1
Изобретение относится к экспериментальной ядерной физике и может быть применено в электронных и оптических схемах. детекторов заряженных частиц.
Цель изобретения - расширение функциональных возможностей путем регистрации координаты центра кластера длиной t, при t 1, 2...и т.д
На чертеже приведена структурная схема предлагаемого устройства для случая, когда число датчиков в одно
t - t блохе составляет п С - -j
. N(N-.li.r..t., ,2, где
N - число смесителей 1-й группы; t - длина кластера; С - число сочетаний из N по 2 при фиксированных N 6 и t 3. Связи показаны только для первого блока.
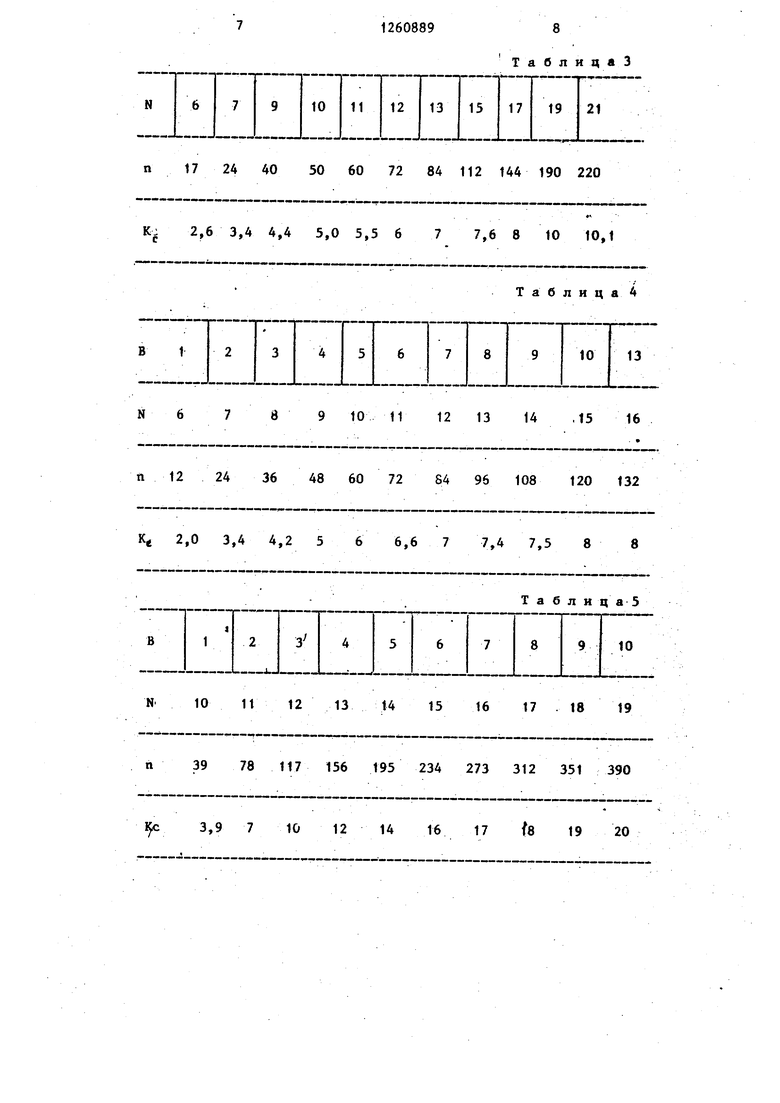
Устройство содержит выходы датчиков 1-12, соответствующие им усилители 13 и формирователи 14, первую группу смесителей 15-20, мнрго- входовый смеситель 21 на п 6 входов, модуль 22 вычисления координаты центра кластера, вьшолненный в виде постоянного эапоминакнцего устройства (ПЗУ), вторую группу смесителей 23-25, входы 26 первой группы смесителей, подключенные ,к выходам формирователей других блоков
(датчиков, входы 27 второй группы смесителей, подключенные соответственно к выходам всех формирователей 2-го, 3-го, N-ro блоков, выход 28 сигнала синхронизацч и (БЫСТРОЕ ИЛИ) выходы 29 устройства. Конструктивна взаимосвязь в устройстве вьшолнена
следующим образом. Выходы датчиков 1-12 подключены к входам соответствующих им усилителей. В качестве датчиков могут служить нити, используемые в координатной пропорциональной камере, дрейфовые трубки, сцин- тиллятopЫj полупроводниковые детекторы. Сигналы, поступающие от таких датчиков, как правило, усиливаются, С помощью формирователей эти сигнал в зависимости от условий эксперимента формируются по длительности, ам.плитуде, полярности. Вькоды формирователей 14 первого блока по определенному правилу соединены с входами смесителей 15-20. Это правило исходит из структуры кодирующей матрицы HI при условии, что в ней
12608892
.вычеркнуты последние 3 столбца, что позволяет однозначно регистрировать тройной кластер.
5
0
5
0
Матрица HI имеет регулярную структуру и характеризуется следующими параметрами: N 6 - число строк; |П С число столбцов (число сочетаний 2 из 6) 15. Все столбцы матрицы HI, начиная с первого, можно разделить на группы М N - 1 5 групп. Первую группу А образуют первые 5 столбцов, вторую группу В - следующие 4 столбца (столбцы 6-9) и т.д., и последний 15 столбец образует 5-ю группу. Позиции единиц в строках матрицы Н1 задают правило соединения выходов формирователей с входами смесителей. Число с толбцов в матрице Н1 соответствует числу датчи-- ков в блоке, а число строк - числу смесителей. Количество входов каждого из атих смесителей определяется числом единиц в соответствующей строке кодирующей матрицы. Позиция единиц в столбце кодирующей матрицы определяет на какие смесители сигнал разветвляется от датчика, соответствующего данному столбцу. Важнейщим параметром матрицы HI является коэффициент сжатия К n/N. Для данного примера К 15/6 2,5. В общем случае К силь.но растет с возрастанием п.
На входы смесителя 15, которьй соответствует первой строке матрицы HI, сигналы через усилители и формирователи поступают от 1-го, 6-го и 10-го датчике, так как единицы в этой строке расположены в 1-м, 6-м и 10-м столбцах. Аналогично выполнены связи в остальных смесителях. Кроме того, входы 26 смесителей 15-20 соединены с выходами форми- рова -елей других блоков датчиков по такому же .правилу. Так кодирующая матрица Н2 для второго блока будет такой же как и для 1-го, за исключением того, что в ней добавлена строка, состоящая из единиц.
Следующий блок содержит две строки, содержащие все единицы и т.д. Коэффициент сжатия растет до тех пор,пока число дополнительных строк не сравнивается с числом столбцов в исходной матрице Н2. Из структуры
матрицы Н2 видно, что из второго блока сигналы на вход смесителя 15 поступают от 13-го, 18-го и 22-го датчиков, если счет вести, начиная с первого блока и т.д. Входы второй группы смесителей соответственно соединены с выходами всех формирователей блоков, начиная с .второго, что следует из структуры матрицы Н2 Входы смесителя 23 соединены с выхо- дами всех формирователей соответству ющих второму блоку датчиков и т.д. Выходы смесителей первой и второй групп подключены к входам модуля вычисления координаты центра клас- тера.
Устройство работает следующим образом.
Допустим, что однов|5еменно сигналы поступают от датчиков 1-3 первого блока. Тогда на выходах смесителей 15-20 формируется код 111001, соответствующий булевой сумме первых трех столбцов матрицы HI. Этот код поступает на адресные входы модуля вычисления координаты центра кластера, которьм представляет собой постоянное запоминающее устройство, запрограммированное на работу в режиме преобразователя кодов. Так коду на входах ПЗУ 111001 на вькодах соответствует код 0000100 2 Смладший разряд слева). Если же срабатывают датчики 2-4, то в ПЗУ вьтолняется преобразование 0111010- 000011 - 3, что соответствует координате центра кластера. Если же сигналы поступают от датчиков 1-3 второго блока, то на выходах смесителей первой и второй групп формируется код 1110011, а i. на выходе ПЗУ - код 001110 14, так как центр этого кластера совпадает с датчиком.
Таким образом., за счет сжатия данных, поступающих от датчиков многоканального детектора, можно использовать современные быстродействующие ПЗУ.
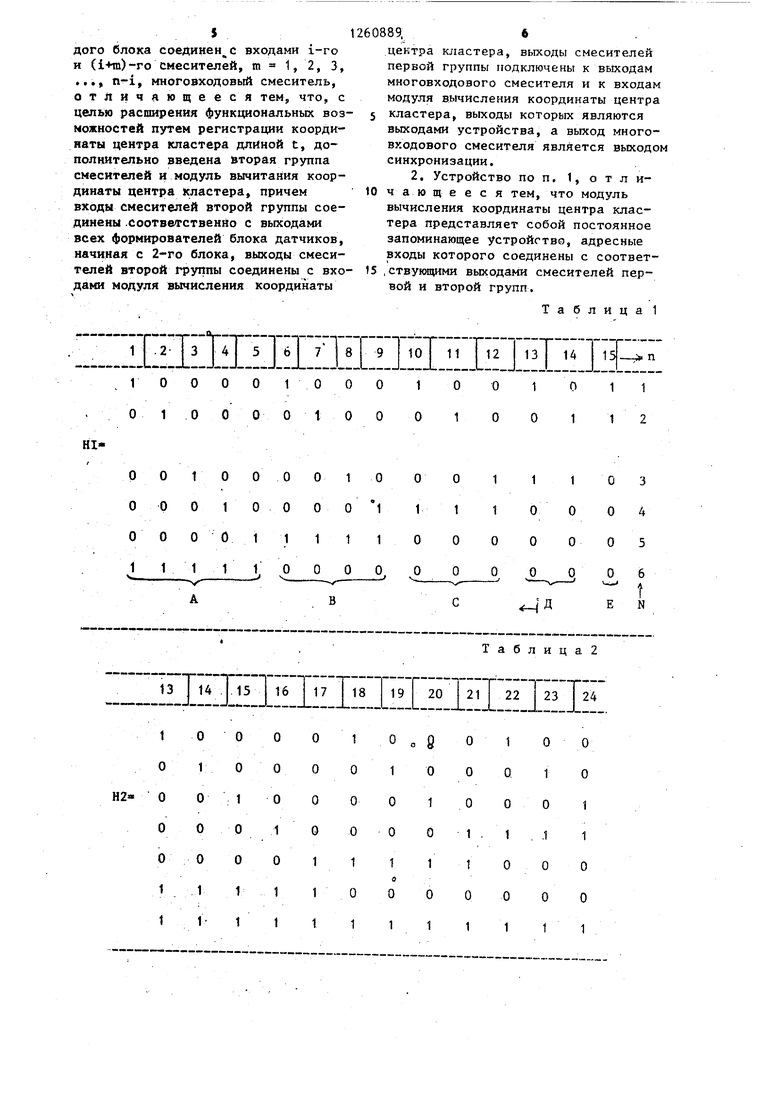
Кроме того, в ПЗУ расшифровывается также код номера блока, который поступает с выходов смесителей 23- 25. В таблице 3 приведены данные, характеризующие рост коэффициента сжатия Kj при различных значениях величин п и N в прототипе. .
В табл. 4 приведены значения К,. в зависимости от величин п, N ц
Ч11сла используемых блоков В/В п при регистрации кластера длиной t 3.
Видно, что величина К,. 8 достгается при числе датчиков в прото- типе 144, а в предлагаемом устройсве при п 120.
Если число датчиков в координатной камере велико, то в предлагает мом устройстве необходимо кодирова блоками, что видно из табл. 5. Причем здесь t А, N N плюс число блоков.
При этом в табл. 5 учтен тот факт, что кодирование выполняется укороченными матрицами, так как
Ш Q
при N 10, п СД -™ 45.
Для регистрации кластера длиной 4, необходимо в исходной матрице вычернуть последние 6 столбцов.
Таким образом, по сравнению с прототипом предлагаемое устройство имеет более широкие функциональные возможности за счет эффективной регистрации кластера, который может возникнуть в любой части детектора.
В общем случае связь между параметрами п, N, t и В определяется следующим выражением
N(N - 1) - tf. + t)B
2() N(N - 1) 2
Так при N 15, t 6, В 10, К. 36, a общее число«датчиков, которое можно закодировать, при этом равно
fNCN - 1) - t + tiB ...
п CJ
900.
дый блок содержит
Форм ул а и 3 о б ре тения
1. Устройство для регистрации координаты центра кластера, содержащее п блоков датчиков, причем кажп(п - 1) - t t .датчиков, где t - длина кластера, разделенных на n-t групп, в i-й группе содержится n-i датчиков, где i 1, 2, 3..., n-t, усилители, формирователи, выходы датчиков соединены с входами усилителей, выходы которых подключены к входам соответствующих им формирователей, причем га-й формирователь в i-й группе каж-
5 1260889.6
дого блока соединение входами i-roцентра кластера, выходы смесителей
и (i-Hn)-го смесителей, m 1,2, 3,первой группы подключены к вьтходам
,,. n-i, ffloгoвxoдoвый смеситель,многовходового смесителя и к входам
отличающееся тем, что, смодуля вычисления координаты центра
целью расширения функциональньк воз-5 кластера, выходы которых являются
можностей путем регистрации коорди-выходами устройства, а вьгход многонаты центра кластера длиной t, до-входового смесителя является выходом
полнительно введена Вторая группасинхронизации.
смесителей и модуль вычитания коор-2. Устройство по п, 1, о т л идинаты центра кластера, причем10 ч а ю щ е е с я тем, что модуль
входы смеситепей второй группы сое-вычисления координаты центра класдинены .соответственно с выходамитера представляет собой постоянное
всех формирователей блока датчиков,запоминающее устройство, адресные
начиная с 2-го блока, выходы смеси-входы которого соединены с соответтелей второй группы соединены с вхо-15 .ствующими выходами смесителей пердами модуля вычисления координатывой и второй групп.
Таблица1
n 17 24 40 50 60 72 84 112 144 190 220
L: 2,6 3,4 4,4 5,0 5,5 6 7 7,6 В 10 10,1
В 1
4
N 6789 10 11 12 13 14 ,15 16
n 12 24 36 48 60 72 84 96 108 120 132
К 2,0 3,4 4,2 5 6 6,6 7 7,4 7,5 88
N 10 11 12 13 14 15 16 17 18 19
n 39 78 117 156 195 234 273 312 351 390
1 3,9 7 10 12 14 16 17 {8 19 20
ТаблицаЗ
15
17
19
21
Табляца4
10
13
Т а б л и ц а 5
8
10
12-)в
Ч1К
HlhD HIM HJ-Cf
гу
z
ЧШИ
4 -CHIHIP
J-CH
г-СМ
-СН
Редактор И.Касарда
Составитель В.Рогов Техред Л.Сердюкова
Заказ 5227/47Тираж 728Подписное
ВНИИПИ Государственного ксЯиитета СССР
по делам изобретений и открытий 113035,, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Е.Сирохман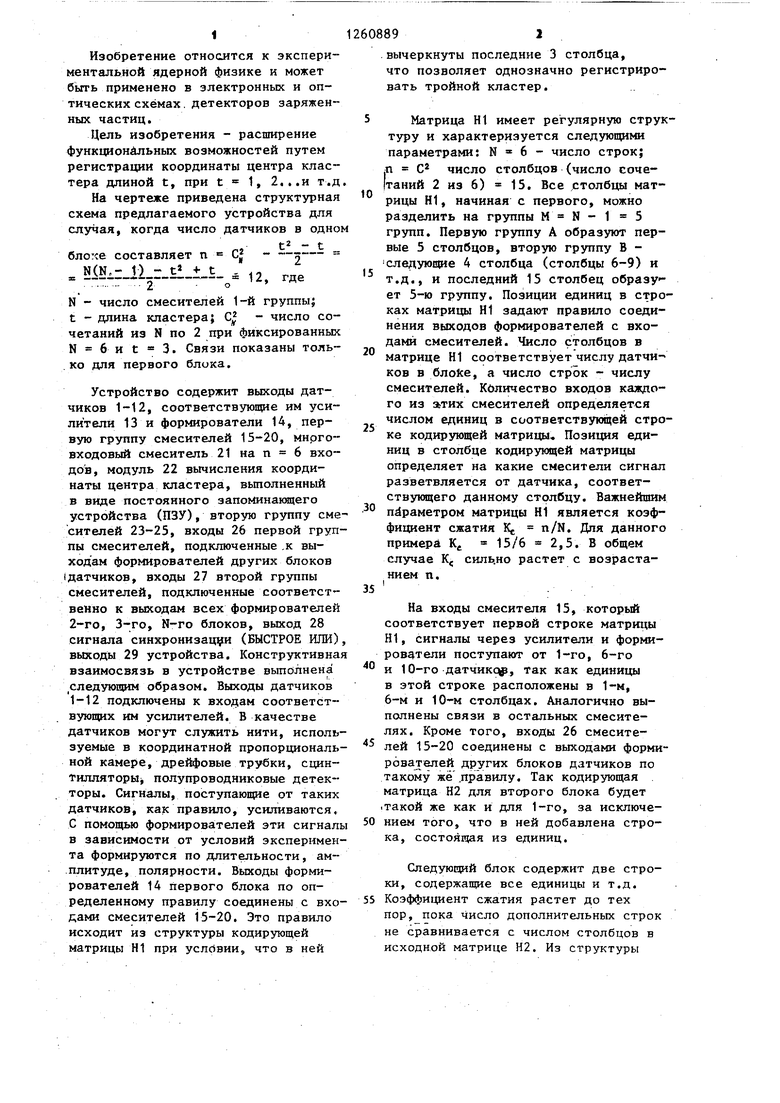

Изобретение относится к экспериментальной ядерной физике и может быть использовано для регистрации координаты центра кластера. Целью изобретения является расвирепие функциональных возможностей. Устройство содержит блоки датчиков, усилители, формирователи и смесители, В устройство введены дополнительная группа смесителей и модуль вычисления координаты центра кластера. До- пол гительное оборудование позволяет регистрировать центр кластера длиной более 2. 1 з.п. ф-лы, 1 ил,, 5 табл.
| P.Gfassel, Н.Roster А position- sensitive chamber | |||
| Nuclear Instruments and Methods, 1977, v | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| S.Kitamoto A new - read - out method for muftiwire prorortionat counters | |||
| Nucfear Instruments and Methods, 1982, v | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ПРОХОДЯЩЕГО ПАРА В ТРУБАХ И НАГРУЗОК ПАРОВЫХ КОТЛОВ | 1921 |
|
SU595A1 |
