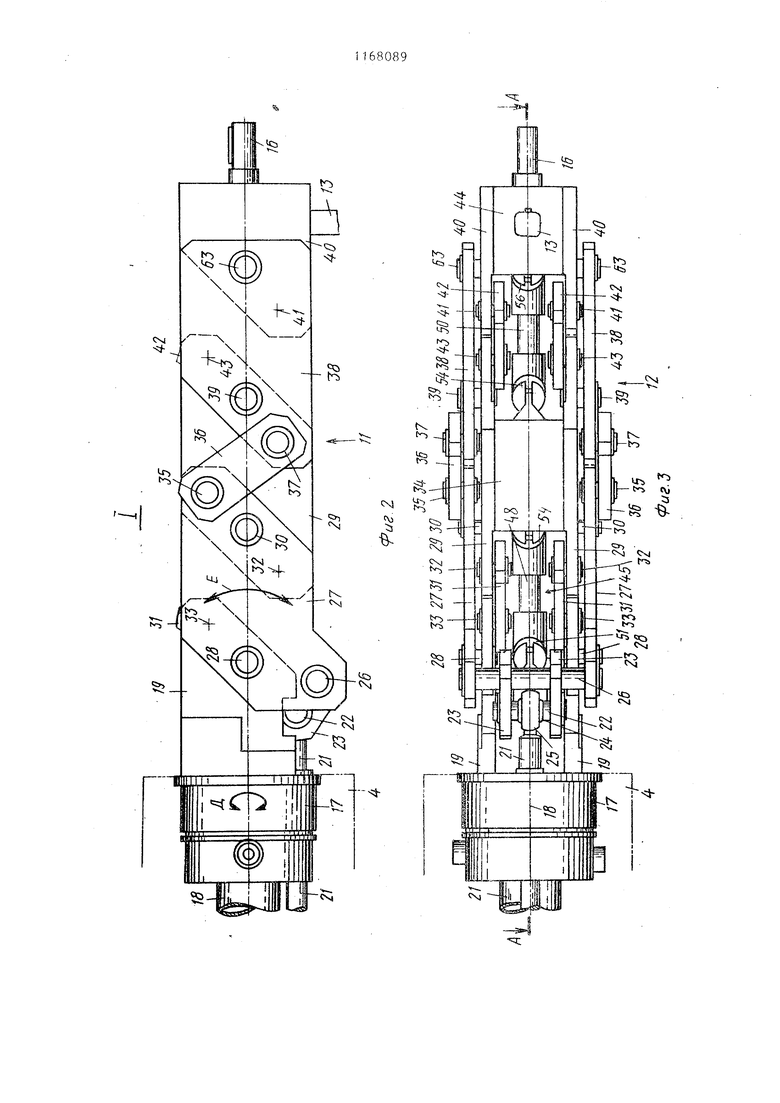
1 Изобретение относится к гибкому плечу, которое должно быть использовано в промьшшенном роботе или манипуляторе с программным управлением. Известно гибкое плечо, содержащее прикрепленные к несущему звену, первый, второй и третий элементы плеча, кинематически связанные элементами связи между собой и с приво дами вращения и продольного перемещ ния второго элемента плеча ll , Однако данное плечо характеризуется недостаточной гибкостью. Цель изобретения - повышение гибкости плеча. При использовании предлагаемого гибкого плеча обеспечивается возмож ность создать робот, который обладает таким широким диапазоном применений, что с его помощью можно обрабатывать заготовки, имеющие сложные формы, без затруднений. При этом гибкое плечо обладает достаточной жесткостью простой ко струкции, но без использования очен жестких элементов, которые могут точно устанавливать конец плеча без всякого изгиба. Поставленная цель достигается тем, в гибком плече, содержащем прикрепленные к несущему звену первый, второй и третий элементы плеча кинематически связанные элементами связи между собой и с приводами вращения и продольного перемещения второго элемента плеча, элементы св зи выполнены в виде пар. тяг, приче каждая тяга одним концом шарнирно соединена с одним концом предыдущего элемента плеча, а другим шарнирн соединена с последующим элементом плеча, при этом первый, второй и третий элементы плеча выполнены каж дый в виде пары планок, широкие стороны которых обращены друг к дру гу и связаны с установленными между ними тремя продольными тягами, соединенными посредством универсальных шарниров, причем первая продоль ная тяга установлена с возможностью вращенияГ посредством несущего звена а третья тяга, соединенная через вторую продольную тягу с первой про дольной тягой, установлена с возмож ностью вращения третьим элементом плеча. 92 На фиг. 1 изображен манипулятор, имеющий гибкое плечо, вид сбоку; на фиг. 2 - узел 1 на фиг. 1 (гибкие плечо)i на фиг. 3 - гибкое плечо, вид снизу; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - одна фаза работы гибкого плеча; на фиг. 6 вторая фаза работы гибкого плеча. Манипулятор 1 содержит платформу 2, опорную стойку 3, плечо 4. Стойка 3 установлена на поворотном столе 5, расположенном над платформой 2 так, что она вращается вокруг центральной оси 6 в направлении стрел-. ки Б, когда поворотный стол поворачивается. В платформе 2 установлен гидропривод для обеспечения поворота стола 5 в направлении Б. Стойка 3, соединенная с кронштейном поворотного стола 5 посредством вала 7, выполнена так, чтобы отклоняться или поворачиваться в направлении стрелки В в вертикальной плоскости под действием гидроцилиндра 8, который размещен между стойкой- 3 и поворотным столом и является приводом. Плечо 4 так соединено со стойкой 3 через вал 9, что оно может свободно отклоняться или поворачиваться в направлении стрелки Г в вертикальной плоскости посредством гидроцилиндра 10, который установлен между плечом 4 и стойкой 3 и является гидравлическим приводом. К переднему концу плеча 4 прикреплено гибкое плечо J1, закрытое растягивающимся и гибким кожухом 12. К плечу 11 прикреплена рукоятка 13, которую захватывает оператор, чтобы обучить манипулятор с програмным управлением. Распылитель 14 установлен посредством опорного элемента 15 на штоке 16, который выступает, из плеча 11. Плечо 11 снабжено цилиндрическим основным элементом 17 (несущим звеном) , который установлен на плече 4 с возможностью вращения в направлении стрелки Д вокруг центральной оси 18 и к которому прикреплена пара первых элементов 19 плеча, обращенных широкой плоскостыр друг к другу, Первые спаренные элементы 19 в виде планок соединены перемычкой в виде планки 20. Приводной шток21, пpoxoдяEЦ й через несущий элемент 17 с возможностью перемещения в направлении, параллельном
направлению центральной оси 18, присоединен посредством вала 22 у его переднего конца к паре тяг 23 (элемент связи). Вал 22 имеет центральный участок 24, выполненный в виде шара, к которому шток 21 присоединен у его кольцевого конца 25 так, чтобы он мог поворачиваться в любом требуемом направлении относительно вала 22. Так выполнено шаре вое соединение центрального участка 24 вала 22 и кольцевого конца 25 штока 21, К обоим концам вала 26, который проходит с возможностью вращения через тяги 23, прит соединена с возможностью вращения пара вторых элементов 27 в виде планок. Последняя присоединена с возможностью вращения к первым элементам 19 плеча посредством валов 28. Пара третьих элементов 29 плеча, обращенных широкими сторонами друг к другу, присоединена с возможностью вращения к вторым элементам 27 плеча посредством валов 30 и дополнительно соединена с возможностью вращ ния с одними концами пары тяг 31 (элементов связи), соединенных через валы 32. Другие концы спаренных тяг 31 соединены с возможностью вращения с другими концами первых элементов 19 плеча через вал 33. Спаренные третьи элементы 29 соединены планками 34. Другие концы вторых элементов 27 плеча присоединены с возможностью вращения через валы 35 к одним концам тяг 36, другие концы которых соединены с возможностью вращения через валы 37 с одними концами пары четвертых элементов 38 плеча, вьтолненных в виде планок. Спаренные четвертые широкие элементы 38 плеча соединены с возможностью вращения с третьими элементами 29 плеча посредством валов 39. Пара пятых эле ментов 40 плеча, которые вьшолнены широкими аналогично упомянутьм элементам плеча и обращены друг к другу, соединена через валы 41 с одними концами тяг 42 (элементов связи), другие концы которых соединены через
валы 43 с другими концами третьих элементов 29 плеча. Планочные спаренные пятые элементы 40 плеча связьшаются посредством пары пленочных элементов 44. Пятые элементы 40 плеча соединены с возможностью вращения у их центральных участков с другими
концами четвертых элементов 38 плеч через валы.
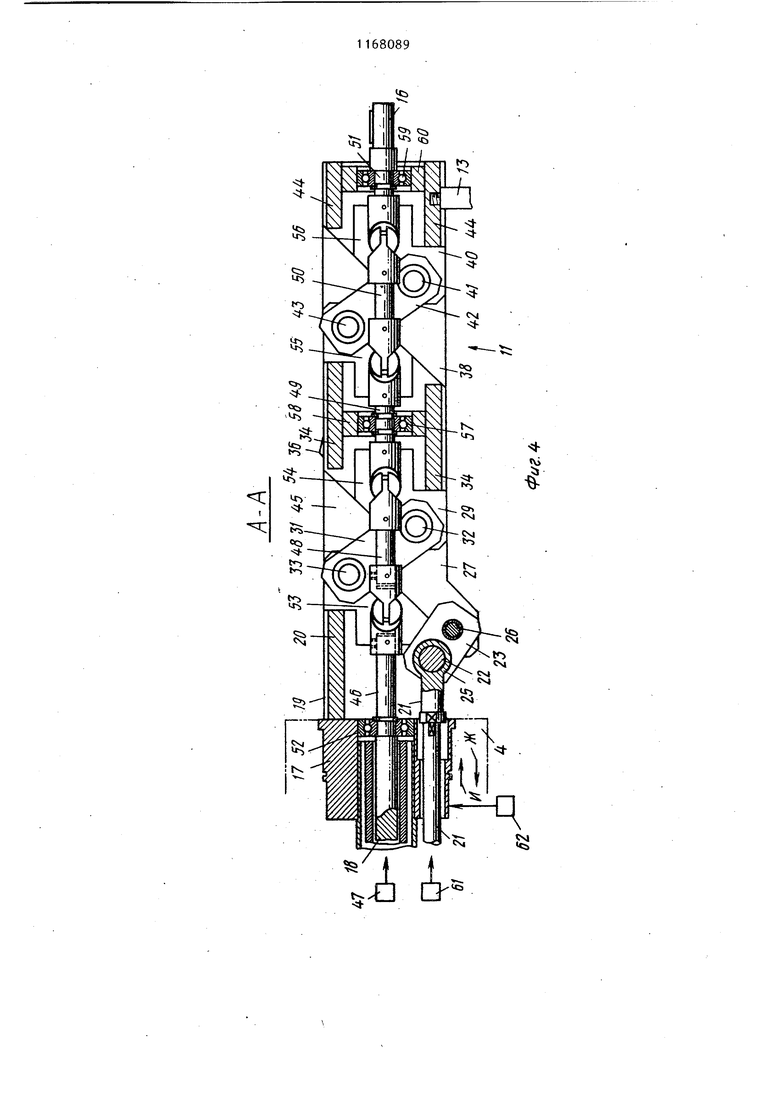
Механизм 45 вращения распылителя который проходит по cyniecTBy по ценральной оси 18 плеча 11, содержит продольную тягу 46, которая соединена с приводом 47,- продольные тяги 48, 49, 50 и 51. Продольная тяга 46 расположенная между спаренными элементами 19 плеча, так опирается посредством элемента 17, что может вращаться в подшипнике 52 в направлении Д по центральной оси 18. Продольная тяга 46 и продольная тяга 48, установленные между спаренными элементами 27 плеча, продольная тяга 48 и продольная тяга 49, вставленные между спаренными элементами 29 плеча, продольная тяга 49 и продольная тяга 50, вставленные между спаренными элементами 38, продольная тяга 50 и продольная тяга 51, вставленные между спаренными элементами 40 плеча, соединены универсальными шарнирами 53, 54, 55 и 56 соответственно, так что когда плечо 11 изгибается, механизм 45 поворота распылителя соответственно изгибает Продольная тяга 49 установлена с воможностью вращения посредством подшипника 57 на опорном элементе 58, который прикреплен к планкам 34. Аналогично продольная тяга 51 установлена с возможностью вращения посредством подшипника 59 на опорном элементе 60, который закреплен на планках 44. Шток 16 прикреплен к продольной тяге 51 так, что он вращается в направлении Д, когда механизм вращения распылителя вращается в направлении Д.
К штоку 21 присоединен гидропривод 61, посредством которого шток 21 перемещается вперед и назад в направлении стрелки Ж или И, т.е. в направлении центральной оси 18. Гидропривод 62 так соединен с элементом 17, что он может поворачивать последний, в направлении стрелки Д. Таким образом, вращение элемента 17 и тяги 46 может осуществляться независимо друг от друга.
Манипулятор 1, имеющий гибкое плечо, работает следующим образом.
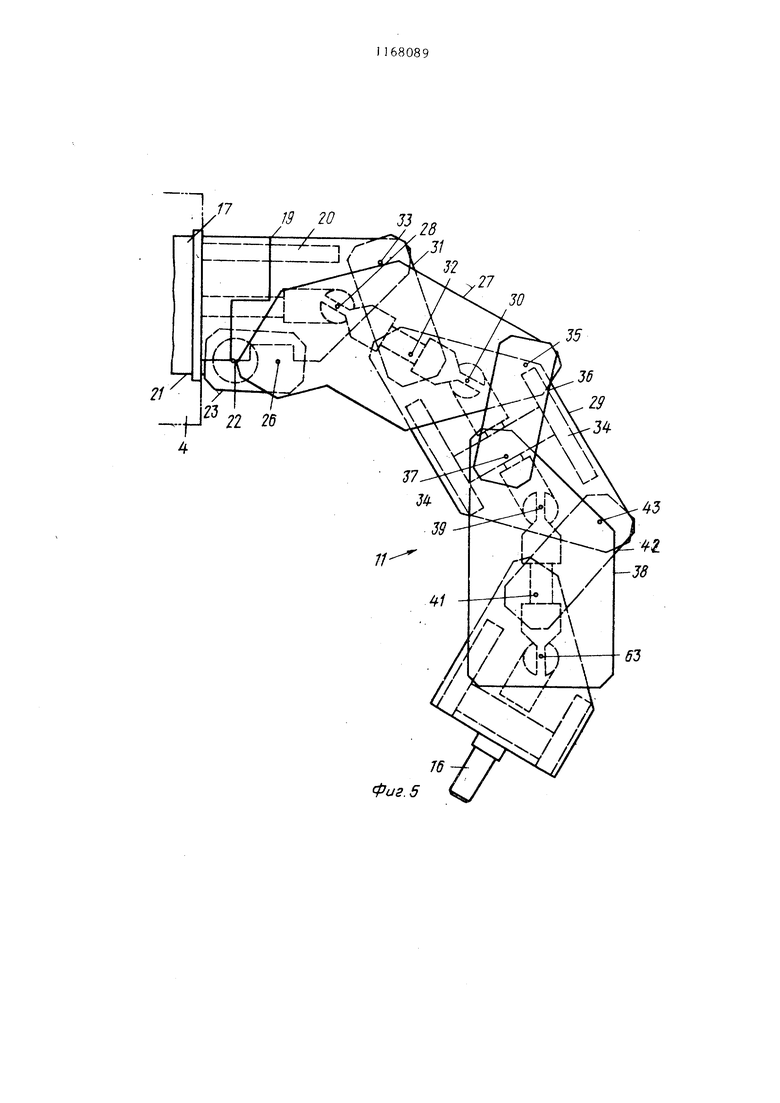
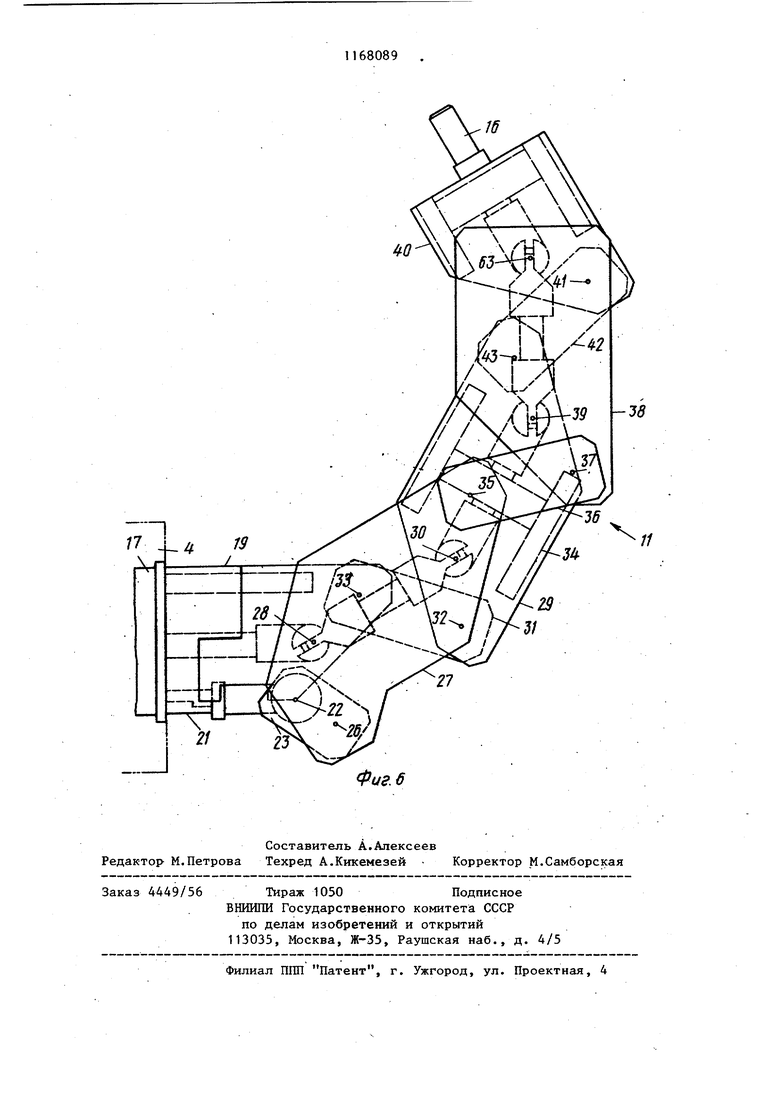
Стойка 3 поворачивается вокруг центральной оси 6 с помощью гидропривода, установленного в платформе 2, и отклоняется в вертикальной плоскости вокруг вала 7 с помощью гидропривода 8, а плечо отклоняется в вертикальной плоскости вокруг вала 9 с помощью гидроцилиндра 10. Когда элемент 17 поворачивается вокруг центральной оси 18 посредством гидропривода 62, плечо 11 аналогично поворачивается относительно центральной оси 18 и, когда тяга 46 поворачивается вокруг центральной оси 18 посредством привода 47, шток 16 поворачивается, в результате чего распылитель 14 поворачивает Когда шток 21 перемещается в направлении И, например, под действием гидропривода 61, вторые элементы 27 плеча поворачиваются в направлении стрелки Е вокруг валов 28. Когда элементы плеча поворачиваются в направлении стрелки Е, тяги 31 пово рачиваются в направлении Е вокруг в лов 30. Когда третьи элементы 29 пово- рачиваются в направлении Е, тяги 36 поворачиваются в направлении Е вокр валов 35 и четвертые элементы также поворачиваются в направлении Е вокруг валов 49. Когда четвертые элементы 38 плеча поворачиваются в направлении Е, тяги 42 поворачивают ся в направлении Е вокруг валов 43 9 и пятые элементы 40 плеча также поворачиваются в направлении Е вокруг валов 63. В результате плечо 11 изогнется так, как показано на фиг. 5. Когда плечо 11 изогнется таким образом, механизм 45 поворота распылителя также изогнется в соответствии с изгибом плеча 11. Даже в этом состоянии шток 16 может вращаться при вращении тяги 46 с помощью усилия привода 47. Кроме того, плечо 1 1 само по себе также может поворачиваться с помощью привода 62. Наоборот, если шток 21 переместится в направлении Ж под действием гидропривода 61, плечо 11 изогнется в направлении противоположном тому, что приведено на фиг. 5, т.е. так, как показано на фиг. 6. Даже при изгибании, показанном на фиг. 6, шток 16 и плечо 11 сами по себе могут вращаться независимо друг от друга. Предлагаемое изобретение может быть использовано не только для манипулятора при покраске и манипуляторов для сварки, управляемых ЭВМ, но также, например, дпя манипуляторов для захвата заготовок.
to фиг. 5 / / V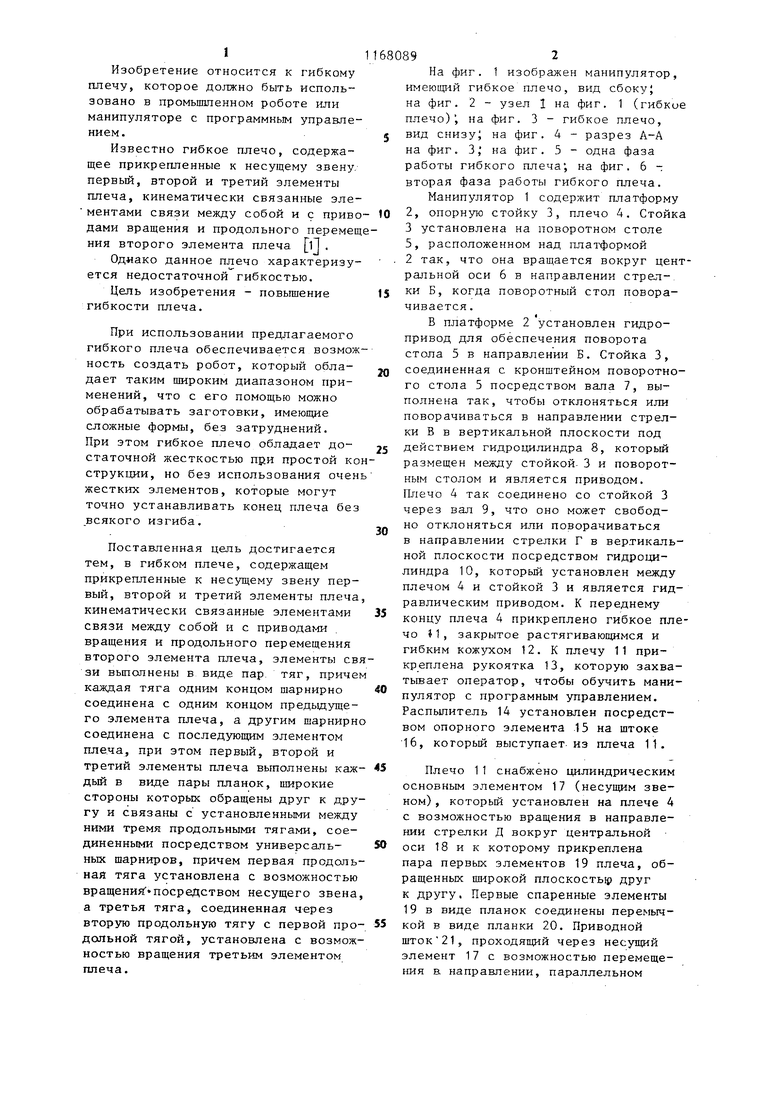
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| ЭЛЕКТРОБРИТВА | 2010 |
|
RU2415746C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2007 |
|
RU2332829C1 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
ГИБКОЕ ПЛЕЧО, содержащее прикрепленные к несущему звену первый, второй и третий элементы плеча, кинематически связанный элементами связи между собой и с приводами вращения и продольного перемещения второго элемента плеча, о.т л и чающееся тем, что, с целью .г повышения гибкости плеча, элементы связи выполнены в виде пар тяг, причем каждая тяга одним концом шарнирно соединена с одним концом предыдущего элемента плеча, а другим шарнирно соединена с последукицим элементом плеча, при этом первый, второй и третий элементы плеча выполнены каждый в виде пары планок, широкие стороны которых обращены друг к другу и связаны с,установленными между ними тремя продольными , соединенными посредством универсальных шарниров, причем первая продольная тяга установлена с возможностью вращения посредством СП несущего звена, а третья тяга, соединенная через вторую продольную тягу с первой продольной тягой, установлена с возможностью вращения третьим элементом плеча.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU770779A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
