управления 20 датчиком положения ротора. Выход 25 Д 23 подключен к входу силового ключа 19 и через генератор импульсов 21 - к входу ключа управления 20. В процессе работы при превышении напряжения датчика частоты вращения над величиной опорного напряжения порогового устройства 22 Д 23 отключает секции 13,
. . .
Изобретение относится к электротехнике в частности к электродвигателям с электронной коммутацией вен тильньм двигателем (ВД).
Цель изобретения - повышение надежности путем уменьшения числа ступеней регулирования и соответствующего .числа заЕмьщателей.
Ндфиг.1 приведена функциональная схема тягового ВД; на фиг.2 - его характеристики.
Устройство содержит клеммы и 2 цеци питания, силовые ключи 3 - 8 , коммутатора, датчик 9 положения ротора, индуктор 10 двигателя, датчик 1I частоты вращения, последовательно соединенные секции 12 и 13 одной фазы обмотки якоря, секции .14,15 и 16,17 соответственно второй и третьей фаз обмотки якоря, силовые ключи 18 и 19 замь кателей, ключ 20 управления датчиком положения ротора, генератор 21 иьшульсов, пороговое устройство 22, дешифратор 23, выходы 24 и 25 дешифратора и. входы 26 и 27 ключа 20.
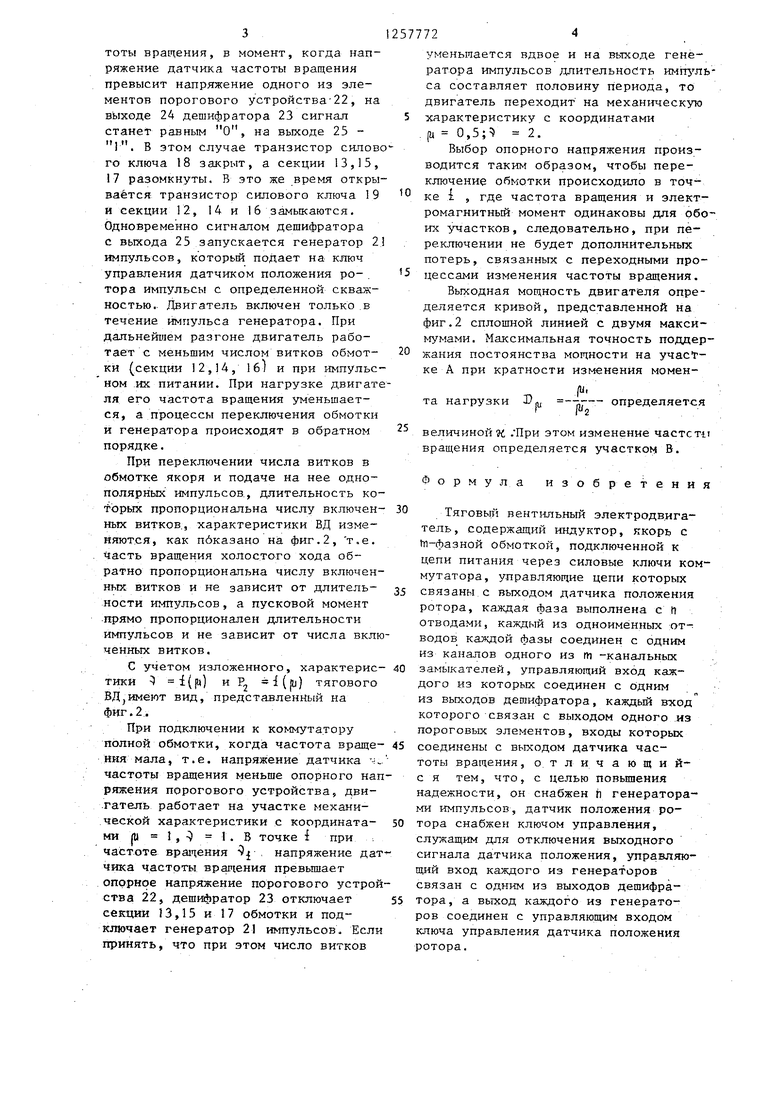
На фиг.2 приняты обозначения: - частота вращения , Ш момент нйгрузкл} Р - мощность двигателя на валу; ЭЕ - допустимая погрешность поддержания постоянства мощности, , , , - координаты характерных точек механической характеристики; А - диапазон изменения мом.ента нагрузки при заданной погрености эе.
На фиг.1 представлен трехфазный вариант тягового ВД. Каждая фаза обмотки состоит из двух секций (соответственно по фазам 12 и t3, 14 и 15, 16 и 17) с отводами, которые
57772
15 и 17 обмотки и подключает генератор импульсов 21. Двигатель цри этом переходит на другую механическую характеристику. Выбор опорного напряжения производится таким образом, чтобы избежать дополнительных потерь, связанных с переходными процессами изменения частоты вращения . 2 ил.
соединены с управляющими входами силовых ключей 18,19, состоящих из транзистора и трехфазного диодного моста.
Обмотка подключена к выходу трехфазного коммутатора, собранного на щести транзисторных силовых ключах 3-8, управляемых датчиком 9 положения ротора, .механически связанный с индуктором 10. Выход датчика частоты вращения связан с входами порогового устройства 22, образованного И пороговыми элемент ами, дешифра- тором 23 и ключом 20 управления датчиком положения ротора. Дешифратор в данном случае представляет собой триггер с одним устойчивым положением, на выходах 24 и 25 которого сигналы принижают значения
О и 1. Выход 24 дешифратора связан с входом замыкателя 18 и входом 26 ключа управления датчика положения ротора. Выход 25 подключен к входу силового ключа 19 и через генератор 21 импульсов к входу 27 ключа 20 управления.
ВД работает следующим образом. В исходном состоянии при частоте вращения, равной нулю, на выходе 24
дешифратора 23 сигнал равен 1, а на вьпсоде 25 - О, п ри этом ключ 20 и силовой ключ 18 замыкателя открыты, т.е. на датчик положения ротора подается напряжение питания,
а выводы секции 13,15 и 17 замкнуты между собой. При подаче напряжения на клеммы 1 и 2 ВД разгоняется под действием электромагнитного момента полной обмотки с двумя последовательно включенными секциями каждой фазы. При увеличении час
тоты вращения, в момент, когда напряжение датчика частоты вращения превысит нанряжение одного из элементов порогового устройства-22, на выходе 24 дешифратора 23 сигнал станет равным О, на выходе 25 - 1. В этом случае транзистор силово го ключа 18 закрыт, а секции 13,15, 17 разомкнуты. В это же время открывается транзистор силового ключа 19 и секции 12, 14 и 16 замыкаются. Одновременно сигналом дешифратора с вькода 25 запускается генератор 2 импульсов, который подает на ключ управления датчиком положения ро-. тора импульсы с определенной скважностью.. Двигатель включен только .в течение импульса генератора. При дальнейшем разгоне двигатель работает с меньшим числом витков обмотки (секции 12,14, 16} и при импульсном их питании. При нагрузке двигателя его частота вращения уменьшается, а процессы переключения обмотки и генератора происходят в обратном порядке.
ПРИ переключении числа витков в обмотке якоря и подаче на нее одно- полярных импульсов., длительность которых пропорциональна числу включенных витков., характеристики БД изменяются, как пбказано на фиг. 2, т.е. Часть вращения холостого хода обратно пропорциональна числу включенных витков и не зависит от длительности импульсов, а пусковой момент прямо пропорционален длительности импульсов и не зависит от числа включенных витков.
С учетом изложенного, характеристики i{|ii) (1 тягового ВД имеют вид, представленный на фиг.2.
При подключении к коммутатору полной обмотки, когда частота вращения мала, т.е. напряжение датчика ч. частоты вращения меньше опорного нап ряжения порогового устройства, дви- татель работает на участке механической характеристики с координатами Ш }, Г . В точке i при -. частоте вршпения , напряжение датчика частоты врадения превьш ает опорное напряжение порогового устройства 22, дешифратор 23 отключает секции 13,15 и 17 обмотки и подключает генератор 21 импульсов. Если принять, что при этом число витков
577724
уменьшается вдвое и на ВБГХоде генератора импульсов длительность импз ль- са составляет половину периода, то двигатель переходит на механическую 5 характеристику с координатами . (Ц 0,5; 2.
Выбор опорного напряжения производится таким образом, чтобы переключение обмотки происходило в точ ке i , где частота вращения и электромагнитный момент одинаковы для обоих -участков, следовательно, при переключении не будет дополнительных потерь, связанных с переходными про 5 цессами изменения частоты вращения.
Выходная мощность двигателя определяется кривой, представленной на фиг.2 сплошной линией с двумя максимумами. Максимальная точность поддер20 жания постоянства мощности на участке А при кратности изменения момен/
та нагрузки
И,
определяется
f2
величиной 9i . При этом изменение чаетеTti вращения определяется участком В.
Формула изобретения
Тяговьгй вентильный электродвигатель, содержащий индуктор, якорь с tn-фазной обмоткой, подключенной к цепи питания через силовые ключи коммутатора, управляющие цепи которых
5 связаны с выходом датчика положения ротора, каждая фаза выполнена с П отводами, каждый из одноименных отводов каждой фазы соединен с одним из каналов одного из т -канальных
0 замыкателей, управляющий вход каждого из которых соединен с сгдним из выходов дешифратора, каждый вход которого связан с выходом одного из пороговых элементов, входы которых
5 соединены с выходом датчика частоты вращения, о. т л и ч а ю щ и йс я тем, что, с целью повьш1ения
надежности, он снабжен h генераторами импульсов, датчик положения ро0 тора снабжен ключом управления, служащим для отключения выходного сигнала датчика положения, управляющий вход каждого из генераторов связан с однш из выходов дещифра5 тора, а выход каждого из генераторов соединен с управляющим входом ключа управления датчика положения ротора.
0.5 JUi
f ui.l
/ yw
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1988 |
|
SU1663714A1 |
| Вентильный двигатель | 1975 |
|
SU692013A1 |
| Стабилизированный вентильный электродвигатель | 1981 |
|
SU1007160A1 |
| Вентильный электродвигатель | 1987 |
|
SU1427508A2 |
| Вентильный электродвигатель | 1977 |
|
SU743129A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Вентильный электродвигатель | 1980 |
|
SU877726A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
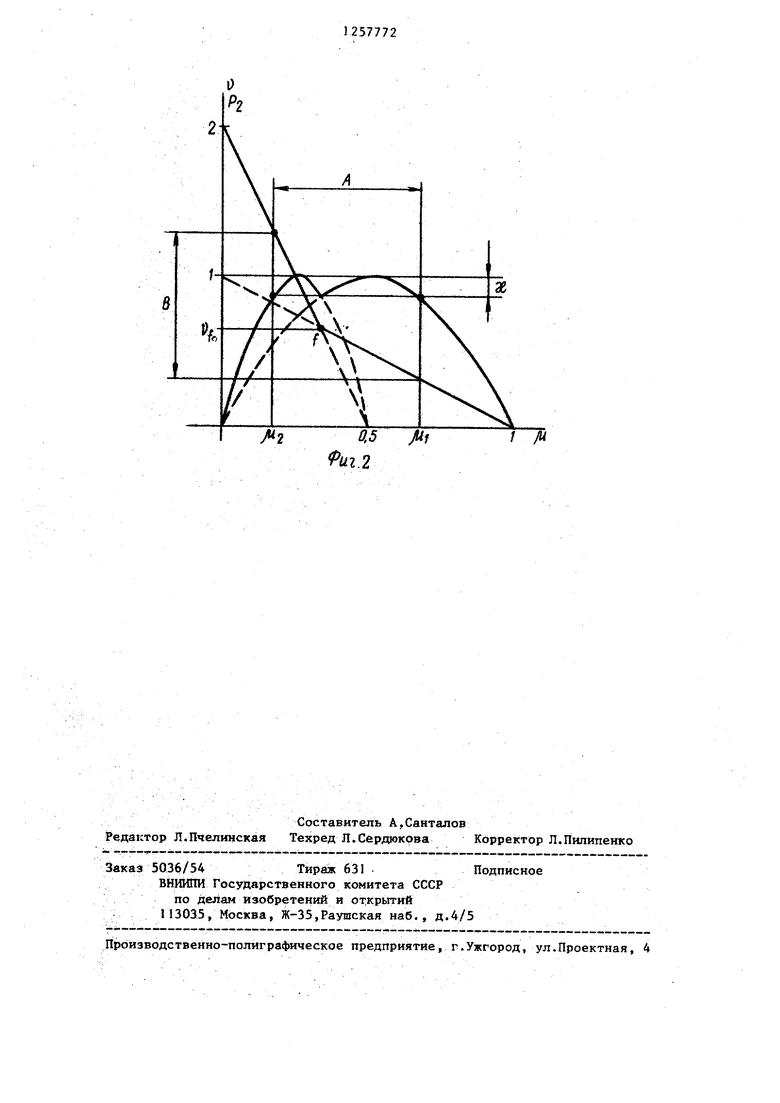
Изобретение относится к электротехнике, в частности к электродвигателям с электронной коммутацией, вентильным двигателям. Целью изобре- тения является повышение надежности за счет уменьшения числа ступеней регулирования и соответствующего числа замыкателей. Каждая фаза обмотки электродвигателя состоит из двух секций, соответственно по фазам 12 и 13, 14 и 15, 6 и 17 с отводами, которые соединены с управляющими входами силовых ключей 18 и 19. Обмотка подключена к выходу трехфазного коммутатора, собранного на шести транзисторных силовых клю- чг1х 3-8. Эти ключи управляются датчиком положения 9 ротора, механически связанным с индуктором 10. Выход датчика 11 частоты вращения связан с входами порогового устройства 22 дешифратором (Д) 23 и ключом управления 20 датчиком положения ротора. На выходах 24,25 дешифратора сигналы принимают значения, равные нолю и единице. Выход 24 Л связан с входом замыкателя 18 и входом 26 ключа л с ю сд J -vl 1 to
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1978 |
|
SU743131A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электродвигатель | 1979 |
|
SU845234A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каган В.Г., Рояк С.Л., Боченков Б.М | |||
| , Шраменко С.Г | |||
| Транзисторные приводы с бесконтактными синхронными двигателями для станков с ЧПУ | |||
| - Электротехническая промьшшенность | |||
| Сер.Электропривод, 1984, вьт.1, с.11-14. | |||
