117
Изобретение относится к области робототехники н может быть HCiioJihc-. зонано в технологических операциях, требующих расположения рабочего органа с учетом конфигурации обрабатываемого участка.
Целью изобретения является повышение точности и быстродействия перемещения рабочего органа.
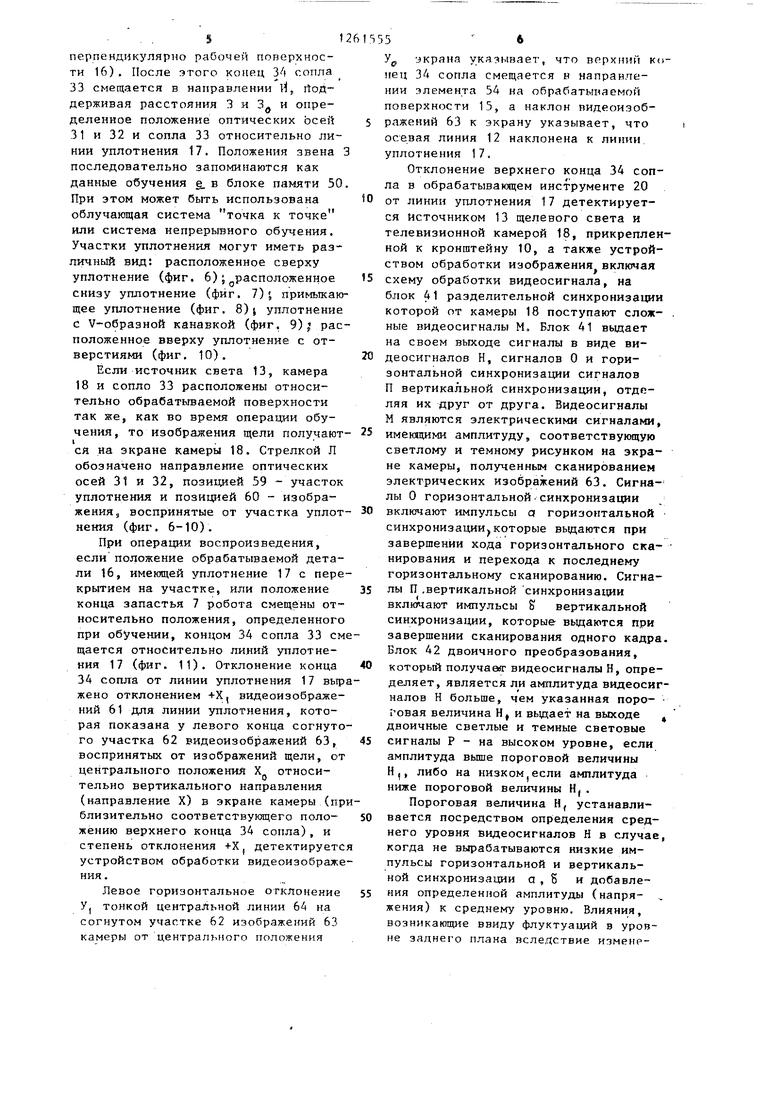
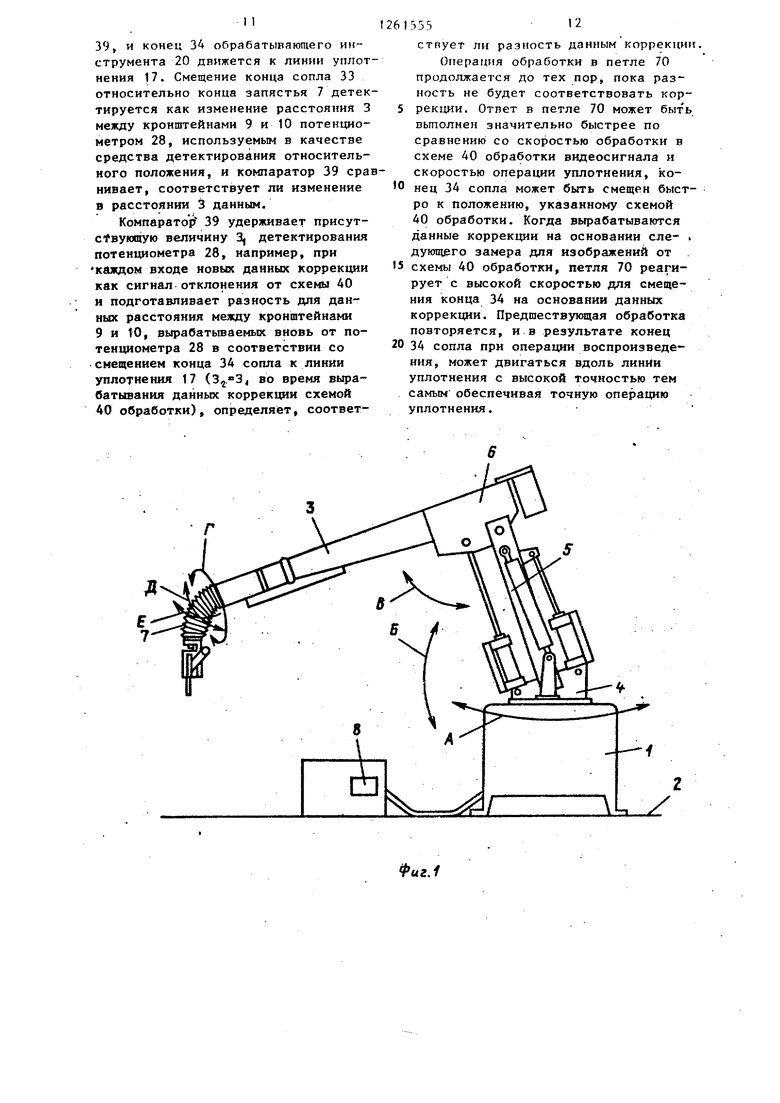
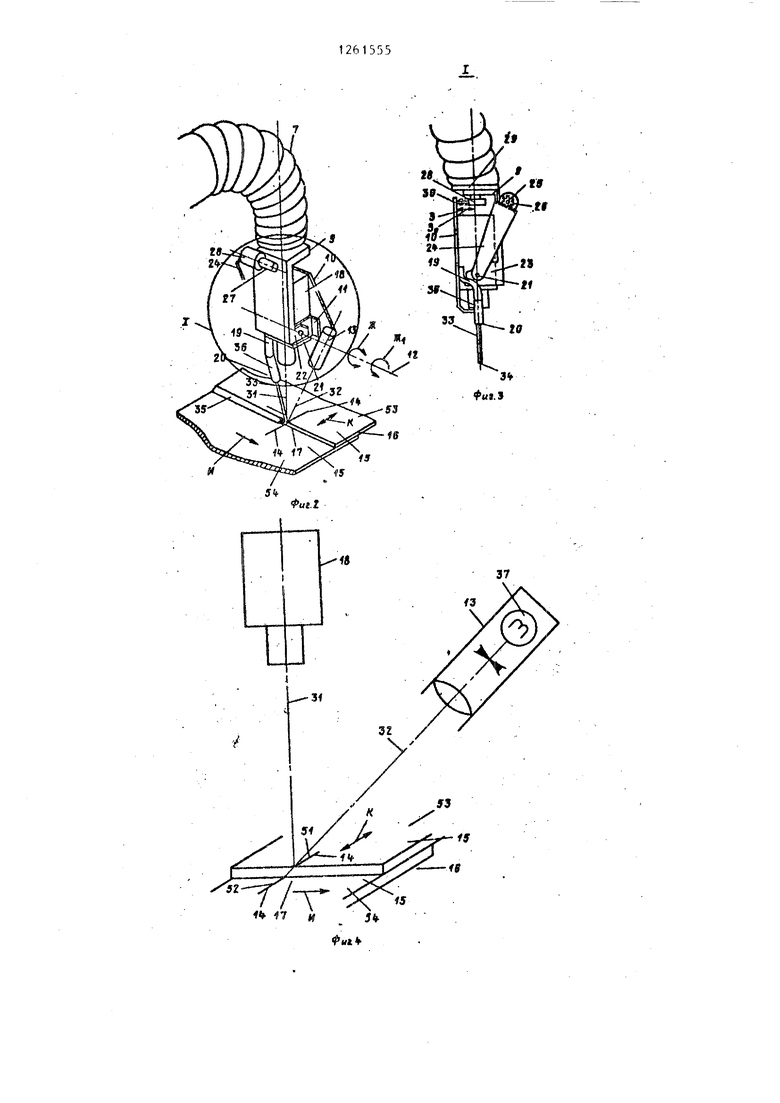
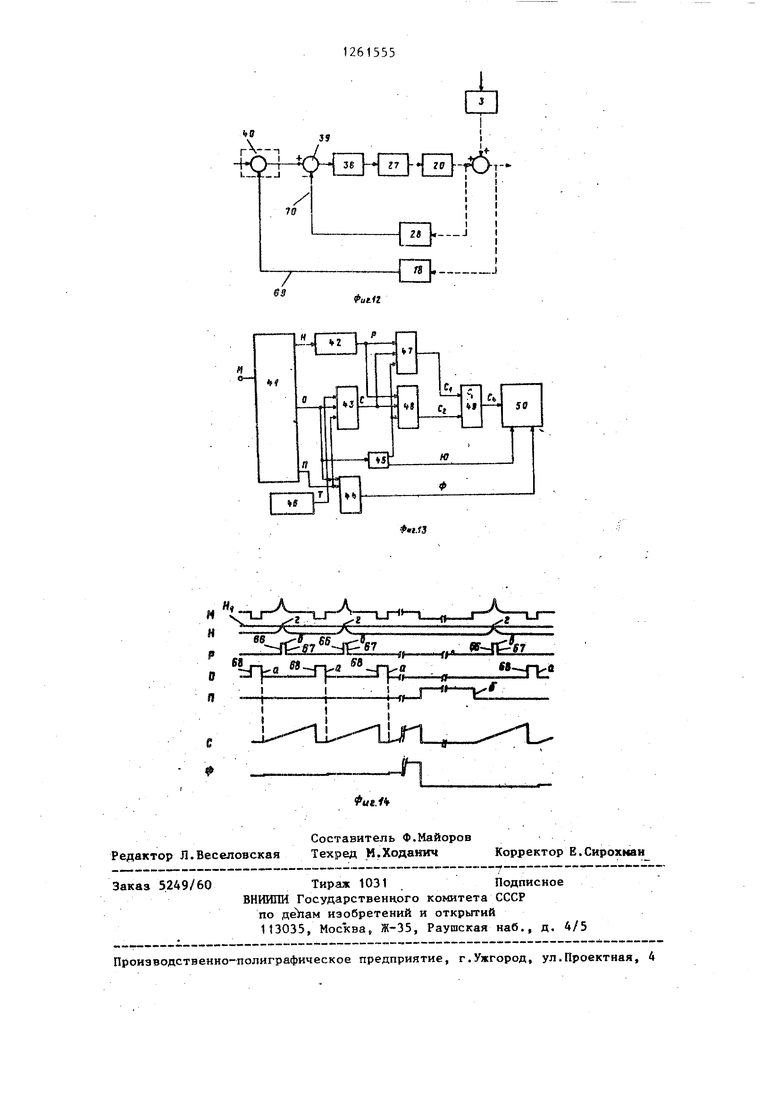
На фиг. 1 изображен робот, оби1ий ВИД1 на фиг. 2 - рабочая головка робота; на фиг. 3 - узел I на фиг. 2, на фиг. 4 - схема устройства для исследования стыка; на фиг. 5 изображение, воспринимаемое телевизионной камерой на фиг. 6-10 - виды различных участков уплотнения и изображения, воспринимаемые телевизиот ной камерой с этих участков; на фиг. 11 - оптический разрез (конец сопла удален от линии уплотнения), на фиг. 12 - блок-схема управления роботом; на фиг. 13 - схема обработки видеосигнала, на фиг. 14 - график иллюстрирующий временную зависимость
различных сигналов в схеме на фиг.12 I ..
Робот, для управления которым
используется изобретение, включает платформу 1, установленную на основании 2, звено 3, связанное с платформой через кинематическую цепь, образованную диском 4, установленным на платформе с возможностью поворота в направлении Д, первой секцией 5 с приводом ее поворота относительно диска 4 в направлении Ь, второй секцией 6 с приводом ее поворота относительно первой секции в направлении В. На конце звена 3 расположено запястье 7 типа слоновьи хобот, один конец которого закреплен на звене 3, а другой имеет возможность поворота относительно звена 3 в трех направлениях: Г, Д и Е (фиг, 1). Положение звена 3, т.е. положение диска 4 относительно платформы 1, положение первой секции 5 относительно диска 4, положение второй секции 6 относительно первой секции 5 и положение конца запястья 7 относительно второй секции 6 устанавливаются последовательно на основании серии обучающих данных, предварительно введенных в устройстйо 8 управления роботом. На свободном конце запястья 7 установлена рабочая головка робота, включающая кронштейн 9, закрепленный на запястье 7, и кронштейн 10, прикрепленный к кронштейну 9 при помоши соединитель)1ого элемента 1 1 с возможностью поворота вокруг оси 12 для коррекции в направлении Ж. Соединительный элемент 11 имеет возможность поворота относительно кронштейна 9 вокруг оси 12, К кронштейну 10 прикреплены щелевой источник 13 света или проектор изоб1)ажения щели для проецирования изображений щели 14 на поверхность 15 обрабатываемой детали 16, имеющей неравномерный соединительный участок 17, телевизионная камера 18 в качестве воспринимающего изображение средства, в которой использованы полупроводниковые воспринимающие изображение элементы или им подобные для восприятия изображений щели 14 на поверхности 15, и основание 19 обрабатывающего инструмента 20 робота. Вал 21, используемый для поворота кронштейна 10 к кронштейну 9, прикреплен своим центром к камере 18 и опирается концами на боковые выступы 22 и 23 кронштейна 9 соответственно. Кроме того, один конец вала 21 соединен с секторной щестерней 24, которая зацеплена с шестерней 25. Шестерня 25 выполнена за одно целое с приводным валом замедлителя 26 скорости, соединенного с мотором 27, имекхцим хорошую чувствительность (например, мотором без сердечника) и прикреп- , ленным к кронштейну 9 наружным корпу сом. Щелевой источник 13 света, камера 18 и обрабатывающий инструмент 20 размещены с возможностью поворота за одно целое вокруг оси 12 в зависимости от вращения мотора 27. Потенциометр 28, установленный между основанием 29 кронштейна 9 и свободным концом 30 кронштейна 10 в качестве средства для детектирования положения обрабатывающего узла относительно звена 3, детектирует расстояние 3 между центром основания 29 кронштейна 9 и свободным концом 30 кронштейна 10, соответствующее углу вращения мотора 27, т.е. угол вращения кронштейна к кронштейну 9 вокруг оси 12.
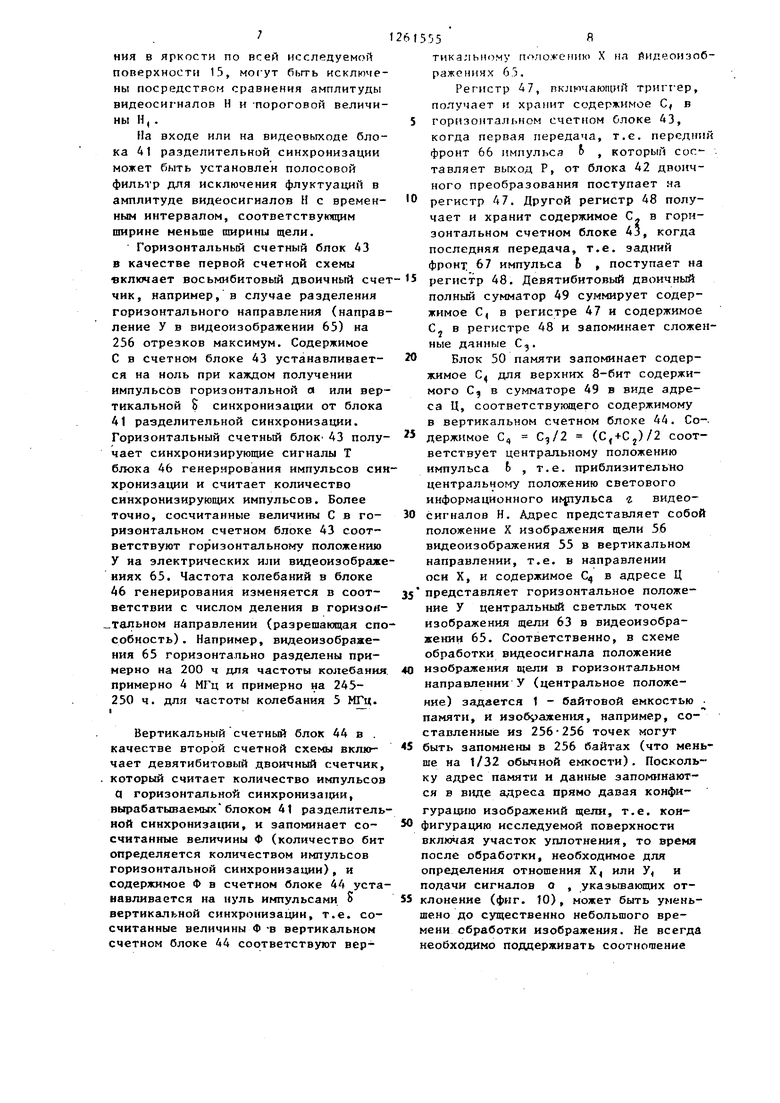
Фотовоспринимающая оптическая ось 31 камеры 18, т.е. ее центральная ось, установлена по одной линии с центральной осью конца запястья 7 и расположена перпендикулярно к 1 ния в яркости по всей исследуемой поверхности 15, мосут быть исключе ны гюсредстяом сравнения амплитуды видеосигналов Н и -пороговой величи ны Н, . На входе или на видеовыходе бло ка 41 разделительной синхронизации может быть установлен полосовой фильтр для исключения флуктуации в амплитуде видеосигналов Н с времен ным интервалом, соответствующим ширине меньше ширины щели. Горизонтальный счетный блок A3 в качестве первой счетной схемы включает восьмибитовый двоичньй сче чик, например, в случае разделения горизонтального направления (направ ление У в видеоизображении 65) на 256 отрезков максимум. Содержимое С в счетном блоке 43 устанавливается на ноль при каждом получении импульсов горизонтальной а или вер тикальной % синхронизации от блока 41 разделительной синхронизации. Горизонтальный счетный блок 43 полу чает синхронизирующие сигналы Т блока 46 генерирования импульсов си хронизации и считает количество синхронизирующих импульсов. Более точно, сосчитанные величины С в горизонтальном счетном блоке 43 соответствуют горизонтальному положению У на электрических или видеоизображ ниях 65. Частота колебаний в блоке 46 генерирования изменяется в соответствии с числом деления в горизон тальном направлении (разрешающая сп собность) . Например, видеоизображения 65 горизонтально разделены примерно на 200 ч для частоты колебания примерно 4 МГц и примерно на 245250 ч. для частоты колебания 5 МГц. Вертикальный счетный блок 44 в . качестве второй счетной схемы включает девятибитовый двоичный счетчик . который считает количество импульсов q горизонтальной синхрониза1Ц1и, вырабатываемых блоком 41 разделитель ной синхрониза1р{и, и запоминает сосчитанные величины Ф (количество бит определяется количеством импульсов горизонтальной синхронизации), и содержимое Ф в счетном блоке 44 уста навливается на нуль импульсами S вертикальной синхронизации, т.е. сосчитанные величины Ф -в вертикальном счетном блоке 44 соответствуют вер55Ятикальному по.гюжеиию X на йпдеоизображсниях 65. Регистр 47, включающий трип-ер, получает и храпит содержимое С в горизонтальном счетном блоке 43, когда первая передача, т.е. передний фронт 66 лмпульсз f , которым составляет выход Р, от блока 42 двоичного преобразования поступает на регистр 47. Другой регистр 48 получает и хранит содержимое С- в горизонтальном счетном блоке 43, когда последняя передача, т.е. задний фронт; 67 импульса Ь , поступает на регистр 48. Девятибитовый двоичный полный сумматор 49 суммирует содержимое С, в регистре 47 и содержимое Cj в регистре 48 и запоминает сложенные данные С. Блок 50 памяти запоминает содержимое С для верхних 8-бит содержимого С, в сумматоре 49 в виде адреса Ц, соответствующего содержимому в вертикальном счетном блоке 44. Со-. держимое С, С,/2 (C,+Cj)/2 соответствует центральному положению и}чпульса 6 , т.е. приблизительио центральному положению светового информационного иь ульса г видеосигналов Н. Адрес представляет собой положение X изображения щели 56 видеоизображения 55 в вертикальном направлении, т.е. в направлении оси X, и содержимое С в адресе Ц представляет горизонтальное положение У центральный светлых точек изображения щели 63 в видеоизображении 65. Соответственно, в схеме обработки видеосигнала положение изображения щели в горизонтальном направленииУ (центральное положение) задается 1 - байтовой емкостью памяти, и изображения, например, составленны(е из 256-256 точек могут быть запомнены в 256 байтах (что меньше на 1/32 обычной емкости). Поскольку адрес памяти и данные запоминаются в виде адреса прямо давая конфигурацию изображений щели, т.е. конигурацию исследуемой поверхности включая участок уплотнения, то время осле обработки, необходимое для пределения отношения Х или У, и одачи сигналов о указывающих отлонение (фиг. 10), может быть уменьено до существенно небольшого вреени обработки изображения. Не всегда еобходимо поддерживать соотношение
12
Ц Ф, поскольку соответствие 1:1 по;щерживается между адресом и содержимым Ф в блоке 44-и, например, может быть осущестплена индексная модификация.
Согласование во времени для записи данных Ф в блок 50 памяти регулируется синхронизатором.А5, который работает при возрастании передних фронтов 68 импульсов о горизонтальной синхронизации, таким образом, что синхронизатор 45 подает стробирующий сигнал записи Ю в блок 50 памяти по прибытии переднего фронта 68 импульса а в синхронизатор 45, тем самым побуждая блок 50 памяти запомнить данные С от сумматора 49 в виде адреса Ц и после этого устанавливает на нуль содержимое С,, С,; в регистрах 47 и 48.
Устройство для управления роботом имеет две петли 69 и 70 обратной связи, причем большая петля 69 проводу-гт с высокой точностью основное размещение верхнего конца 34 сопла относительно линии уплотнения 17 и расположение может быть выполнено более быстро и точно посредством объединенного использования меньшей петли 70 с большей петлей 69. В петле 69 положение звена 3 или положение конца запястья 7 определяется на основании обучающих данных, поскольку в начале операции воспроизведения расстояние 3 равно расстоянию Зд, начальное положение наконечника сопла 33, основанное на положении звена 3, определяется по обучаю1гр- М данным.
Положение конца ЗД сопла 33 относительно уплотнительной линии 17 воспринимается камерой 18, спаренной с щелевым оптическим источником 13. Если обнаруживается наличие отклонения конца 34 от линии 35 уплотнения на основании воспринятых изображений, направление и протяженност отклонения определяются в схеме 40 обработки видеосигнала, и сигнал отклонения вырабатывает данные, выражющие необходимую коррекцию от схемы обработки. Эти данные посылаются через усилитель 38 к мотору 27 Усилитель 38 вращает мотор 27 в заданном напраплении на основаняи данных для смещения конца 34 сопла 33 обрабатывающего инструмента 20 к линии уплотнения 17. Положение конца 34 о.)И
иоситол ы1о линии ур.пптнеиия 17 поггтринимастся камерой 18. Наличие и/(и отсутствие отклонония Х, от опорного положения его направление и величина детектируются снова в схеме 40 обра ботки на основании .воспринятых изабражений, и операция обратной связи проводится в петле 69 до тех пор, пока конец 34 не совпадает с линией уплотнения 17.
Если скорость опера1У1и по коррекции в петле 69 достаточно высока по сравнению со скоростью движения кон- . ца 34 сопла, то положение конца 34 может быть скорректировано фактически во время операций уплотнения только петлей 69 так, что конец 34 может всегда двигаться вдоль линии 17 уплотнения. Такой способ коррек ции обеспечивается тем, что степень свободы конца 34 сопла к концу запястья 7 уменьшается, а также тем, что положение звена 3 относительно платформы 2 регулируется обучающими данными, а положение конца 34 сопла независимо от звена 3 так, чтобы компенсировать отклонение Х конца 34 сопла относительно действительной линии 17 обработки. Однако, 30 если время t , необходимое для распознавания рисунка видеоизображения для изображений щели на основании данных Cjj, запоминаемых сериями адресов Ц в блоке 50 памяти одновре35 менно со сканированием электрических изображений и детектированием отклонения X, схемой 40 обработки видеосигнала с высокой скоростью обработки существенно мало по сравнению с 40 временем взятия замера t для изображений в схеме 40 обработки (например, 1/50 или 1/60 с в случае растрового сканирования без-чередования), необходимо для более точной и быст45 рой операции уплотнения осуществлять регулирование коррекции для компенсации отклонения X, по меньшей мере в каждый период времени (). Такое регулирование коррекции дости50 гается меньшей петлей 70 обратной связи.
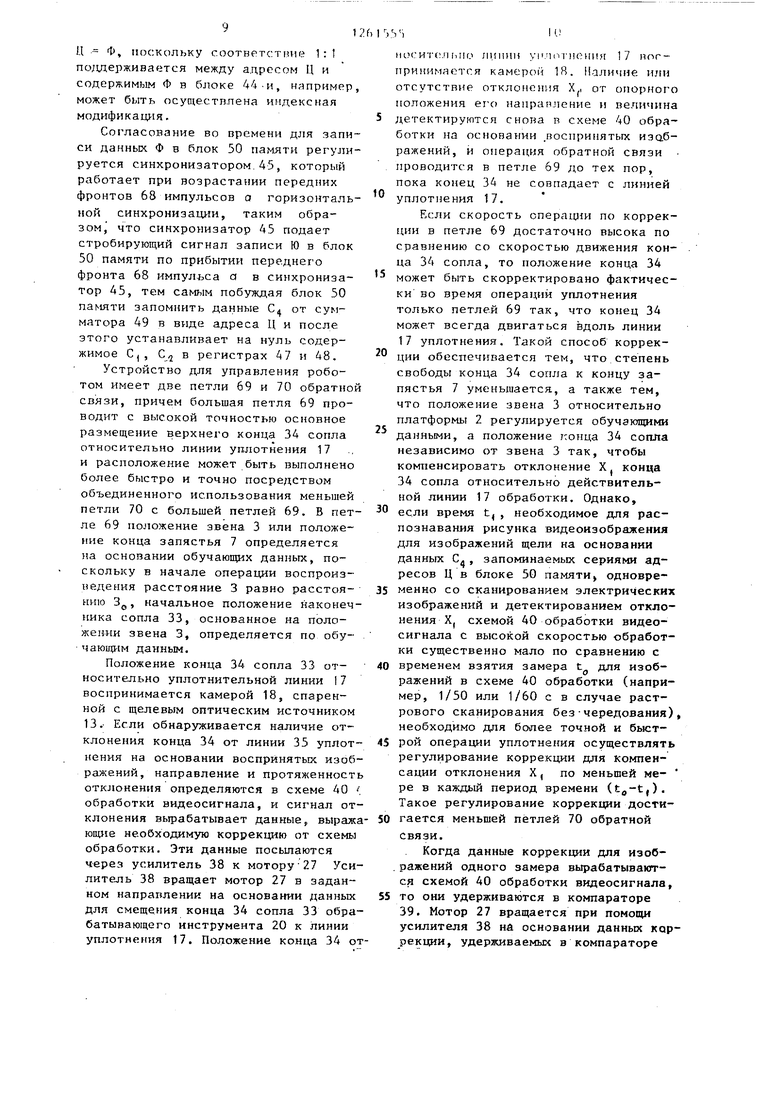
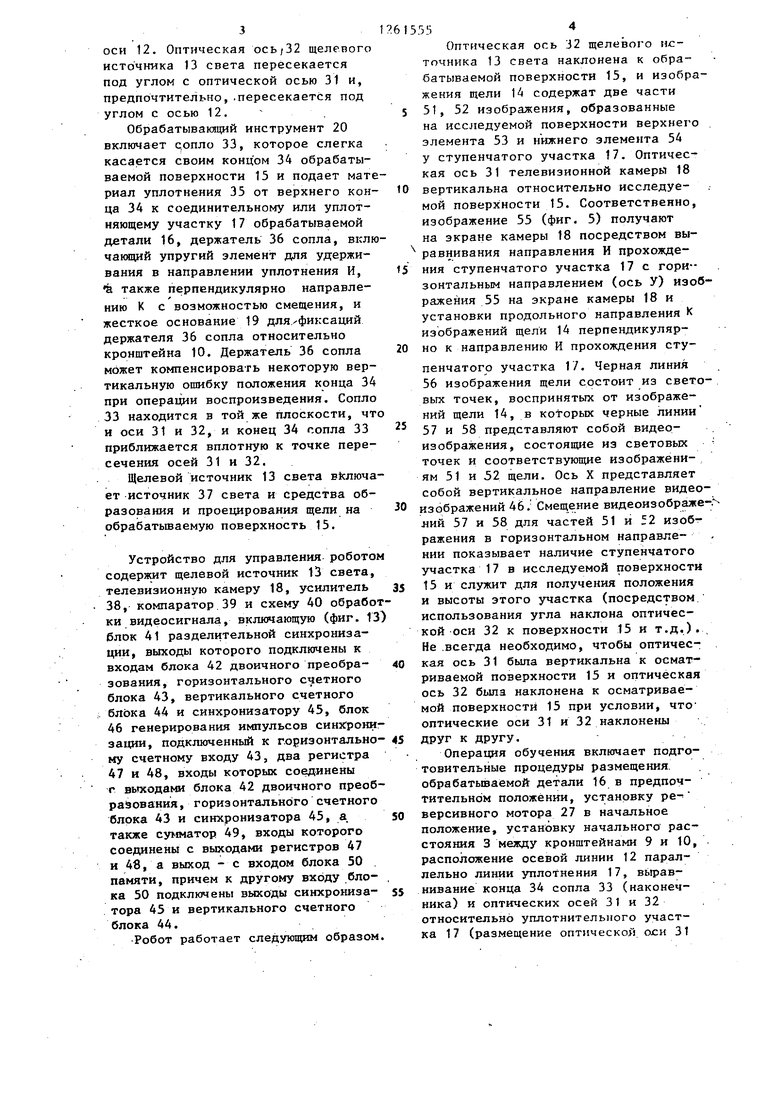
Когда данные коррекции для изоб. ражений одного замера вырабатываиггся схемой 40 обработки видеосигнала, 55 то они удерживаются в компараторе 39. Мотор 27 вращается при noMonuf усилителя 38 на основании данных карpeKipiH, удерзкиваемых в компараторе оси 12. Оптическая ось/32 щелевого источника 13 света пересекается под углом с оптической осью 31 и, предпочтительно, .пересекается под углом с осью 12. Обрабатывающий инструмент 20 включает с.опло 33, которое слегка касается своим концом 34 обрабатываемой поверхности 15 и подает мат риал уплотнения 35 от верхнего кон ца ЗА к соединительному или уплотняющему участку 17 обрабатываемой детали 16, держатель 36 сопла, вкл чакнций упругий элемент для удерживания в направлении уплотнения И, а также перпендикулярно направлению К с возможностью смещения, и жесткое основание 19 дляхфиксаций держателя 36 сопла относительно кронщтейна 10, Держатель 36 сопла может компенсировать некоторую вертикальную ошибку положения конца 34 при операции воспроизведения. Сопло 33 находится в той же плоскости, чт и оси 31 и 32, и конец 34 сопла 33 приближается вплотную к точке пересечения осей 31 и 32. Щелевой источник 13 света включа ет источник 37 света и средства образования и проецирования щели на обрабатьшаемую поверхность 15. Устройство для управления робото содержит щелевой источник 13 света, телевизионную камеру 18, усилитель 38, компаратор 39 и схему 40 обрабо ки видеосигнала, включающую (фиг. 13 блок 41 разделительной синхронизации, выходы которого подключены к входам блока 42 двоичного преобразования, горизонтального счетного блока 43, вертикального счетного ; блока 44 и синхронизатору 45, блок 46генерирования импульсов синхрони зации, подключенный к горизонтально му счетному входу 43, два регистра 47и 48, входы которых соединены г выходами блока 42 двоичного преоб ра зования, горизонтального счетного блока 43 и синхронизатора 45, а. также сумматор 49, входы которого соединены с выходами регистров 47 и 48, а выход - с входом блока 50 памяти, причем к другому входу блока 50 подключены выходы синхронизатора 45 и вертикального счетного блока 44. Робот работает следующим образом 554 Оптическая ось 32 щелевого источника 13 света наклонена к обрабатываемой поверхности 15, и изображения щели 14 содержат две части 51, 52 изображения, образованные на исследуемой поверхности верхнего элемента 53 и нижнего элемента 54 у ступенчатого участка 17. Оптическая ось 31 телевизионной камеры 18 вертикальна относительно исследуемой поверхности 15. Соответственно, изображение 55 (фиг. 5) получают на экране камеры 18 посредством выравнивания направления И прохождения ступенчатого участка 17 с горизонтальным направлением (ось У) изображения 55 на экране камеры 18 и установки продольного направления К изображений щели 14 перпендикулярно к направлению И прохождения ступенчатого участка 17. Черная линия 56изображения щели состоит из световых точек, воспринятых от изображений щели 14, в которых черные линии 57и 58 представляют собой видеоизображения, состоящие из световых точек и соответствующие изображениям 51 и 52 щели. Ось X представляет собой вертикальное направление видеоизображений 46. Смещение видеоизображе- ЛИЙ 57 и 58 для частей 51 и 52 изоб-г ражения в горизонтальном направлении показывает наличие ступенчатого участка 17 в исследуемой поверхности 15 и служит для получения положения и высоты этого участка (посредством использования угла наклона оптической оси 32 к поверхности 15 и т.д.).. Не .всегда необходимо, чтобы оптическая ось 31 была вертикальна к осматриваемой поверхности 15 и оптическая ось 32 была наклонена к осматриваемой поверхности 15 при условии, что оптические оси 31 и 32 наклонены друг к другу. Операция обучения включает подготовительные процедуры размещения, обрабатьшаемой детали 16 в предпочтительном положении, установку реверсивного мотора 27 в начальное положение, установку начального расстояния 3 между кронштейнами 9 и 10, асположение осевой линии 12 паралельно линии уплотнения 17, вьфавивание конца 34 сопла 33 (наконечика) и оптических осей 31 и 32 тносительно уплотнителыюго участа 17 (размещение оптической оси 31 перпендикулярно рабочей поверхности 16), После этого конец 34 сопла 33 смещается в направлении 1, йоддерживая расстояния 3 и 3 и определенное положение оптических осей 31 и 32 и сопла 33 относительно линии уплотнения 17. Положения звена последовательно запоминаются как данные ot5y4eHMH §. в блоке памяти 50 При этом может быть использована облучающая система точка к точке или система непрерывного обучения. Участки уплотнения могут иметь различный вид: расположенное сверху уплотнение (фиг. 6)i расположенное снизу уплотнение (фиг. 7) примыкаю щее уплотнение (фиг. 8)j уплотнение с V-образной канавкой (фиг. 9) рас положенное вверху уплотнение с отверстиями (фиг. 10). Если источник света 13, камера 18 и сопло 33 расположены относительно обрабатываемой поверхности так же, как во время операции обучения, то изображения щели получают ся на экране камеры 18. Стрелкой Л обозначено направление оптических осей 31 и 32, позицией 59 - участок уплотнения и позицией 60 - изображенинS воспринятые от участка уплот нения (фиг. 6-10). При операции воспроизведения, если положение обрабатываемой детали 16, имеющей уплотнение 17 с пере крытием на участке, или положение конца запастья 7 робота смещены относительно положения, определенного при обучении, концом 34 сопла 33 см щается относительно линий уплотнения 17 (фиг. 11). Отклонение конца 34 сопла от линии уплотнения 17 вьф жено отклонением , видеоизображений 61 для линии уплотнения, которая показана у левого конца согнуто го участка 62 видеоизображений 63, воспринятых от изображений щели, от центрального положений Х относительно вертикального направления (направление X) в экране камеры (п близительно соответствующего положению верхнего конца ЗА сопла), и степень отклонения -t-X детектирует устройством обработки видеоизобрал: ния. Левое горизонтальное отклонение У, тонкой центральной линии 64 на согнутом участке 62 изображений 63 камеры от центрального положения экрана указывает, что верхний коец 34 сопла смещается н направлении элемента 54 на обрабатываемой оверхности 15, а наклон видеоизображений 63 к экрану указывает, что осевая линия 12 наклонена к ли1П1и уплотнения 17, Отклонение верхнего конца 34 сопла в обрабатывающем инструменте 20 от линии уплотнения 17 детектируется Источником 13 щелевого света и телевизионной камерой 18, прикрепленной к кронштейну 10, а также устройством обработки изображения включая схему обработки видеосигнала, на блок 41 разделительной синхронизации которой от камеры 18 поступают слож- . ные видеосигналы М. Блок 41 выдает на своем выходе сигналы в виде видеосигналов Н, сигналов О и горизонтальной синхронизации сигналов П вертикальной синхронизации, отдоляя их друг от друга. Видеосигналы М являются электрическими сигналами, имеющими амплитуду, соответствующую светлому и темному рисунком на экране камеры, полученным сканированием электрических изображений 63. Сигналы О горизонтальной синхронизации включают импульсы а горизонтальной синхронизации которые выдаются при завершении хода горизонтального сканирования и перехода к последнему горизонтальному сканированию. Сигналы П .вертикальной синхронизации включают импульсы S вертикальной синхронизации, которые выдаются при завершении сканирования одного кадра. Блок 42 двоичного преобразования, которьй получает видеосигналы Н, определяет, является ли амплитуда видеосигналов Н больше, чем указанная поре- Говая величина Н и выдает на выходе двоичные светлые и темные световые сигналы Р - на высоком уровне, если амплитуда вьше пороговой величины Нр либо на низком I если амплитуда ниже пороговой величины Н,. Пороговая величина Н, устанавливается посредством определения среднего уровня видеосигналов Н в случае, когда не вырабатываются низкие импульсы горизонтальной и вертикальной синхронизации а, 8 и добавления определенной амплитуды (напряжения) к среднему уровню. Влиянии, возникающие ввиду флуктуации в уровне заднего плана вследствие измене39, и конец 34 обрабатывающего инструмента 20 движется к линии уплотнения 7. Смещение конца сопла 33 относительно Конца запястья 7 детектируется как изменение расстояния 3 между кронштейнами 9 и 10 потенциометром 28, используемым в качестве средства детектирования относительного положения, и KONmaparop 39 сравнивает, соответствует ли изменение в расстоянии 3 данным.
Компаратор 39 удерживает присутс вующую величину 3, детектирования потенциометра 28, например, при каждом входе новых данных коррекции как сигнал отклонения от схемы 40 и подготавливает разность для данных расстояния между кронштейнами 9 и 10, вырабатьшаемых вновь от потенциометра 28 в соответствии со смещением конца 34 сопла к линии уплотнения 17 ( во время вырабатывания данных коррекции схемой 40 обработки), определяет, соответстпует ли разность данным коррекции.
Операция обработки в петле 70 продолжается до тех пор, пока раз ность не будет соответствовать коррекции. Ответ в петле 70 может быть выполнен значительно быстрее по сравнению со скоростью обработки в схеме 40 обработки видеосигнала и скоростью операции уплотнения, конец 34 сопла может быть смещен быстро к положению, указанному схемой 40 обработки. Когда вырабатываются данные коррекции на основании еле- дующего замера для изображений от 5 схемы 40 обработки, петля 70 реагирует с высокой скоростью для смещения конца 34 на основании данных коррекции. Предшествующая обработка повторяется, ив результате конец 34 сопла при операции воспроизведения, может двигаться вдоль линии уплотнения с высокой точностью тем самым обеспечивая точную операцию уплотнения.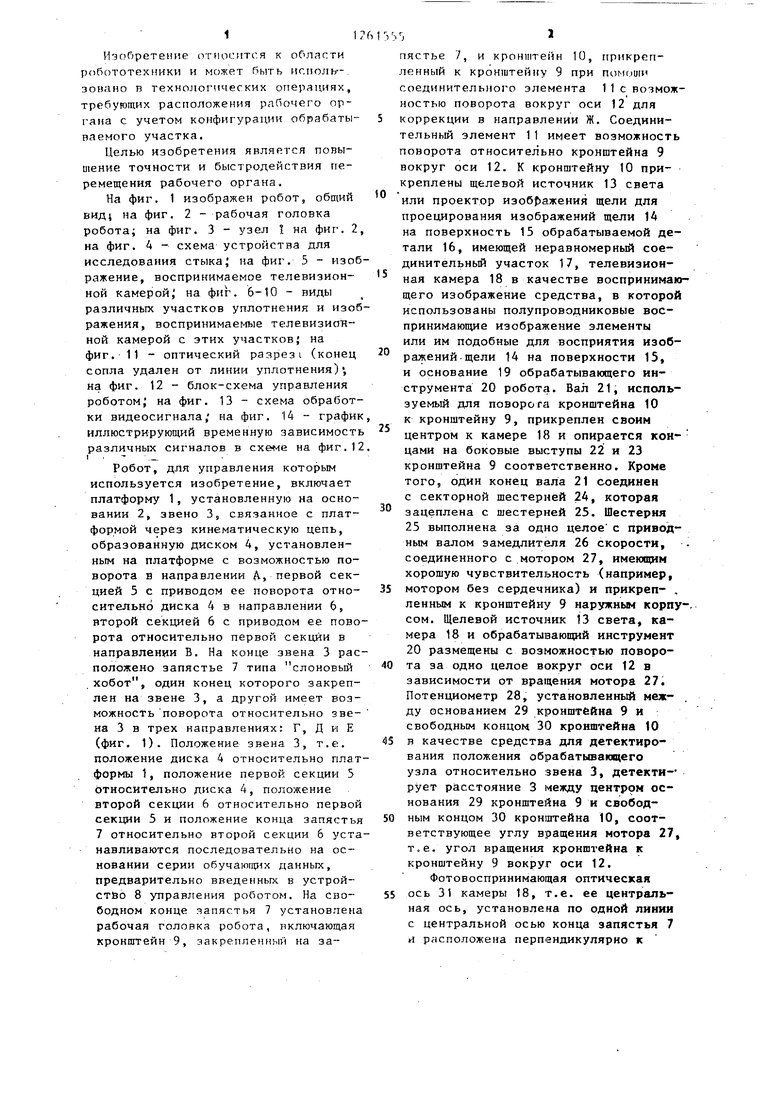
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1982 |
|
SU1258317A3 |
| Вакуумный пневмоусилитель тормозного привода транспортного средства | 1979 |
|
SU1052169A3 |
| Пневматический сервоусилитель | 1981 |
|
SU1210657A3 |
| Устройство для записи цветового видеосигнала и звуковых сигналов и устройство для воспроизведения цветового видеосигнала и звуковых сигналов | 1982 |
|
SU1371515A3 |
| Устройство для записи информации на светочувствительный носитель | 1987 |
|
SU1443014A1 |
| Гибкое плечо | 1982 |
|
SU1168089A3 |
| СПОСОБ И СХЕМЫ ИЗБИРАТЕЛЬНОГО ПОВЫШЕНИЯ ЧЕТКОСТИ (ВАРИАНТЫ) | 1995 |
|
RU2146425C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1988 |
|
SU1841031A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| ТЕЛЕВИЗИОННОЕ СРЕДСТВО НАБЛЮДЕНИЯ | 1993 |
|
RU2094956C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ, содержащее рабочую головку с приводом ее перемещения, излучатель светового йотока, приемник светорого потока и усилитель, выход которого присоединен к приводу, о т- л и ч а ю щ е е с я тем, что, с целью повышения трчности и быстродействия , оно содержит потенциометрический датчик для определения положения рабочей (сварочной) Золовки, компаратор и схему обработки видеосигналов , включающую блок двоичного : преобразования, горизонталькь C4etный блок, вертикальный счетный блок, синхронизатор, блок раздельной синхронизации, вькоды которого соединены с входами блока двоичного преобразования, горизонтального счетного блока и синхронизатора, блок -генерирования импульсов синхронизации, соединенный с входом горизонтального счетного блока, дварегистра, входы которых присоединены к выходам блбка . двоичного преобразования, горизонтального счетного блока и синхронизатора, а также блок памяти и сумматор, входы которого присоединены к выходам регистров, а выход присоединен к входу блока памяти, причем к другому входу блока памяти присоеСО динены выходы синхронизатора и верС тик льного счетного блока, при этом излучатель светового потока выполнен в виде щелевогоисточника света приемник светового потока - в виде . телевизионной камеры, выход которой . присоединен к одному из входов компа-. ратора, к другому входу которого присоединен потенциометрический датчик, этом выход компаратора присоеел динен к входу усилителя. Сл
Фиг.1
Л
TFr
Я.1.
f « J
5-7 56 /
- Y
v
ue.5
59
:(
Л
SO
° BO60SO
НИИ Kl H
ut.6ФикЛ
60
Фи,1в
Фиг. вФи1СЯ
| Технология судостроения | |||
| , 9 2, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
