Изобретение относится к автоматике и вычислительной технике ипредназначено, для использования в системах программного управления станками для производства намоточных из делий,
Целью изобретения является упрощение и повышение быстродействия устройства.
Предлагаемое изобретение обеспечивает не только логическое управление циклом работы намоточного станка, но и упрощает конструкцию устройства, так как исчезает необходимость в наличии второго и третьего блоков памяти, четвертого счетчика, второго блока сравнения, шифратора, элементов И, ИЛИ, а также двух входов для подключения одних и тех же датчиков, если их сигналы используются для отработки цикла и формирования команд условных переходов.
Одновременно повышается быстродействие благодаря возможности одновременного контроля датчиков при формировании команд условного, перехода, при отработке конкретного шага программы осуществляется контроль только той запрещенной комбинации состояний датчиков станка, которая может привести к аварийной ситуации, при этом при возникновении запрограммированной запрещенной комбинации выполняется, переход к соответствующей прерывающей программе.
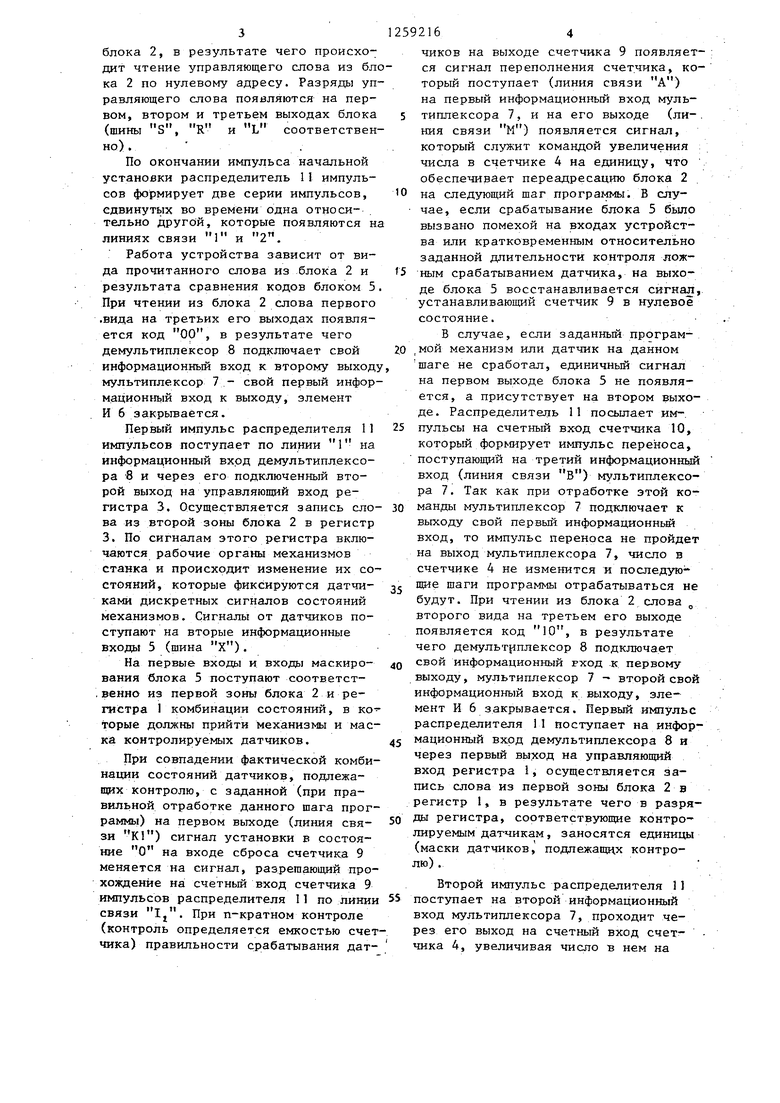
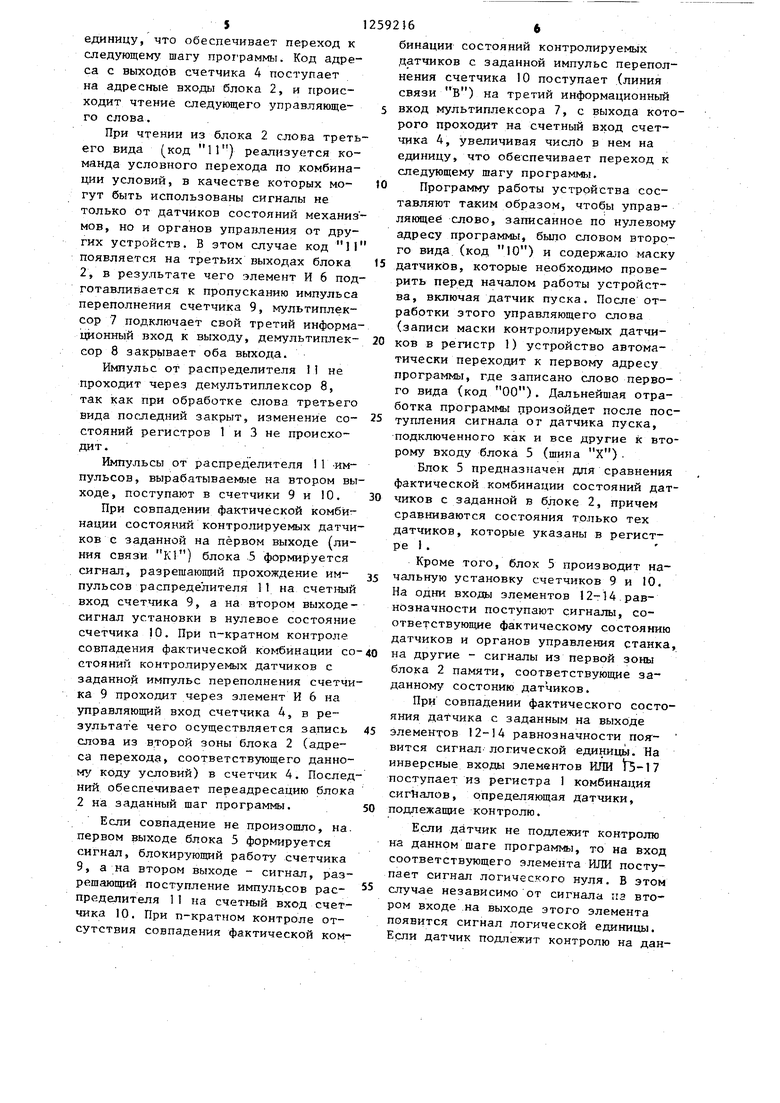
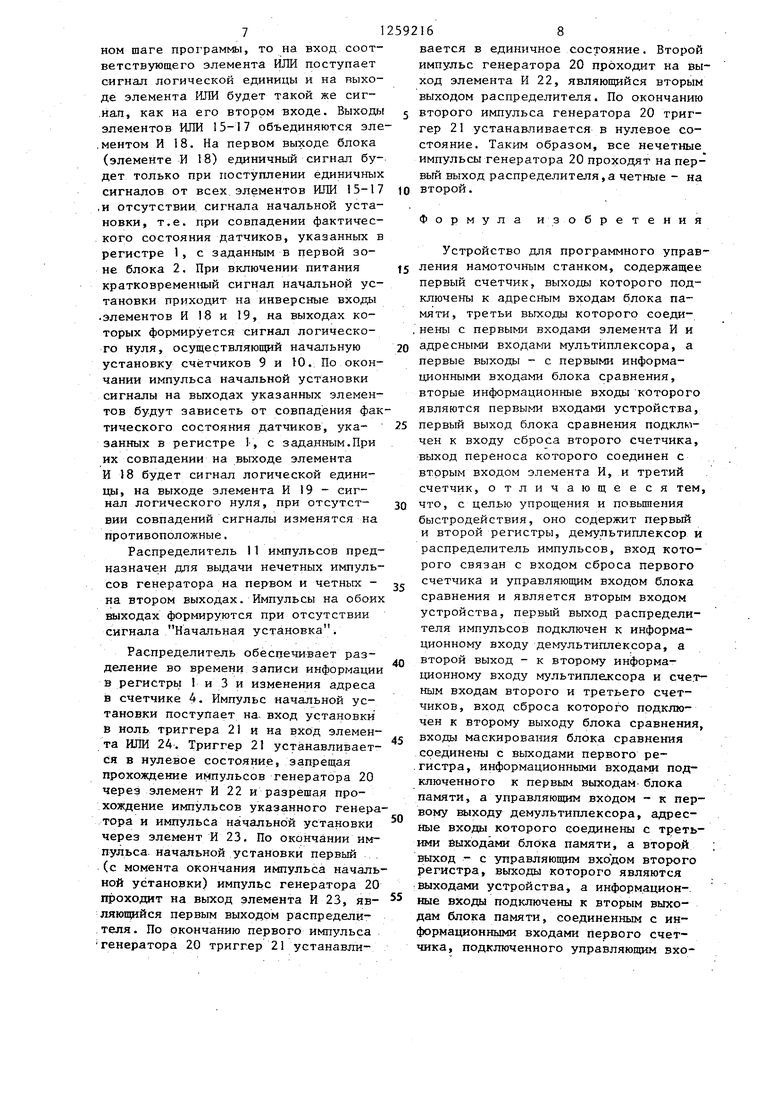
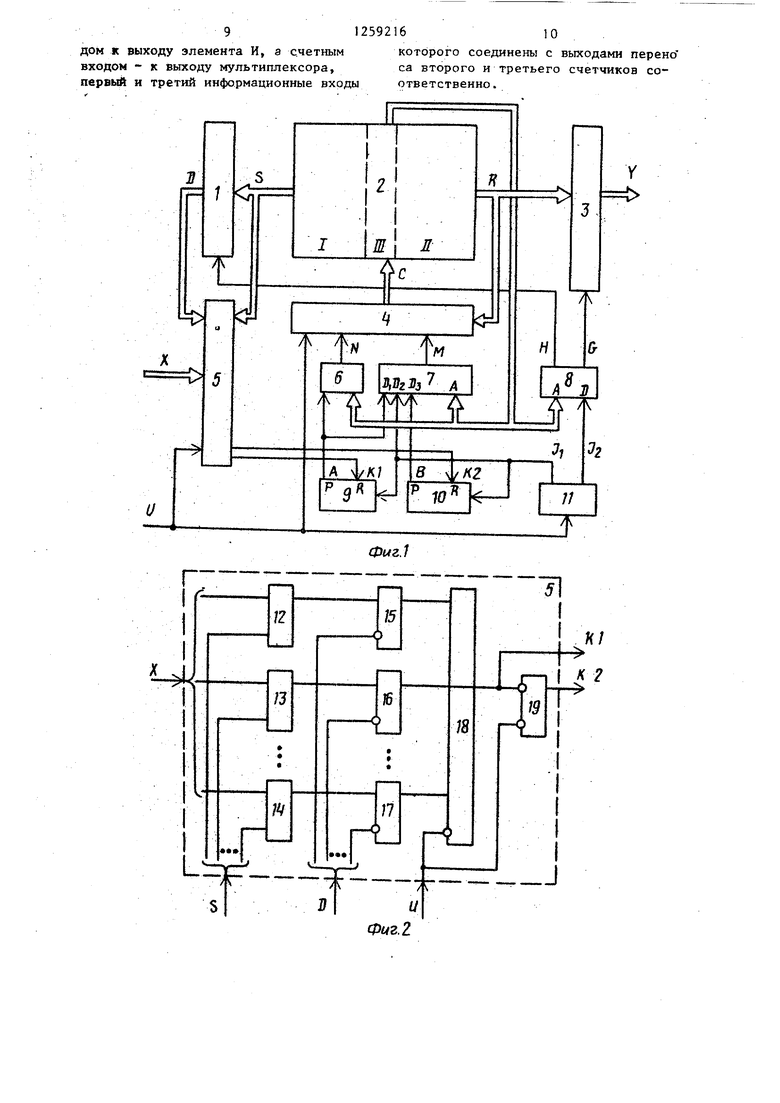
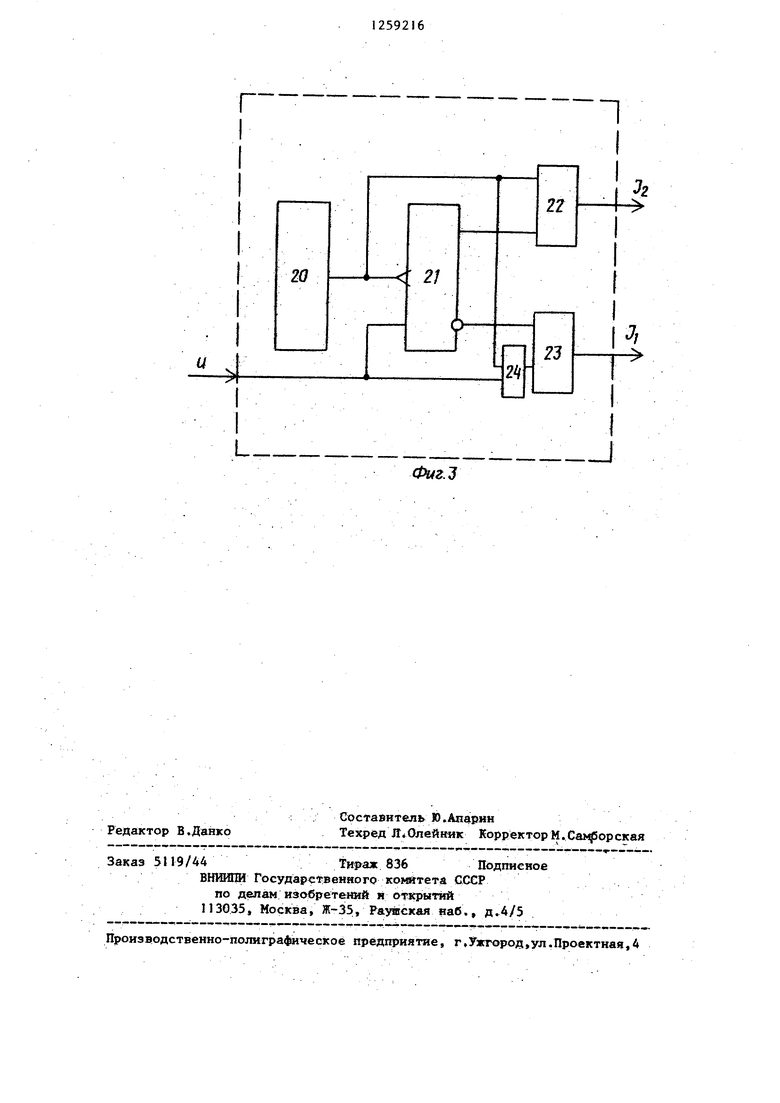
На фиг.-3 изображены функциональ Ше схемы устройства, блока сравнения и распределителя импульсов соот- ветственпо.
Устройство содержит первый регистр I, блок 2 памяти, второй регистр 3, первый счетчик 4, блок 5 сравнения, элемент И 6, мультиплексор 7, демультиплексор 8, второй 9 и третий 10 счетчики, распределитель II импульсов. Блок 5 сравнения содержит элементы 12-14 равнозначности, элементы ИЛИ 15-17, элементы И 18 и 19. Распределитель 1 импульсов содержит генератор 20 импульсов, триг- .гер 21, элементы И 22 и 23, элемент ИЛИ 24.
Устройство работает следующим образом. . .
-
тз ,- состояние указанных счетчиков и расВ блок 2, выполненный в виде прот-
пределителя.
Нулевой код адреса с выходов счетчика 4 поступает на адресные входы
раммируемь1Х постоянных запоми 1ающих устройств, записывается программа работы намоточного станка.,
-
5
10
15
20
25
592-162
Программа состоит из определенного числа управляющих слов, которые . имеют три зоны и бывают трех видов: команды на включение и отключение механизмов; команды, определяющие датчики, подлежащие контролю; команды условного перехода.
Вид команды определяется соответствующими признаками (00, 10, 11), занесенными в третью зону памяти. При чтении последней признак возникает на третьих выходах блока 2 памяти (щина L).
Разряды первых выходов блока 2 (шина S) образуют первую зону памяти, которая предназначена для хранения комбинации состояний, в которые должны прийти механизмы по сигналам второй зоны, если значение признака для хранения масок датчиков, подлежащих контролю, если значение признака для хранения кодов условий возможных переходов, если значение признака 11.
Разряды вторых выходов блока 2 (шина R) образуют II зону памяти, которая предназначена для хранения комбинаций сигналов управления механизмов на данном шаге, если значе- 30 ние признака 00, или кодов адреса условного перехода, если значение признака 11. .
Блок 2 имеет облую схему адресации для всех трех зон памяти, каждая 35 из которых содержит дешифратор адреса, матрицу запоминающих элементов и узел управления. Адресация и чтение содержимого ячеек всех трех зон выполняется параллельно в соответст- 40 ВИИ с кодом, поступающим по шине С с выходов счетчика 4. .
Отрабэтка программы намоточного оборудования осуществляется путем поочередного считывания из блока 2 уп- 45 равляющих слов.
При вклк)чении питания в устройство по второму входу (линия связи V) поступает кратковременный импульс на- чалвной установки, которьй воздейст- 50 вует на входы сброса счетчиков А, 9 . и 10 (на два послед1шх через блок 5 сравнения) и вход распределителя 11 импуль сов.
Происходит установка в нулевое
блока 2, в результате чего происходит чтение управляющего слова из блока 2 по нулевому адресу. Разряды управляющего слова пояйляются на первом, втором и третьем выходах блока (шины S, R и L соответственно) .
По окончании импульса начальной установки распределитель I1 импульсов формирует две серии импульсов, сдвинутых во времени одна относительно другой, которые появляются на линиях связи 1 и 2.
Работа устройства зависит от вида прочитанного слова из блока 2 и результата сравнения кодов блоком 5 При чтении из блока 2 слова первого .вида на третьих его выходах появляется код 00, в результате чего демультиплексор 8 подключает свой информационный вход к второму выходу мультиплексор 7 - свой первый информационный вход к выходу, элемент И 6 закрывается.
Первый импульс распределителя 11 импульсов поступает по линии на информацион1й Й вход демультиплексо- ра -8 и через его подключенный второй выход на управляющий вход регистра 3, Осуществляется запись слова из второй зоны блока 2 в регистр 3. По сигналам этого регистра включаются рабочие органы механизмов станка и происходит изменение их состояний, которые фиксируются датчиками дискретных сигналов состояний механизмов. Сигналы от датчиков поступают на вторые информационные входы 5 (шина Х).
На первые входы и входы маскирования блока 5 поступают соответст- ,венно из первой зоны блока 2 и регистра 1 комбинации состояний, в ко торые должны прийти механиз1Ф1 и маска контролируемых датчиков.
При совпадении фактической комбинации состояний датчиков, подлежащих контролю, с заданной (при правильной отработке данного шага программы) на первом выходе (линия связи К1) сигнал установки в состояние О на входе сброса счетчика 9 меняется на сигнал, разрешающий прохождение на счетный вход счетчика 9 импульсов распределителя I1 по линии связи Ij. При п-кратном контроле (контроль определяется емкостью счетчика) правильности срабатывания дат2592164
чиков на выходе счетчика 9 появляется сигнал переполнения счетчика, который поступает (линия связи А) на первый информационньш вход муль- 5 типлексора 7, и на его выходе (ли-, ния связи М) появляется сигнал, который служит командой увеличения числа в счетчике 4 на единицу, что обеспечивает переадресацию блока 2
10 на следующий шаг программы. В слу- чае, если срабатывание блока 5 было вызвано помехой на входах устройства или кратковременным относительно заданной длительности контроля лож 5 ным срабатыванием датчика, на выходе блока 5 восстанавливается сигнал, устанавливающий счетчик 9 в нулевое
состояние.
В случае, если заданньй програмУ) ,мой механизм или датчик на данном шаге не сработал, единичный сигнал на первом выходе блока 5 не появляется, а присутствует на втором выходе. Распределитель 11 посьшает им-.
5 пульсы на счетный вход счетчика 10, который формирует импульс переноса, поступающий на третий информационньй вход (линия связи в) мультиплексора 7. Так как при отработке этой ко0 манды мультиплексор 7 подключает к выходу свой первьой информационный вход, то импульс переноса на пройдет на выход мультиплексора 7, число в счетчике 4 не изменится и последую-
г 1Ще шаги программы отрабатываться не будут. При чтении из блока 2 слова второго вида на третьем его выходе появляется код 10, в результате чего дeмyльт5 плeкcop 8 подключает
0 свой информационный рход .к первому выходу, мультиплексор 7 - второй свой информационный вход к выходу, эле- мент И 6 закрывается. Первый импульс распределителя 11 поступает на инфор5 мационный вход демультиплексора 8 и через первый выход на управляющий
вход регистра 1, осуществляется запись слова из первой зоны блока 2 в регистр 1, в результате чего в разря- Ды регистра, соответствующие контролируемым датчикам, заносятся единицы (маски датчиков, подлежащих контролю) .
Второй импульс распределителя 11 поступает на второй информационный вход мультиплексора 7, проходит через его выход на счетный вход счетчика 4, увеличивая число в нем на
единицу, что обеспечивает переход к следующему шагу прог раммы. Код адреса с выходов счетчика 4 поступает на адресные входы блока 2, и происходит чтение следующего управляющего слова.
При чтении из блока 2 слова третьего вида (код 11) реализуется команда условного перехода по комбинации условий, в качестве которых могут быть использованы сигналы не только от датчиков состояний механизмов, но и органов управления от других устройств. В этом случае код 11
появляется на третьих выходах блока 2, в результате чего элемент И 6 подготавливается к пропусканию импульса переполнения счетчика 9, мультиплексор 7 подключает свой третий информационный вход к выходу, демультиплек- сор 8 закрывает оба выхода.
Импульс от распределителя 11 не проходит через демультиплексор 8, так как при обработке слова третьего вида последний закрыт, изменение состояний регистров 1 и 3 не происходит.
Импульсы от распределителя Г-импульсов, вырабатываемые на втором выходе, поступают в счетчики 9 и 10.
При совпадении фактической комбинации состояний контролируемых датчиков с заданной на первом выходе (линия связи fCl) блока ,5 формируется сигнал, разрешающий прохождение им- пульсов распределителя П на счетный вход счет шка 9, а на втором выходе- сигнал установки в нулевое состояние счетчика 10. При п-кратном контроле совпадения фактической комбинации со стояний контролируемых датчиков с заданной импульс переполнения счетчика 9 проходит через элемент И 6 на управляющий вход счетчика А, в результате чего осуществляется запись слова из второй зоны блока 2 (адреса перехода, соответствующего данному коду условий) в счетчик 4. Последний обеспечивает переадресацию блока 2 на заданный шаг программы.
Если совпадение не произошло, на. первом выходе блока 5 формируется сигнал, блокирующий работу счетчика 9, а на втором выходе - сигнал, разрешающий поступление импульсов распределителя II на счетный вход счетчика 10. При п-кратном контроле отсутствия совпадения фактической ком
бинации состояний контролируемых датчиков с заданной импульс переполнения счетчика 10 поступает (линия связи В) на третий информационный вход мультиплексора 7, с выхода которого npoxojyiT на счетный вход счетчика 4, увеличивая число в нем на единицу, что обеспечивает переход к следующему шагу програм..
Программу работы устройства составляют таким образом, чтобы управ- лякйцеё слово, записанное по нулевому адресу програм2Ф, бьшо словом второго вида (код 10) и содержало маску датчиков, которые необходимо проверить перед началом работы устройства, включая датчик пуска. После отработки этого управляющего слова (записи маски контролируемых датчиков в регистр 1) устройство автоматически переходит к первому адресу программы, где записано слово первого вида (код 00). Дальнейшая отработка программы произойдет после поступления сигнала от датчика пуска, подключенного как и все другие к второму входу блока 5 (шина Х).
Блок 5 предназначен дпя сравнения фактической комбинации состояний датчиков с заданной в блоке 2, причем сравниваются состояния только тех датчиков, которые указаны в регистре 1 .
Кроме того, блок 5 производит начальную установку счетчиков 9 и 10. На одни входы элементов 12-14.равнозначности поступают сигналы, соответствующие фактическому состоянию датчиков и органов управления станка, на другие - сигналы из первой зоны блока 2 памяти, соответствующие заданному состонию датчиков.
При совпадении фактического состояния датчика с заданным на выходе элементов 12-14 равнозначности появится сигнал-логической единиць. На инверсные входы элементов ИЛИ 5-17 поступает из регистра 1 комбинация сиг11алов, определяющая датчики, подлежащие контролю.
Если датчик не подлежит контролю на данном шаге программы, то на вход соответствующего элемента ИЛИ поступает сигнал логического нуля. В этом случае независимо от сигнала из втором входе на выходе этого элемента появится сигнал логической единицы. Если датчик подлежит контролю на дан
71
ном шаге программы, то на вход соответствующего элемента ИЛИ поступает сигнал логической единицы и на выходе элемента 1-ШИ будет такой же сиг- .нап, как на его втором входе. Выходы элементов ИЛИ 15-17 объединяются эле .ментом И 18. На первом выходе блока (элементе И 18) единичный сигнал будет только при поступлении единичных сигналов от всех элементов ИЛИ 15-17 ,и отсутствии сигнала начальной установки, т.е. при совпадении фактического состояния датчиков, указанных в регистре 1, с заданным в первой зоне блока 2. При включении питания кратковременный сигнал начальной установки приходит на инверсные входы элементов И 18 и 19, на выходах которых формируется сигнал логического нуля, осуществляющий начальную установку счётчиков 9 и 10. По окончании импульса начальной установки сигналы на выходах указанных элементов будут зависеть от совпадения фактического состояния датчиков, ука- занных в регистре 1-, с заданным.При их совпадении на выходе элемента И 18 будет сигнал логической едини- , на выходе элемента И 19 - сигнал логического нуля, при отсутст- ВИИ совпадений сигналы изменятся на противоположные.
Распределитель 11 импульсов предназначен дпя выдачи нечетных импульсов генератора на первом и четньтх - на втором выходах. Импульсы на обоих выходах формируются при отсутствии сигнала Начальная установка.
Распределитель обеспечивает раз
деление во времени записи информации в регистры 1 и 3 и изменения адреса в счетчике 4. Импульс начальной установки поступает на. вход установки в ноль триггера 21 и на вход элемента ИЛИ 24. Триггер 21 устанавливает- ся в нулевое состояние, запрещая прохождение импульсов генератора 20 через элемент И 22 и разрешая прохождение импульсов указанного генератора и импульса начальной установки через элемент И 23. По окончании импульса, начальной установки первый (с момента окончания импульса начальной установки) импульс генератора 20 проходит на выход элемента И 23, яв- ляющийся первым выходом распределителя . По окончанию первого импульса генератора 20 триггер 21 устанавли
j O 5 0 5 о
5
0
168
вается в единичное состояние. Второй импульс генератора 20 проходит на выход элемента И 22, являющийся вторым выходом распределителя. По окончанию второго импульса генератора 20 триггер 21 устанавливается в нулевое состояние. Таким образом, все нечетные импульсы генератора 20 проходят на первый выход распределителя,а четные - на второй.
Формула изобретения
Устройство для программного управления намоточным станком, содержащее первый счетчик, выходы которого подключены к адресным входам блока памяти, третьи выходы которого соединены с первыми входами элемента И и адресными входаьга мультиплексора, а первые выходы - с первыми информационными входами блока сравнения, вторые информационные входы которого являются первыми входами устройства, первый выход блока сравнения подклм- чен к входу сброса второго счетчика, выход переноса которого соединен с вторым входом элемента И, и третий счетчик, отличающееся тем, что, с целью упрощения и повышения быстродействия, оно содержит первый и второй регистры, демультиплексор и распределитель импульсов, вход которого связан с входом сброса первого счетчика и управляющим входом блока сравнения и является вторым входом устройства, первый выход распределителя импульсов подключен к информационному входу демультиплексора, а второй выход - к второму информационному входу мультиплел сора и сче.т- ным входам второго и третьего счетчиков, вход сброса которого подключен к второму выходу блока сравнения, входы маскирования блока сравнения соединены с выходами первого ре- . гистра, информационными входами подключенного к первым выходам- блока памяти, а управляющим входом - к первому выходу демультиплексора, адресные входы которого соединены с третьими выходами блока памяти, а второй выход - с управляющим входом второго регистра, выходы которого являются выходами устройства, а информацион-. «ые входы подключены к вторым выходам блока памяти, соединенным с информационными входами первого счетчика, подключенного управляющим вхо9125921610
дом к выходу элемента И, а счетным которого соединены с выходами перено входом - к выходу мультиплексора, са второго и третьего счетчиков со- первый и третий информационные входы ответственно.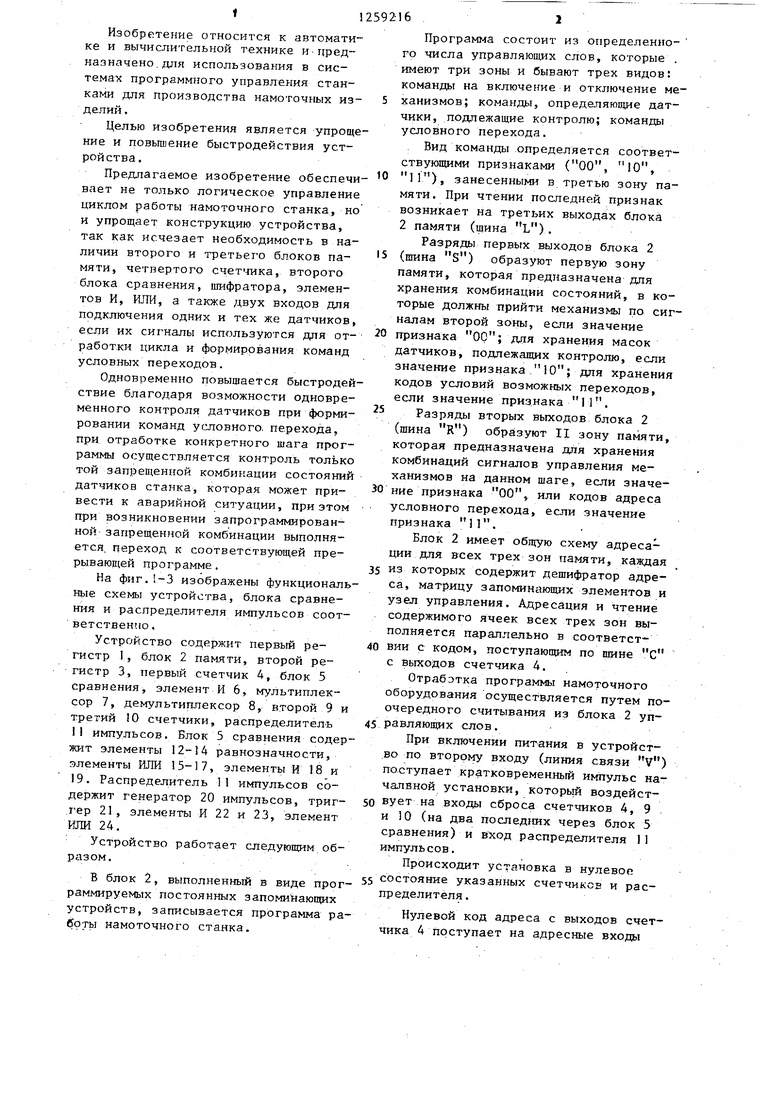
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления технологическим оборудованием | 1988 |
|
SU1638707A1 |
| Устройство для программного управления технологическим оборудованием | 1987 |
|
SU1423982A1 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| ОТКАЗОУСТОЙЧИВЫЙ МУЛЬТИМИКРОКОНТРОЛЛЕР | 1999 |
|
RU2156492C1 |
| Распределенная система для программного управления технологическими процессами | 1990 |
|
SU1797096A1 |
| Распределенная система для программного управления технологическими процессами | 1988 |
|
SU1605212A1 |
| Устройство для обмена информацией в мультипроцессорной вычислительной системе | 1988 |
|
SU1571594A1 |
| ДИСКРЕТНАЯ МИКРОКОНТРОЛЛЕРНАЯ СЕТЬ | 1997 |
|
RU2110827C1 |
| РАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1997 |
|
RU2122229C1 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 2000 |
|
RU2198417C2 |
Изобретение относится к области автоматики и вычислительной техники и предназначено для использования в системах программного управления станками для производства намоточных изделий. Решается задача упрощения устройства и повьшения его быстродействия путем одновременного контроля датчиков при обработке команд условных переходов или контроля только/ той комбинации датчиков,которая может привести к аварии при отработке команды. Программа управления из блока памяти считывается по адресам первого счетчика. Для команд включения и отключения механизмов сигнал от распределителя импульсов проходит через демультиплексор и записывает команды управления во второй регистр. При совпадении сигналов датчиков с заданными блок сравнения разрешает второму счетчику подсчет иштульсов распределителя и формирование импульса переполнения, который инкременти- рует первый счетчик, изменяя адрес .блока памяти. Для команд контроля датчиков импульс с первого ныхода распределителя через демультиплексор подается на управляющий вход первого регистра и записывает в него код маски датчиков, подлежащих кон-« тролю, а импульс со второго выхода распределителя через мультиплексор инкрементирует первый счетчик. Для команд условного перехода при совпадении фактической комбинации датчиков с заданной импульс переполнения второго счетчика проходит через элемент И и записывает в первый счет- Чик код адреса условного перехода. 3 ил. (Л С
Т
J
Фиг. 2
Г
Редактор В.Данко
Составитель Ю.Апарин
Техред Л Олейняк КорректорM.eaw(j5opекая
Заказ 5119/44Т фаж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений н открытий 113035, Москва, Ж-35,Рау1Вскаянаб., д.4/5
Производствеино-полиграфическоё прёдприя-пае, г Ужгород,ул.Проектная,4
п
Фиг.
| Патент Великобритании № 1459177, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1981 |
|
SU1004975A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
