Изобретение относится к электротехнике, а точнее к управляемым электроприводам, и может использоваться при построении глубокорегулируемых частотно-управляемых электроприводов с короткозамкнутым асинхронным электродвигателем, содержащих полупроводниковые преобразователи частоты.
Цель изобретения - расширение диапазона регулирования частоты вращения асинхронного двигателя.
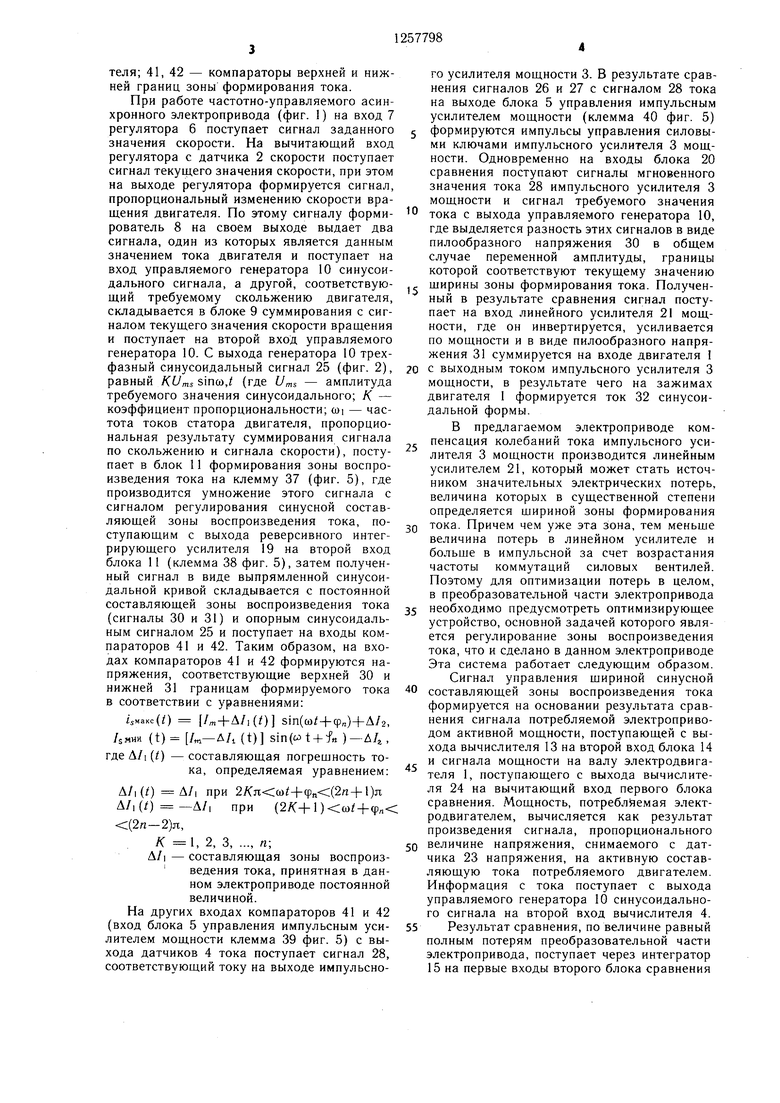
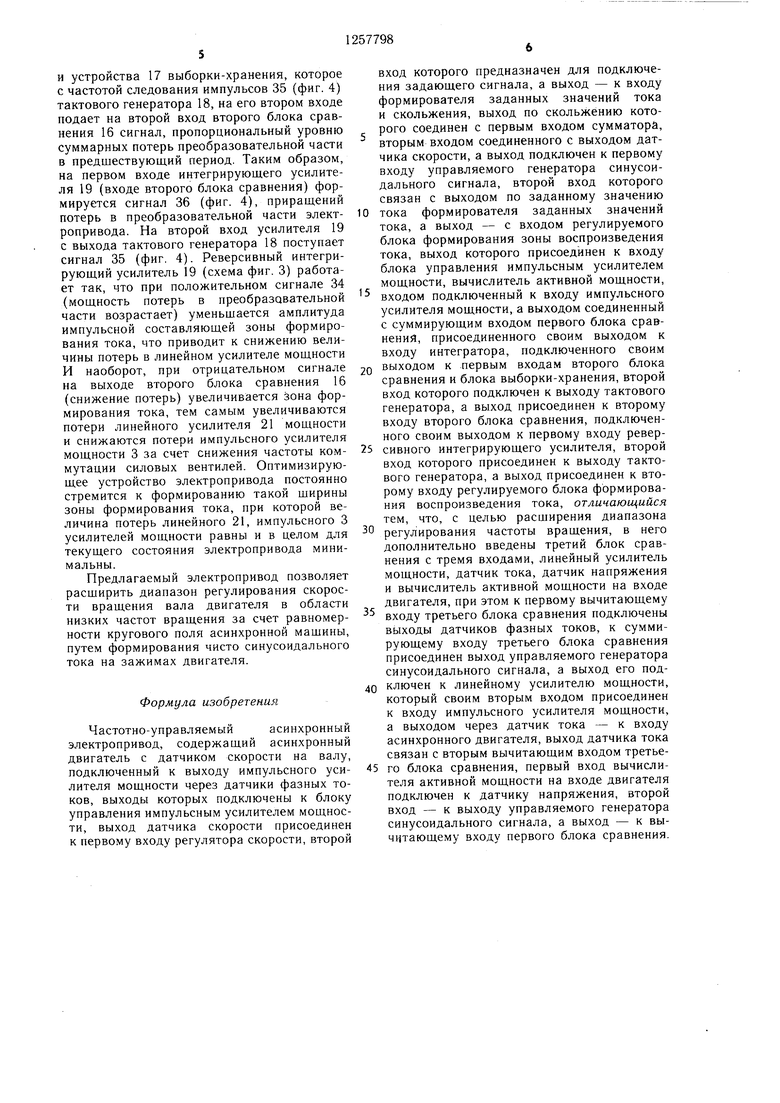
На фиг. 1 показана функциональная схема частотно-управляемого электропривода; на фиг. 2 - временные диаграммы, поясняющие принцип работы электропривода; на фиг. 3 - принципиальная электрическая схема реверсивного интегрирующего усилителя; на фиг. 4 - диаграммы, поясняющие принцип работы реверсивного интегрирующего усилителя; на фиг. 5 - принципиальная электрическая схема регулируемого блока формирования зоны воспроизведения тока и блока управления импульсным усилителем мощности.
Частотно-управляемыйасинхронный
электропривод {фиг. 1) содержит асинхронный двигатель 1 с датчиком 2 скорости на валу, подключенный к выходу импульсного усилителя 3 мощности через датчики 4 фазного тока, выходы которых подключены к блоку 5 управления импульсным усилителем, что структурно представляет собой замкнутую систему формирования тока в фагенератора 18, а выход блока 17 выборки- хранения присоединен ко второму входу блока сравнения 16, подключенного своим выходом к первому входу реверсивного интегрирующего усилителя 19, второй вход
которого присоединен к выходу тактового генератора 18. Выход реверсивного интегрирующего усилителя 19 соединен со входом регулируемого блока 11 формирования зоны воспроизведения тока. Третий блок сравне10 ния 20 принципиально выполнен так же как и первые два, и подключен первым вычитающим входом к выходам датчиков 4 фазного тока, суммирующим входом - к выходу управляемого генератора 10 синусоидального сигнала, а выходом - к входу линейного усилителя мощности 21, принципиальная схема которого представляет собой обычный стабилизатор тока охваченной отрицательной обратной связью с выхода датчика тока 22 на второй вычитающий вход третьего
2Q блока 20 сравнения. Датчик 23 напряжения подключен своим входом к зажимам двигателя 1, а выходом - к первому входу вычислителя 24 активной мощности на входе двигателя, второй вход которого подключен к выходу управляемого генератора 10 синусоидального сигнала, а выход - к вычитающему входу первого блока 14 сравнения. На фиг. 2 обозначено: 25 - сигнал требуемой формы фазного тока двигателя, снимаемый с выхода управляемого генератора 10; 26 и 27 - верхнее и нижнее порого15
25
зах двигателя. Датчик скорости 2, представ- 30 значения формируемого тока; 28 - ток
ляющий собой обычный тахогенератор, подключен своим выходом к первому входу регулятора 6 скорости, второй вход 7 которого предназначен для подключения задающего сигнала, а выход присоединен ко входу формирования 8 заданных значений тока и скольжения, выход по скольжению которого соединен с первым входом сумматора 9, вторым входом соединенного с выходом датчика 2 скорости, а выход подключен к первому входу управляемого генератора 10 синусоидального сигнала, второй вход которого соединен с выходом по заданному значению тока указанного формирователя 8. Выход управляемого генератора И) синусоидального сигнала соединен с входом регулируемого блока 11 формирования зоны воспроизведения тока, выход которого присоединен ко входу блока 5 управления импульсным усилителем мощности, принципиальная схема которого для одной фазы, приведена на фиг. 5. Ко входу 12 импульс35
на ВЕлходе импульсного усилителя и сигнала, снимаемого с выхода управляемого генератора 10; 30 и 31 - верхняя и нижняя границы зоны допустимых значений тока статора двигателя; 32 - сигнал управления линейным усилителем мощности; 33 - ток на зажимах асинхронного двигателя 1.
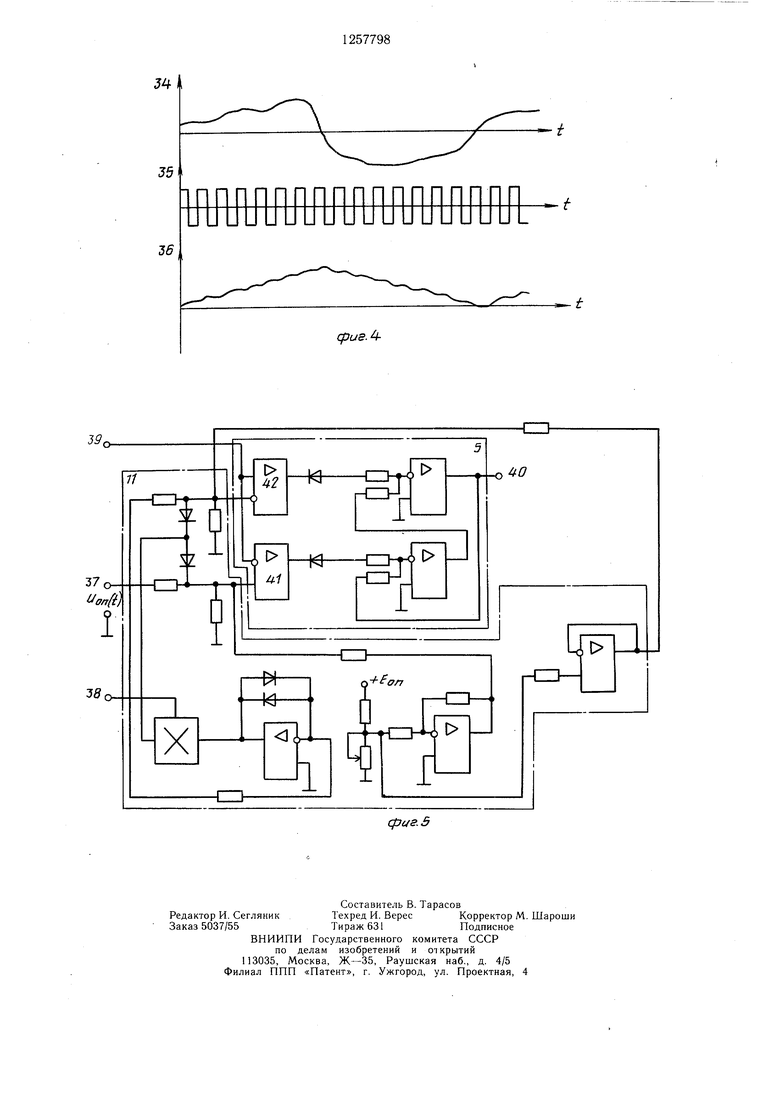
На фиг. 4 введены следующие обозначения: 34 - примерная диаграмма сигнала, снимаемого с выхода первого блока 14 сравнения; 35 - диаграмма сигнала, поступающего с выхода тактового генератора 18 на второй вход реверсивного интегрирующего усилителя 19; 36 - диаграмма сигнала на выходе второго блока сравнения 16.
На фиг. 5, содержащем принципиальные 45 электрические схемы регулируемого лока 11 формирования зоны воспроизведения тока и блока 5 управления импульсным усилителем мощности дл я одной фазы, обозначено: 37 - клемма для подключения опорного сигнала, поступающего с выхода управляе40
1-( ,- г -J - - f-
ного усилителя мощности подключен вход - мого генератора 10 синусоидального сигнала
вычислителя 13 активной входной мощности выход которого соединен с суммирующим входом первого блока 14 сравнения, присоединенного своим выходом ко входу интер- ратора 15, подключенного своим выходом к первым входам второго блока 16 сравнения и блока 17 выборки-хранения, второй вход которого подключен к выходу тактового
на первый вход блока 11; 38 - клемма для подключения сигнала управления синусной составляющей зоны воспроизведения тока, формируемого на выходе реверсивного интегрирующего усилителя 19; 39 - зажим для подключения сигнала с выхода датчика 4 тока; 40 - клемма для подключения цепей управления силовыми ключами преобразовагенератора 18, а выход блока 17 выборки- хранения присоединен ко второму входу блока сравнения 16, подключенного своим выходом к первому входу реверсивного интегрирующего усилителя 19, второй вход
которого присоединен к выходу тактового генератора 18. Выход реверсивного интегрирующего усилителя 19 соединен со входом регулируемого блока 11 формирования зоны воспроизведения тока. Третий блок сравне0 ния 20 принципиально выполнен так же как и первые два, и подключен первым вычитающим входом к выходам датчиков 4 фазного тока, суммирующим входом - к выходу управляемого генератора 10 синусоидального сигнала, а выходом - к входу линейного усилителя мощности 21, принципиальная схема которого представляет собой обычный стабилизатор тока охваченной отрицательной обратной связью с выхода датчика тока 22 на второй вычитающий вход третьего
Q блока 20 сравнения. Датчик 23 напряжения подключен своим входом к зажимам двигателя 1, а выходом - к первому входу вычислителя 24 активной мощности на входе двигателя, второй вход которого подключен к выходу управляемого генератора 10 синусоидального сигнала, а выход - к вычитающему входу первого блока 14 сравнения. На фиг. 2 обозначено: 25 - сигнал требуемой формы фазного тока двигателя, снимаемый с выхода управляемого генератора 10; 26 и 27 - верхнее и нижнее порого5
5
0 значения формируемого тока; 28 - ток
5
на ВЕлходе импульсного усилителя и сигнала, снимаемого с выхода управляемого генератора 10; 30 и 31 - верхняя и нижняя границы зоны допустимых значений тока статора двигателя; 32 - сигнал управления линейным усилителем мощности; 33 - ток на зажимах асинхронного двигателя 1.
На фиг. 4 введены следующие обозначения: 34 - примерная диаграмма сигнала, снимаемого с выхода первого блока 14 сравнения; 35 - диаграмма сигнала, поступающего с выхода тактового генератора 18 на второй вход реверсивного интегрирующего усилителя 19; 36 - диаграмма сигнала на выходе второго блока сравнения 16.
На фиг. 5, содержащем принципиальные 5 электрические схемы регулируемого лока 11 формирования зоны воспроизведения тока и блока 5 управления импульсным усилителем мощности дл я одной фазы, обозначено: 37 - клемма для подключения опорного сигнала, поступающего с выхода управляе0
,- г -J - - f-
мого генератора 10 синусоидального сигнала
на первый вход блока 11; 38 - клемма для подключения сигнала управления синусной составляющей зоны воспроизведения тока, формируемого на выходе реверсивного интегрирующего усилителя 19; 39 - зажим для подключения сигнала с выхода датчика 4 тока; 40 - клемма для подключения цепей управления силовыми ключами преобразователя; 41, 42 - компараторы верхней и нижней границ зоны формирования тока.
При работе частотно-управляемого асинхронного электропривода (фиг. 1) на вход 7 регулятора 6 поступает сигнал заданного значения скорости. На вычитающий вход регулятора с датчика 2 скорости поступает сигнал текущего значения скорости, при этом на выходе регулятора формируется сигнал, пропорциональный изменению скорости вращения двигателя. По этому сигналу формирователь 8 на своем выходе выдает два сигнала, один из которых является данным значением тока двигателя и поступает на вход управляемого генератора 10 синусоидального сигнала, а другой, соответствующий требуемому скольжению двигателя, складывается в блоке 9 суммирования с сигналом текущего значения скорости вращения и поступает на второй вход управляемого генератора 10. С выхода генератора 10 трехфазный синусоидальный сигнал 25 (фиг. 2), равный KUms sinco, (где Ums - амплитуда требуемого значения синусоидального; К - коэффициент пропорциональности; иц - частота токов статора двигателя, пропорциональная результату суммирования сигнала по скольжению и сигнала скорости), поступает в блок 11 формирования зоны воспроизведения тока на клемму 37 (фиг. 5), где производится умножение этого сигнала с сигналом регулирования синусной составляющей зоны воспроизведения тока, поступающим с выхода реверсивного интегрирующего усилителя 19 на второй вход блока 11 (клемма 38 фиг. 5), затем полученный сигнал Б виде выпрямленной синусоидальной кривой складывается с постоянной составляющей зоны воспроизведения тока (сигналы 30 и 31) и опорным синусоидальным сигналом 25 и поступает на входы компараторов 41 и 42. Таким образом, на входах компараторов 41 и 42 формируются напряжения, соответствующие верхней 30 и нижней 31 границам формируемого тока в соответствии с уравнениями:
г,„акс(0 /m+A/i(0 sin(co;f+9)+A/2, д„ин (t) /„-Д/1 (t) sin(wt + fn )-Д4,
где А/1 (О -составляющая погрешность тока, определяемая уравнением:
А/1 (О A/i при (2п+1)л А/, (/)-Д/1 при (2/С+1)а)/ + фл (2п -2)л,
/С 1, 2, 3, ..., п;
А/1 - составляющая зоны воспроиз- ведения тока, принятная в данном электроприводе постоянной величиной.
На других входах компараторов 41 и 42 (вход блока 5 управления импульсным усилителем мощности клемма 39 фиг. 5) с выхода датчиков 4 тока поступает сигнал 28, соответствующий току на выходе импульсного усилителя мощности 3. В результате сравнения сигналов 26 и 27 с сигналом 28 тока на выходе блока 5 управления импульсным усилителем мощности (клемма 40 фиг. 5)
формируются импульсы управления силовыми ключами импульсного усилителя 3 мощности. Одновременно на входы блока 20 сравнения поступают сигналы мгновенного значения тока 28 импульсного усилителя 3 мощности и сигнал требуемого значения
0 тока с выхода управляемого генератора 10, где выделяется разность этих сигналов в виде пилообразного напряжения 30 в общем случае переменной амплитуды, границы которой соответствуют текущему значению
ширины зоны формирования тока. Полученный в результате сравнения сигнал поступает на вход линейного усилителя 21 мощности, где он инвертируется, усиливается по мощности и в виде пилообразного напряжения 31 суммируется на входе двигателя 1
0 с выходным током импульсного усилителя 3 мощности, в результате чего на зажимах двигателя 1 формируется ток 32 синусоидальной формы.
В предлагаемом электроприводе компенсация колебаний тока импульсного усилителя 3 мощности производится линейным усилителем 21, который может стать источником значительных электрических потерь, величина которых в существенной степени определяется шириной зоны формирования
Q тока. Причем чем уже эта зона, тем меньше величина потерь в линейном усилителе и больше в импульсной за счет возрастания частоты коммутаций силовых вентилей. Поэтому для оптимизации потерь в целом, в преобразовательной части электропривода
5 необходимо предусмотреть оптимизирующее устройство, основной задачей которого является регулирование зоны воспроизведения тока, что и сделано в данном электроприводе Эта система работает следующим образом. Сигнал управления шириной синусной
0 составляющей зоны воспроизведения тока формируется на основании результата сравнения сигнала потребляемой электроприводом активной мощности, поступающей с выхода вычислителя 13 на второй вход блока 14 и сигнала мощности на валу электродвигателя 1, поступающего с выхода вычислителя 24 на вычитающий вход первого блока сравнения. Мощность, потребляемая электродвигателем, вычисляется как результат произведения сигнала, пропорционального
0 величине напряжения, снимаемого с датчика 23 напряжения, на активную составляющую тока потребляемого двигателем. Информация с тока поступает с выхода управляемого генератора 10 синусоидального сигнала на второй вход вычислителя 4.
5 Результат сравнения, по величине равный полным потерям преобразовательной части электропривода, поступает через интегратор 15 на первые входы второго блока сравнения
и устройства 17 выборки-хранения, которое с частотой следования импульсов 35 (фиг. 4) тактового генератора 18, на его втором входе подает на второй вход второго блока сравнения 16 сигнал, пропорциональный уровню суммарных потерь преобразовательной части в предшествующий период. Таким образом, на первом входе интегрирующего усилителя 19 (входе второго блока сравнения) формируется сигнал 36 (фиг. 4), приращений потерь в преобразовательной части электропривода. На второй вход усилителя 19 с выхода тактового генератора 18 поступает сигнал 35 (фиг. 4). Реверсивный интегрирующий усилитель 19 (схема фиг. 3) работает так, что при положительном сигнале 34 (мощность потерь в преобразовательной части возрастает) уменьшается амплитуда импульсной составляющей зоны формирования тока, что приводит к снижению величины потерь в линейном усилителе мощности И наоборот, при отрицательном сигнале на выходе второго блока сравнения 16 (снижение потерь) увеличивается зона формирования тока, тем самым увеличиваются потери линейного усилителя 21 мощности и снижаются потери импульсного усилителя мощности 3 за счет снижения частоты коммутации силовых вентилей. Оптимизирующее устройство электропривода постоянно стремится к формированию такой щирины зоны формирования тока, при которой величина потерь линейного 21, импульсного 3 усилителей мощности равны и в целом для текущего состояния электропривода минимальны.
Предлагаемый электропривод позволяет расщирить диапазон регулирования скорости вращения вала двигателя в области низких частот вращения за счет равномерности кругового поля асинхронной машины, путем формирования чисто синусоидального тока на зажимах двигателя.
Формула изобретения
Частотно-управляемыйасинхронный
электропривод, содержащий асинхронный двигатель с датчиком скорости на валу, подключенный к выходу импульсного усилителя мощности через датчики фазных токов, выходы которых подключены к блоку управления импульсным усилителем мощности, выход датчика скорости присоединен к первому входу регулятора скорости, второй
вход которого предназначен для подключения задающего сигнала, а выход - к входу формирователя заданных значений тока и скольжения, выход по скольжению которого соединен с первым входом сумматора, вторым входом соединенного с выходом датчика скорости, а выход подключен к первому входу управляемого генератора синусоидального сигнала, второй вход которого связан с выходом по заданному значению
тока формирователя заданных значений тока, а выход - с входом регулируемого блока формирования зоны воспроизведения тока, выход которого присоединен к входу блока управления импульсным усилителем мощности, вычислитель активной мощности,
входом подключенный к входу импульсного усилителя мощности, а выходом соединенный с суммирующим входом первого блока сравнения, присоединенного своим выходом к входу интегратора, подключенного своим
Q выходом к первым входам второго блока сравнения и блока выборки-хранения, второй вход которого подключен к выходу тактового генератора, а выход присоединен к второму входу второго блока сравнения, подключенного своим выходом к первому входу ревер5 сивного интегрирующего усилителя, второй вход которого присоединен к выходу тактового генератора, а выход присоединен к второму входу регулируемого блока формирования воспроизведения тока, отличающийся тем, что, с целью расширения диапазона
0 регулирования частоты вращения, в него дополнительно введены третий блок сравнения с тремя входами, линейный усилитель мощности, датчик тока, датчик напряжения и вычислитель активной мощности на входе двигателя, при этом к первому вычитающему
входу третьего блока сравнения подключены выходы датчиков фазных токов, к суммирующему входу третьего блока сравнения присоединен выход управляемого генератора синусоидального сигнала, а выход его под0 ключен к линейному усилителю мощности, который своим вторым входом присоединен к входу импульсного усилителя мощности, а выходом через датчик тока - к входу асинхронного двигателя, выход датчика тока связан с вторым вычитающим входом третье5 го блока сравнения, первый вход вычислителя активной мощности на входе двигателя подключен к датчику напряжения, второй вход - к выходу управляемого генератора синусоидального сигнала, а выход - к вы- ччтающему входу первого блока сравнения.
26
28
pu8.Z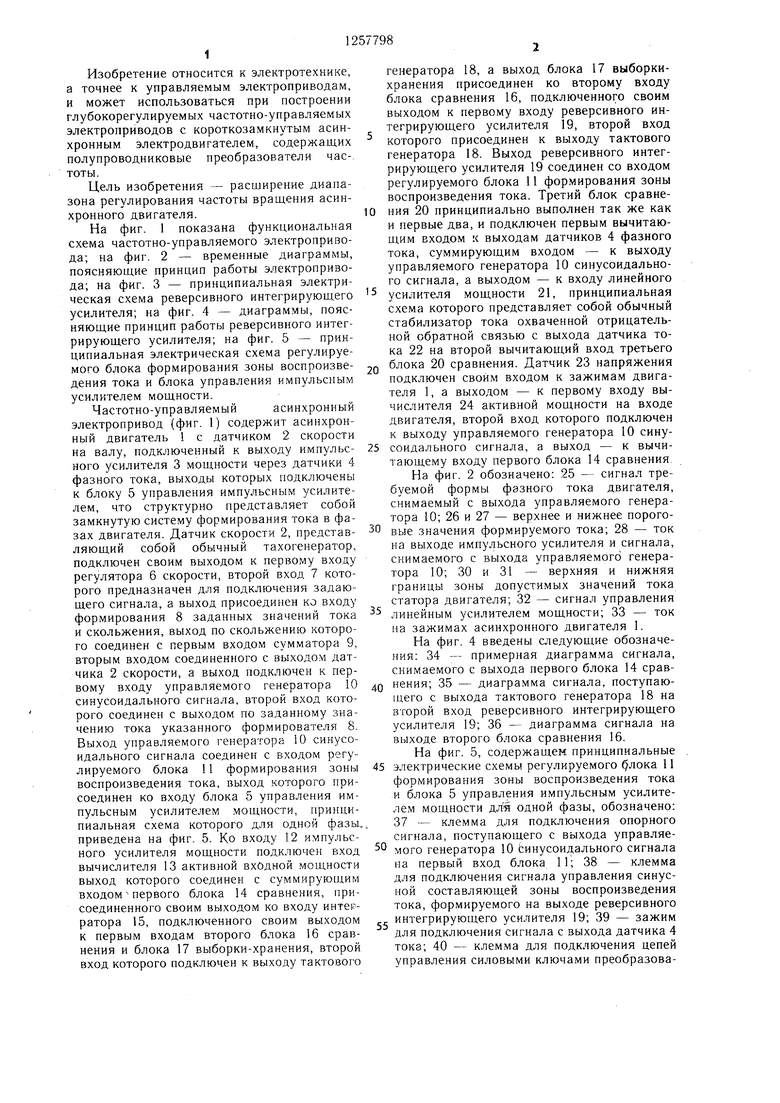
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| Способ формирования гармонических токов в фазах частотно-управляемого электродвигателя и устройство для его осуществления | 1986 |
|
SU1376210A1 |
| Способ формирования тока в фазе частотно-управляемого асинхронного электропривода и устройство для его реализации | 1986 |
|
SU1328922A1 |
| Способ формирования тока в фазе частотно- управляемого асинхронного двигателя | 1987 |
|
SU1495972A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2076448C1 |
| Электропривод | 1986 |
|
SU1372580A1 |
изобретение относится к электротех- ,нике и может быть использовано в системах управления для электроприводов (ЭП) с ко- роткозамкнутым асинхронным электродвигателем (АД). Цель изобретения - расширение диапазона регулирования частоты вращения АД. Устр-во содержит АД I с датчиком 2 скорости, импульсный усилитель 3 мощности, датчики 4 тока, блок 5 управления регулятор 6 скорости с входом 7 для задающего сигнала, формирователь 8 заданных значений тока и скольжения, сумматор 9, управляемый генератор 10 синусоидального сигнала, регулируемый блок 11 формирования зоны воспроизведения тока, вычислители I3 и 24 тактовой мощности, блоки сравнения 14 и 16, интегратор 15, блок выборки- хранения 17, тактовый генератор 18, интегрирующий усилитель 19, датчик тока 22, датчик напряжения 23. В устройство введены блок 22 сравнения и линейный усилитель 21 мощности. Реверсивный интегрирующий усилитель 19 работает так, что при возрастании мощности потерь в преобразовательной части уменьщаются потери в линейном усилителе мощности и наоборот. Таким образом, устр-во ЭП постоянно стремится к тому, что величина потерь линейного 21 и импульсного 3 усилителей мощности равны и в целом для текущего состояния ЭП минимальны, это позволяет формировать чисто синусоидальный ток на зажимах АД и обеспечивать равномерность кругового поля АД в области НИЗКИ.Х частот вращения. 5 ил. № (Л Isd сл со 00 cpus.t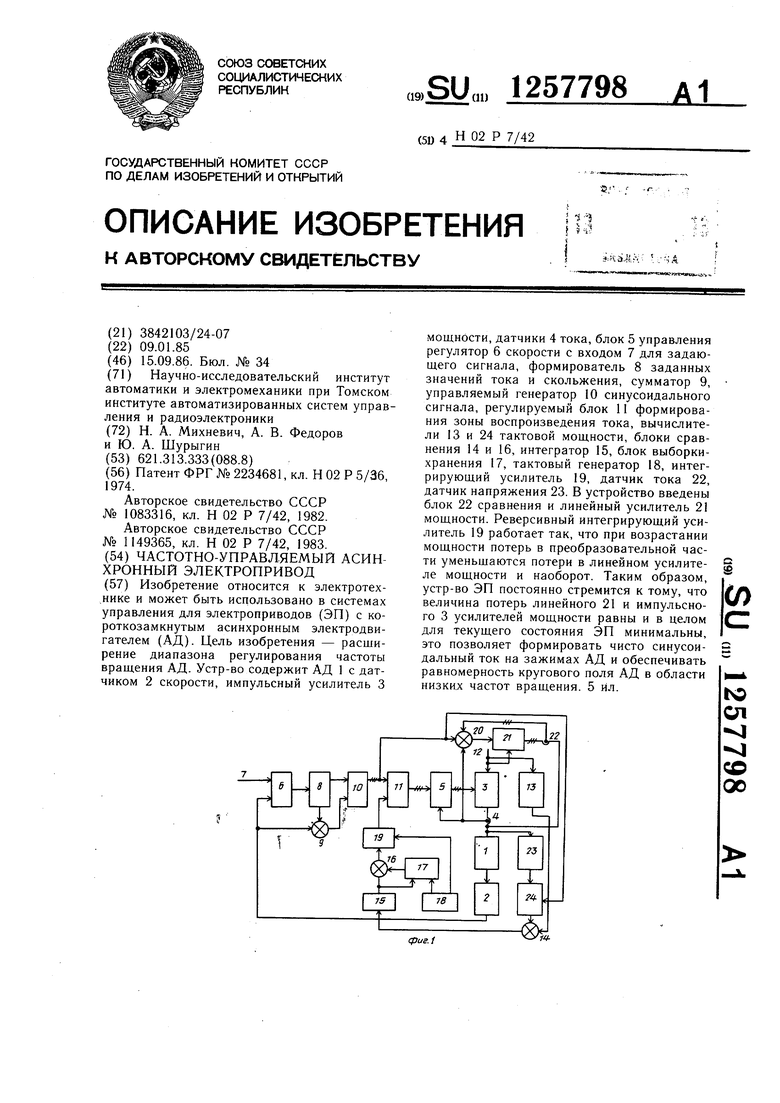
J5
cpua.
35,
cncpus.S
| ВОДОСЧЁТЧИК - МОКРОХОД | 2002 |
|
RU2234681C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стереопсевдоскоп | 1935 |
|
SU49365A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
