации рабочего органа; е - податливость кинематической цепи о В результате устраняют влияние таких нелинейностей как зона нечувствительности, зазоры, погрешности изготовления звеньев кинематической цепи и ТоП. 5 ил. с S (Л со 4 О ;о N
фиг л
lY Вклюуить 21. I
зг
8 Вк тчить 39
Ю PBLPRED-POLTEK(t)
п Е лючить iJ I к направляюшип
Н I Выключить /4 I
15 Выключить
fS J7-g
Редактор М.Товтин
Составитель В.Жиганов Техред М.Ходанич
Заказ 4384/16 Тираж 974Подписное
ВНИИЛИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Г. Решетник
| Привод подачи станка | 1983 |
|
SU1174165A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
