Изобретение относится к тренажерам для профессиональной подготовки машинистов одноковшовых экскаваторов с рабочим оборудованием типа «прямая лопата.
Цель изобретения - расширение дидактических возможностей тренажера с повышением эффективности обучения машиниста экскаватора управлению рабочими режимами.
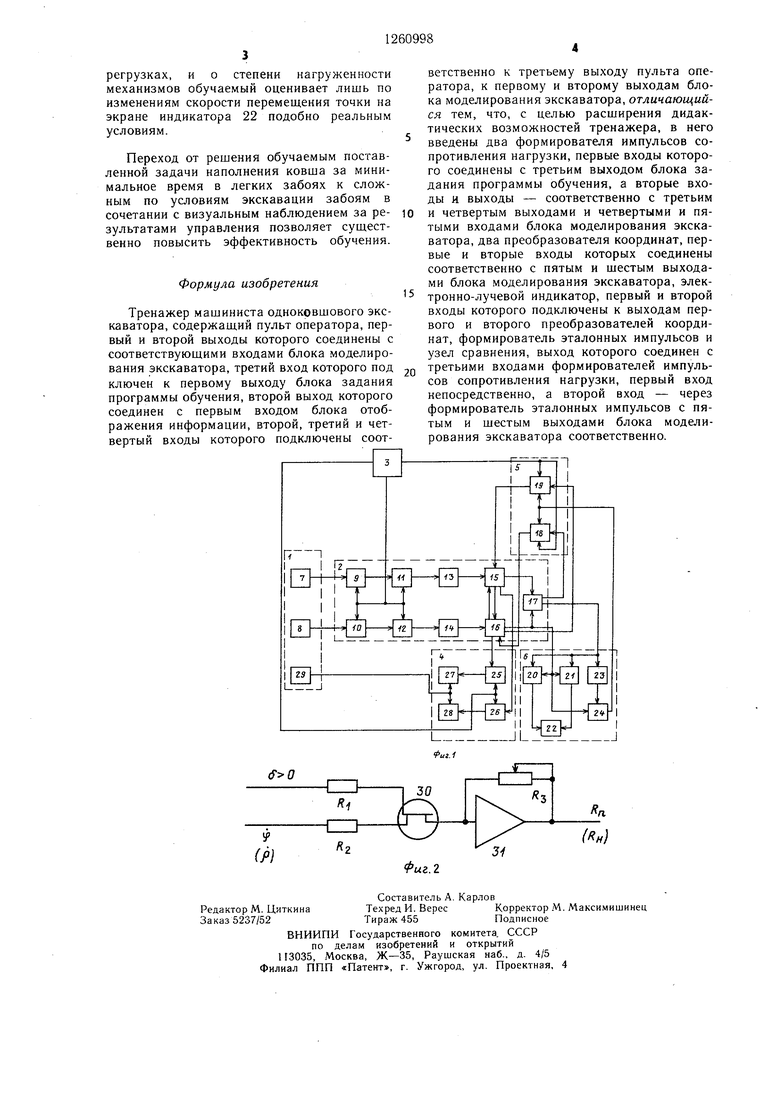
На фиг. 1 представлена функциональная схема тренажера; на фиг. 2 - формирователи импульсов сопротивления нагрузке.
Тренажер (фиг. 1) состоит из пульта 1 оператора, блока 2 моделирования экскаватора, блока 3 задания программы обучения, блока 4 отображения информации, блока 5 имитации свойств забоя, блока 6 имитации визуальной обстановки.
Пульт 1 содержит командоаппараты приводов подъема 7 (КАП) и напора 8 (КАН).
Блок 2 содержит электронные модули узлов системы управления приводами на магнитных усилителях 9 и 10, генераторов 11 и 12 постоянного тока, электродвигателей 13 и 14 постоянного тока приводов и электронные модули подъемного 15 и напорного 16 механизмов, а также кинематического узла 17 подъемный канат - рукоять - ковш.
Блок 4 состоит из информационных табло.
Блок 5 содержит два одинаковых формирователя 18 и 19 импульсов сопротивления нагрузки резанию и напору и предназначен для формирования сигналов имитации сопротивления копанию, пропорциональных скорости перемещения ковша вдоль забоя.
Блок 6 предназначен для отображения расположения ковша относительно забоя, скорости его перемещения и содержит преобразователи 20 и 21 координат вычисления горизонтальной и вертикальной координат ковша, подаваемых на горизонтальный и вертикальный входы узла управления лучом электронно-лучевого индикатора 22 (ЭЛТ), а также формирователь 23 эталонного импульса (вычисления заданного радиуса забоя выбранного профиля) и узел 24 сравнения (вычисления толщины срезаемой ковшом стружки).
На экране индикатора 22 нанесена линия, являющаяся отображением заданного профиля забоя, относительно которой при управлении копанием машинист перемеш.ает световую точку, являющуюся отображением ковша.
Преобразователи 20 и 21 выполнены в виде следящей системы по значению угла поворота рукояти с синусно-конусными потенциометрами. На вход формирователя 23 подается сигнал угла поворота рукояти с выхода узла 17 модели кинематической схемы копающих механизмов, а на входы
узла 24 - значения текущего радиуса, напора с выхода узла- 16 и заданного профиля с выхода формирователя 23, в результате чего на выходе узла 24 получаем сигнал о величине внедрения ковша в. забой, т. е. толщине срезаемой стружки. Блок 4 содержит пороговые элементы 25 и 26 и табло 27 и 28 превыщения нагрузок в механизмах напора и подъема над допустимым. Пульт 1 содержит кнопку 29 сброса блока 4.
На фиг. 2 приведена схема электронной модели формирователей 18 и 19 вычисления усилий сопротивления резанию и напору. При срезании стружки открывается
, ключ 30 на полевом транзисторе во входной цепи масштабного усилителя 31, подавая на его вход сигнал, являющийся аналогом скорости подъема ковша (по скорости поворота рукояти в узле 18) или скорости внедрения его в забой (по скорости на0 пора в узел 19). На входе усилителя 3 появляется сигнал, пропорциональный величине входного сигнала и значению сопротивления вцепи обратной связи, являющегося аналогом коэффициента сопротивления копан-ию. Блок 3 предназначен для изменения ре5 жимов работы на тренажере и изменения параметров моделей и содержит ключи для отключения пороговых элементов 25 и 26 в блоке 4 на конечной стадии обучения.
В состав блока 3 входят установочные резисторы формирователей 18 и 19, а также переключатели для изменения параметров электронных моделей магнитных усилителей и генераторов при переходе на другие системы привода .механизмов.
Электронные модели узлов блока 2 выполнены на базе интегральных операционных усилителей.
Тренажер работает следующим образом. Обучаемый, управляя положением органов управления, изменяет режимы математических моделей электроприводов подъе0 ма и напора. За процессом копания он наблюдает по движению светящейся точки на экране индикатора 22 относительно линии, отображающей профиль забоя. О степени внедрения ковща в забой машинист судит по отклонению точки от линии за5 боя, а о нагрузках, формируемых в механизмах, - по изменениям скорости перемещения точки. В случае перегрузок механизмов загораются информационные табло 27 и 28, сброс показаний которых выполняется кнопкой 29. В процессе обучения инструктор имеет возможность изменять блоком 3 свойства машины (приводов) и забоя, усложняя задачи обучаемому (переход от инерционных систем приводов к малоинерционным, например тиристорным, и
5 от разработки мягких грунтов к скальному забою).
На конечной стадии обучения блоком 3 отключаются информационные сигналы о пео
5
регрузках, и о степени нагруженности механизмов обучаемый оценивает лишь по изменениям скорости перемещения точки на экране индикатора 22 подобно реальным условиям.
Переход от решения обучаемым поставленной задачи наполнения ковша за минимальное время в легких забоях к сложным по условиям экскавации забоям в сочетании с визуальным наблюдением за ре- зультатами управления позволяет существенно повысить эффективность обучения.
Формула изобретения
Тренажер машиниста одноковшового экскаватора, содержащий пульт оператора, первый и второй выходы которого соединены с соответствующими входами блока моделирования экскаватора, третий вход которого под ключей к первому выходу блока задания программы обучения, второй выход которого соединен с первым входом блока отображения информации, второй, третий и четвертый входы которого подключены соот
Q
ветственно к третьему выходу пульта оператора, к первому и второму выходам блока моделирования экскаватора, отличающийся тем, что, с целью расширения дидактических возможностей тренажера, в него введены два формирователя импульсов сопротивления нагрузки, первые входы которого соединены с третьим выходом блока задания программы обучения, а вторые входы и выходы - соответственно с третьим и четвертым выходами и четвертыми и пятыми входами блока моделирования экскаватора, два преобразователя координат, первые и вторые входы которых соединены соответственно с пятым и шестым выходами блока моделирования экскаватора, электронно-лучевой индикатор, первый и второй входы которого подключены к выходам первого и второго преобразователей координат, формирователь эталонных импульсов и узел сравнения, выход которого соединен с третьими входами формирователей импульсов сопротивления нагрузки, первый вход непосредственно, а второй вход - через формирователь эталонных импульсов с пятым и шестым выходами блока моделирования экскаватора соответственно.
Редактор М. Циткина Заказ 5237/52
Фиг.2
Составитель А. Карлов
Техред И. ВересКорректор М
Тираж 455Подписное
ВНИИПИ Государственного комитета. СССР
по делам изобретений и открытий
И3035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| Стенд для испытаний одноковшовых экскаваторов | 1987 |
|
SU1469032A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Устройство для отображения учебной информации | 1986 |
|
SU1322357A1 |
| Рабочее оборудование экскаватора | 1976 |
|
SU651090A1 |
| ТРЕНАЖЕР ОПЕРАТОРА | 1991 |
|
RU2065622C1 |
Изобретение относится к тренажерам для профессиональной подготовки машинистов одноковшовых экскаваторов с рабочим оборудованием типа «прямая лопата. Целью изобретения является расш11рение дидактических возможностей тренажера с повышением эффективности обучения машиниста экскаватора управлению рабочими режимами. Поставленная цель достигается имитацией свойств забоя и визуальной обстановки, что позволяет обучаемому контролировать результаты управления и моделировать различные значения сопротивления копанию, что обеспечивает ловышение эффективности процесса обучения. 2 ил. S б ьэ о о со 00
| Тренажер экскаватора | 1980 |
|
SU909616A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Тренажер водителя землеройной машины | 1981 |
|
SU982066A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
