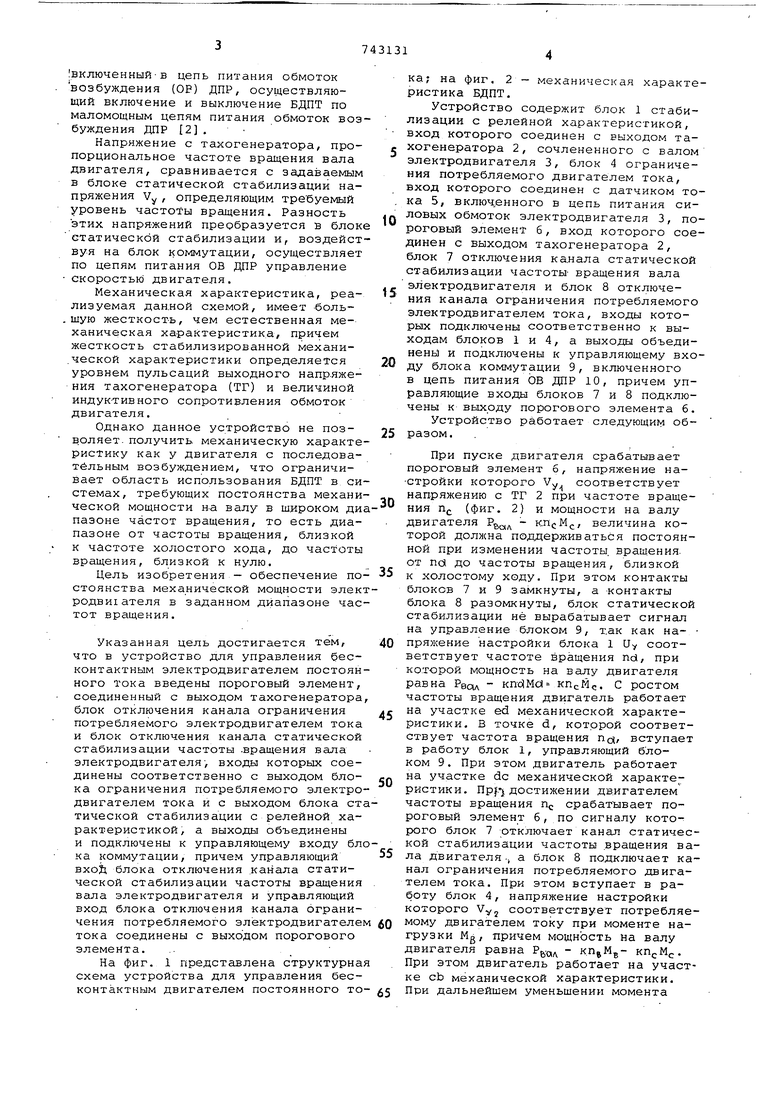
1включенный-в цепь питания обмоток возбуждения (ОР) ДПР, осуществляющий включение и выключение БДПТ по маломощным цепям питания обмоток возбуждения ДПР 2. Напряжение с тахогенератора, пропорциональное частоте вращения вала двигателя, сравнивается с задаваемым в блоке статической стабилизации напряжения Vy, определяющим требуемый уровень частотгы вращения. Разность этих напряжений преобразуется в блоке статической стабилизации и, воздействуя на блок коммутации, осуществляет по цепям питания ОВ ДПР управление скоростью двигателя. Механическая характеристика, реализуемая дан.ной схемой, имеет -боль. Шую жесткостъ, чем естественная механическая характеристика, причем жесткость стабилизированной механи.ческой характеристики определяется уровнем пульсаций выходного напряжения тахогенератора (ТГ) и величиной индуктивного сопротивления обмоток двигателя. Однако данное устройство не позволяет, получить механическую характе ристику как у двигателя с последовательным возбуждением, что ограничивает область использования БДПТ в си стемах, требующих постоянства механи ческой мощности н-а валу в шкроком ди пазоне частот вращения, то есть диапазоне от частоты вращения, близкой к частоте холостого хода, до частоты вращения, близкой к нулю. Цель изобретения - обеспечение по стоянства механической мощности элек родвигателя в заданном диапазоне час тот вращения. Указанная цель достигается тем, что в устройство для управления бесконтактным электродвигателем постоян ного Тока введены пороговый элемент, соединенный с выходом тахогенератора блок отключения канала ограничения потребляемого электродвигателем тока и блок отключения канала статической стабилизации частоты .вращения вала электродвигателя, входы которых соединены соответственно с выходом блока ограничения потребляемого электро двигателем тока и с выходом блока ст тической стабилизации с релейной характеристикой, а выходы объединены и подключены к управляющему входу бл ка коммутации, причем управляющий Bxoji блока отключения канала статической стабилизации частоты вращения вала электродвигателя и управляющий вход блока отключения канала ограничения потребляемого электродвигателе тока соединены с выходом порогового элемента. ... На фиг. 1 представлена структурна схема устройства для управления бесконтактным двигателем постоянного то ка на фиг, 2 - механическая характеристика БДПТ. Устройство содержит блок 1 стабилизации с релейной характеристикой, вход которого соединен с выходом тахогенератора 2, сочлененного с валом электродвигателя 3, блок 4 ограничения потребляемого двигателем тока, вход которого соединен с датчиком тока 5, включенного в цепь питания силовых обмоток электродвигателя 3, пороговый элемент 6, вход которого соеинен с выходом тахогенератора 2, блок 7 отключения канала статической стабилизации частоты- вращения вала электродвигателя и блок 8 отключения канала ограничения потребляемого электродвигателем тока, входы которых подключены соответственно к выходам блоков 1 и 4, а выходы объединены и подключены к управляющему входу блока коммутации 9, включенного в цепь питания ОВ ДПР 10, причем управляющие входы блоков 7 и 8 подключены к выходу порогового элемента 6. Устройство работает следующим образом. При пуске двигателя срабатывает пороговый элемент б, напряжение настройки которого Vy соответствует напряжению с ТГ 2 при частоте вращения Hj, (фиг. 2) и мощности на валу двигателя Р - КП(-К, величина которой должна поддерживаться постоянной при изменении частоты, вращения, от пси до частоты вращения, близкой к холостому ходу. При этом контакты блоков 7 и 9 замкнуты, а контакты блока 8 разомкнуты, блок статической стабилизации не вырабатывает сигнал на управление блоком 9, т.ак как на- пряжение настройки блока 1 Uy соответствует частоте вращения nd, при которой мощность на валу двигателя равна РВОЛ кп-о|Мо1 кПсМс. С ростом частоты вращения двигатель работает на участке ed механической характеристики. В точке д., которой соответствует частота вращения По(, вступает в работу блок 1, управляющий блоком 9. При этом двигатель работает на участке dc механической характеристики, npf.-j достижении дв.игателем частоты вращения п срабатывает пороговый элемент 6, по сигналу которого блок 7 отключает канал статической стабилизации частоты вращения вала двигателя ., а блок 8 подключает канал ограничения потребляемого двигателем тока. При этом вступает в работу блок 4, напряжение настройки которого Vyj соответствует потребляемому двигателем току при моменте нагрузки Mg, причем мощность на валу двигателя равна Р.. - кПсМр. При этом двигатель работает на участке сЬ механической характеристики. При дальнейшем уменьшении момента
нагрузки, начиная с точки Ь на механической характеристике, блок 4 прекращает вырабатывать сигнал на управ-тезние блоком 9, и двигатель переход т на участок аЬ механической характеристики. При увеличении момента нагрузки от нуля до пускоцого работа устройства происходит в обратной последовательности. Уровни настройки блоков 1, 6 и 4 выбираются так, чтобы выполнялись условия (ng Мб ПдМс( 1псМ ПбМб
Эти условия соответствуют равенствам площадей , , .(фиг. 2), что определяет принадлежность точек Ь, c,d на механической ха рактеристике двигателя к линии равной мощности.
Данное устройство за счет обеспечения вида механической характеристики (фиг. 2), ограничивающей участки равновеликой площади, позволяет осуществлять регулирование с постоянной мощностью, что в ряде случаев улучшает энергетические характеристики всей системы питания, снижает установленную мощность первичного питания.
Кроме того, оно может использоваться для управления БДПТ с любыми схемами обмоток. Так как управление двигателя осуществляется по маломощной цепи питания ОВ ДПР, то исключается необходимость коммутации силовой цепи и, следовательно, повышается надежность работы устройства.
Структура силовых цепей БДПТ в процессе управления двигателем не изменяется, что исключает необходимость поворота осей ДПР относительно осей двигателя.
Формула изобретения
Устройство для управления бескон- j тактным электродвигателем постоянного тока, содержащее канал статической
стабилизации частоты вращения вала электродвигателя, состоящий из блока статической стабилизации с релейной характеристикой, вход которого подключен к выходу тахогенератора, сочлененного -с валом электродвигателя, блока коммутации, включенного в цепь питания обмоток возбуждения датчика положения ротора, и канал ограничения потребляемого электродвигателем тока, включающий блок ограничения потребляемого электродвигателем тока, вход которого подключен к датчику тока, включенному в цепь питания силовых обмоток электродвигателя, о т личающе-еся тем, что, с целью обеспечения постоянства механической мощности электродвигателя в заданном диапазоне частот вращения вала электродвигателя, в устройство введены пороговый элемент, соединенный с выходом тахогенератора, блок отключения канала ограничения потребляемого электродвигателем тока и бло отключения канала статической стабилизации частоты вращения вала электродвигателя, входы которых соединены соответственно с выходом блока ограничения потребляемого электродвигателем тока и с выходом блока статической стабилиза:ции с релейной характеристикой, а выходы объединены и подключены к управляющему входу блока коммутации, причем управляющий вход блока отключения канала статической стабилизации частоты вращения вала электродвигателя и управляющий вход блока отключения канала ограничения потребляемого электродвигателем тока соединены с выходом порогового элемента.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 535876, кл. Н 02 К 29/02, 1976.
2.Овчинников И.Е., Лебедев Н.И. Бесконтактные двигатели постоянного тока автоматических устройств. Л.,
Наука, 1966, с. 111.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU845234A1 |
| Вентильный электродвигатель | 1982 |
|
SU1065979A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1972 |
|
SU468346A1 |
| Бесконтактный привод постоянного тока | 1975 |
|
SU655037A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Бесконтактный электродвигатель постоянного тока | 1974 |
|
SU600669A2 |
| Бесконтактный электродвигатель постоянного тока | 1974 |
|
SU535676A1 |
| Система для статической стабилизации частоты вращения бесконтактного двигателя постоянного тока | 1976 |
|
SU681514A1 |

