Изобретение относится к вентильным электродвигателям (ВД) и может быть использовано в системах микропривода.. Известны (ВД), состоящие из.элек тромеханического преобразователя с ротором в виде постоянного магнита и.- фазным статором, датчика угловой координаты, широтно-импульсного модулятора (или модуляторов) и коммутатора. Датчик угловой координаты вырабатывает фазные позицион ные сигналы, которые через модулято ры формируют напряжения управления коммутатором, а следовательно, и пр образователем l и 2j. Недостаток таких ВД заключается в том, что при изменении загрузки (следовательно, и тока и частоты вращения изменяются составляющие па дения напряжений на обмотках, обусловленные их индуктивностью/вследствие чего угол между результирующей (не) и потоком ротора также изменяется, отклоняясь от оптимальног равногоТ5/2. Поэтому такие ВД имеют пониженную экономичность и быстродействие . Этот недостаток частично устране в ВД с управлением формой тока по сигналам от датчика угловой координа- ты, что стабилизирует взаимоориентацию потоков статора и ротора преобразователя. В первом типе таких ВД применены фазные регуляторы тока с обратной связью. В них токи от специальных датчиков в выходных цепях коммутатора отслеживают сигналы от датчика угловой координаты, которые предпочтительно иметь синусоидальными Р}Недостаток таких ВД - Их сложность обусловленная необходимостью применения датчиков фазных токов с изолированными выходными цепями и с линейной симметричной характеристикой, а также необходимостью получения сигналов специальной фор№а от датчика угловой координаты. В другом типе токовых ВЙ предусмотрен один токовый контур с включением датчика тока в цепь питания коммутатора 4 J. Однако такое упрощение структуры ВД по сравнению с лервым типом достигается ценой отказа от регулирования формы тока, которая фиксируется как прямоугольная, что снижает зкономичность ВД.
Наиболее близким к предлагаемому по технической сущности и решаемой Задаче является ВД, содержащий ротор с источником однонаправленной намаг нчивающей силы статор с обмоткой секции которой соединены с выходом коммутатора, управляющие цепи ключей которого соединены с выходом датчика положения ротора, выполненного в виде сельсина-фазовращателя, через функциональный преобразователь, содержащий стробопреобразователь, первый вход которого соединей с выходом генератора опорных сигналов, а второй вход - с выходом датчика частоты йращения,. и широтно-импульсный модулятор f 5 J.
Недостатком известного ВД является грубоприближенный характер регулирования, при котором изменения нагрузки и скорости раздельно не учиты ваются. Это снижает экономичность и быстродействие таких БД, так как значение угла между током и ЭДС отличается от оптимального,
Цель изобретения - повышение экономичности- и быстродействия ВД.
Для достижения указанной цели в ВД дополнительно введены два регулятора амплитуды сигналов переменного тока два сумматора, фазосдвигающая на 1&/2- и инерционная цепочки и перемножитель сигналов, причем выход датчика подключен через .первый регулятор на первый вход первого сумматора и параллельно через фазовращающую цепочку и второй регулятор - на второй вход первого сумматора, выход которого соединен со входом стробопреобразователя, а источник управляющего сигнала подключен к . управляющему входу первого регулятор и параллельно через второй сумматор, инерционную цепочку и перемножитель сигналов - к управляющему входу второго регулятора, кроме того, ко второму входу второго сумматора и ко второму входу .перемножителя сигналов подключен источник аналогового сигнала скорости.
Такое усовершенствовани-е обеспечивает оптимизацию пространственного угла между взаимодействующими потоками преобразователя и обеспечивает тем самым повьпаение .его экономичности и быстродействия во всем диапазоне изменения нагрузки и скорости вращения. Причем оно не связано с выбором средств формирования, напряжения коммутатора.
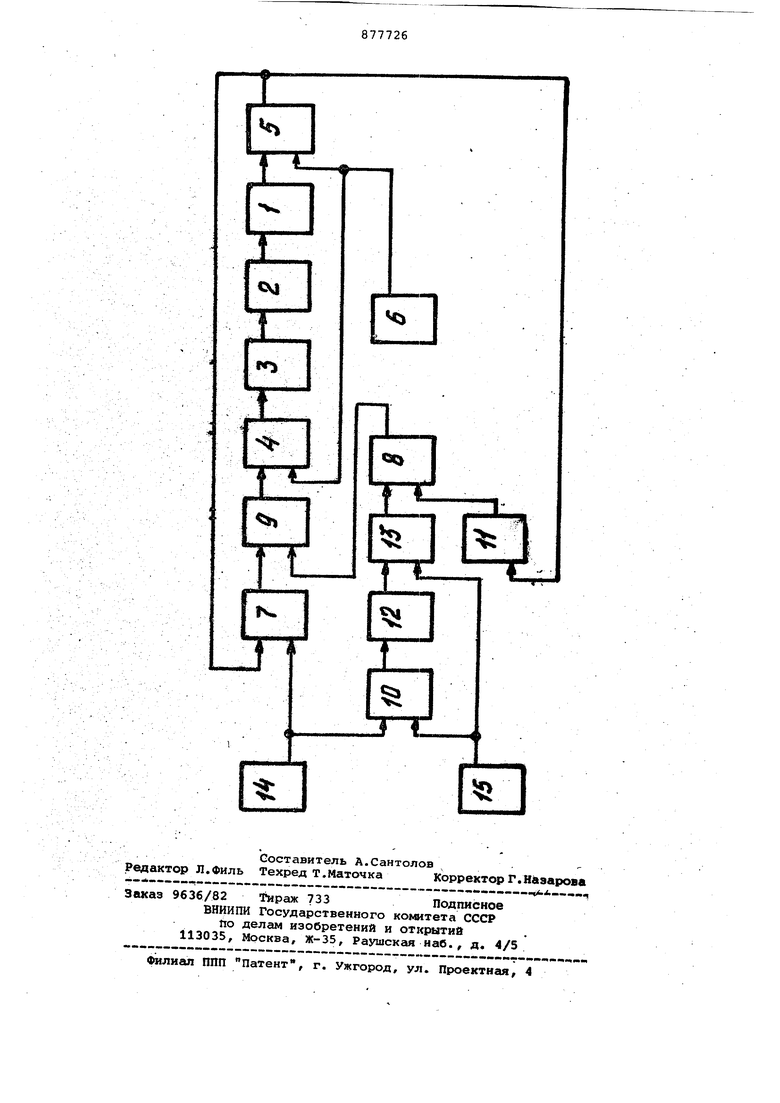
На чертеже представлена структурная схема БД,
Устройство состоит из электромеханического преобразователя 1 с статором и ротором из постоянного Магнита, коммутатора 2, широтноимпульсоного модулятора 3, стробопреобразователя 4 (по числу фазных каналов управления) ,датчика 5 по
типу сельсина-фазовращателя и источника б опорных сигналов. Крдме того, ВД имеет два регулятора 7 и 8 амплитуды сигнала датчика 5, два сумматора 9 и10, фазосмещающую цепочку 11 и инерционную цепочку 12, а также перемножитель 13 сигналов. В схеме Iпредусмотрены источник 14. управляющего сигнала и источник 15 аналогового сигнала скорости. Преобразователь 1, как обычно, включен на вход коммутатора 2, ко входу которого через модулятор 3 подключен стробопреобразователь 4. Датчик 5 укреплен на валу преобразователя 1, а источник
6подключен к стробопреобразователю 4 и к обмоткам датчика 5. Выход датчика 5 через регулятор 7 амплитуды подключен на первый вход сумматора 9 и параллельно через фазосдвигающую на Г/2 цепочку 11 и регулятор 8 - ко второму входу сумматора 9, а источник 14 управляющего сигнала подключ:ен к управляющему входу регулятора
7и параллельно через сумматор 10, инерционную цепочку 12 и перемножитель 13 - к управляющему входу регулятора 8. Кроме того, ко второму входу сумматора 10 и ко второму вход перемножителя 13 подключен источник 15 сигнала скорости, ааход сумматора 9 соединен со входом стробопреобразователя 4.
При холостом ходе двигателя или нулевой скорости вращения выходной сигнал перемножителя 13 равен нулю, и сумматор 9 вырабатывает сигнал, амплитуда котЬрого пропорциональна выходному сигналу источника 15, а фаза совпадает с фазой сигнала датчика 5, который установлен так, что вектор.напряжения и поток статора опережают поток ротора ла 7f/2, что соответствует отпимадьному электромеханическому предбразованию энергии При увеличении скорости (но отсутствии отгрузки это условие сохраняется, так как выходной сигнал перемно жителя 13 равен нулю. То же самое имеет место при нагрузке и при нулевой скорости. Во всех этих случаях вектор напряжения должен совпадат с потоком статора, поскольку влияние индуктивности обмоток не проявляется.
В общем случае «а первый вход перемножителя 13 поступает сигнал разности между выходными сигналами источников 14 и 15. Этот сигнал разности пропорционален току преобразователя 1. Перемножитель 13 вырабатывает сигнал, пропорциональный произведению тока на скорость, т.е. индуктивному падению напряжения на обмотках преобразователя 1, а регулятор 8 добавляет в сумматор 9 сигнал переменного тока с амплитудой, пропорциональной упомянутому падению напряжения, и с фазой, опережающей на 1С/2 сигнал регулятора 7. в резул тате выходной сигнал сумматора 9. увеличивается и изменяет фазу в сто рону опережения в той мере, которая обеспечивает точную компенсацию . действия индуктивности обмоток при данной скорости и нагрузке преобраз вателя 1. Механическая характеристика ВД п Unr и- аналогична характеристике коллекторного двигателя, т.е. линей на, а ток двигатели зависит только от нагрузки, причем строго линейно, способствует повышению быстродействия. Испытания макета ВД подтв дили эти выводы, при этом КПД преобразователя увеличился на 2-10% в зависимости от диапазона изменения скорости и нагрузки. Все узлы управления БД реализуют ся на типовых микросхемах, логических элементах, операционных усилителях и аналоговых ключах, что обес печивает малое потребление энергии и малую массу устройства. Формула изобретения Вентильный электродвигатель, содержащий ротор с источником, однонап равленной намагничивающей силы, ста тор с обмоткой, секции которой соед нены с выходом коммутатора, управляющие цепи ключей которого соедине с выходом датчика положения рЪтора, выполненного в виде сельсина-фазовращателя, через функциональный пре образователь, содержащий стробопреобразователь, первый вход которого соединен с выходом генератора опорных сигналов, а второй вход - с выходом датчика частоты вращения, и широтно-импульсный ь/юдулятор, о т личающийся- тем, что, с целью повышения экономичности и быстродействия, в него дополнительно введены два регулятора амплитуды сигналов переменного тока, два сум- „ матора фазовращающая на 7Г/2 и инерционная цепочки и перемножитель сигналов, причем выход датчика подключен через первый регулятор на первый вход первого сумматора и параллельно через фазовращающую цепочку и .второй регулятор,- на второй вход первого сумматора, выход которого соединен со входом стробопреобразователя, а источник управляющего сигнала подключен к управляющему входу первого регулятора и параллельно через второй сумматор, инерционную цепочку и перемножитель сигналов - к управляющему входу второго регулятора, кроме того, ко второму входу второго сумматора и ко второму входуперемножителя сигнсшов подключен Источник аналогового сигнала скорости. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 224653, кл. Н 02 Р 5/16, 12.06.68. 2.Головицкий В.А.гКулачев В.А., Ровно Ю.Н. Устройство управления бесколлекторным двигателем постоянного тока на силовых интегральных схемах. Электронн;ая техника в автоматике. Под ред. Ю.И.Конева Вып. 4,М., Советское радио, 1973, с. 34. 3.Бродовский В.И., Иванов B.C. Приводы с частотно-токовым управлением. М., Энергия, 1974. 4. Леоненко Л.Н., Овсянников О.О. О допустимых ограничениях выходного тока усилителей в электроприводах. Электронная техника в автоматике. Под ред. Ю,И.Конева, Вып. 7, М. , Советское радио, 1975, с. 89. 5. Авторское свидетельство СССР 379031,кл. Н 02 Р 5/16, 27,05.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Система автономного электроснабжения | 1985 |
|
SU1343537A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |