Изобретение относится к .области управления динамическими объектами в условиях неопределенности и может найти применение в адаптивных системах и устройствах для определения характеристик стохастических динамических объектов.
Цель изобретения - расширение функциональных возможностей, повышение быстродействия, точности и помехозащищенности устройства.
На фиг, 1 приведена фyн ;и ioнaль- ная блок-схема идентификатора параметров стохасти Геского динамического объектаj на фиг.2 - 17 - пример реализации блоков, входящих в. сос- тав предлагаемого устройства.
Идентификатор содержит последовательное соединение настраиваемой модели объекта 1, первого блока 2 суммирования, первого блока 3 умножения второго блока 4 умножения, второго блока 5 суммирования, первого блока 6 задержки и четвертого блока 7 умножения, последовательное соединение первого нелинейного преобразователя ,8, пятого блока 9 умножения, четвертого блока 10 суммированияJ шестого 11 и седьмого 12 блоков умножения, последовательное соединение третьего блока 13 умножения, третьего блока 14 суммирования, блока 15 усиления и блока 16 обращения матрицы, второй блок 17 задержки, второй нелиней нь1й преобразователь 18, третий блок 19 задержки, восьмой блок 20 умножения, первьш 21, второй 22, третий 23 блоки памяти, генератор 24 тактовых импульсов. Первый вход настраиваемой модели объекта 1 соединен с шиной входного сигнала объекта , второй ее вход соединен с выходом четвертого блока 7 умножения, третий вход соединен со вторым блоком 22 памяти. Второй вход первого блока 2 суммирования соединен с шиной измеряемого выходного сигнала объекта z(K+1), второй вход первого блока умножения 3 соединен с выходом седьмого блока 12 умножения, второй вход второго блока 4 умножения соединен с выходом блока 16 обращения матрицы, вход второго блока 17 задержки соединен с выходом блока 15 усиления, а выход соединен с вторьм входом третьего блока 14 суммирования. Первый вход третьего блока 13
умножения соединен с выходом седьмого блока 12 умножения, а второй вход соединен с выходом шестого блока (Гумножения, Вторые входы четвертого 7 и пятого 9 блоков умножения соединены с первым блоком 21 памяти, второй вход шестого блока 11 умножения соединен со вторым блоком 22 памяти. Третий блок 23 памяти соединен со вторым входом седьмого блока 12 умножения. Второй вход второго блока 5 суммирования соединен с выходом первого блока 6 задержки. Первые входы нелинейных пре- образователей 8 и 18 соединены с первым входом настраиваемой модели объекта, вторые входы соединены с выходом четвертого блока 7 умножения, третьи входы соединены с вторым выходом настраиваемой модели объекта 1, а выходы соединены с первыми входами пятого 9 и восьмого 20 блоков умножения соответственно. Второй вход восьмого блока 20 умножения соединен с выходом третьего блока 19 задержки, а выход соединен со вторым входом четвертого блока 10 суммирования, выход которого соединен со входом третьего блока 19 задержки, Генератор 24 тактовых импульсов соединен с блоками 21-23 памяти.
Идентификатор параметров стохастического динамического объекта работает следующим образом.
На выходе первого блока суммирования формируется сигнал невязки zLk+1 .. .
Векторный сигнал измеряется на выходе объекта, описываемого урав35
40 нениями
(k,,,k ), Vlk+1,
гдк вектор состояния объекта; «,5
Z - векторы измеряемых входных
и выходных сигналов объекта;
V k+ll- векторньй гауссовский шум с нулевым математическим ожиданием и положительно определенной матрицей ин-i тенсивности вектор случайньк параметров объекта, изменение которых может быть описано в виде Lk u f.k.-V ;
.
V - случайный вектор с заданным математическим ожиданием m и ковариационной матрицей Р
- известные матричные функции времениi
Ф(-) - нелинейная непрерьгоно дифференцируемая векторная функция.
Векторный сигнал формируется на первом выходе настраиваемой модели объекта 1, описываемой уравнением
X k+1 9(k,,,, где k - оценка вектора параметро объекта k, которая формируется на выходе четвертого блока 7 умножения в видеИ VLkl, причем на пер- вьй вход этого блока подаётся вектор ный сигнал Ufk , а на второй его вход - известный матричный сигнал H tk. Векторный сигнал ) является оценкой параметров V, определяемой уравнением
U{k+1 U kI+b k-Hluz k+l где матрица функций чувствительности выходных координат объекта к влиянию отклонений действительны значений идентифицируемых параметров и от их оценок , равная X k+1, где матрица функций чувствительности вектора состояния объекта к влиянию отклонений действительных значений идентифи ij(HpyeMbix параметров U от их оценок Utk, равная
ф (k,, , k) +94k,, glk,tk-),, где 9 (k,,,Hfk7)
, . Э
(k.xtk, ,)
. , , tk ) ф (k.xtkl
,М; - 1 Lk,. ,
матрица определяется уравнением
b ( +f |:k+1 R tk+1 f fk+ll), ..
Матричные функции P Ч ) и ) реализуются в первом 8 и втором 18 нелинейных преобразователях соответственно. Матричные сигналы ), Ф (Ох k формируются в пятом 9
10
20
5
45
25
30
35
40
50
55
блоках умножения соот- Матричный сигнал х k+П
и восьмом 20 ветственно. формируется на выходе четвертого блока 10 суммирования. В третьем блоке 19 задержки осуп ествляется задержка сигнала х k+1 на один такт. На выходе шестого блока 11 умножения фор- .мируется матричный сигнал. -х k+1.
т.- 1 1 Матричные сигналы f Lk+1J-R
k+1 и формируются в седьмом 12 и тре- тьем 13 блоках умножения соответственно. В третьем блоке 14 суммирования формируется матричный сигнал +.f4k+1 R k+1 . На выходе блока 15 усиления формируется матричный сигнал . Коэффициент усиления блока а 1 выбирается, исходя из максимальной скорости дрейфа . вектора параметров в реальной системе, начальное значение выбирается, исходя из диапазона начальных ошибок идентификации, и определяет скорость переходного процесса идентификации. Во втором блоке 17 задержки осуществляется задержка сигнала на один такт. В блоке 16 осуществляется обращение матрицы btk+1. В первом блоке 3 умножения вляется перемножение сигналов f k+11: R k+1 и . Во втором блоке 4 умножения перемножаются сигналы f k+1 -R i:k+1 k k+l.. Ha выходе второго блока 5 суммирования формируется векторный сигнал . Первый блок 6 задержки осуществляет задержку этого сигнала на один такт. В первом блоке 21 памяти содержатся элементы матрицыЧ Сkl, во втором блоке 22 памяти содержатся элементы матрицы htk+1l в третьем блоке 23 памяти содержатся элементы матрицы К Ck+1 . Выборка элементов матриц из памяти осуществляется по командам генератора тактовых импульсов.
Включение в идентификатор нелинейных преобразователей, четвертого блока суммирования, третьего блока задержки,- пятого, восьмого и шестого блоков умножения и первого и второго блоков памяти обеспечивает формирование функции чувствительности выходных координат объекта к влиянию отклонений действительных значений идентифицируемых параметров U от их оценок иСИ, получаемых на выходе
первого блока задержки, что позволяет осуществить с высокой точностью идентификацию параметров линейных и нелинейных объектов в широком диапазоне изменения их параметров. Вклю чение четвертого блока умножения и первого блока памяти обеспечивает высокое быстродействие устройства при оценивании параметров объекта Lk, подверженных быстрым измене- ниям во времени. Сигналы, формируемые с помощью седьмого блока умножения и третьего блока памяти, обеспечивают эффективное уменьшение влияния помех при изменении их ин- тенсивностей в широком диапазоне, Включение блока усиления позволяет обеспечить стабильную динамику процессов идентификации при изменении уровня рабочих сигналов в широких пределах, а также ограничение памяти идентификатора, что приводит к эффективной работе устройства при дрейфе параметров объекта U. Все введенные блоки в комплексе обеспечивают автоматическую развяз- ку каналов при идентификации нескольких параметров одновременно и координацию сигналов, поступающих на устройство с различных датчи ков информации.
Отмеченные свойства позволяют применить предлагаемое устройство для оценки неизвестных параметров динамических нелинейных объектов в случае нескольких измеряемых выходных сигналов, при существенном изменении интенсивностей помех,при дрейфе неизвестных параметров объекта, а также повьшает быстродействие точность и помехозащищенность процессов идентификации, что подтверждается применением предлагаемого усройства при исследовании систем стабилизации и навигации летательных аппаратов. Расчеты и моделирование показывают, что в отличие от известного устройства изобретение эффектино функционирует при идентификации как линейных, так и нелинейных объ- ектов с несколькими зашумленными выходными сигналами при произвольном расположении неизвестных параметров в структуре объекта, существенном дрейфе этих параметров во времени, Например, для одной из конкретных систем применение предлагаемого устройства позволяет уменьшить длитесь a l I
ность процессов идентификации на 50- 70%, а точность повысить на 30-40%.
Блоки памяти представляют собой стандартные блоки ОЗУ и могут быть реализованы на стандартных элементах. Остальные блоки устройства реализуются на известных элементах аналого-цифровой вычислительной техники.
Рассмотрим пример реализации идентификатора параметров стохастического динамического объекта вида
, ,:
xjk+lp-h lx lk +xjkl+ l k z k+n hjk+1| tk+11 .,
где ,
- координаты состояния объекта ,
- измеряемый выходной сигнал объекта;
- входной сигнал объекта, V k+Il- гауссовский дискретный
шум с нулевым математическим ожиданием и интенсивностью Rlk+1 , b.k+l}- скалярная функция ,
n,k, - .
h k - неизвестные параметры объекта, равные
h Lkl,k3U, .U ;
- к/Л- .
у, , случайные величины с за- - данньм математическим
ожиданием m и ковариационой матрицей Р.
Для данного объекта в соответствии с принятыми обозначениями нелинейная непрерывно-дифференцируемая векторная функция Ф() имеет вид
ф(,)
Настраиваемая модель объекта (фиг.1 - блок 1) описывается уравнениями
. x, +x,
ZM Ik-Hi h k-Hllx,lk,
координат
НИЯ модели объекта .
где x, , X Lk - координаты состояz k+1 - выходной сигнал мо- i ,
дели; lk,ti оценки неизвестных
параметров объекта. Функциональная блок-схема настраиваемой модели объекта приведена на фиг. 2 Она реализуется х: помощью умножителя 1-1, осуществляющего умножение сигналов glkl , сумматора 1-2, осуществляющего суммирование сигналов hi , x,, кх Ik,первого блока 1-3 задержки, формирующего сигнал x.lk , второго
блока задержки
SM
1-4, формирующего
сигнал X k, второго умножителя
1-5, осуществляющего умножение сиг- . налов f) k , третьего умножителя 1-6, осуществляющего умножение сигналов и четвертого умножителя 1-7, формирующего сигнал (-) k, пятого умножителя 1-8, формирующего сигнал kl, шестого умножителя 1-9, формирующего сигнал i,jCk1.
В соответствии с фиг.1 вторым входом настраиваемой модели объекта являются входы четвертого 1-7 и шестого 1-9 умножителей, третьим входом является второй вход третьего умножителя 1-6. Первым выходом модели является выход третьего умножителя 1-6, вторым выходом является выход второго блока 1-4 задержки.
Первый нелинейный преобразователь (блок 8, фиг.1) формирует сигналы , (), равные
f
Ч
зг,
1 ()
(-) 3,
.
2,
2W
Функциональная блакг-схема первого нелинейного преобразователя приведена фиг.З. Она реализуется с помощью усилителя 8-1 с коэффициентом передачи, равным трем, вход которого соединен со вторым выходом настраиваемой модели объекта, умножителя 8-2, второй вход которого соединен с выходом умножителя 1-7 блока 1, усилителя 8-3 с коэффициентом передачи, равным двум, вход которого соединен с первым входом настраиваемой модели объекта, второго умножителя 8-4, второй вход которого соединен с выходом четвертого блока 7 умножения.
Второй нелинейный преобразователь (блок 18, фиг.1) формирует сигнал Ф-Ч ), равный
10
Сигнал уже сформирован в блоке 1 на выходе пятого умножителя 1-8.
Пятый блок умножения (блок 9) формирует сигналы и k и реализуется с помощью двух умножителей 9-1 и 9-2 (фиг.4).
Восьмой блок умножения (блок 20, фиг.1) формирует сигналы Д А, k равные
/,k х x, .A/k ( . .,
Его блок-схема приведена на фиг.5, Он реализуется с помощью двух умножителей 20-1 и 21-3 и двух ров 20-2 и 20-4.
Четвертый блок суммирования (блок 10, фиг.1 формирует сигналы х {k+lj и , равные
,kl kl . x, ,fk7 Lk . g k..
OH реализуется с помощью двух сумматоров 10-1 и 10-2 (фиг.6).
Третий блок задержки (блок 19, .telLs 1) формирует сигналы x/ EkJ. x,,x kT «-%и т, ,
с уравнениями
k,
в соответствии
х ;. rk+iy x ;nk+1 .1 A, Ckl.x,„Ш;
w
xj lk+l 2 kbg tkl. .
Его блок-схема приведена на фиг.7. Он реализуется с помощью четырех блоков задержки 19-1, 19-2, 19-3, 19-4j осуществляющих задержку входных сигналов на один такт.
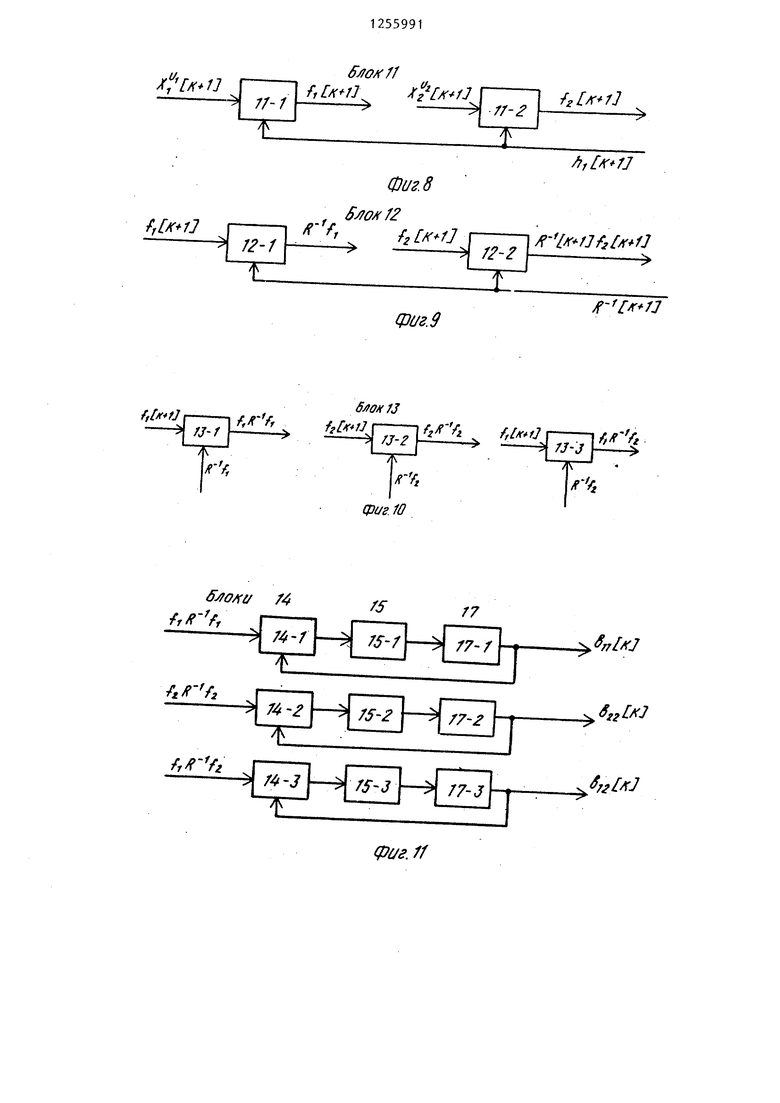
шестой блок умножения (блок 11, фиг.1) формирует сигналы f k+llj- fj.jrk+t} , равные
f,k+1 h, k+n X, ;
fjk+1 h, Ck+ll x k+1.,
и реализуется с помощью двух умножителей 11-1 и 11-2 (фиг.8).
Седьмой блок умножения (блок 12, фиг.1) формирует сигналы R k+1. f R 4k+l fJk+1 и реализуется на двух умножителях 12-1 и 12-2 (фиг.9).
Третий блок умножения (блок 13, фиг. 1) формирует сигналы p,k+1 , Р, Lk+1 , -jtk+l ,. равные 1 , k+1 f, k+1, lk+1 f fj , k+1 f k+r,
и реализуется с помощью трех умножителей 13-1, 13-2, 13-3 (фиг.10).
Третий блок суммирования (блок 14, фиг.1) формирует сигналы Ь, tk , b,,k +p/k+1 , b ,|k+ и реализуется с помощью трех сумматоров 14-1, 14-2, 14-3 (фиг.11).
Блок усиления (блок 15, фиг.1) формирует сигналы Ь,: k+ll , b k+1 и реализуется с помощью трех усилителей 15-1, 15-2 и 15-3 (фиг.11).
Второй блок задержки (блок 17, фиг.1) формирует сигналы Ь tkj, Ь,„ fk, b k и реализуется с поI), мощью трех блоков задержки 17-1,
17-2 и 17-3, осуществляющих задержку входных сигнапов на один такт (фиг.11),
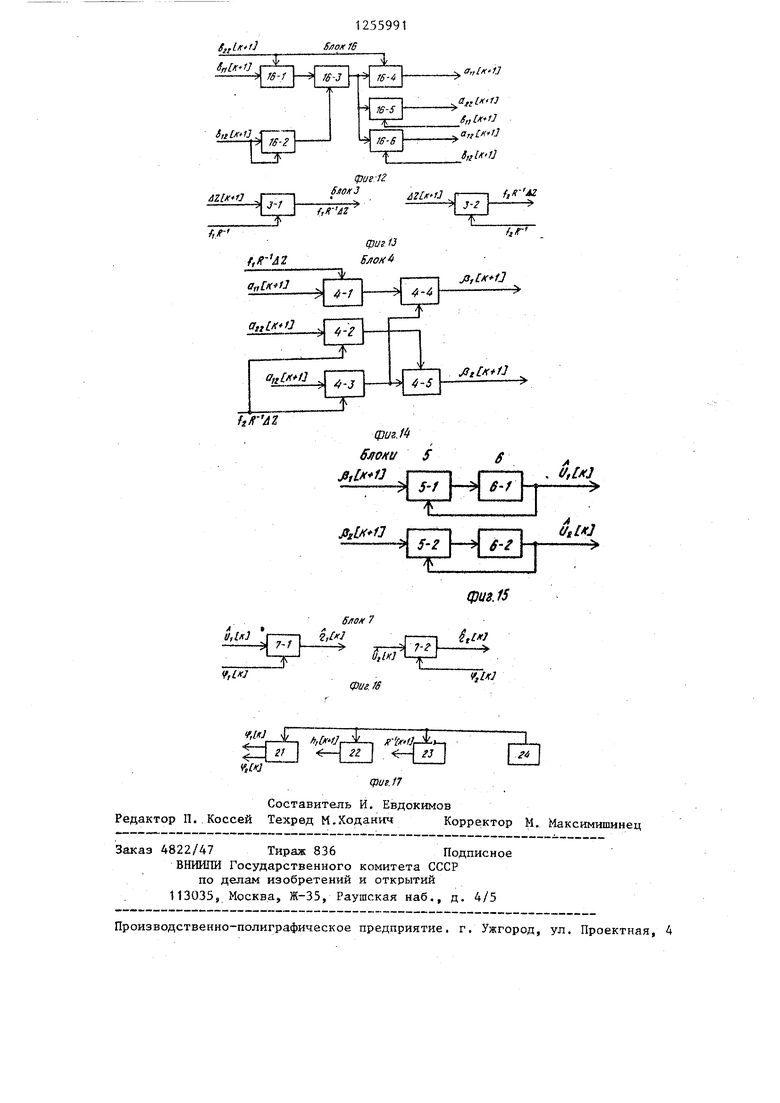
Блок обращения матрицы (блок 16, фиг.1) формирует сигналы . k+1, b, k+1 ,
b.jLk+l ,,
где tk+llbjjtk+ll-b ,k+l .
Его функциональная блок-схема приведена на фиг.12. Он реализуется с помощью первого умножителя 16формирующего сигнал Ь k+TJ-b j k второго умножителя 16-2, формирующего сигнал Ц k+1, сумматора 16-3, формирующего сигнал Л , первого делителя 16-4, формирующего сигнал а,, lk+1, второго делителя 16-5, формирующего сигнал , третьего делителя 16-6, формирующего сигнал .
Первый блок суммирования (блок 2 фиг.1) формирует сигнал невязки Л г k+1, равный , и реализуется с помощью сумматора.
Первьш блок умножения (блок 3)
формирует сигналы f, k+ll R
i I
AzEk+ll и fJk+1lR 4k+1 AZ и реализуется с помощью двух жителей 3-1 и 3-2 (фиг.13).
5
0
Второй блок умножения (блок 4 (иг.1) формирует сигналы я 1.k+1 и k+1, равные
. , k+1 R . k+n Az k+n+all k+1 f
uztk+1l ,
2lk+1 a, k+1 f,k+1lR k+1
k+1 f Lk+HR lk+lVzlk+l Его функциональная блок-схема приведена на фиг.14. Он реализуется с помощью трех умножителей 4-1,4-2, 4-3 и двух сумматоров 4-4, 4-5.
Второй блок суммирования (блок 5, фиг.1) формирует сигналы U Ck+IJ, и реализуется с помощью двух сумматоров 5-1 и 5-2 (фиг.15).
Первый блок задержки (блок 6, фиг.1) формирует сигналы и OjLkl и реализуется с помощью двух блоков задержки 6-1, 6-2, осуществляющих задержку входных сигналов на один такт (фит. 15).
Четвертый блок умножения (блок 7, фиг.1) формирует сигналы .h Ikl , 5 f| tkl, равные
eki Jkl-yjkl,
njk . и реализуется с помощью двух умножителей 7-1 и 7-2 (фиг. 16) .
Блоки памяти реализуются на стандартных элементах серии К-587 и представляют собой стандартные блоки ОЗУ, управляемые генератором тактовых импульсов. В ячейках блока 21 па- 5 мяти содержатся значения функций
Ч, fjk . В ячейках блока 22 памяти содержатся значения функции . В ячейках блока 23 памяти содержатся значения функции R k+ll (фиг.17), Генератор 24 тактовых импульсов синхронизирует работу блоков .
Формула изобретения
Идентификатор параметров стохастического динамического объекта, содержащий генератор тактовых импульсов и последовательно соединенные настраиваемую модель объекта, первый блок суммирования, первый блок умножения, второй блок умножения, второй блок суммирования, первый блок задержки, выход которого соединен с вторым входом второго блока суммирования,, третий блок умножения, третий блок суммирования, второй вход которого соединен с выходом второго блока задержки, и блок обращения матрицы, выход которого соединен с вторым входом второго блока умножения, отличающийся тем, что, с целью расширения функциональных возможностей, повьшения быстро- действия, точности и помехозащищен- ности в него дополнительно введены блок усиления, второй нелинейный преобразователь, третий блок задержки, восьмой блок умножения, первый, второй и третий блоки памяти, последовательно соединенные четвертый блок умножения, первый нелинейный преобразователь, пятый блок умножения, четвертый блок суммирования, шестой и седьмой блоки умножения, выход первого блока задержки соединен с входом четвертого блока умножения, выход которого соединен с вто . рыми входами настраиваемой модели объекта и второго нелинейного преобразователя, второй выход настраиваемой модели объекта соединен с третьими входами первого и второго нелинейных преобразователей, первые входы которых соединены с первым входом настраиваемой модели объекта, второй нелинейный преобразователь
последовательно соединен с восьмым блоком умножения и вторым входом четвертого блока суммирования, выход которого соединен с входом третьего блока задержки, выход которого соединен с вторым входом восьмого блока умножения, выход седьмого блока умножения соединен с вторым,входом первого блока умножения и первым входом третьего блока умножения, выход шестого блока умножения соединен с вторым входом третьего блока умножения, выход третьего блока суммирования соединен с блоком усиления, выход которого соединен с входами второго блока задержки и блока обращения матрицы, входы первого, второго и третьего блоков памяти соединены с генератором тактовых импульсов, выход первого блока памяти соединен с вторыми входами четвертого и пятого блоков умножения, выход второго блока памяти соединен с вторым входом шестого блока умножения и третьим входом настраиваемой модели объекта, выход третьего блока памяти соединен с вторым входом седьмого блока умножения.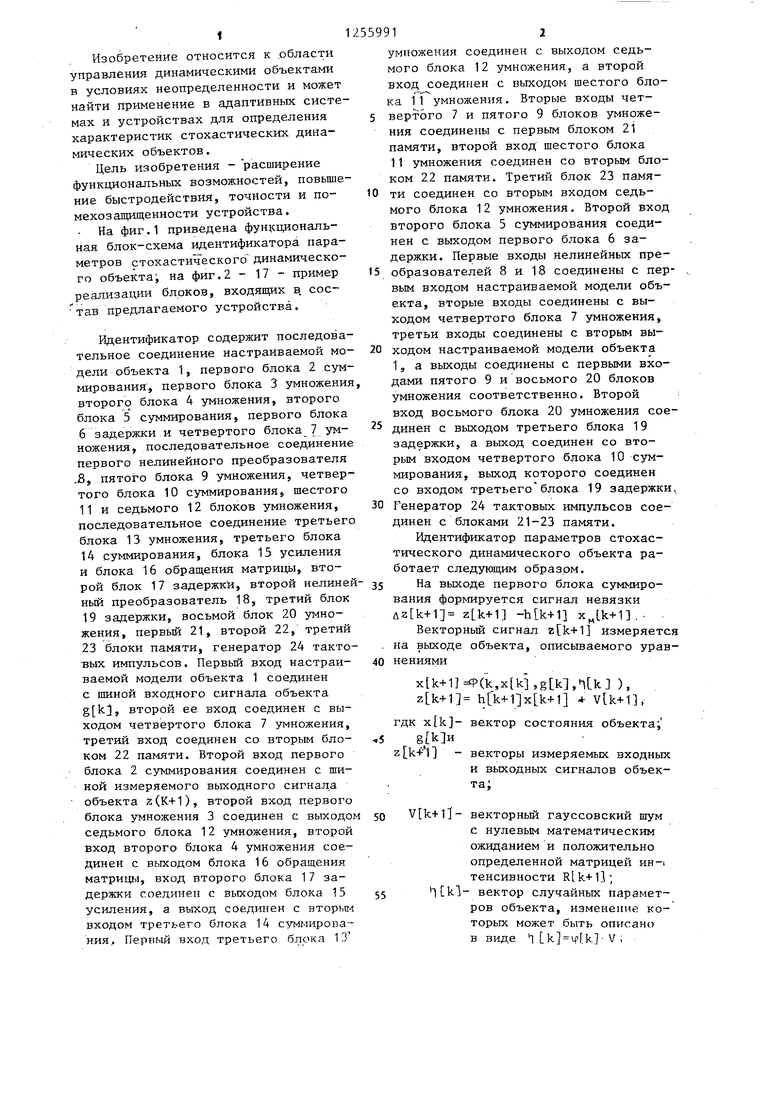




| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОКРЫТИЯ ИНФОРМАЦИИ | 2014 |
|
RU2546307C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| Устройство для умножения чисел в модулярной системе счисления | 1989 |
|
SU1667065A1 |
| Устройство для определения ядер нелинейных объектов | 1981 |
|
SU1008747A1 |
| Устройство многолучевого приема ультразвуковых сигналов | 2015 |
|
RU2631049C2 |
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282874C2 |
| Адаптивная система управления с фильтр-корректором для динамических объектов с периодическими коэффициентами | 2015 |
|
RU2624489C2 |
| НЕЙРОСЕТЕВОЙ ПРЕОБРАЗОВАТЕЛЬ КОДА В ЧАСТОТУ | 2013 |
|
RU2540823C1 |
| Комбинированная адаптивная система управления с фильтр-корректором для априорно неопределенных динамических объектов с периодическими коэффициентами | 2015 |
|
RU2622674C1 |



-Г
. . /
S Off f
И
xJ
.
i
S2f,MfM
J2fM4 M
блок 9
K
ro
фиг.5
SMXJO
7П f,w
xhK tJ
a-1
гз-г
(pvg.
ft
Ziiiix yM
л Чк
/.
5 г7Ж//
Фиг. 8 f2
/7-/ f/,v.
/i. (--I
Л7-/
.
Фиг.9
/-Y/rV7
-I
Л7-/
,.
/J-J
p-r,
фиг. 10
& o/fi/ 74
rs
77
/лг/х-У
гг
Фиг. //
| Саридис Дж | |||
| Самоорганизующиеся стохастические системы управления | |||
| М.: Наука, 1980, с.164-170 | |||
| Цьшкин Я.З | |||
| Основы теории обучающихся систем | |||
| М.J Наука, 1970, с.40-45 | |||
| Петров А.И | |||
| Синтез оптимальных самонастраивающихся систем стабилизации динамических характеристик по статистическому критерию качества.- Известия АН СССР | |||
| Техническая кибернетика, 1970, № 2, с.222-233 | |||
| Балашов Е.П.,Пузанков Д.В | |||
| Микропроцессоры и микропроцессорные системы | |||
| М.: Радио и связь, 1981, с.326 | |||
| Справочник Io нелинейным схемам | |||
| Под ред | |||
| М.М | |||
| Шейнголда | |||
| Мир, 1977, ;.523. |
